撲翼機(jī)自穩(wěn)飛控系統(tǒng)的模型構(gòu)建與仿真研究*
2019-12-07 05:31:26王唱趙華
科技與創(chuàng)新 2019年22期
關(guān)鍵詞:模型
王唱,趙華
撲翼機(jī)自穩(wěn)飛控系統(tǒng)的模型構(gòu)建與仿真研究*
王唱,趙華
(沈陽(yáng)航空航天大學(xué),遼寧 沈陽(yáng) 110136)
主要對(duì)撲翼機(jī)的自穩(wěn)飛行控制系統(tǒng)進(jìn)行了分析,從而構(gòu)建模型并進(jìn)行仿真研究。以鳥(niǎo)類(lèi)撲翼飛行運(yùn)動(dòng)為研究對(duì)象,以撲動(dòng)飛行過(guò)程中的機(jī)械結(jié)構(gòu)為基礎(chǔ),逐步建立二維和三維運(yùn)動(dòng)方程,結(jié)合自動(dòng)控制工程原理、高等微積分、復(fù)變函數(shù)等基礎(chǔ)原理,對(duì)復(fù)雜的參量輸入數(shù)據(jù)進(jìn)行多項(xiàng)變換和簡(jiǎn)化處理,從而轉(zhuǎn)化為可控性高、可視化效果好的信號(hào)輸出。結(jié)合具體算法使用matlab軟件進(jìn)行優(yōu)化處理,更好地對(duì)模型自穩(wěn)系統(tǒng)做仿真數(shù)據(jù)分析。
撲翼機(jī);自穩(wěn)控制;航空航天技術(shù);飛行事業(yè)
隨著近現(xiàn)代的飛行事業(yè)和航空航天技術(shù)的迅猛發(fā)展,撲翼飛行器作為一種獨(dú)具特色的飛行器,通過(guò)仿生學(xué)的研究和空氣動(dòng)力學(xué)的實(shí)踐證實(shí),具有比旋翼飛行器和固定翼更高效、更穩(wěn)定、更安全的飛行優(yōu)勢(shì)。
1 系統(tǒng)結(jié)構(gòu)的分析與建模
撲翼飛行器除了能進(jìn)行一般飛行器的升降、俯仰、偏航的空間六自由度獨(dú)立運(yùn)動(dòng)外,還有對(duì)稱(chēng)撲動(dòng)和自穩(wěn)控制,提高了研究?jī)?nèi)容的挑戰(zhàn)性。智能化的撲翼機(jī)與四旋翼飛行器相比,在自穩(wěn)性控制系統(tǒng)方面的研究亟待提高。
1.1 飛控系統(tǒng)的主要模塊及功能
飛控系統(tǒng)硬件部分主要有陀螺儀(用于檢測(cè)飛行姿態(tài))、加速計(jì)(用于檢測(cè)飛行姿態(tài))、地磁感應(yīng)飛控、氣壓傳感器(用于控制懸停高度)、超聲波傳感器(可以在低空時(shí)高度精確控制或自動(dòng)避障)、光流傳感器(用于懸停水平位置精確確定)、GPS模塊(用于水平位置高度粗略定位)以及控制電路(包括濾波電路等,進(jìn)行信息處理和反饋等)。通過(guò)以上模塊的綜合作用,達(dá)到一定范圍內(nèi)自動(dòng)保持正常飛行姿態(tài)的要求。
