Robust adaptive compensation control for unmanned autonomous helicopter with input saturation and actuator faults
2019-12-19 02:06:42KunYANMouCHENQingxinWURonggngZHU
CHINESE JOURNAL OF AERONAUTICS 2019年10期
Kun YAN, Mou CHEN,*, Qingxin WU, Ronggng ZHU
a College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
b Luoyang Institute of Electro-Optical Equipment of AVIC, Luoyang 471000, China
KEYWORDS
Compensation control;
Fault tolerant control;
Input saturation;
Tracking control;
Unmanned autonomous
helicopter
Abstract This paper studies a robust adaptive compensation Fault Tolerant Control(FTC)for the medium-scale Unmanned Autonomous Helicopter(UAH)in the presence of external disturbances,actuator faults and input saturation.To improve the disturbance rejection capacity of the UAH system in actuator healthy case, an adaptive control method is adopted to cope with the external disturbances and a nominal controller is proposed to stabilize the system. Meanwhile, compensation control inputs are designed to reduce the negative effects derived from actuator faults and input saturation. Based on the backstepping control and inner-outer loop control technologies, a robust adaptive FTC scheme is developed to guarantee the tracking errors convergence. Under the presented FTC controller, the uniform ultimate boundedness of all closed-loop signals is ensured via Lyapunov stability analysis. Simulation results demonstrate the effectiveness of the proposed control algorithm.
1. Introduction
Over the past few years, the extensive applications in military and civil fields of the UAH has made it become an attractive research topic and numerous scientific achievements have been obtained1,2. Especially for the medium-scale UAH featured with long cruise, large payload, high altitude, fast speed and strong robustness, it plays an irreplaceable role in the military field.However,compared with the fixed-wing Unmanned Aerial Vehicle (UAV), UAH has less hardware redundancy.Meanwhile, the complex flight environment increases the possibility of actuator faults, which may lead to severe performance deterioration and even system instability3,4. As a result, with the increasing demands for safety and reliability in practice, compensation control has become an important FTC strategy to deal with the actuator fault and received considerable attentions5-8.
Many results of fault compensation can be found in the published literatures. In Ref.9, a backstepping-based adaptive fault compensation scheme was proposed for satellite attitude control systems with uncertain actuator faults.In Ref.10,based on the dynamics surface control technique,a novel compensation FTC approach was developed for attitude system of UAV with actuator Loss-of-Effectiveness (LOE) faults. By utilizing a descriptor system approach,the problem of sensor fault estimation and compensation for microsatellite attitude dynamics was investigated in Ref.11.An adaptive actuator fault and disturbance compensation scheme, which consisted of backstepping feedback control law and feedforward actuator fault compensator, was presented for attitude tracking control of spacecraft in Ref.12.In Ref.13,an adaptive fault compensation controller was designed and a direct adaptive approach was developed for nonlinear systems in the presence of unknown actuator faults. However, in addition to the actuator faults,the problem of external disturbances also cannot be ignored in the control design.
As we know,disturbances widely exist in industrial systems and bring adverse effects on control performance of the systems14,15. During the flight process of UAH, the airflow can induce bumpiness and thrust fluctuation so that the disturbance rejection is a key objective in the controller design. In order to improve the robustness of the controlled systems, a number of disturbance rejection approaches have been proposed in recent years, such as adaptive control10,16-18,disturbance-observer-based control19,20, extend state observer-based control21, high-gain observer-based control22,etc. Among those disturbance rejection methods, the adaptive control approach is extensively investigated and applied attributing to its simple design process. In Ref.16, the problem of adaptive tracking control for switched nonlinear systems subjected to external disturbances was studied. In Ref.17, sliding mode controllers were designed to force the state variables of a spacecraft with external disturbance to converge to the origin in finite time. A distributed robust adaptive control scheme was developed for multi-agent systems with external bounded disturbances to guarantee the output tracking performance in Ref.18. Unfortunately, due to the existence of actuator faults and external disturbances, more control energy is needed so that it is likely to cause the control input saturation of the system.
Input saturation is a significant non-smooth nonlinearity that always exists in a practical system. As a matter of fact,only limited control force and control moment can be provided in practical flight control system. If the problem of input saturation is not taken into consideration during the controller design, the flight control performance may be severely degraded. Moreover, the stability of whole closedloop system may not be guaranteed23. Up to now, many analysis and design methods of nonlinear control system with input saturation have been reported. In Ref.24, by employing the backstepping method, the design process of attitude controller for the near space vehicle with control input saturation was described. A backstepping-based controller which was applicable for the hover flight of an UAV with input saturation was presented in Ref.25. By using an inner-outer loop control structure, the position controller was designed for a quadrotor UAV with state and input constraints in Ref.26.In Ref.27, an adaptive neural network control scheme was developed for a small-scale UAH in the presence of input saturations and output constraints. In Ref.28, the output feedback dynamic gain scheduled control strategy was proposed to stabilize a spacecraft rendezvous system subjected to actuator saturation. However, when the external disturbances,actuator faults, and input saturation are considered simultaneously in a medium-scale UAH system, the problem of controller design is still a challenging research topic and worthy of further study.
Inspired by the above discussion, a backstepping-based robust adaptive compensation FTC scheme is developed for medium-scale UAH to track the desired trajectory in the presence of external disturbances, actuator faults, and input saturation. The remainder of this paper is organized as follows.Section 2 presents the dynamic model of the medium-scale UAH.The proposed control algorithm is detailed in Section 3.Simulation results are exhibited to verify the effectiveness of the designed controller in Section 4,followed by some concluding remarks in Section 5.
Notations: Throughout this paper, ‖·‖ denotes the Euclidean norms of matrix and vector, respectively.
2. Problem statement
According to the helicopter flight dynamics and aerodynamics,the following model which is composed of translation motion and rotational motion can be used to describe a medium-scale UAH29,30:
In the practical flight control system, input saturation is a potential problem for actuators and it may severely limit system performance. In such case, the control inputs ζi(i=1,2,3,4) can be described as24

