一種應用于著陸支撐系統中的鎖緊機構設計與仿真
2019-12-05 05:10:06田保林于海濤張宏劍
宇航總體技術 2019年6期
關鍵詞:分析
田保林,于海濤,閆 振,張宏劍
(1.哈爾濱工業大學機電學院,哈爾濱 150001;2.北京宇航系統工程研究所,北京 100076)
0 引言
近年來,藍色起源及Space-X公司對垂直起降技術(VTVL)進行了相關研究并先后完成火箭回收工作。藍色起源公司最早于2015年成功將New Shepard[1]發射到預定亞軌道并完成回收;于2016年開始從事New Glenn的研究,可重復使用次數預計可達100次。Space-X[2]公司于2011年開始從事可回收火箭的研究工作,近兩年先后實現Falcon Heavy火箭及Block5型運載火箭的發射任務,Falcon Heavy火箭在現有運載火箭中運載能力最大。2019年4月,重型獵鷹在完成Arabsat-6A衛星發射任務后,成功將助推器和主體火箭進行回收。獵鷹9號Block 5型是獵鷹9號最新的升級版構型[3],目標是在簡單維護后重復使用次數達10次,經過后期維修后重復使用次數實現100次。
著陸支撐系統是確保火箭穩定著陸的前提和保證,在火箭返回過程中通過柵格舵[4]進行姿態與著陸點位置控制,利用剩余燃料啟動發動機實現減速,并通過著陸支撐機構實現火箭近地軟著陸。著陸瞬間通過緩沖材料實現沖擊能量吸收,瞬間碰撞對支撐機構瞬態強度要求較高,設計一種具有較為可靠性的支撐系統尤為重要。國內航天院所及高校開展了相應的研究工作,高樹義等[5]總結了我國60年來在航天器回收技術領域取得的成就和未來發展趨勢。崔乃剛等[6]對垂直起降運載器現狀進行分析并總結回收過程中的關鍵技術。肖杰等[7]對支撐機構進行研究,并利用氣體作動實現展收動作。