非包圍式永磁吸附爬管機器人機構研究
2019-12-05 02:56:56何富君張青源郭崗崗張雨婷
制造業自動化 2019年11期
何富君,張青源,劉 凱,郭崗崗,張雨婷
(東北石油大學 機械科學與工程學院,大慶 163318)
0 引言
石油、化工行業中存在大量輸送高溫、高壓、有毒介質的管線,橋梁建筑等行業中也存在大量的管架、管狀拉索,這些管線、管架需要定期的檢修維護。通常是由人工完成,存在高空作業、環境惡劣、效率低、誤差大、成本高等問題[1~3]。迫切需要研發出能夠攀爬各種管架并可以攜帶專業工具的爬行機器人代替人工作業。
隨著“中國制造2025”規劃的提出,機器人技術成為重大的研究方向,其中管壁爬行機器人作為機器人技術的細分領域得到了世界各國的關注。上世紀六七十年代,世界上一些科研機構和高校開始對管壁爬行機器人進行研究,直到現在已經研究出了各式各樣的管、壁爬行機器人[4~10]。比較典型的三種吸附爬行方式如圖1所示。圖1(a)為伊朗德黑蘭大學設計的路燈清潔機器人,該機器人為典型的環抱式爬管機器人[7]。圖1(b)為哈工大研發的一款永磁吸附履帶式爬壁機器人,其履帶吸附爬行方式可用于爬管機器人[6]。圖1(c)為東北石油大學研發的一款基于自重鎖緊式爬管機器人,抱緊力能夠隨載荷自適應變化[1],構思新穎獨特。上述爬管機器人適應的管徑變化較小,本文研究了一種適應性更強的爬管機器人。
1 爬管機器人方案研究
1.1 構型分析

圖1 管、壁爬行機器人