Obviously, owing to the existence of input saturation nonlinearity, there is a difference value α(ζi) between the designed control input ζiand the actual control input sat(ζi). Then, we have

In addition, the actuator may become faulty and LOE faults is a kind of frequent actuator faults in the practical flight control system.In this case,the actuator faults in UAH system can be expressed as10

where B=diag{b1,b2,b3,b4}, bi(i=1,2,3,4) represent the remaining unknown actuator effectiveness factors.
Considering Eqs. (2)-(4), the 6-DOF nonlinear model of the medium-scale UAH with external unknown disturbances,actuator faults and input saturation can be written as
The essential issues in the control of a UAH are:(A)What kind of scheme can be employed to control the nominal system with unknown external disturbances; (B) In addition to the above mentioned condition, how UAH can be controlled to achieve a stable system and obtain the satisfactory tracking performance in the presence of actuator faults and input saturation.Therefore,in order to track the desired flight trajectory yd, designing a robust FTC strategy for the medium-scale UAH with unknown external disturbances, actuator faults and input saturation will be the main goal of this work.Before developing the control scheme, the following assumptions are required.
Assumption 127. The roll angle φ and pitch angle θ satisfy inequality constraint -π/2 <φ <π/2 and -π/2 <θ <π/2,respectively.
Assumption 310.The unknown actuator effectiveness factors bi(i=1,2,3,4) are assumed to be bounded such that 0 <χ ≤bi≤1, where χ is the known lower bound of bi.
Assumption 418.The unknown continuous functions D1and D2are supposed to satisfy‖D1‖≤σ1and‖D2‖≤σ2,σ1and σ2being unknown positive constants.
Assumption 524.For the UAH system(5),there exist known continuous function vectors h1(ξ,τ)∈R1×3and h2(η,δ)∈R1×3making α(Tmr)| |≤h1(ξ,τ)s1and ‖α(Σ)‖≤h2(η,δ)s2hold,where s1∈R3and s2∈R3are unknown constant vectors.
Assumption 623. For the practical medium-scale UAH system (5) with input saturation and desired trajectory, there should exist a feasible actual controller ζ which can make the UAH achieve the tracking objective.
Remark 1. Due to the external disturbances, actuator faults and input saturation, the control design of the UAH system becomes more complicated.In order to promote the controller design, the external disturbances, actuator faults and desired trajectory are assumed to be bounded. In fact, the external disturbances can be largely attributed to the exogenous effects and they have finite energy in practical control system.Furthermore, for a practical UAH system described as Eq.(5), there should exist a feasible control input which can complete the tracking task. If the desired trajectory is unbounded, the controller is not likely to have enough energy to perform the task. Similarly, if the actuator lose too much effectiveness, the whole system may lose the capacity of fault tolerant control. Therefore, it is reasonable for Assumptions 2-4.
Remark 2. Apparently,the desired control input may be larger than the actual control energy provided. However, we should note a fact that the difference between them cannot be larger.From the view of a practical flight control system,there should exist a feasible control input and the system controllability should be satisfied whether the input saturation exists or not.Thus, the Assumptions 5-6 are reasonable for the UAH system with input saturation.
3. Design of robust adaptive compensation FTC scheme
In this subsection, by using the adaptive and backstepping control techniques, a nominal control input vN1is first designed for the position equation of the UAH with external unknown disturbances. Then, when the actuator faults and input saturation occur, the compensation control inputs vC1,vM1,and vL1are developed and added to the nominal controller vN1to reduce their effects on the system.
3.1. Position loop control
Without considering actuator LOE faults and input saturation constraints, the position equation involved ξ and τ in Eq. (5)can be written as

Define the tracking errors as

where ξdis the desired position trajectory, and τdis the designed virtual control law.
Invoking Eq.(6),the derivative of e1with respect to time is

Select an appropriate virtual control law τdas

where K1is the designed positive definite matrix.
By substituting Eq. (10) into Eq. (9), one has

