多旋翼噴霧無人飛行器的設計和試驗研究
2019-12-21 07:26:48胡彩旗邵明赫王存鵬陳大偉蘭玉彬王正田
農機化研究 2019年3期
胡彩旗,邵明赫,王存鵬,陳大偉,蘭玉彬,王正田
(1.青島農業(yè)大學 a.機電學院;b.科技處,山東 青島 266109;2.華南農業(yè)大學 工程學院,廣州 510642;3.青島前哨風動工具制造技術有限公司,山東 青島 266109)
0 引言
帶有噴霧裝置的多軸無人機起降大多不需要專用的機場,且飛行穩(wěn)定性高,操控性能好,作業(yè)靈活。隨著農業(yè)航空步伐飛速發(fā)展,無人植保機越來越受到農民的肯定和青睞;但是各種植保飛行器的出現,實際質量良莠不齊,難以達到作業(yè)、飛行穩(wěn)定及可靠續(xù)航的合理搭配[1-4]。
本文設計制作了一種成本較低、能夠實現中小田塊穩(wěn)定高效作業(yè)的電動多旋翼噴霧飛行器,旨在為今后農業(yè)植保飛行器的設計提供一種借鑒。首先給出飛行器基本參數的選定和測試方法,然后進行性能參數分析;經拉力試驗驗證設計的可行性之后,繪制各機體結構切割圖,由激光切割機得到所需碳纖板材。遵循可靠性和減少自重的原則,選擇合適的接合部件,對機體進行搭建、布線、裝配,測得各電氣元件工作電流、電壓,檢查機箱內散熱是否可靠。在各參數確定下進行功耗分析,選擇相應的動力電池。田間試驗選擇小麥地,采用水敏試紙進行霧滴采樣,借助DepositScan軟件進行樣本霧滴沉積分布計算,以對噴灑效果進行分析,得到不同相對風速和風場影響下的霧滴分布規(guī)律。
1 多旋翼噴霧飛行器的設計
1.1 總體設計