機器人在管上爬行應具備足夠的附著能力和靈活的移動能力,而兩者又是一對矛盾體,平衡好這兩者之間的關系是爬管機器人設計的關鍵[1]。常見的機器人爬行方式有輪式、履帶式、足式、仿生式等[1~7]。輪式移動速度快,控制簡單靈活,但附著性能和越障性能差;履帶式附著性能好,對壁面適應能力強,但運動不靈活,且不適合小管徑;足式越障性能好,但結構復雜速度慢,且控制復雜[4~6]。按附著方式分類,爬管機器人可分為機械抱緊式、自重鎖緊式和仿生式;爬壁機器人則分為磁力吸附式、負壓吸附式和仿生吸附式[9,10]。全包圍結構的爬管機器人適合爬行直徑較小的管道,且適應管道直徑變化的能力有限,否則機器人尺寸過大。采用永磁吸附可減少對電力的依賴,可靠性高,結構簡單。由于管道長度通常較長,應采用輪式運動結構增強運動能力。
為適應在直徑200mm~1000mm的管道上爬行,結合所爬管道具有鐵磁性的特點,本文研制一種具有磁力可調功能的多管徑爬行機器人。機器人采用永磁吸附,為了適應各種管道在不同位姿下的爬行且保持運動的靈活性,機器人的吸附力需要動態可調。機器人采用非包圍式抱緊結構,利用四條輪臂驅動,具有較強的避障能力。四條輪臂采用四連桿機構支撐,可動態張合,適應不同的管徑變化,大大提高機器人的適應能力,應用范圍更廣。
1.2 結構設計
對爬管機器人本體機構進行了設計,結構如圖2所示。機器人整體包含四個輪臂模塊、兩個獨立的吸附模塊。輪臂模塊通過拉桿與絲桿機構連接形成具有輪臂張角調節功能的四連桿機構,可以適應不同直徑的管道,保證每個驅動輪與壁面緊密貼合,爬行管徑范圍可以達到200mm~1000mm。