Taking the time derivative of e2and invoking Eq.(6),it follows that

Here, the dynamic surface control technique is used to overcome the so-called explosion of complexity in the sequel steps, which is caused by the repeated derivation of. Let τdpass the following first-order filter ?223:

where ε2=diag{ε21,ε22,ε23}>0 is the time constant of the filter.
Define υ2=?2-τd. We obtain

Then, it gives

From Eqs. (12) and (13), the nominal control input is proposed as

It is noted that the proposed control law is discontinuous due to the introduction of sign function sign(e2), which may lead to the chattering effect and even make the system unstable in practice.In this work,in order to overcome this problem,a continuous function γ1(e2) is adopted to substitute for the function sign(e2), and then the nominal control input vacan be modified to vN1, which is given as10



where o1and c1are designed positive constants.
Substituting Eq. (17) into Eq. (12) yields


Differentiating Eq. (20) and invoking Eq. (11), Eqs. (18)and (19), one obtains
According to the ultimately uniformly bounded theorem19,we can draw a conclusion that the developed nominal controller (17) and adaptive update law (18) can make the output track the desired position trajectory. However, in addition to the external unknown disturbances which are together with system operation, the actuator faults and input constraints always occur in the running of the system in practice. In the following, we extend the above result to cope with the control input saturation and actuator LOE faults problems of the UAH system.
Based on the designed nominal controller vN1, compensation control inputs vC1, vM1, and vL1will be presented to restrain the adverse effects of the input saturation and actuator LOE faults.Hence, the final robust FTC input vaof the UAH position equation consists of four parts, namely,10

where

It is observed that the design process of virtual control law τdis same to the Eqs.(9)-(11).Then,in terms of Eqs.(5),(12)and (22), we obtain



where o2and c2are designed positive constants.

Differentiating Eq. (28) and invoking Eqs. (17), (18), (21),(22) and (26), one has
For the convenience of writing, we define
Invoking Eqs. (23)-(25), the following facts can be obtained:
According to the previous definition of vaand considering Eq. (22), we obtain G1Tmr=va=[vax,vay,vaz]T. Solving this algebraic equation, the desired attitude signals for the attitude loop control and the main rotor control input Tmrcan be created as follows based on the given yaw signal ψd32:
3.2. Attitude loop control
Similar to the design process of position loop controller, we first consider the nominal system with external unknown disturbances.Considering the UAH system(5),the attitude equation involved η and δ can be extracted as

The attitude angle error and angular rate error vectors are defined as

where ηdis the desired attitude trajectory,and δdcan be viewed as a virtual control law.

Considering Eqs. (29) and (30), it follows that
Invoking Eq.(36),the derivative of e3can be represented as

Similarly, let ηdpass the following first-order filter ?323:

where ε3=diag(ε31,ε32,ε33)>0 is the time constant of the filter.
Define υ3=?3-ηd. Then, we have
Then, it gives

Design the virtual control law δdas

where K3is the designed positive definite matrix.
By substituting Eq. (42) into Eq. (38), the following equation can be obtained:

Then taking the time derivative of (43) yields

Let δdpass the following first-order filter ?423:

where ε4=diag{ε41,ε42,ε43}>0 is the time constant of the filter.
Define υ4=?4-δd. Then, we have

Then, it gives

In the light of Eqs.(44)and(45),the nominal control input vbof attitude loop is developed as

Analogously,in order to reduce the chattering effect,a continuous function γ2(e4) is employed to take the place of the function sign(e4). Therefore, the nominal control input vbcan be revised to vN2, which is given as



where o3and c3are designed positive constants.Substituting Eq. (49) into Eq. (44) leads to