1.2 結(jié)構(gòu)分析與三維建模
對(duì)仿鳥(niǎo)類(lèi)撲翼飛行器的驅(qū)動(dòng)機(jī)構(gòu)、撲翼結(jié)構(gòu)及尾翼結(jié)構(gòu)進(jìn)行了初步設(shè)計(jì),對(duì)撲翼機(jī)翅膀的撲動(dòng)進(jìn)行仿生學(xué)和運(yùn)動(dòng)學(xué)分析,采用雙曲柄搖桿結(jié)構(gòu)將翅膀的轉(zhuǎn)動(dòng)轉(zhuǎn)化為撲動(dòng),尾翼處用標(biāo)準(zhǔn)舵機(jī)控制舵面,采用三舵機(jī)聯(lián)合驅(qū)動(dòng)機(jī)構(gòu)(包括聯(lián)動(dòng)搖桿),矯正并控制飛行姿態(tài),從而實(shí)現(xiàn)空間六自由度運(yùn)動(dòng)完成撲翼機(jī)的俯仰、滾轉(zhuǎn)、偏航等飛行形式。
采用Solidworks三維繪圖軟件,對(duì)飛行器內(nèi)部的機(jī)械和電子部分結(jié)構(gòu)進(jìn)行設(shè)計(jì)、建模和渲染,如圖1所示。
以撲翼機(jī)構(gòu)與可變后掠翼機(jī)構(gòu)中的對(duì)稱(chēng)結(jié)構(gòu)為模型焦點(diǎn),將雙搖桿機(jī)構(gòu)拓展為一般性的統(tǒng)一立體,其中通過(guò)平面連桿機(jī)構(gòu)基本方程建立搖桿同步性能的優(yōu)化設(shè)計(jì)數(shù)學(xué)模型,引入搖桿轉(zhuǎn)角偏差小量假設(shè)和極限位置對(duì)稱(chēng)性假設(shè),利用泰勒展開(kāi)公式,求解出最優(yōu)設(shè)計(jì)變量的理論關(guān)系式,結(jié)合大量的機(jī)構(gòu)仿真試驗(yàn)研究,借助數(shù)學(xué)物理方法得到近似經(jīng)驗(yàn)公式與設(shè)計(jì)曲線圖,從而解決單曲柄雙搖桿機(jī)構(gòu)同步性能優(yōu)化問(wèn)題,同時(shí)間接驗(yàn)證了該模型分析法的工程實(shí)用性。
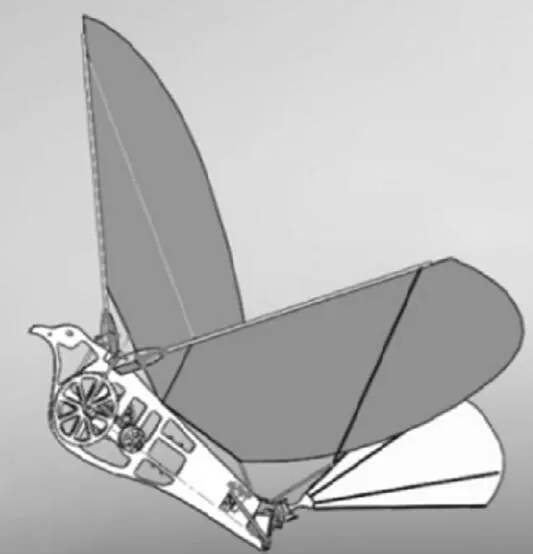
圖1 撲翼機(jī)三維模型
利用Solidworks建模,采用高分辨率對(duì)撲翼動(dòng)作進(jìn)行分析,如圖2所示,撲翼機(jī)模擬飛行對(duì)稱(chēng)性能良好。
2 算法融合與控制反饋