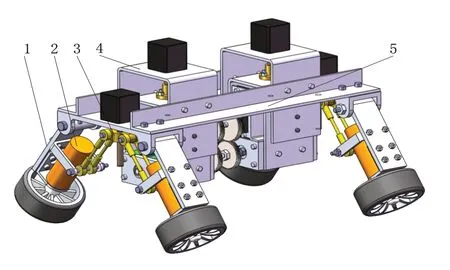
圖2 機器人整體結構
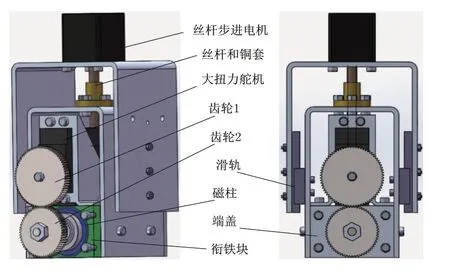
圖3 吸附模塊示意圖
吸附模塊如圖3所示,每個吸附模塊都可以單獨控制,通過控制上面的絲桿步進電機調節吸附模塊距離壁面的距離,進而調節磁吸附力,在遇到小凸起障礙時也可以實現避障,同時也可以通過改變吸附模塊內部圓柱形磁體旋轉的角度來調節永磁吸附力的大小。四輪臂機構和吸附機構通過主體架連接,對管壁形成了非包圍式吸附抱緊效果,適用范圍較大。主架結構和部分零部件采用鋁合金材料,既可減輕重量又可去除對吸附機構的磁力影響。每個輪臂上安裝有可測速的直流減速電機,實現反饋控制,保證穩定爬行。爬行吸附示意圖如圖4、圖5所示。
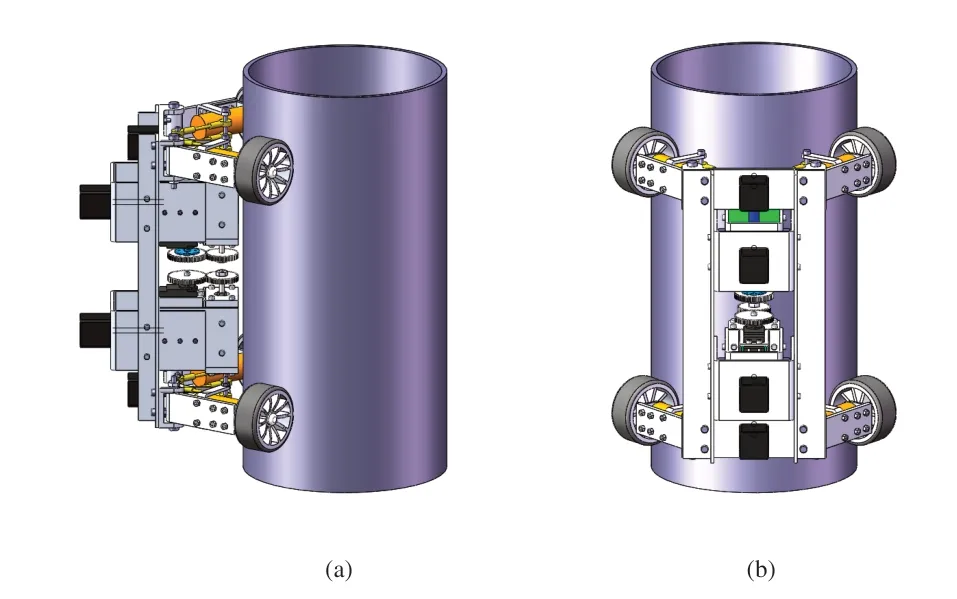
圖4 豎直吸附爬行狀態
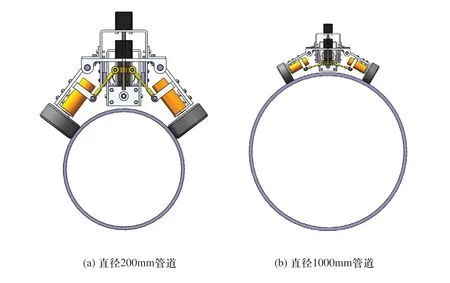
圖5 不同直徑管道的吸附狀態
1.3 機器人豎直爬行受力分析
機器人爬行狀態有豎直管爬行、水平管爬行和傾斜管爬行,其中豎直爬行狀態時需要的吸附力最大,本文以豎直管爬行為例進行受力分析。圖6、圖7為機器人豎直爬行的受力示意圖。
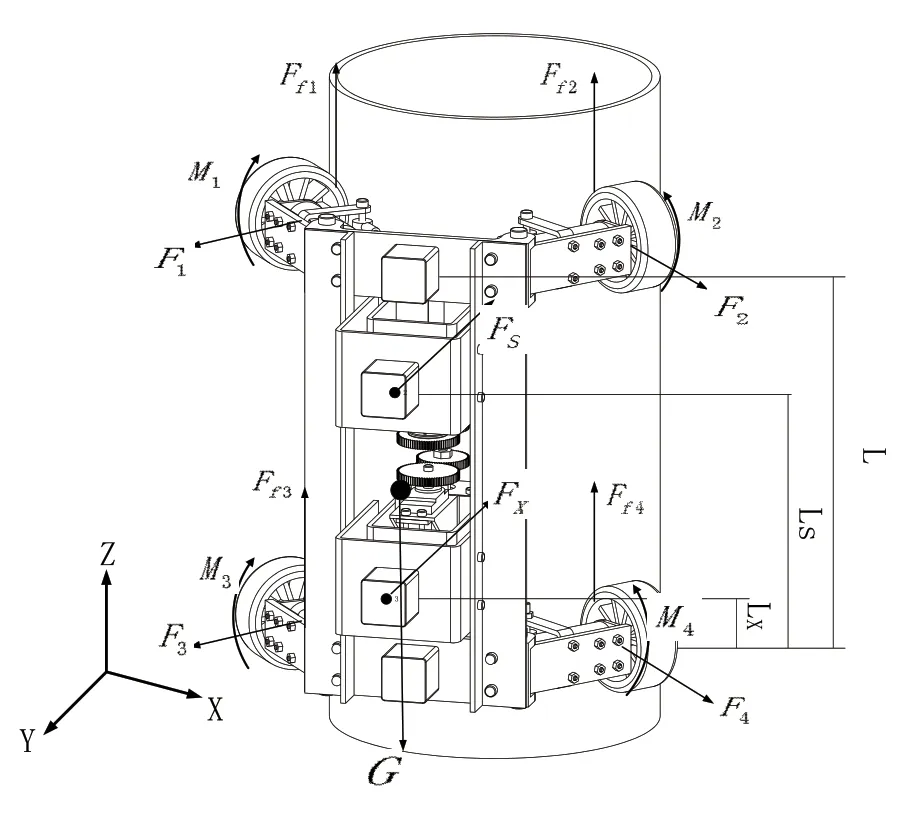
圖6 整體受力圖