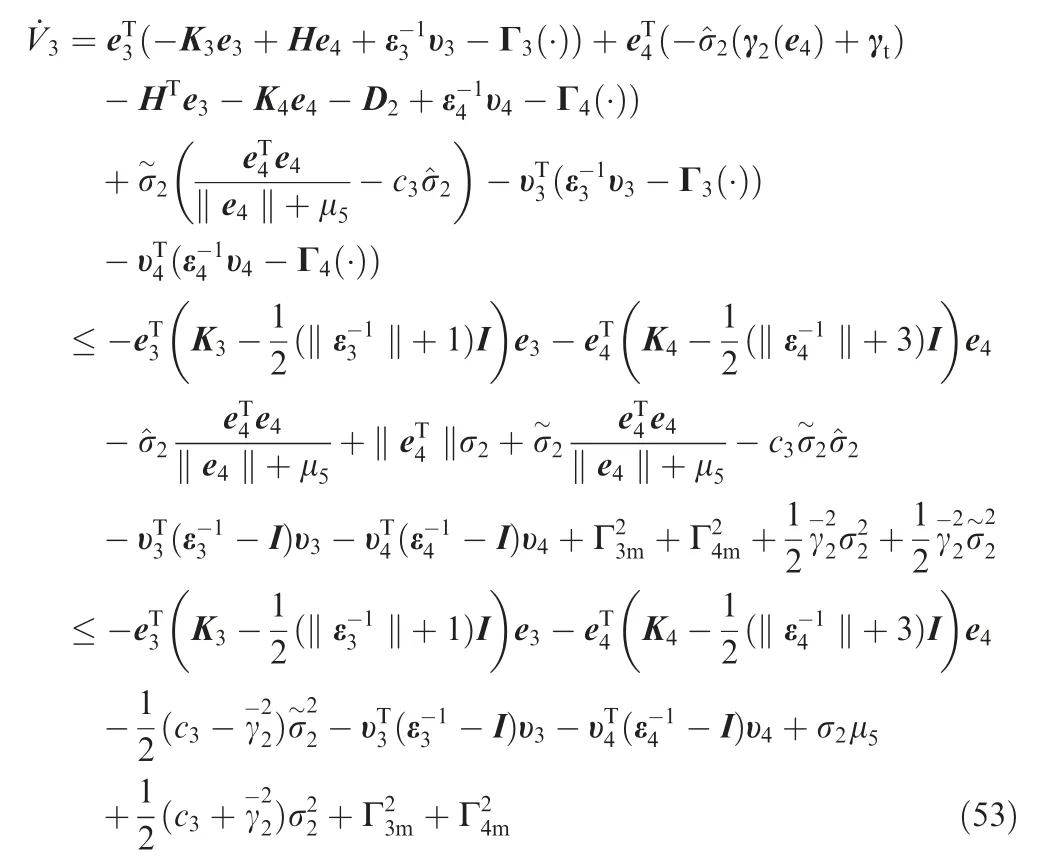
Taking the time derivative of V3obtains
Analogously, we can reach a decision that the desired attitude trajectory can be tracked on the basis of the presented nominal controller (49) and adaptive update law (50). Then,we will design the compensation control inputs vC2, vM2, and vL2for attitude loop control to improve the robustness and FTC capability of the UAH system.
Same to the previous analysis,the final robust FTC input vbof the UAH attitude equation with external unknown disturbances, actuator faults and input saturation also consists of four parts, i.e.,

where
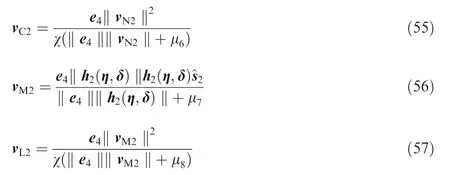
Invoking Eqs.(5)and(54),(44)can be rewritten as follows:



where o4and c4are designed positive constants.

Taking the time derivative of V4and invoking Eqs. (54)-(60), we have

3.3. Main results
Based on the above analysis, the main results can be summarized in the following theorem along with the control design process for the position and attitude trajectory tracking problems of the medium-scale UAH.
Theorem 1. Consider the 6-DOF nonlinear model of UAH system(5)with external unknown disturbances,actuator faults and input saturation.The parameter updating laws are chosen as Eqs. (18), (27), (50) and (59). Based on the robust adaptive FTC schemes Eqs. (22) and (54), the tracking error signals of the closed-loop system are ultimately uniformly bounded.
Proof. Define the Lyapunov function V5as follows:

Combining Eqs. (31) and (61), the time derivative of V5is
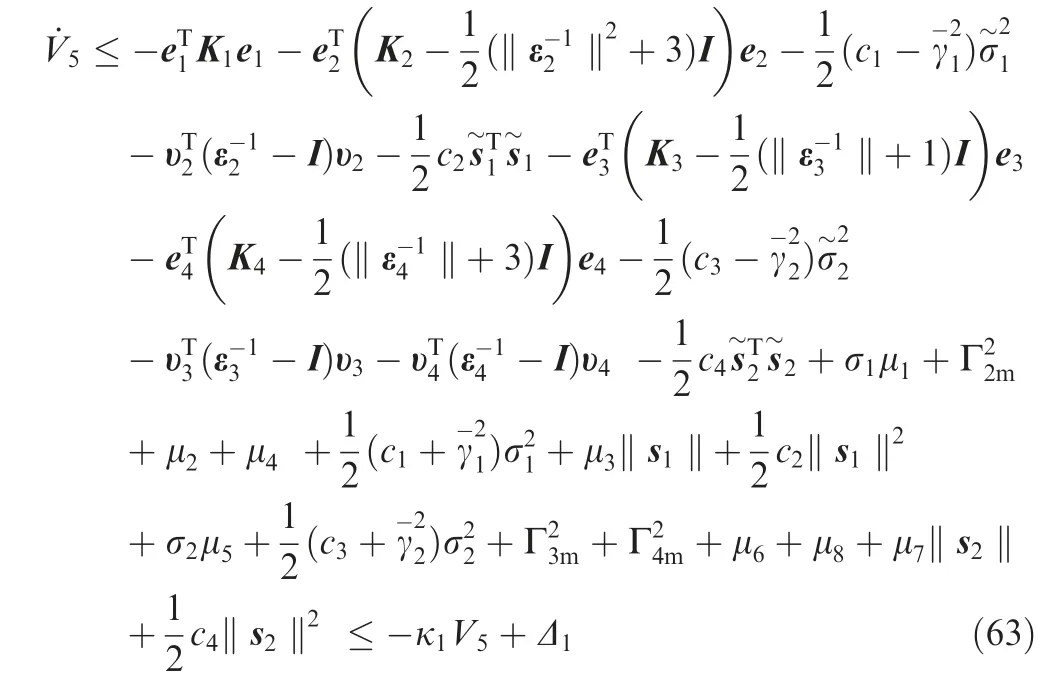
where
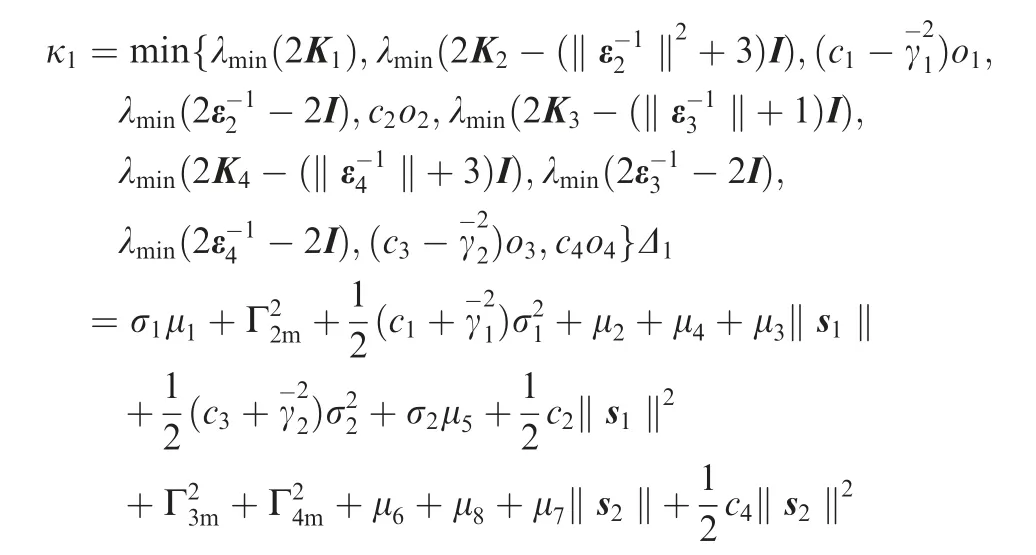
Integration of Eq. (63) yields