Zhang等[8]對支撐機構軟著陸影響因素進行分析,并通過試驗驗證緩沖器特性。王海洋[9]對著陸過程動力學進行建模并分析著陸過程相關影響因素。楊文淼等[10]通過ADAMS二次開發模擬鋁蜂窩特性并對著陸過程進行仿真分析。畢春瑩[11]對平行四邊形著陸支撐機構進行設計并分析著陸穩定特性。
本文針對現有支撐機構在展開過程中分析不足等問題,提出一種全新的支撐機構構型并對鎖緊機構進行結構設計與仿真分析,探究鎖緊機構擬定彈簧參數的可行性以及主要影響。
1 著陸支撐機構展收原理
基于拓撲理論對支撐機構構型進行研究并提出一種支撐機構,該支撐機構能夠實現自動展開與收攏,通過更換緩沖材料實現多次使用。其展開收攏過程如圖1所示,其中AB連桿作為主支撐板承受較大側向力及拉伸力,CD連桿作為緩沖支撐桿,其上安裝有鋁蜂窩緩沖器完成對沖擊動能的吸收,EF連桿作為驅動連桿,當鎖緊連桿GK完成驅動并實現鎖定后,三角形FGK成為靜定結構,從而實現穩定支撐。各連桿之間通過圓柱銷進行連接,火箭主體部位通過預留3個鉸鏈安裝位置分別與連桿中A、F、K鉸鏈實現轉動連接,其中鉸鏈C中安裝有萬向球軸承,以防各連桿發生運動干涉。
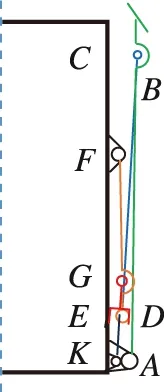
(a)收攏狀態
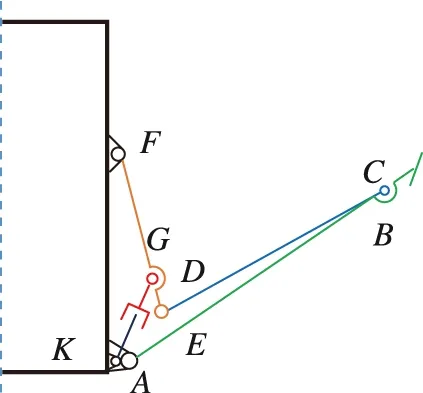
(b)中間狀態
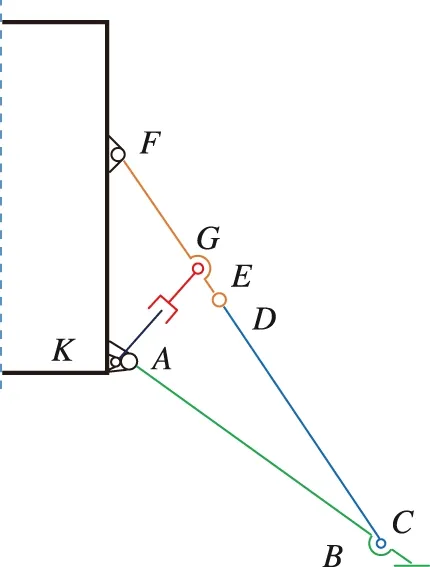
(c)展開狀態
支撐機構展開過程相關特性受到重力、空氣阻力等影響,支撐機構受力分析如圖2所示。
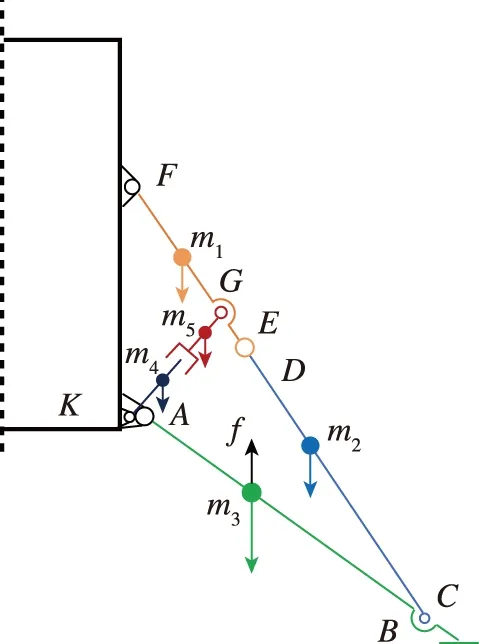
圖2 支撐機構受力分析圖

(1)