通過(guò)對(duì)三軸加速度和角速度的檢測(cè),將采集到的數(shù)據(jù)進(jìn)行算法融合處理,產(chǎn)生輸出信號(hào),作用于控制端的執(zhí)行元件,借助控制系統(tǒng)和電調(diào)的綜合作用,實(shí)現(xiàn)對(duì)中心電機(jī)的速度控制和尾部舵機(jī)運(yùn)動(dòng)的角度控制。在數(shù)據(jù)處理和運(yùn)動(dòng)作用的過(guò)程中,算法采用兩次融合負(fù)反饋調(diào)節(jié)的理論及方法,將其進(jìn)行反饋處理,使實(shí)際中的調(diào)節(jié)控制有更好的穩(wěn)定性、精確性和可靠性。在處理各個(gè)傳感器的數(shù)據(jù)時(shí),不宜單獨(dú)分析,因?yàn)槠渲幸恍?shù)據(jù)會(huì)相互影響,不滿(mǎn)足獨(dú)立性原則,所以需要進(jìn)行科學(xué)的融合。將撲翼機(jī)中的加速度計(jì)和陀螺儀采集的數(shù)據(jù)進(jìn)行融合處理,可極大地避免出現(xiàn)測(cè)量姿態(tài)角度的漂移,避免造成系統(tǒng)誤差。
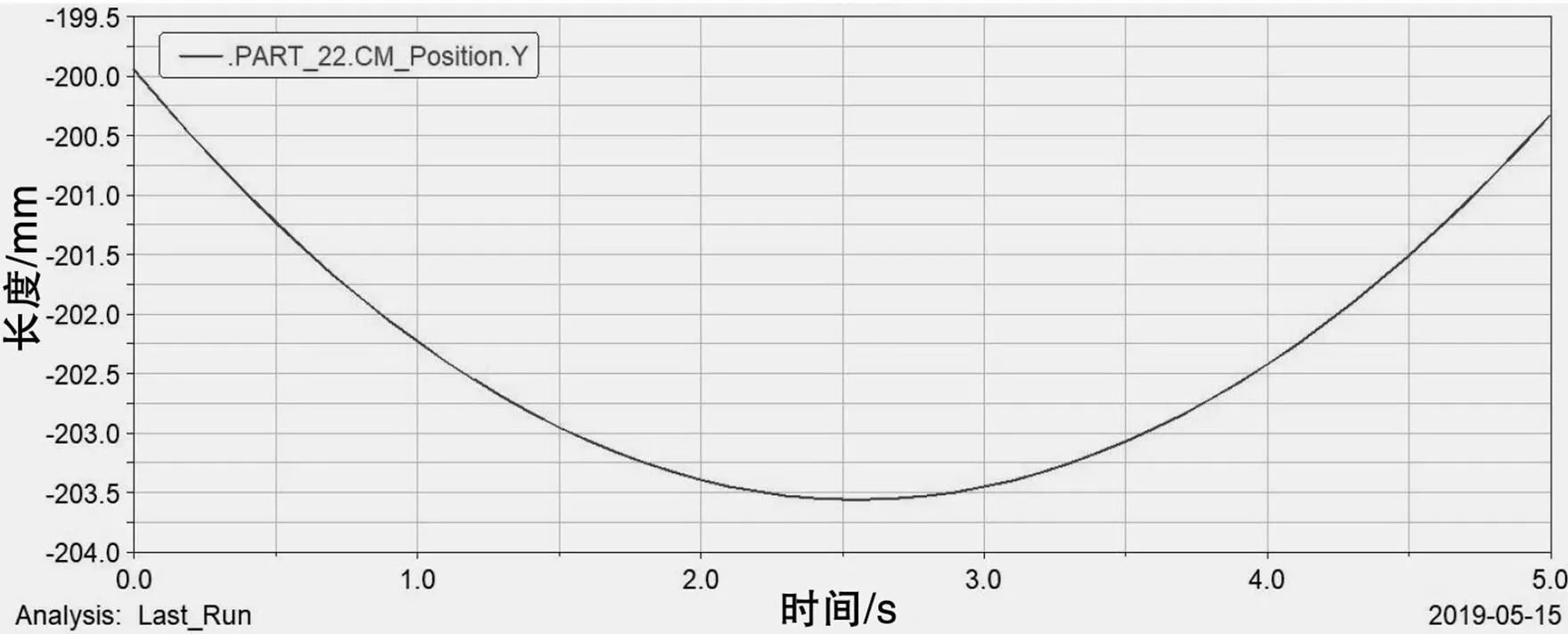
圖2 撲翼動(dòng)作分析
2.1 信息采集和預(yù)處理
在撲翼機(jī)的機(jī)翼兩側(cè)安裝加速度計(jì),質(zhì)心位置安裝陀螺儀,用于檢測(cè)撲翼飛行器的運(yùn)動(dòng)參數(shù)。以單曲柄雙搖桿撲動(dòng)機(jī)構(gòu)為研究對(duì)象,優(yōu)化了驅(qū)動(dòng)機(jī)構(gòu)在一個(gè)周期內(nèi)運(yùn)動(dòng)的加速度、角速度和撲翼角的不對(duì)稱(chēng)性,同時(shí)采用雙連桿數(shù)字舵機(jī)來(lái)控制撲翼機(jī)在俯仰、偏航和滾轉(zhuǎn)時(shí)的飛行姿態(tài)。
預(yù)處理中采用微電控制器,即單片機(jī)的升級(jí)版DSP器件,包含加速度計(jì)和陀螺儀在內(nèi)的傳感器,它的體積小、質(zhì)量輕、價(jià)格便宜,使用方便,控制相對(duì)較容易,使信息處理趨于數(shù)字化、微型化、智能化。
2.2 自穩(wěn)控制系統(tǒng)模型
撲翼飛行器的自穩(wěn)控制系統(tǒng)模型是基于自主反饋原理建立的。
反饋系統(tǒng)結(jié)構(gòu)流程如圖3所示,為了提高控制精度,在控制系統(tǒng)中增加了與干擾有關(guān)的修正函數(shù)(),其中1()和3()為舵機(jī)信號(hào)輸入,2()為電機(jī)驅(qū)動(dòng)輸入,1(),1(),1(),1()分別為其對(duì)應(yīng)的前向通道的傳遞函數(shù)、象函數(shù)、偏差象函數(shù)、反饋通道傳遞函數(shù)。

圖3 反饋系統(tǒng)結(jié)構(gòu)流程圖