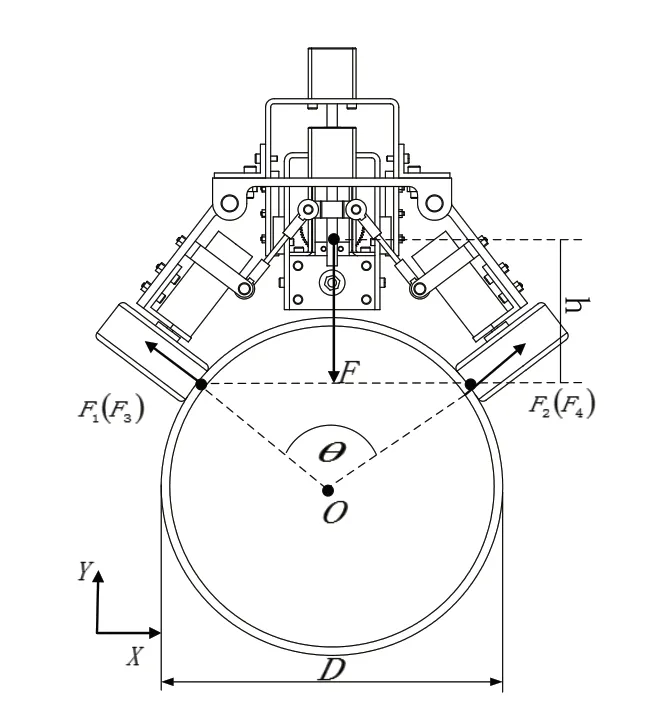
圖7 受力俯視圖
驅動輪與管壁之間的正壓力為F1、F2、F3、F4,驅動輪與管壁之間的摩擦力為Ff1、Ff2、Ff3、Ff4,由于機器人前后吸附模塊的吸附力可調,可以通過吸附力的控制,使機器人四個驅動輪與管壁之間的正壓力保持相同的值,達到最佳的驅動效果。在這個理想狀態下進行機器人的動力學分析。
建立力學平衡方程:
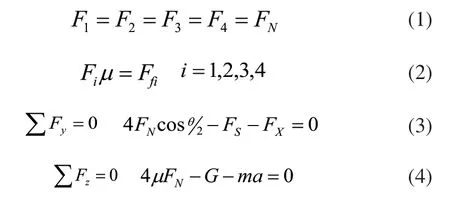

整理以上關系式得:
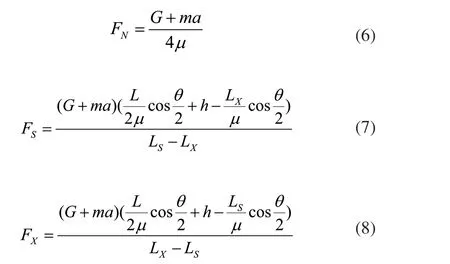
式中:
FN為單個驅動輪的正壓力,N;
FS為上吸附塊的吸附力,N;
FX為下吸附塊的吸附力,N;
μ為摩擦系數;
G為機器人自重和負載重力總和,N;
m為機器人質量,kg;
a為最大加速度,m/s2;
θ為兩驅動輪包圍管道的圓心角,度;
L為上下兩對驅動輪之間的軸距,mm;
LS為上吸附塊距下驅動輪軸平面距離,mm;
LX為下吸附塊距下驅動輪軸平面距離,mm;
MF為各作用力相對于下部兩輪與管壁接觸點的連線的傾覆力矩之和,Nmm;
機器人質量m=10kg(負載和自重),最大加速度a=0.1m/s2,L=250mm,LS=190mm,LX=60mm,驅動輪與管壁之間的摩擦系數為μ=0.5,角度θ取決于管徑的大小,所爬管道直徑200mm時θ=120°,1000mm時θ=30°,即:30°≤θ≤120°。