由于支撐板在展開過程中處于迎風面,包裹其他連桿,在此忽略其他連桿所受阻力,若展開過程火箭速度為v,則支撐板AB所受空氣阻力耗散功如式(2)所示

(2)

(3)
基于對1200mm原理樣機設計并進行展開過程仿真分析,得到鎖緊連桿相對速度近似為2000mm/s。
2 可行性驅動展開鎖緊機構設計
2.1 鎖緊機構結構設計
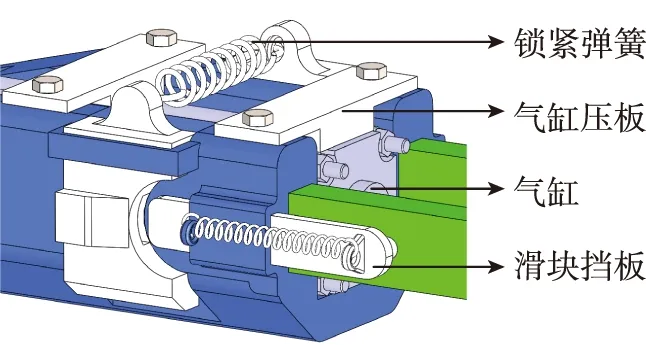
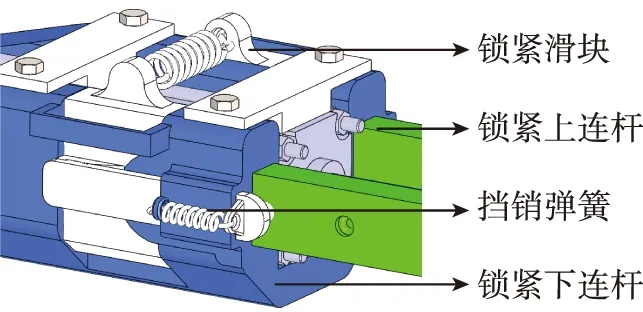
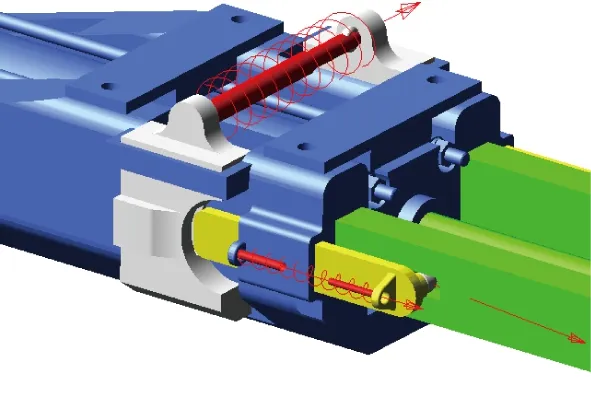
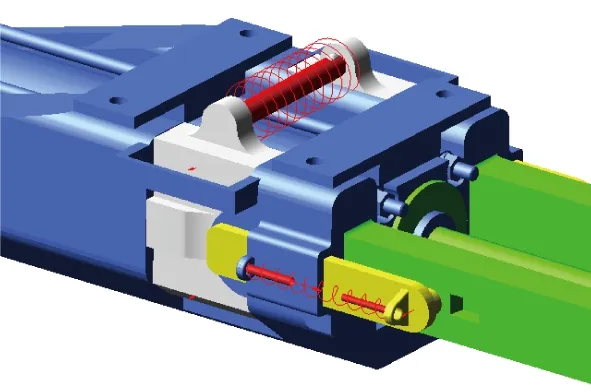
鎖緊機構包含驅動元件和鎖緊構件,圖1(a)為收攏狀態,此時通過氣缸進行初始作動增大展開初始速度,當支撐機構達到圖1(b)中間狀態時,依靠支撐板重力進行展開,而后達到圖1(c)展開狀態時完成鎖定動作。鎖緊前狀態如圖3中(a)、(c)所示,鎖緊后狀態如圖3中(b)、(d)所示。其中鎖緊滑塊通過圓弧和矩形面配合實現依附于鎖緊下連桿表面運動,其他各連桿通過矩形面配合實現移動自由度。
鎖緊機構工作流程為:氣缸伸長帶動鎖緊上連桿運動至預定長度,此時鎖緊上連桿凹槽帶動鋼球及滑塊擋板移動并牽引擋銷彈簧,當滑塊擋板運動到預定位置后釋放鎖緊滑塊,鎖緊滑塊由于鎖緊彈簧作用實現靠攏從而限制鎖緊上連桿返回,此時完成一次鎖定動作。而后鎖緊上連桿繼續帶動滑塊擋板運動并拉伸擋銷彈簧,當擋銷彈簧彈力大于鋼球彈簧分力時牽引滑塊擋板返回,從而限制鎖緊滑塊遠離,并完成鎖緊滑塊的二次鎖定。當完成回收工作后通過人工釋放擋銷彈簧及鎖緊彈簧預載力,進行人工復位從而實現多次使用。
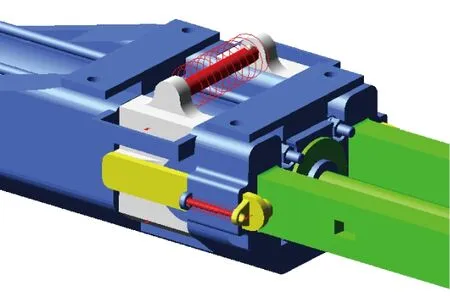