用微積分方程和差分方程來(lái)描述該系統(tǒng)的運(yùn)動(dòng),按照經(jīng)典控制理論逆序分析,系統(tǒng)響應(yīng)只取決于輸入信號(hào)的形態(tài)和系統(tǒng)的特性,而與輸入施加的時(shí)間無(wú)關(guān),即消除了包括采樣時(shí)間等在內(nèi)的累積誤差。當(dāng)系統(tǒng)在外力作用下,輸出結(jié)果逐漸與期望值一致,則系統(tǒng)穩(wěn)定,可以按照工程上常用的“快準(zhǔn)穩(wěn)”指標(biāo)方法進(jìn)行系統(tǒng)的評(píng)價(jià),但是由于同一個(gè)系統(tǒng)的快、準(zhǔn)、穩(wěn)的要求有一定的制約,只能不斷進(jìn)行優(yōu)化,況且飛行無(wú)小事,任何紕漏都可能會(huì)造成不可預(yù)料的損失,所以系統(tǒng)對(duì)快、準(zhǔn)、穩(wěn)的要求應(yīng)該相當(dāng)重視,達(dá)到足夠好的動(dòng)態(tài)特性。
單個(gè)傳感器數(shù)據(jù)采集完畢后,將多個(gè)傳感器采集到的數(shù)據(jù)按照一定級(jí)別進(jìn)行處理,將加速計(jì)和陀螺儀結(jié)合,產(chǎn)生新的信息形式,在很大限度上減小其他因素(如機(jī)械振動(dòng)、測(cè)量時(shí)間、溫度等)造成的不必要誤差,具體分析如下。
對(duì)兩個(gè)加速計(jì)采用濾波算法除去短時(shí)性快速變化的信號(hào),保留長(zhǎng)時(shí)性緩慢變化的信號(hào),運(yùn)用低通濾波算法。通常給變化較快的信號(hào)乘上一個(gè)較小的權(quán)重系數(shù)1=2,以削弱突變信號(hào)對(duì)整體產(chǎn)生的影響。應(yīng)用高通濾波方法處理陀螺儀數(shù)據(jù),輔以權(quán)重比例系數(shù)3,一方面抑制陀螺儀積分的漂移;另一方面將兩部分組成互補(bǔ)濾波器,進(jìn)一步優(yōu)化。其濾波系數(shù)和為1+3=1,所以得到的濾波結(jié)果是一個(gè)較精確的線性角度值。

對(duì)于尾部小舵機(jī)部分,兩個(gè)舵機(jī)分別控制飛行的俯仰、橫滾等姿態(tài),在較短時(shí)間內(nèi)輸出轉(zhuǎn)動(dòng)角度,則有:
參數(shù)積分關(guān)系如圖4所示。

該模型主要是將撲翼機(jī)的復(fù)雜運(yùn)動(dòng)以比率和微積分的形式簡(jiǎn)化,結(jié)合線性定常系統(tǒng)的特點(diǎn),綜合多個(gè)傳感器的同步并行測(cè)試,進(jìn)行線性疊加處理,使其結(jié)果轉(zhuǎn)化為線性微分方程的控制運(yùn)算。以正向研究為主,將輔助反饋?zhàn)鳛榉聪蛲ǖ溃M(jìn)行穩(wěn)定性的控制,調(diào)整參數(shù)變量,將各個(gè)模擬的數(shù)據(jù)導(dǎo)入運(yùn)算中,得到初始參數(shù)的具體值,以量變?yōu)橹鳎鸩奖平鼉?yōu)化結(jié)果,直至達(dá)到預(yù)定允許范圍的值。