帶入以上數據得FS最大值為103.25N,FX最大值為88.02N,故單個吸附模塊吸附能力需大于103.25N。考慮實際工作時四個驅動輪的正壓力不可能完全相等,為保證安全,再乘以1.2倍的安全系數。
2 吸附能力研究
2.1 吸附原理分析
本文提出的新型吸附機構,借鑒永磁起重吸盤磁力調節的原理[8],對磁柱徑向勵磁,通過旋轉磁柱的方式改變吸附力大小,原理圖如圖8、圖9所示。中間圓形為徑向勵磁的磁柱,兩側為槽型銜鐵塊,下方為鐵磁性物體,當磁極為豎直方向時(如圖8所示),磁感線從銜鐵塊內部通過形成閉合回路,鐵磁性物體未被磁化,此時對鐵磁性物體的永磁吸附力最小;當磁極為水平方向時(如圖9所示),磁感線先經過兩側的槽型銜鐵,再經過鐵磁性物件形成閉合回路,此時對鐵磁性物件產生最大的吸附力;使磁柱旋轉90°,吸附力即可從最小變到最大。利用這種磁力調節方式調節吸附力有以下優點:一是在保持吸附距離不變的情況下依然可以調節吸附力;二是在機器人需要從管壁上取下時,把吸附力調到最小,取下更加輕松方便。
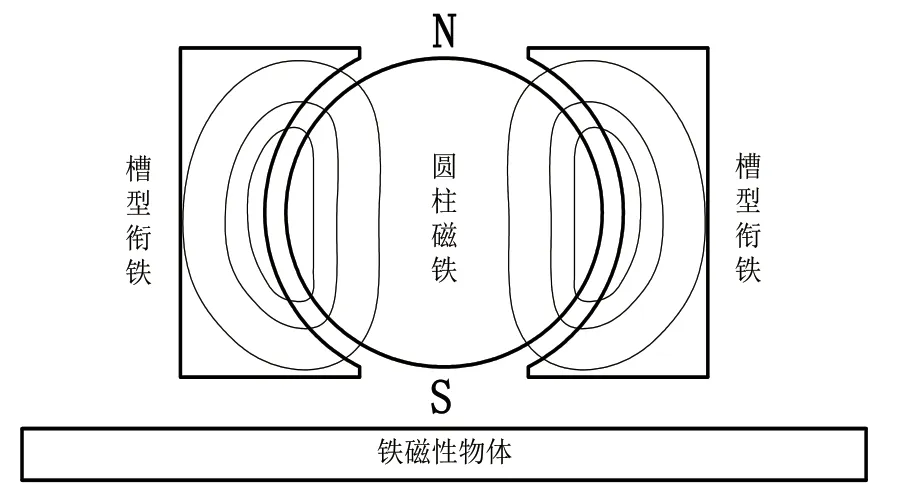
圖8 去除吸附力狀態
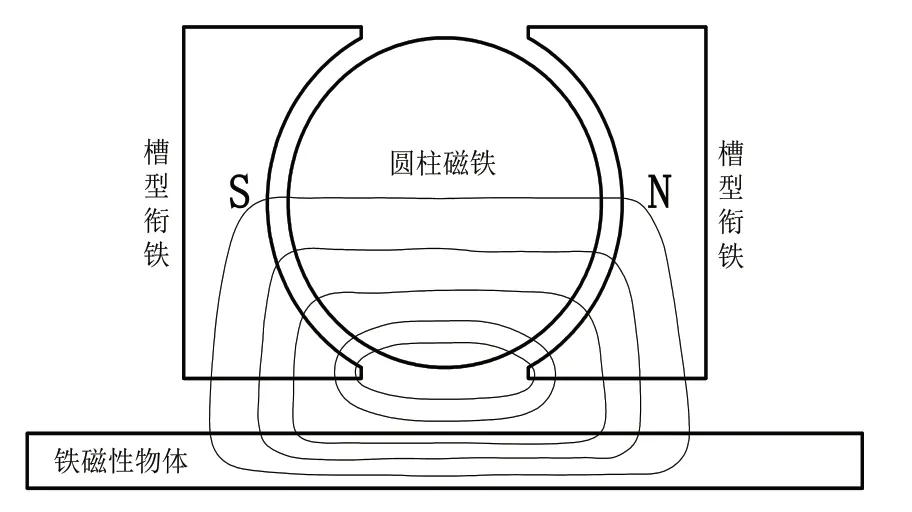
圖9 最大吸附力狀態
2.2 吸附力仿真分析及結構優化