支撐機構落地瞬間驅動上連桿壓緊鎖緊滑塊,此時由于驅動下連桿及鎖緊滑塊彈性變形等,導致鎖緊滑塊具有遠離的運動趨勢,通過二次鎖定可較好地預防鎖緊失效狀況。
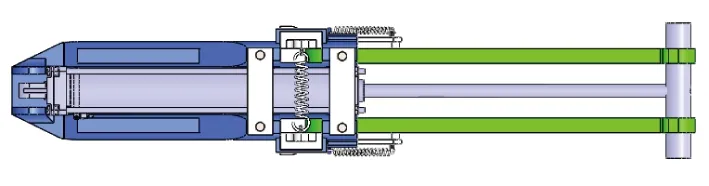
(a)
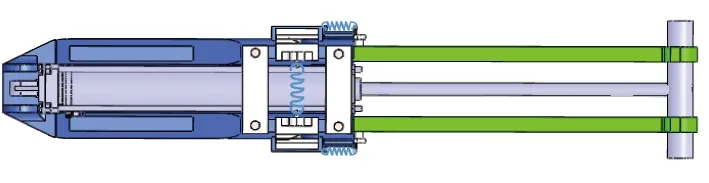
(b)
(c)
(d)
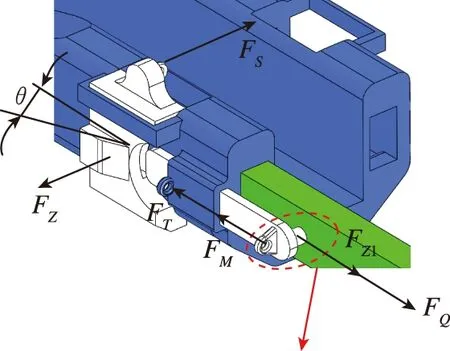
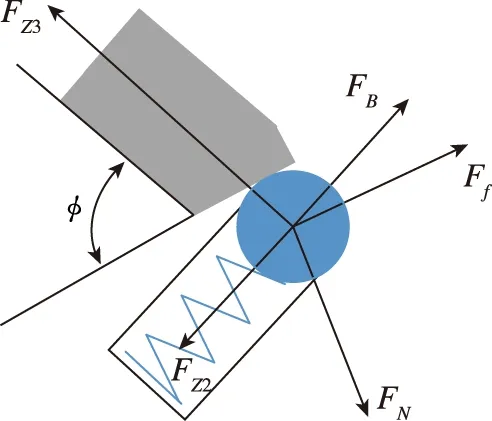
2.2 鎖緊機構力學特性分析
鎖緊機構各構件安裝形式如圖3所示,其中滑塊擋板末端安裝有鋼球彈簧及鋼球,通過鋼球彈簧與擋銷彈簧力的相對變化關系實現牽引和釋放。對上述鎖緊機構進行模型簡化,并對其進行受力分析,如圖4所示。
(a)

(b)
(c)
(d)
定義鎖緊機構鎖緊滑塊彈簧力為FS,受擋銷支撐力為FZ。擋銷受鎖緊上連桿牽引力FQ,受鎖緊下連桿支撐力FZ1,受彈簧拉力FT,受滑塊摩擦力FM,以及二次鎖定時滑塊斜面力FD。鋼球受彈簧力FB,斜面壓力FN,斜面摩擦力Ff,擋銷支撐力FZ3,以及驅動上連桿支撐力FZ2。定義滑塊斜面角度θ,鋼球槽角度φ。
若滑塊質量為MH,擋銷質量為MX,鋼球質量為MG,則鎖緊滑塊等構件在釋放前力學分析如式(4)所示
(4)
各移動構件在釋放過程中力學方程如式(5)所示
(5)
釋放后滑塊擋板回彈實現鎖緊滑塊二次鎖定,此時滑塊擋板等受力如式(6)所示
F′T-FDsinθ=MXaS2
(6)
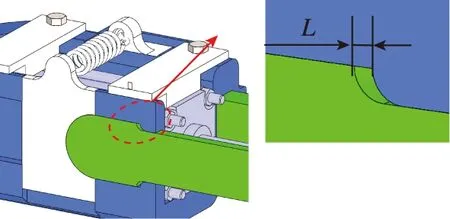