多旋翼一般采用圓形對稱結構布局,均采用電池動力驅動,飛行中所產生的氣流是多個旋翼共同作用的結果[5-7],飛行過程中旋翼的反扭矩抵消,飛行穩(wěn)定。圓形多軸多旋翼無人直升機除了具有作業(yè)高度低、可垂直起降、無需專用起降機場、操作靈活輕便及環(huán)境適應性強等突出優(yōu)點外,與單軸單旋翼無人直升機相比,還具有機械結構更簡單、易折疊拆卸、飛行更平穩(wěn)及模塊化程度高等特點[8-9]。
本文所設計的八軸無人機的主要組成部分包括飛行控制系統、動力系統和噴霧作業(yè)系統。對于一架用于植保的無人機,使用者最關心的參數是任務載荷和續(xù)航時間,所以在設計時應該重點考慮。下面列出本無人機的基本參數,如表1所示。
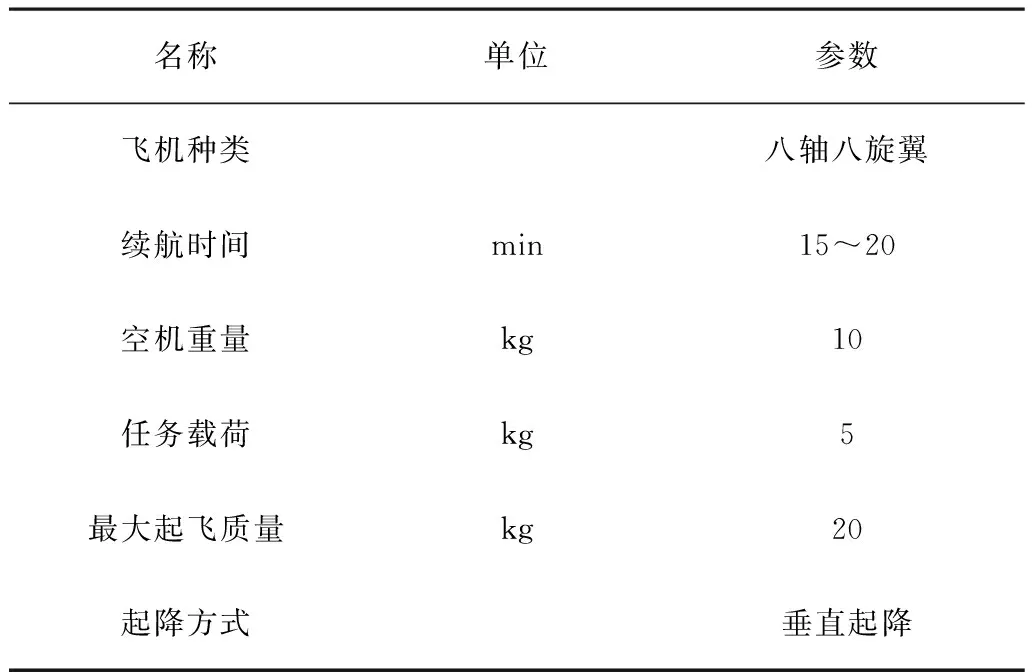
表1 飛行器基本參數
定義負載重Wl,機體(包括電池)重Wb,懸臂(包括電機)重Wa,電機數Nmotor。
在標準狀態(tài)下的無人機總重W[10-11]為
(1)
式中Ta—實際溫度(K);
Pa—大氣壓強(MPa);
Pw—水蒸氣分壓(MPa)。
設懸停狀態(tài)下單個電機的拉力為La,電機所需提供的最大拉力Lmax可表示為
(2)
其中,α為安全裕量,一般取為0.5。
電池容量的選擇對飛行器的飛行時間有很大影響,然而對于不同的飛行狀態(tài),其功耗有所不同,很難精確地推導出電池能夠維持的飛行時間。考慮到植保作業(yè)大都為移動狀態(tài),功耗主要為電機的消耗,對于給定的飛行時間h,電池容量C可用式(3)近似得到,即
C≥k(NmotorIa+Ip)h
(3)
其中,Ia為作業(yè)狀態(tài)下單個電機電流;Ip為藥泵電流;k為安全系數,一般取為1.5。
1.2 制圖分析