利用Ansoft軟件對吸附模塊的永磁吸附能力進行建模分析,并計算在磁柱不同旋轉角度下的吸附能力。首先簡化模型,省略其他機構,留取一段管道(直徑200mm,壁厚5mm,長度260mm)、磁柱(NdFe35)和磁柱兩側的銜鐵(steel1008)。磁柱為徑向勵磁,尺寸為:直徑30mm,長60mm和直徑5mm的通孔。圖10所示為簡化后的仿真模型及網格劃分效果,圖11為吸附模塊磁場強度分布云圖。
圖12為吸附模塊簡化后的平面圖,其中D尺寸為10mm,利用單一變量法分別得到A、B、C的尺寸對吸附力的影響趨勢圖,如圖13~圖15所示。
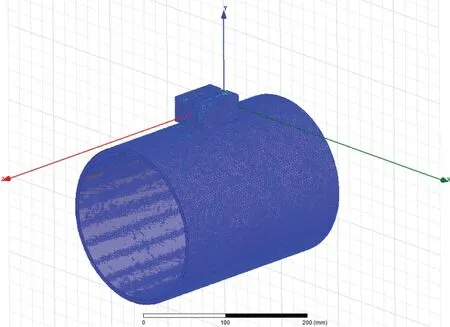
圖10 仿真模型網格劃分效果
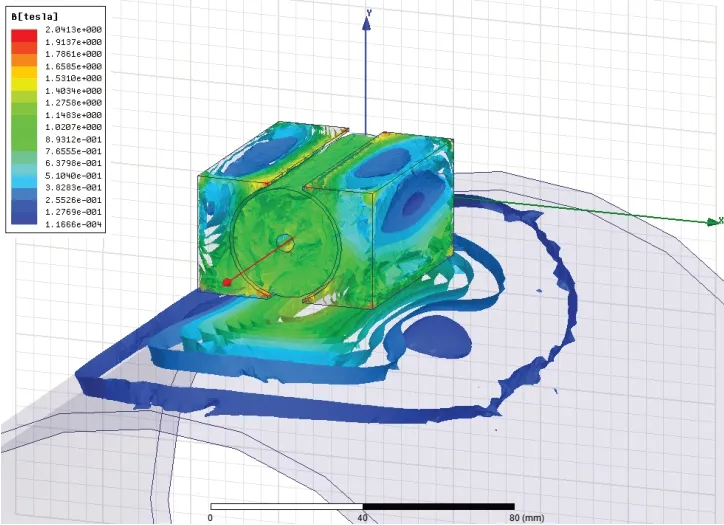
圖11 磁場強度分布云圖
圖12 吸附模塊平面圖
圖13 寬度A對磁力影響
圖14 寬度B對磁力影響
圖15 間隙C對磁力影響
由圖13可知,當A=40mm時吸附力達到最大;為了對磁柱起到一定的保護作用,寬度B需要大于磁柱直徑,故取B=32mm;間隙C太小容易與磁柱產生摩擦,太大容易吸附鐵屑進入間隙,故取C=1.5mm。
圖16所示,吸附力隨旋轉角度的變化幾乎是線性下降的,當磁極由水平(0°)狀態變為豎直(90°)狀態時,吸附力由155N降為19N,下降明顯。
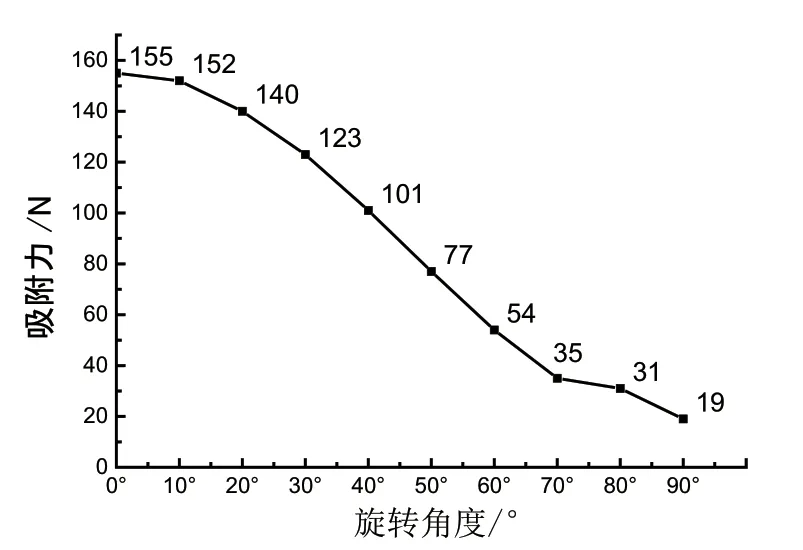
圖16 吸附距離為5mm時吸附力隨旋轉角度的變化趨勢