We can obtain from Eq.(64)that V5is bounded.According to the definition of V5, the following inequality is satisfied:
Remark 4. In this study, the inner-outer loop control technique is utilized to proceed with the control design. As well known, underactuation and strong coupling are the typical characteristics of the UAH system. By means of this control approach,the whole system is segmented into outer loop which is known as position loop and inner loop which is known as attitude loop to design the controller separately. In this way,the complexity of controller design is reduced and satisfactory tracking performance can be achieved only relying on three desired positions and a yaw angle information.
4. Simulation results
In order to test the disturbance rejection capability and FTC capability of the proposed robust adaptive compensation FTC scheme for the medium-scale UAH, the external unknown time-varying disturbances and unknown actuator fault signals are assumed as
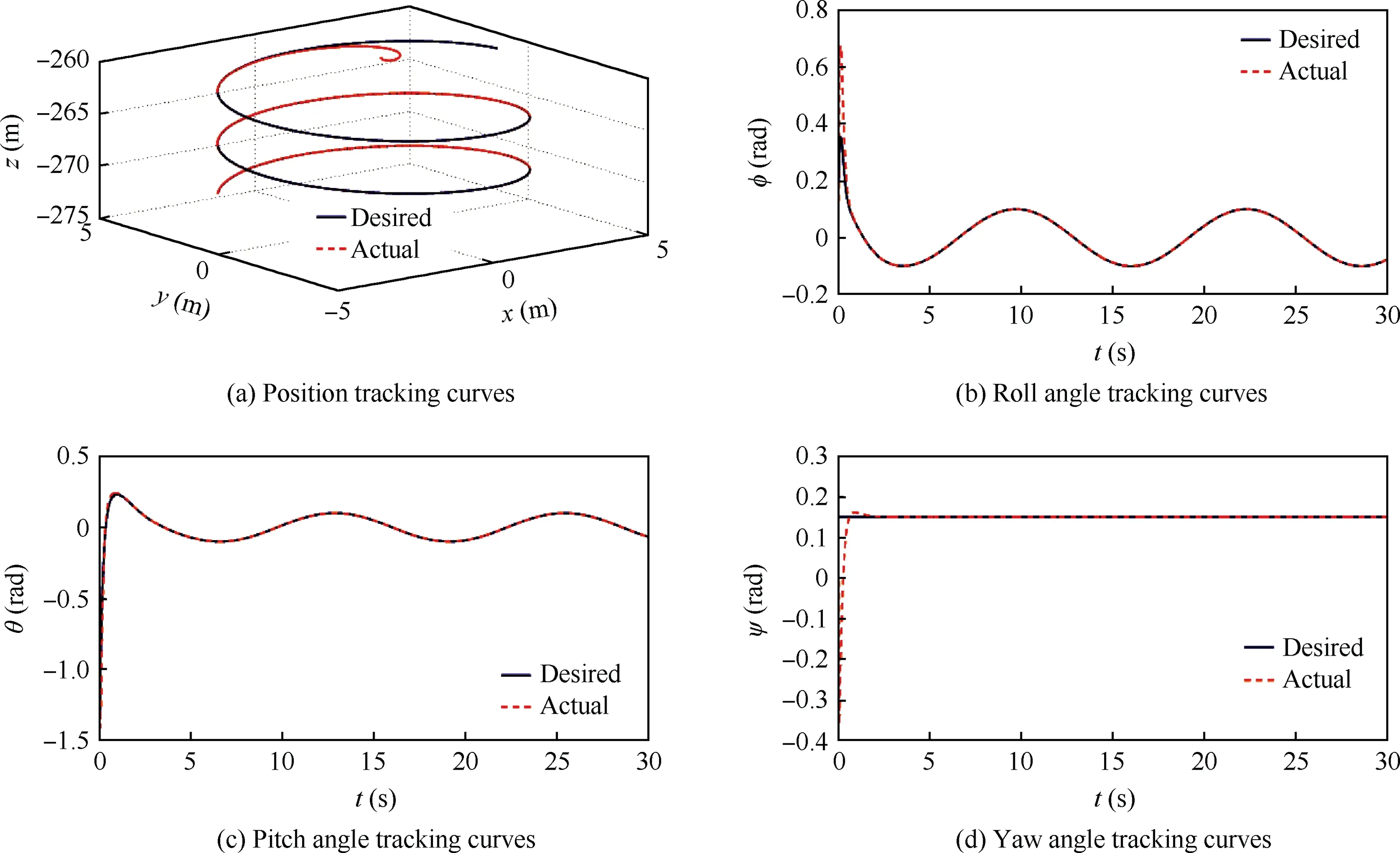
Fig. 1 Trajectory tracking results without external disturbances, actuator faults and input saturation.