制圖是飛行器設計的重要部分,使用的軟件通常有Auto CAD、CATIA、Solidworks及UG等。本設計采用Auto CAD和CATIA。在進行三維制圖前,首先需要確定軸距,具體做法如下:①在 CAD 中,以螺旋槳的長度為直徑畫圓;②平移該圓,保證原心距離比直徑長30mm,加工時,周邊夾持余量留10mm。本設計中,由于零件較少,自行加工成本偏大,所以采用外購的方式;對外購件進行測繪并畫出三維圖以合理搭配自加工件。機臂采用碳管,在CATIA中以底板為基礎,裝配折疊件和電機座,約束電機軸距為1 254mm,電機座和折疊件的剩余距離就是碳管長度(夾持余量留10mm)。上蓋板和下蓋板的外形尺寸相同,不同之處在前者中心有一個維護孔,以便于對行控制系統進行維護,在機頭位置畫出電源接口。起落架根據便于折疊運輸的原則進行設計,在8個折疊件所連接的碳管和電機下放的同時,位于起落架上的噴桿可在折疊件的幫助下向上折疊,可方便在不同作業(yè)場地間的運輸。植保機電路系統應相對封閉,所以在上下蓋板之間加側板,防水防塵。固定孔根據強度,按照經驗畫出,具體見上、下蓋板。碳纖維結構需要自行加工,遵循節(jié)約的原則,合理排版,部分零件圖和碳纖維結構件排版設計如圖1~圖3所示。
圖1 電機座
圖2 機臂連接折疊件
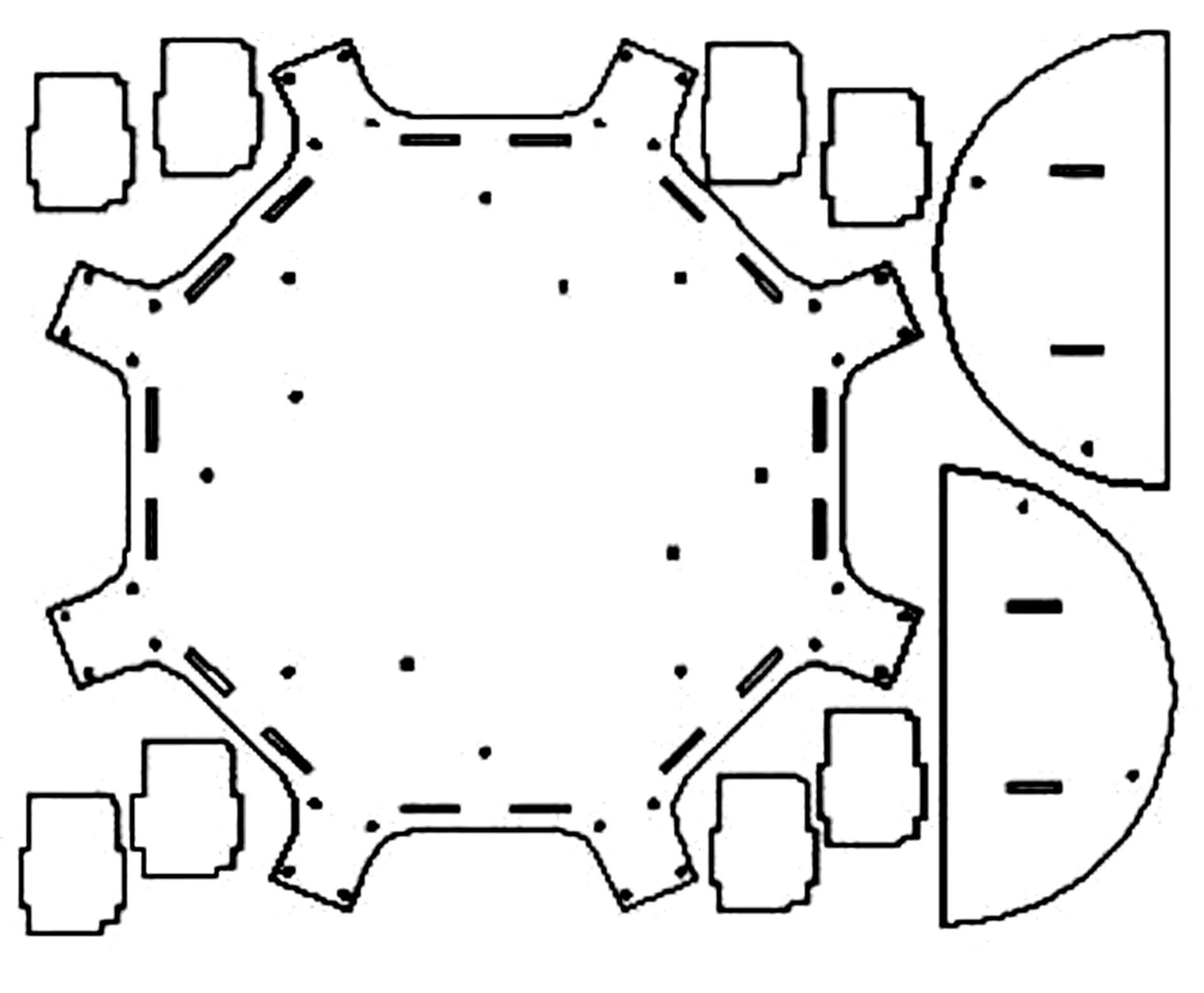
圖3 機體切割板制圖
1.3 部件選用
飛機各部件的選用,盡可能選擇市面上已有的標準件,可提高互換性,節(jié)約組裝和維修成本。電機、電源、螺旋槳、電池及藥泵等選擇余地較大,一般可直接外購。機架、折疊件、電機座等根據實際需要,在權衡成本之后確定是否自行加工。多旋翼大載重飛機,選擇低 KV 值的盤式電機,此類電機轉速低、扭矩大、耗電小,結合無人機的飛行經驗,選擇零度智控公司的主流駕駛儀—X4V2。