圖4 參數(shù)積分關(guān)系
3 Simulink仿真研究
3.1 系統(tǒng)模型建立
用建模仿真軟件matlab/simulink快速進(jìn)行參數(shù)化的建模與數(shù)據(jù)分析,極大地簡(jiǎn)化了復(fù)雜信號(hào)的處理,在給定參數(shù)條件下,仿真出運(yùn)行結(jié)果的真實(shí)狀況。根據(jù)撲翼飛行的仿生條件,導(dǎo)出機(jī)架安裝角與撲翼?yè)鋭?dòng)幅角、曲柄驅(qū)動(dòng)參數(shù)的運(yùn)動(dòng)方程,利用matlab進(jìn)行求解計(jì)算,從而確定驅(qū)動(dòng)機(jī)構(gòu)各桿長(zhǎng)的最優(yōu)設(shè)計(jì),對(duì)數(shù)據(jù)進(jìn)行有效處理,產(chǎn)生可控性高、可視化效果好的信號(hào)輸出。
建立和調(diào)用matlab中工具箱的Flight Simulation Model模塊,專(zhuān)門(mén)對(duì)撲翼飛行器飛行任務(wù)和狀態(tài)進(jìn)行模型的建立和數(shù)據(jù)的分析,如圖5所示。
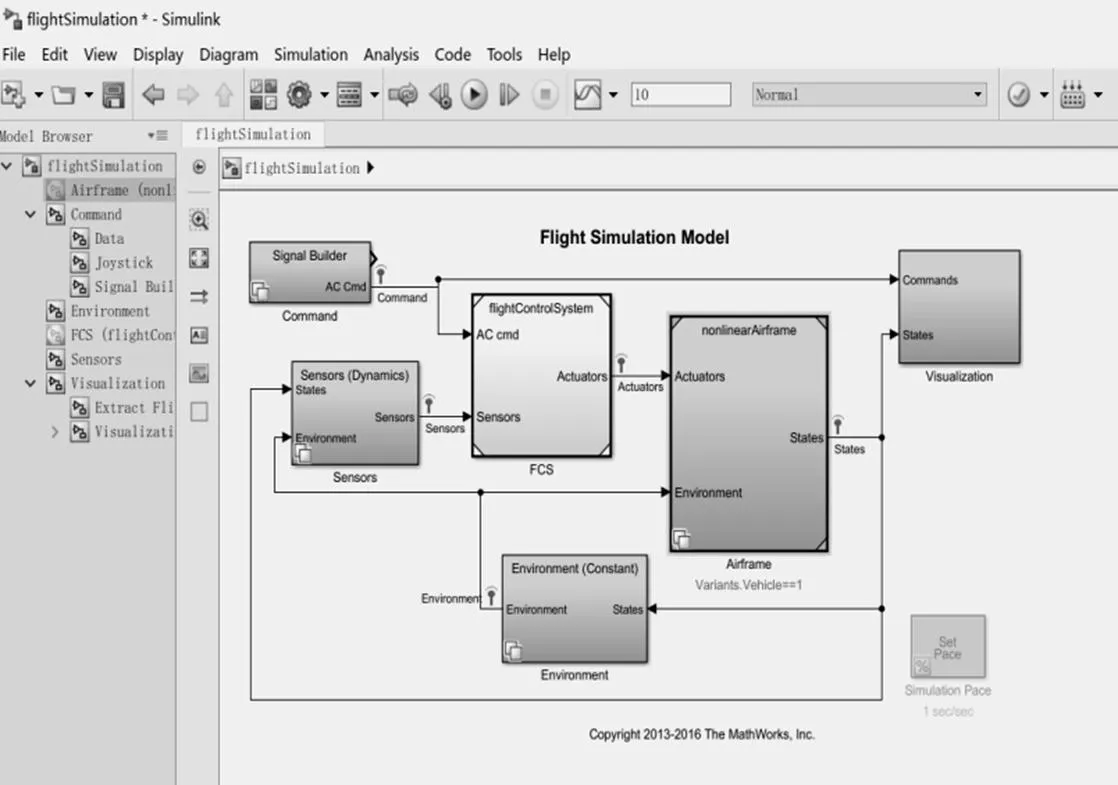
圖5 matlab 系統(tǒng)模型
對(duì)各個(gè)模塊元件(比如陀螺儀、加速計(jì)、地磁感應(yīng)、氣壓傳感器、超聲波傳感器、光流傳感器、GPS模塊)分別分析數(shù)據(jù)結(jié)構(gòu),建立完整控制流程,最終達(dá)到并實(shí)現(xiàn)整個(gè)過(guò)程的自動(dòng)化、智能化。
3.2 參數(shù)化設(shè)計(jì)與仿真處理
由大量的數(shù)據(jù)仿真分析和模型的規(guī)則細(xì)化,演繹類(lèi)比氣動(dòng)力學(xué)相關(guān)公式,可以推理得出模型的速度公式,即飛行過(guò)程中的理論速度檢驗(yàn)公式:

式(1)中:f,f,q,,d分別為綜合阻力系數(shù)、無(wú)刷電機(jī)驅(qū)動(dòng)力(主動(dòng)力)、伺服電機(jī)(舵機(jī))驅(qū)動(dòng)力、等效撲動(dòng)迎風(fēng)面積、空氣阻力系數(shù)。
當(dāng)輸入的單軸加速度為以特定頻率震蕩的線性規(guī)律變化時(shí),利用matlab/simulink實(shí)現(xiàn)的部分仿真分析(理想狀況下)相應(yīng)的變化響應(yīng)曲線,如圖6所示。

圖6 變化響應(yīng)曲線