In what follows, simulation results are divided into three cases to investigate the effectiveness of the presented robust FTC controller for the medium-scale UAH, where solid lines and dash lines define the desired trajectory and actual output responses, respectively.
4.1. Case 1. Trajectory tracking results with external disturbances
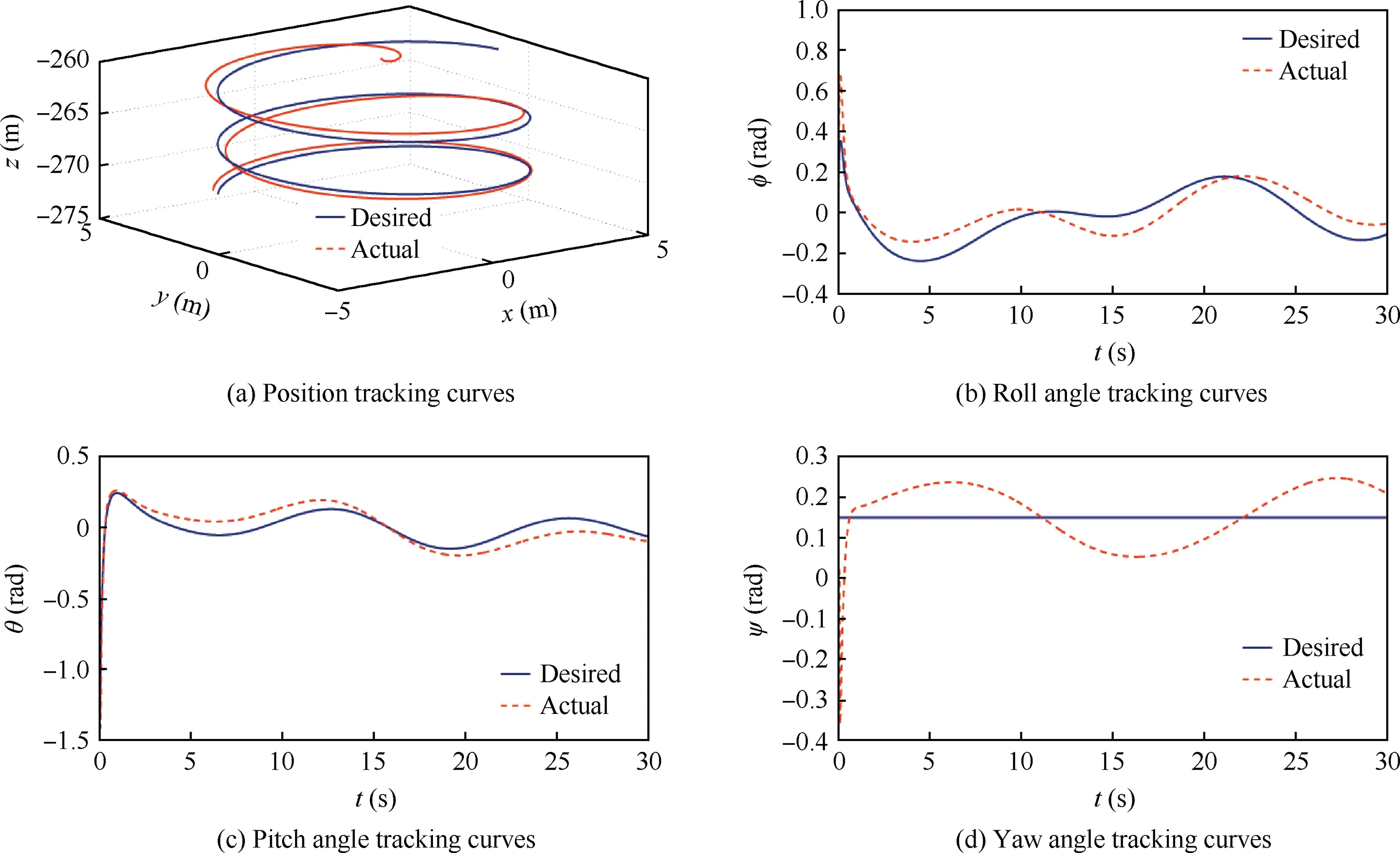
Fig. 2 Trajectory tracking results with external disturbances.
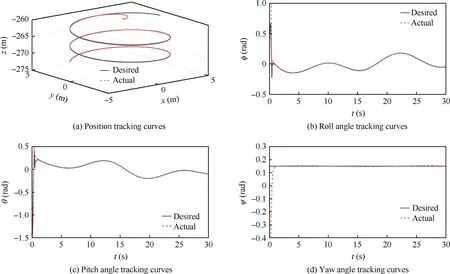
Fig. 3 Trajectory tracking results under nominal control input.
Firstly,without considering the external disturbances,actuator faults and input saturation,the tracking results of the position and attitude are shown in Fig.1.From Fig.1,we note that the tracking performance is satisfactory for the original system and the tracking error can converge to a boundary promptly.However, as shown in Fig. 2, when the external disturbances are taken into account, the actual output responses deviate from the desired trajectory without dealing with them. Therefore,it can be obtained that the external disturbances have an significant effect on the system stability and the robust control method needs be adopted to improve the disturbance rejection capability.
4.2. Case 2. Trajectory tracking results with external disturbances, actuator faults and input saturation