折疊件優(yōu)先選用市面上成熟的結構,且要具有一定的上反角。機臂的尺寸根據經驗和折疊件的尺寸確定。起落架的具體尺寸要根據飛機設計數據選擇,當市面現有起落架不能滿足要求時,要進行定做。所以,起落架選用放在設計最后進行。藥泵的噴灑速度靠直流電源控制,直流電源型號的選擇既受制于藥泵的輸入電壓又受制于電池的輸出電壓。電壓越大,藥泵動力就相對較足,所以直流電源和藥泵,都選擇24V版本。鋰聚合物電池具有質量輕、容量大、放電倍率高等優(yōu)勢,已迅速成為航空航天無人機及相關模型使用的主流動力電流,因此在設計中,選用鋰聚合物電池。由表3知:穩(wěn)態(tài)作業(yè)時電流約為7.5A,根據式(3),并考慮給突發(fā)情況一定的裕量時間,選用額定電壓24.2V,6S1P,16 000mAh,放電系數15C的鋰聚合物電池,該電池最大放電電流大約為240A。
基于上述設計選用各部件,其質量匯總如表2所示。
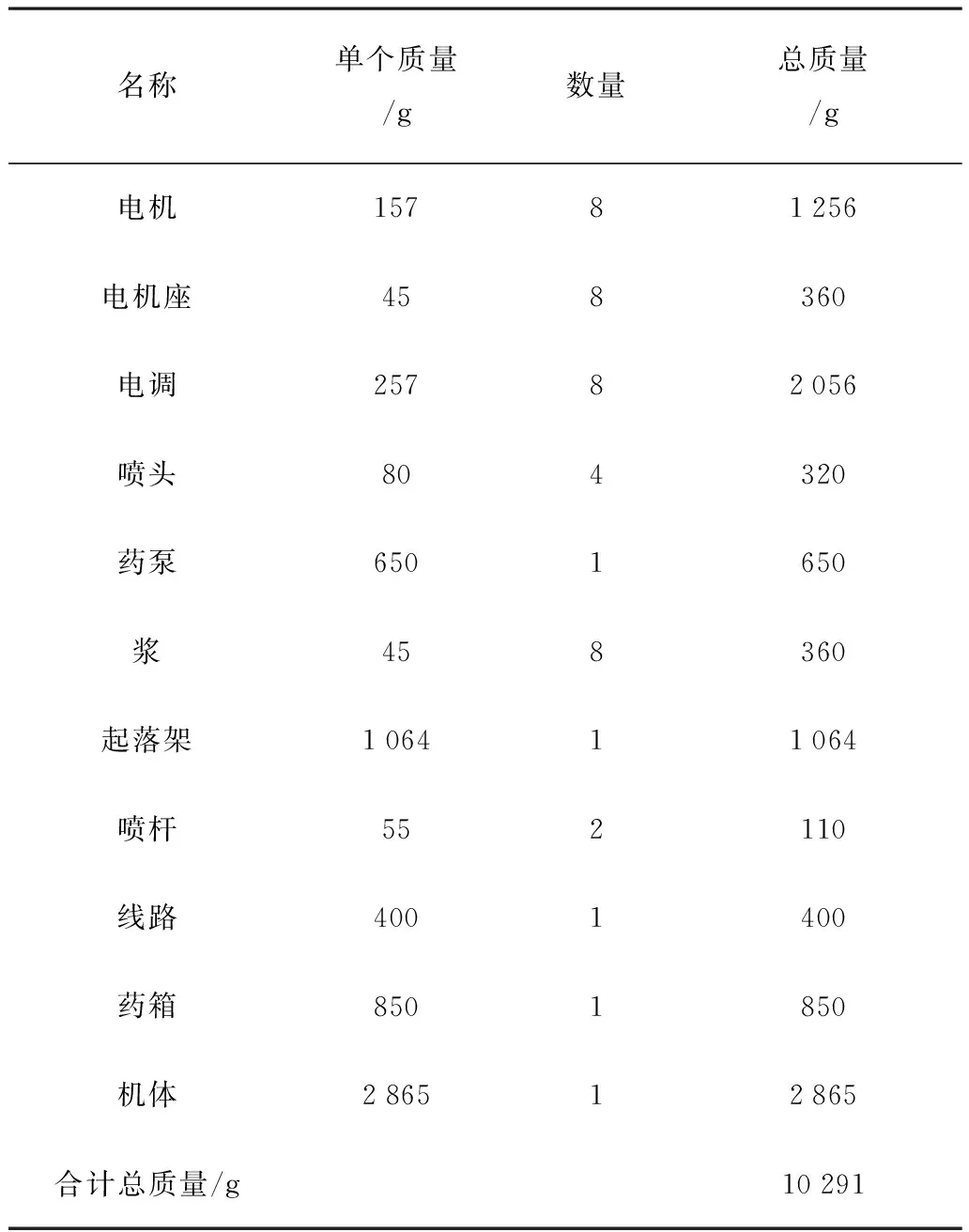
表2 質量參數表
2 多旋翼噴霧飛行器的裝配及可行性驗證
2.1 拉力試驗
螺旋槳系統是旋翼機的動力系統,其升力特性是旋翼機設計與控制必須認真考慮的重要因素[11]。本設計根據動力系統理論數據,以及方便操作的原則,在發(fā)射機油門撥桿置中(實際60%油門行程)時,單個電機拉力應達到La≥1.9kg以滿足工作負荷(5kg)下的懸停要求,La≥2.6kg以滿足最大設計起飛質量。
由于電機安裝平面與水平面存在5°的上反角,所以實際所需拉力La約為:1.9/cos5°= 1.91kg,即總有效拉力為15.28kg,才能滿足有效載重5kg,以達到設計最大起飛質量的要求。所選用電機在24V穩(wěn)壓下配合1755碳槳的工作參數如表3所示。