保持磁柱磁極為水平狀態不變,吸附力隨吸附距離變化趨勢如圖17所示。吸附力隨吸附距離的增加下降非常明顯,在吸附距離為7mm時,吸附力即下降到98N,7mm~12mm之間吸附力變化緩慢。因為單個吸附模塊吸附力需大于123N,由圖17可以看出,吸附距離需小于6mm,為了保證一定的通過性,同時又兼具安全性和穩定性,將吸附距離穩定在5mm~6mm之間。
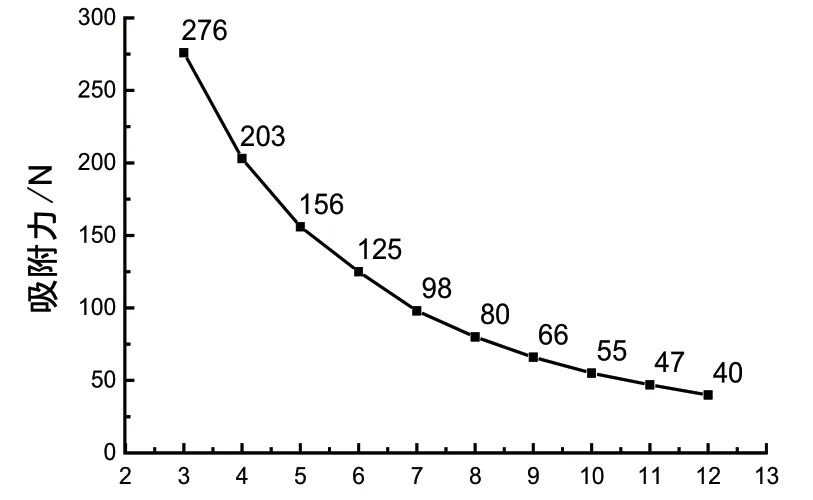
圖17 磁極為水平方向時吸附力隨距離的變化
3 實驗
根據以上機器人構型研究及吸附能力分析,搭建了樣機模型,并進行了實際爬行實驗。機器人整體的設計重量為5kg,負載能力5kg,車輪與管面之間的摩擦系數取0.5。分別對直徑300mm和直徑1000mm的管道進行了爬行實驗,爬行速度9cm/s,機器人向上爬行1m,然后停止保持靜止吸附狀態20s,最后向下返回1mm。機器人附著效果較好,爬行穩定,吸附距離達到5mm以上,達到了預期效果。不同管徑管道的爬行實驗狀態如圖18所示。
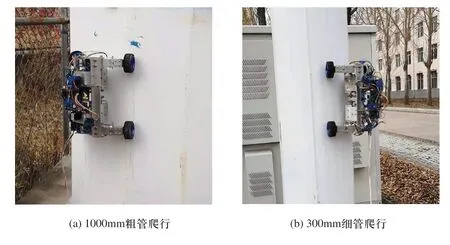
圖18 不同管徑爬行狀態
4 結語
本文針對直徑較大的鐵磁性管道提出了基于輪臂式的非包圍式爬管機器人,以四連桿機構為支撐,輪臂張角可調,可適應直徑200mm~1000mm的管道,適用范圍更多。研究了具有磁力可調功能的吸附機構,開展了吸附模塊的有限元分析,對吸附機構進行了優化,吸附距離達到5mm以上,在一定范圍內可以達到吸附力自適應。機器人整體體積小,重量輕,吸附穩定,能夠安全爬行。