Fig. 4 Trajectory tracking results with external disturbances, actuator faults and input saturation.
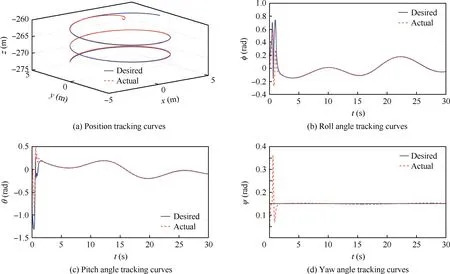
Fig. 5 Trajectory tracking results under robust adaptive compensation FTC scheme.
Secondly, For solving the disturbance rejection problem presented in Case 1, the robust control inputs vN1and vN2are acted on the nominal system and the simulation results are given as Fig. 3. Fig. 3 displays the effectiveness of the developed nominal control inputs, which can also guarantee the tracking error convergence. However, the aforementioned analysis are all based on the healthy case of actuators. Moreover, the control input saturation is not considered as well.When the external disturbances, actuator faults and input saturation are taken into consideration simultaneously,as shown in Fig. 4, the satisfactory tracking performance cannot be ensured only depend on the nominal robust control inputs vN1and vN2. Fig. 4 indicates that when the actuator faults are introduced at 16 second,the tracking errors of the attitude angle begin to get larger and the altitude of the UAH even starts to change in the opposite direction after a period of time.Hence, based on the compensation control theory, the robust FTC control inputs vaand vbare proposed to cope with the adverse effects of external disturbances, actuator faults and input saturation.
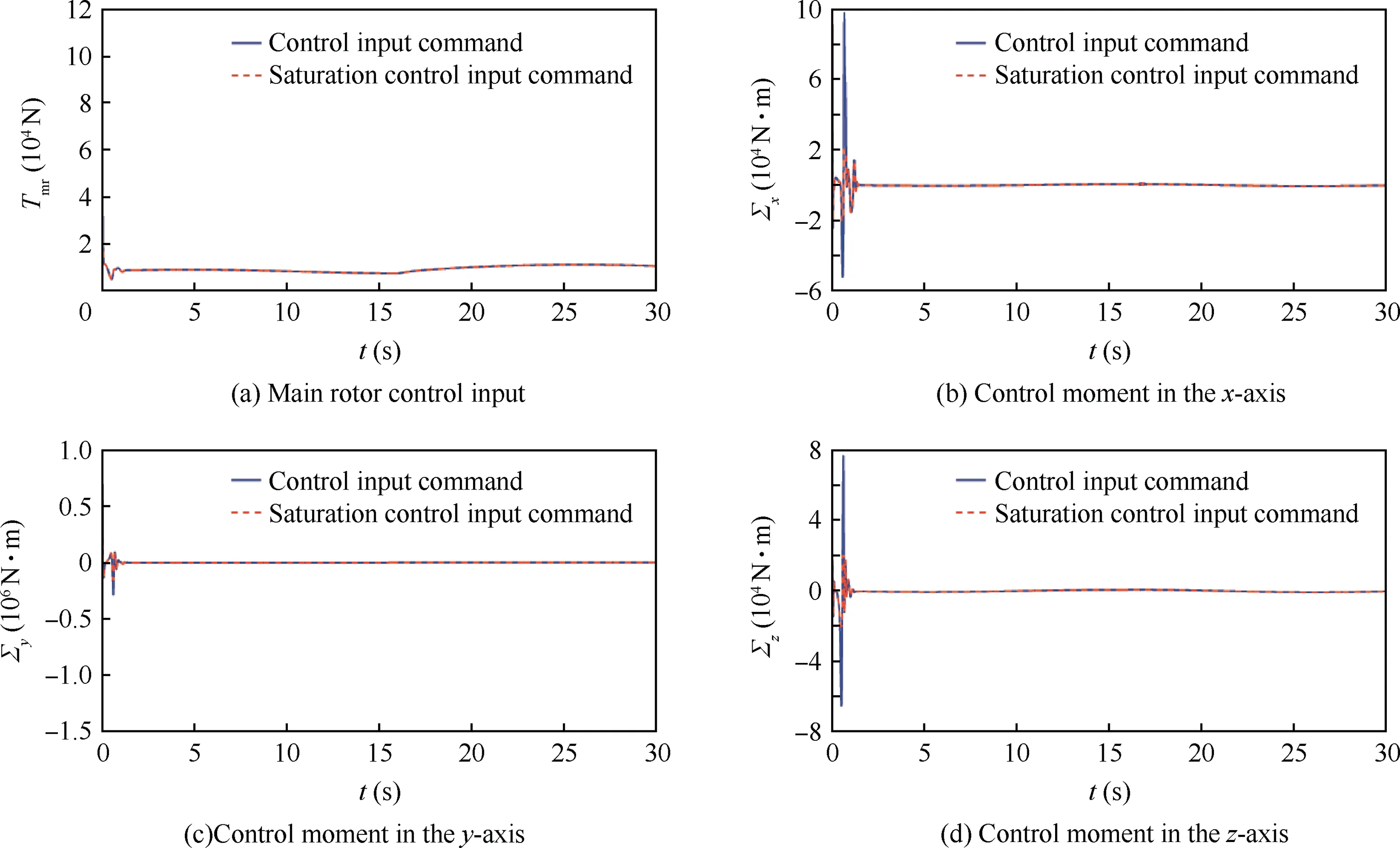
Fig. 6 Actual control input curves.
4.3. Case 3. Trajectory tracking results under robust adaptive compensation FTC scheme
Finally, Fig. 5 is given to demonstrate the effectiveness of the designed robust adaptive compensation FTC scheme.It can be seen from Fig. 5 that the tracking errors are bounded and can converge to a boundary which can be adjusted rapidly. Furthermore, Fig. 6 reveals the control input command is bounded and convergent.In turn,it implies that the input saturation issue is handled by means of the designed robust adaptive compensation FTC strategy.
Based on the above simulation results, we can arrive at a conclusion that the presented robust adaptive compensation FTC control method is valid for the medium-scale UAH with external unknown disturbances, actuator faults and input saturation.
5. Conclusions
This study has developed a robust adaptive compensation FTC scheme for the medium-scale UAH to obtain satisfactory tracking performance, subjected to external unknown disturbances,actuator faults and input saturation.The 6-DOF nonlinear model of the medium-scale UAH has been established.For the actuator healthy case,the adaptive control technology has been employed to approximate the upper bound of the external disturbances and the nominal controller has been designed to guarantee the stability of overall system.By utilizing the compensation control theory,an adaptive FTC scheme has been proposed for the faulty UAH system with input saturation.Based on Lyapunov theory,the stability of the closedloop control system has been proven. Simulation results have been given to demonstrate the effectiveness of the developed robust FTC method. In our future work, the novel FTC approach to solve the issues of stuck fault and even multiple faults will be further explored for the medium-scale UAH.
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China (Nos. 61825302, 61573184), in part by the Jiangsu Natural Science Foundation of China(No. BK20171417), and in part by the Aeronautical Science Foundation of China (No. 20165752049).
 CHINESE JOURNAL OF AERONAUTICS2019年10期
CHINESE JOURNAL OF AERONAUTICS2019年10期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Design and analysis of a hypersonic inlet with an integrated bump/forebody
- Experimental study of effect of post processing on fracture toughness and fatigue crack growth performance of selective laser melting Ti-6Al-4V
- Efficient and accurate online estimation algorithm for zero-effort-miss and time-to-go based on data driven method
- Experimental and numerical investigation of threedimensional vortex structures of a pitching airfoil at a transitional Reynolds number
- A methodology for simulating 2D shock-induced dynamic stall at flight test-based fluctuating freestream
- Flight strategy optimization for high-altitude long-endurance solar-powered aircraft based on Gauss pseudo-spectral method