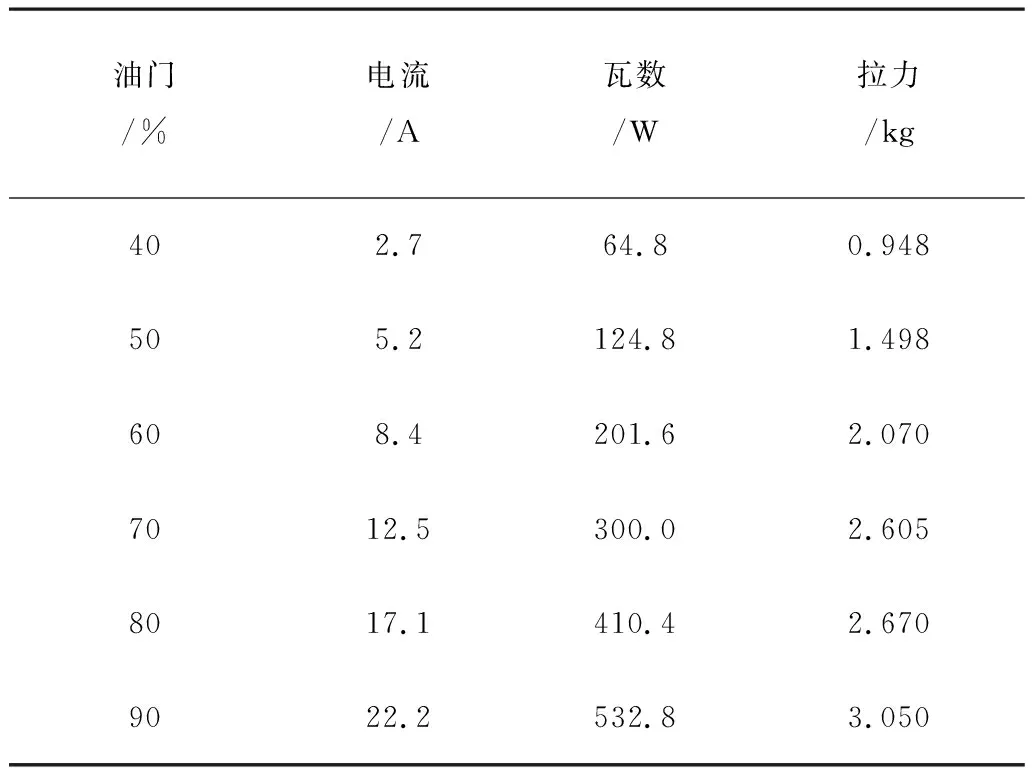
表3 電機在24伏穩(wěn)壓下的參數
表中油門代表實際可控行程,表4同。
試驗過程用到的材料及工具有:電子秤、電機、纖維膠帶、鐵塊10kg、電池、旋翼、發(fā)射機、 接收機及電調。試驗步驟:①將旋翼反向安裝到電機上,確保所有螺絲已經擰緊到位并檢查;②將安裝好的電機與旋翼通過纖維膠帶固定在鐵塊上,用固定件將鐵塊夾緊在電子秤上并檢查是否牢固;③將電子秤放置在較大摩擦因數的平面上并固定,連接接收機和電調;④清空場地后打開發(fā)射機,然后接通電源(試驗前接收機與發(fā)射機已對頻);⑤確認安全后,在旋翼靜止的情況下記錄電子秤顯示數值,緩慢推油門,每提高10%記錄1次電子秤數值;將油門推至1/2處,檢查是否達到作業(yè)所需的1.91kg,繼續(xù)緩推油門桿,測試在達到油門最大行程之前是否滿足最大起飛質量所需的單軸2.63kg拉力。通過反向安裝旋翼使之產生向下的推力,通過電子秤數值與靜態(tài)下數值的差值,測出單個電機產生的拉力,驗證是否達到設計標準。
經實際測試,所有電機、電調與旋翼的組合均達到設計所需的要求,即在發(fā)射機油門桿1/2處單個旋翼產生2.19kg拉力,在90%油門時產生3.17kg拉力,完全滿足式(1)、式(2)的要求,可以用于本植保機設計。根據式(3)八旋翼最大電流總和小于2.3節(jié)中選用的鋰聚合物電池所能達到的最大放電電流。試驗數據如表4所示。
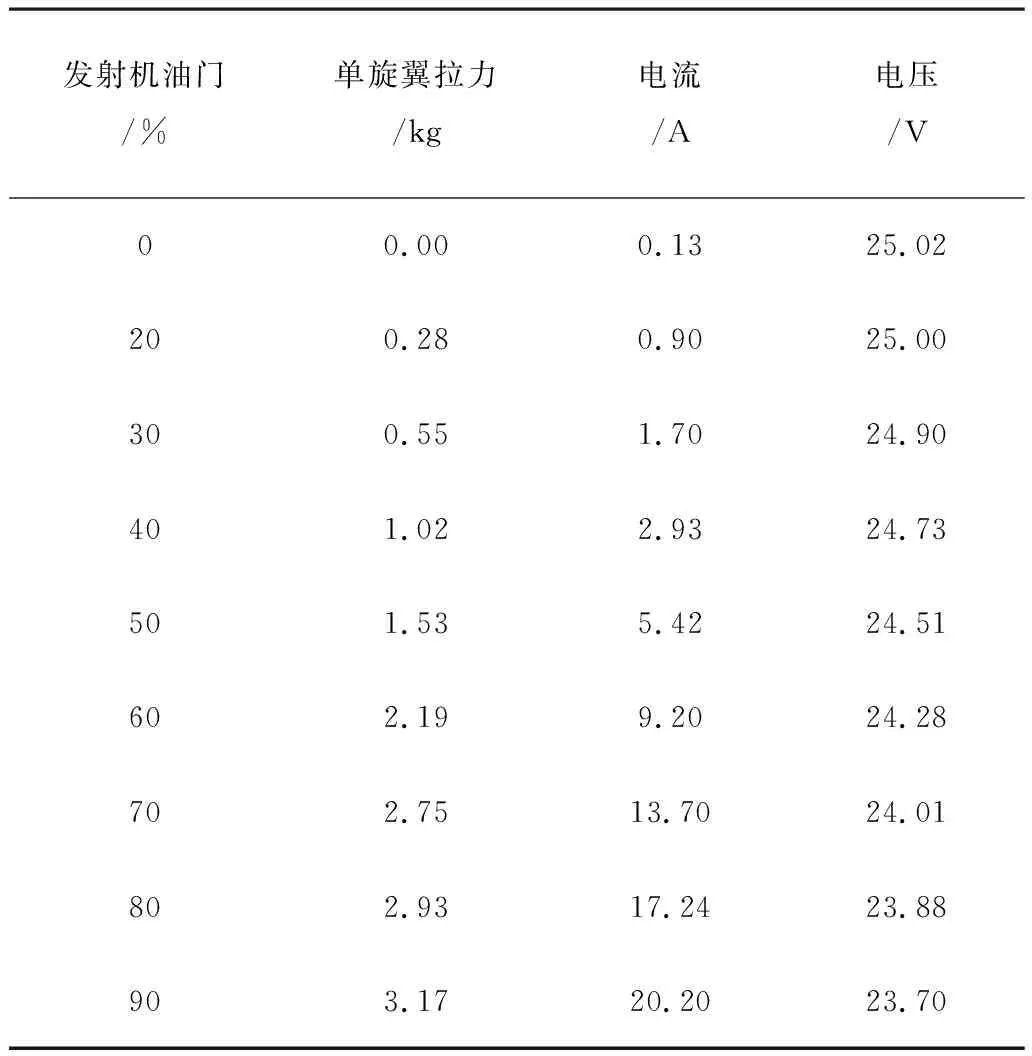
表4 拉力試驗數據
2.2 機體組裝