4 結(jié)束語(yǔ)
隨著無(wú)人飛行器的迅猛發(fā)展,對(duì)飛行器控制算法的要求越來(lái)越高,目前仍有欠缺的控制算法無(wú)法解決在擾動(dòng)影響的情況下,飛行器姿態(tài)穩(wěn)定性控制系統(tǒng)的多參數(shù)優(yōu)化控制問(wèn)題。本文以單曲柄雙搖桿撲動(dòng)機(jī)構(gòu)為研究對(duì)象,在保證驅(qū)動(dòng)機(jī)構(gòu)優(yōu)化的前提下,進(jìn)行自穩(wěn)性飛控系統(tǒng)模型的建立和研究,系統(tǒng)總體將傳入的三軸數(shù)據(jù)進(jìn)行高通濾波分析和穩(wěn)態(tài)處理,消除多種干擾和噪聲,將模型進(jìn)行最大限度的簡(jiǎn)化,使用自動(dòng)控制PID調(diào)節(jié),將比例、積分和微分環(huán)節(jié)與速度,角速度,角加速度和角度融入其中,減少了穩(wěn)態(tài)誤差和超調(diào)趨勢(shì),效果良好。
[1]徐兵,朱偉平.基于四桿機(jī)構(gòu)的撲翼驅(qū)動(dòng)機(jī)構(gòu)設(shè)計(jì)和運(yùn)動(dòng)仿真[J].重慶科技學(xué)院學(xué)報(bào)(自然科學(xué)版),2017,19(5):63-66.
[2]修星晨,朱洪俊,謝鐸,等.基于MATLAB與ADAMS對(duì)撲翼機(jī)構(gòu)優(yōu)化仿真分析[J].機(jī)械設(shè)計(jì)與制造,2017(Suppl 1):153-156.
[3]賀威,丁施強(qiáng),孫長(zhǎng)銀.撲翼飛行器的建模與控制研究進(jìn)展[J].自動(dòng)化學(xué)報(bào),2017,43(5):685-696.
[4]雷亞超.仿蝴蝶微型撲翼機(jī)飛行原理及撲翼機(jī)構(gòu)研究[D].南昌:南昌航空大學(xué),2013.
[5]謝友增.仿生驅(qū)鳥(niǎo)撲翼機(jī)結(jié)構(gòu)設(shè)計(jì)及氣動(dòng)力分析[D].天津:中國(guó)民航大學(xué),2015.
2095-6835(2019)22-0042-03
V267
A
10.15913/j.cnki.kjycx.2019.22.011
王唱(1997—),男,本科在讀,主要研究方向?yàn)闄C(jī)器人。趙華(1983—),女,講師,主要研究方向?yàn)楫a(chǎn)品設(shè)計(jì)。
遼寧省大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練項(xiàng)目(編號(hào):110418192)
〔編輯:張思楠〕
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19