材料及工具有:M3螺母及螺絲、螺紋膠、螺絲刀、機體散件電鉆、銼刀、設計圖、砂輪機、馬克筆及游標卡尺。參與組裝所有人員通過設計圖討論焊接分工、順序以及注意事項。檢查零件數量,分類并記錄,確認零件無誤,并進行稱重。將肘節(jié)機構安裝至底座,將因加工誤差產生的缺陷進行處理,安裝機臂;將長碳管用砂輪切割為設計的尺寸,即390mm,共切割8根,安裝電機。
2.3 電路焊接
按照飛控設計圖,進行電路連接,焊接時應從下至上,以免出現已安裝好的部分干擾下一步安裝的情況。因為焊接過程中產生的氣體會使人皮膚紅腫刺癢,焊接時最好穿著護具,若無護具,應沾水操作,完成后徹底清洗工具及暴露的皮膚。裝配完成的樣機如圖4所示。
3 噴霧試驗分析
3.1 試驗設計
使用皮尺量取 30m × 25m 大小且較為空曠的小麥田塊,并放置標記物,作為試驗田塊。用水敏試紙反映噴霧在葉片上的效果,在預先規(guī)劃的作業(yè)航線(見圖5)兩側布置試紙,以南北為X軸,東西為Y軸,飛行路徑為從西向東,之后關閉噴霧就近降落以免影響測試效果。航線左右兩側(南北方向)分別設置3個采樣點,每個采樣點在作物的頂葉、中葉和離根部最近位置選取結實粗壯葉片用別針固定水敏試紙分別于上下面葉片。航線正對方向(東西)共設設置4排采樣點,進行3次試驗。

圖4 樣機實物
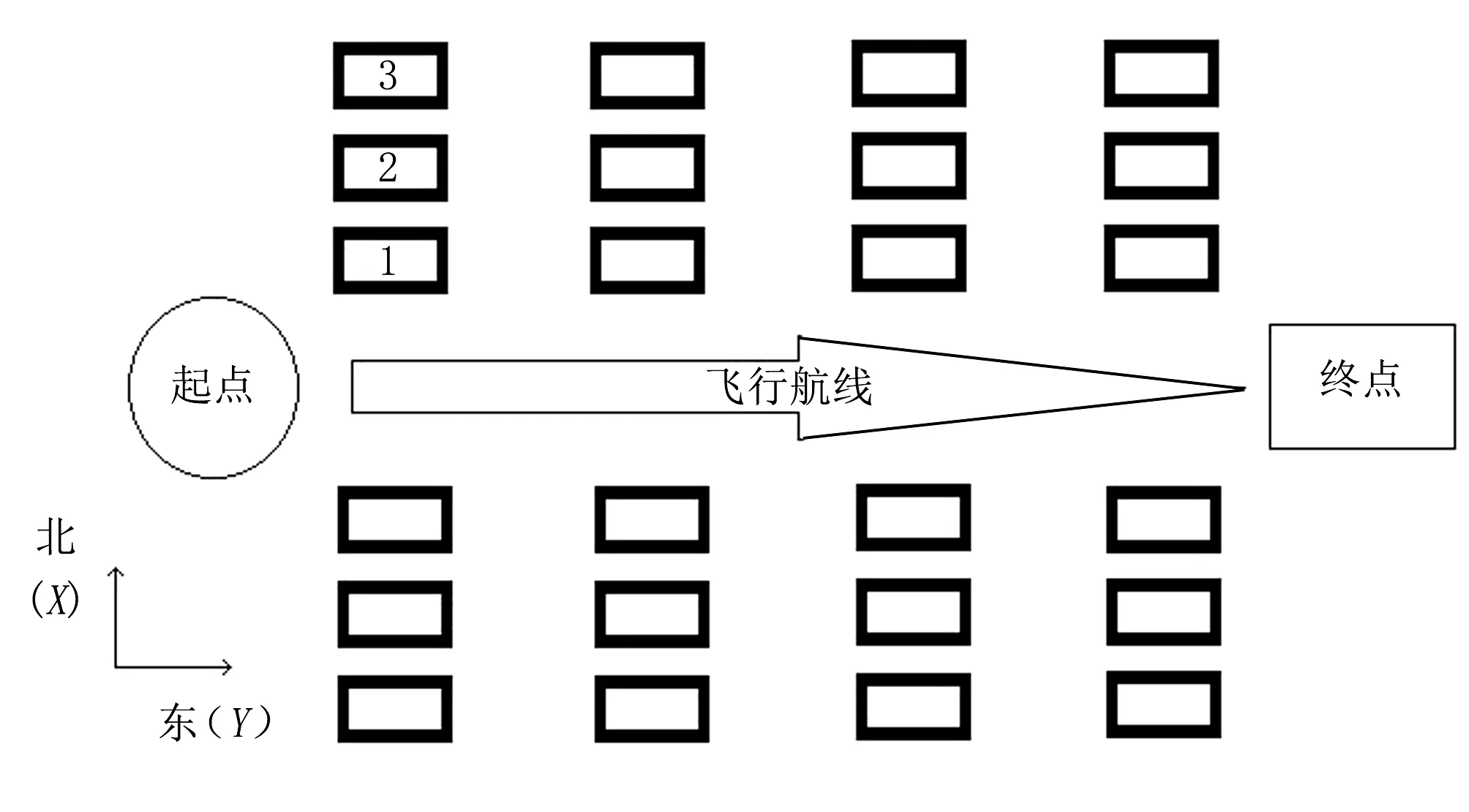
圖5 試驗場地布置示意圖
3.2 試驗步驟
首先在實驗室內測取噴霧流量。具體方法是將機器放在開闊處,取4個燒杯由支架固定在噴頭正下方,杯口要高于噴嘴底部以防止濺出。給水箱加水5L,卸去旋翼,通電并打開藥泵,待水霧開始噴出一段時間后檢查確定輸水管內無氣體并暫停噴灑,清空燒杯;再次將燒杯放置完畢并打開藥泵,計時1min,計時結束后測量4個燒杯內總水量,再按如上步驟進行兩次實驗取平均值,得到平均流量為1.53L/min。
將飛行器平穩(wěn)地放置在試驗點田間道路上,接通電源等待系統初始化完畢,飛至相對作物頂點2m高處懸停,同時開啟藥泵進行噴霧作業(yè),開始計時。操控飛行器按照預定軌跡飛行,速度保持約2m/s,當飛行器完成整個田塊作業(yè)時記錄時間,戴干燥的手套回收水敏試紙,給每個試紙做標記并和干燥劑一起放入塑料瓶內。待試驗環(huán)境恢復,布置第2組試驗。飛機飛至作物頂點上方2m,以2m/s的速度再次完成航線作業(yè),以同樣的方法回收采集數據。同樣準備第3組試驗。第3組試驗開始,飛機懸停至第1個采集帶前的作物定點上方2m,以逐漸加速的方式完成航線作業(yè),同樣回收采集數據,將所有采集數據細致分類后帶回實驗室,使用DepositScan軟件對所記錄的試驗數據進行統計分析。試驗條件和歸納后的數據分別如表5、表6所示。速度為平均飛行速度,由測量和計時計算得來,噴霧流量在測試前測出,整個試驗過程采取相同流量作業(yè)。
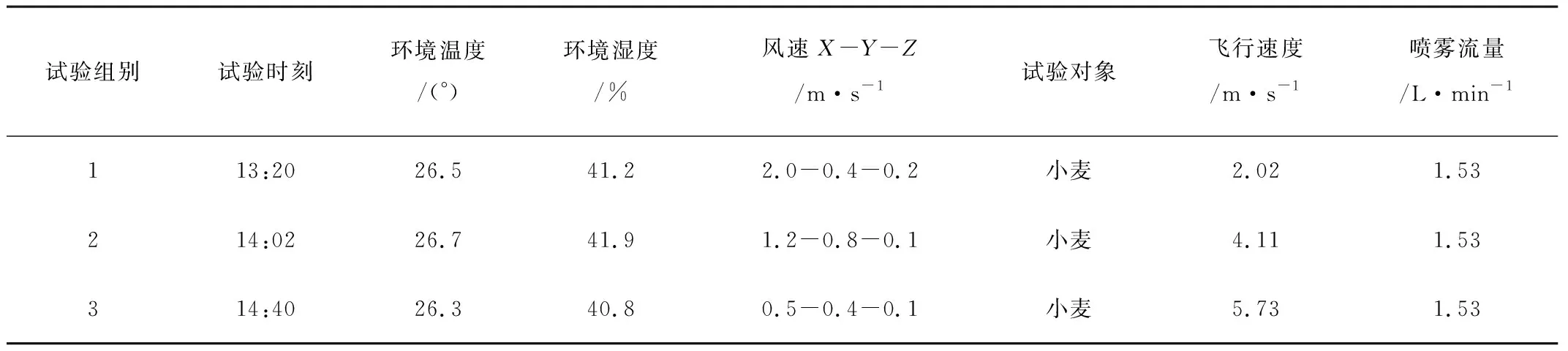
表5 試驗環(huán)境數據
3.3 數據分析
每組試驗取第3排采樣帶匯總于表6,表6中數據為第3排采樣帶以作業(yè)航線為軸,以互對點中部葉片上的上下雙面試紙所采集沉積量取平均值。經過匯總,同一組試驗葉片上下兩面沉積量極差不超過0.15,覆蓋率皆在15%以上,極差不超過2.5%,霧滴分布效果良好,模擬所得的葉片受液量滿足植保要求。
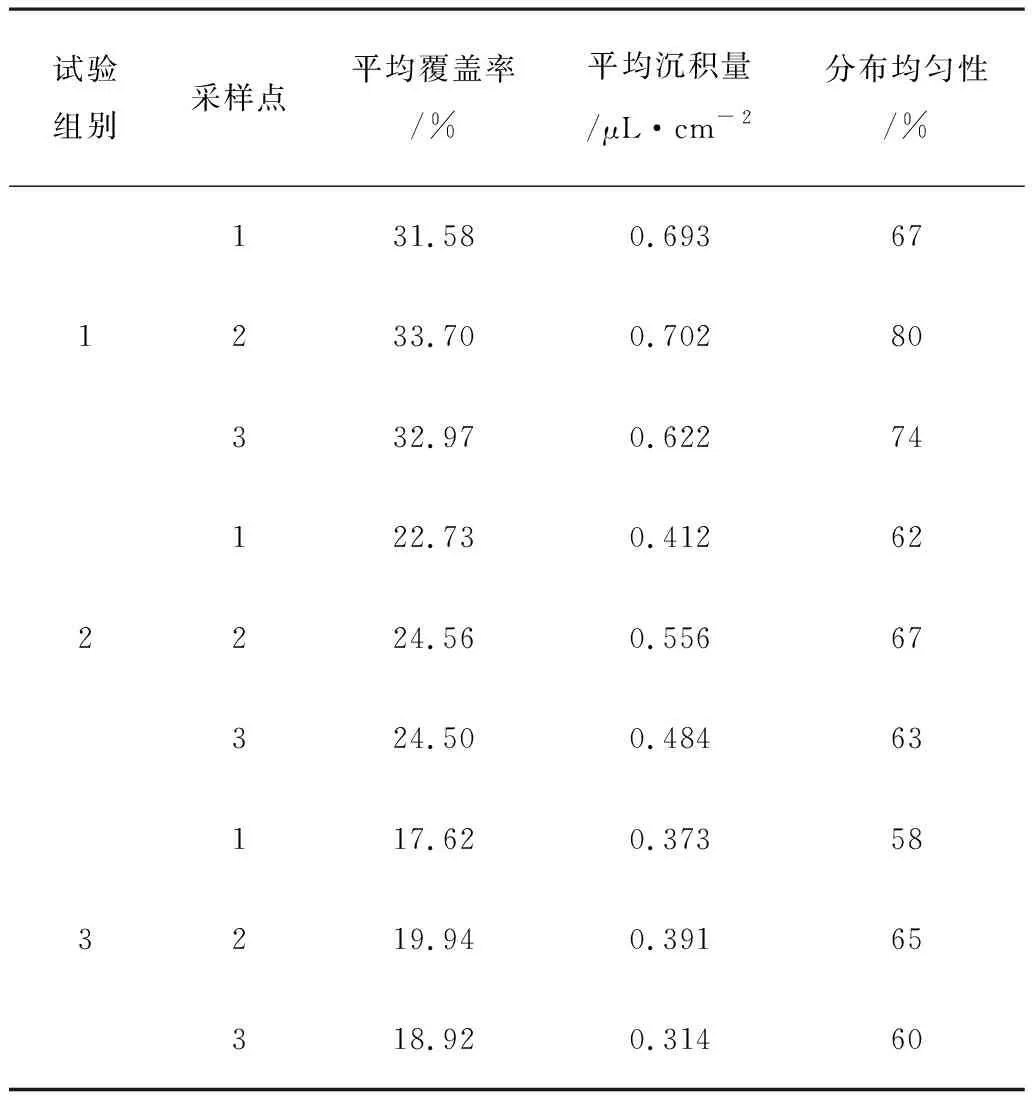
表6 試驗樣本霧滴沉積量和分布
取一般作業(yè)條件(飛行速度2m/s,作業(yè)高度為植株頂部2m),即試驗組1的第3排采樣帶其中一側第2個采集點中部葉片上下兩面的試紙結果為例,分析如圖6所示。
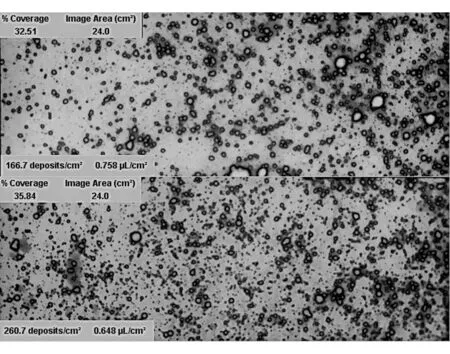
圖6 樣本分析結果
由圖6中可以看到:除個別由于葉片傾斜導致的局部不均,霧滴在葉片上的分布較為均勻。通過試驗驗證了該飛行器可載質量5.0kg液體藥物穩(wěn)定作業(yè),總續(xù)航時間15min左右,在精量噴霧的情況下,飛行器作業(yè)最快效率可達8.78m2/s,效率較高。
根據文獻[1],該多旋翼飛行器風場能很好地吻合霧滴沉積分布規(guī)律,且垂直地面向下的氣流可以有效增大霧滴沉積率,說明該無人機的下旋氣流場在垂直地面方向向下對霧滴沉積效果提升影響顯著。
4 結論
所設計的飛行器具有體積小、速度快、效率高及噴霧精準的特點,可以適合在一般的環(huán)境中使用,其通過電池供電且耗電量低,節(jié)能效果很好,可為此類飛行器設計提供參考。農業(yè)航空當今正走在飛速發(fā)展的道路上,很多配套設施、制度建設還不夠完善。隨著農業(yè)航空的需求日益旺盛,國家相關扶持和約束的政策對農業(yè)航空的健康發(fā)展起到關鍵性作用,相信未來將會有跨農、工等多部門的農業(yè)航空管理機構產生,也會有許多相應的標準來規(guī)范農業(yè)航空生產。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
現代裝飾(2020年7期)2020-07-27 01:27:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