在鎖緊機構釋放前微弱的運動趨勢近似不計,aJi(i=1~3)=0,依據式(5)中aG1積分可計算鎖定時間,依據式(6)中aS2計算二次鎖定時間。若鎖緊上連桿鎖定余量L為5mm,鋼鐵碰撞恢復系數近似為5/9,則可根據運動學方程計算上驅動連桿碰撞反彈時間。通過對比鎖緊時間與碰撞反彈時間確定鎖緊機構可行性。
3 彈簧參數對鎖緊機構可行性影響分析
3.1 移動構件屬性參數
通過對上述鎖緊機構可行性進行理論分析,并依據展開過程實際工況,為確保鎖定可靠,擬定鎖緊機構主要零部件參數信息如表1所示,滑塊斜面等角度如表2所示。
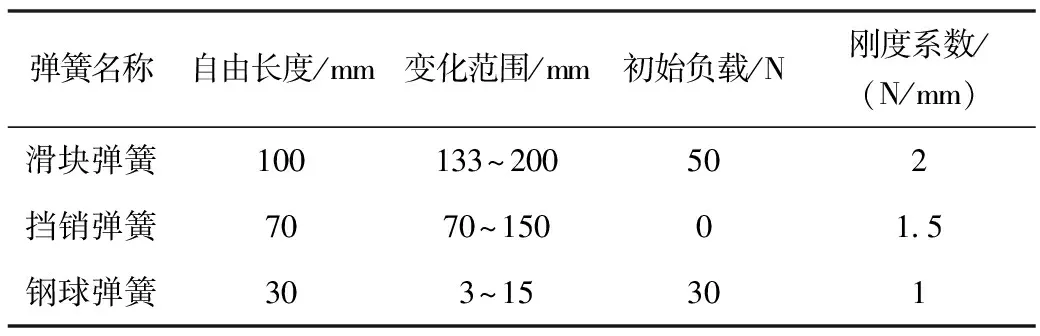
表1 鎖緊機構彈簧參數

表2 滑塊及上連桿凹槽角度
3.2 鎖緊可行性仿真分析
通過ADAMS建立虛擬樣機仿真模型[12],添加關節運動并設置彈簧及碰撞力參數,鎖緊流程仿真分析如圖5所示。

(a)收攏狀態
(b)牽引釋放
(c)鋼球脫離
(d)二次鎖定
為探究彈簧參數對鎖緊可行性的影響,現施加驅動速度2000mm/s,彈簧參數如表1所示,其鎖定過程特性曲線如圖6、圖7所示。
當設置彈簧參數如表1所示時,即鋼球彈簧與擋銷彈簧參數存在耦合關系時,可在預定位置完成釋放動作,并在0.02s內完成滑塊二次鎖定。
當提高鋼球彈簧預壓載荷為50N、剛度系數為1.5N/mm時,移動構件位移曲線如圖8所示。
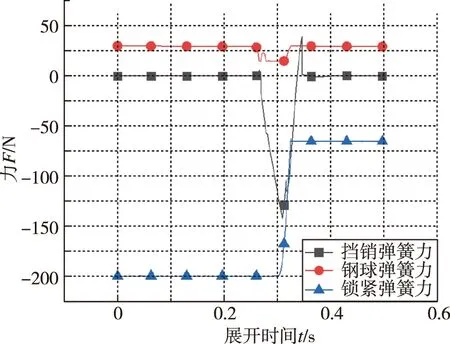
圖6 各彈簧受力曲線

圖7 移動構件位移曲線
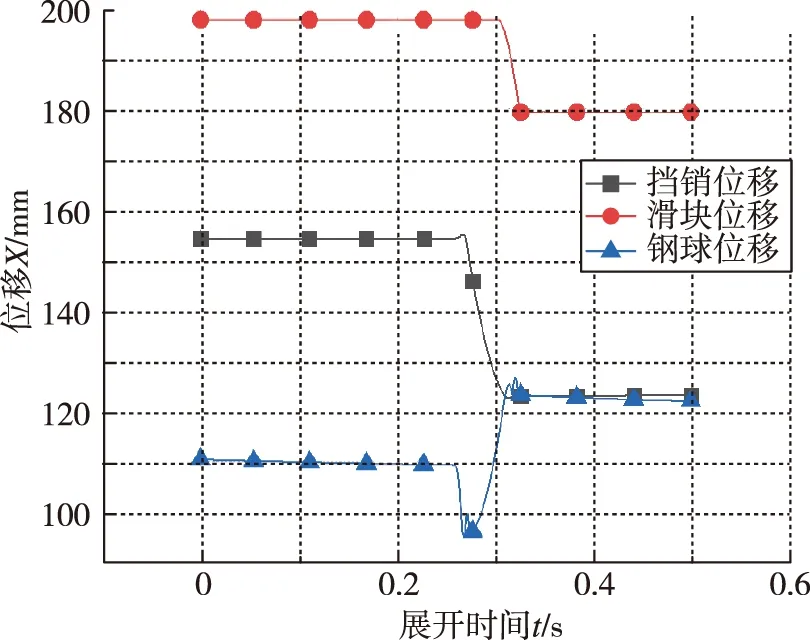
圖8 增大鋼球彈簧參數的影響
當增大鋼球彈簧參數時,可完成滑塊的移動鎖緊動作,由于鋼球無法完成脫離,擋銷未能實現二次鎖定,此時鎖緊可靠性相對較低。
若增加擋銷彈簧初始負載為-10N(彈簧處于拉伸狀態),此時移動構件運動狀態如圖9所示。
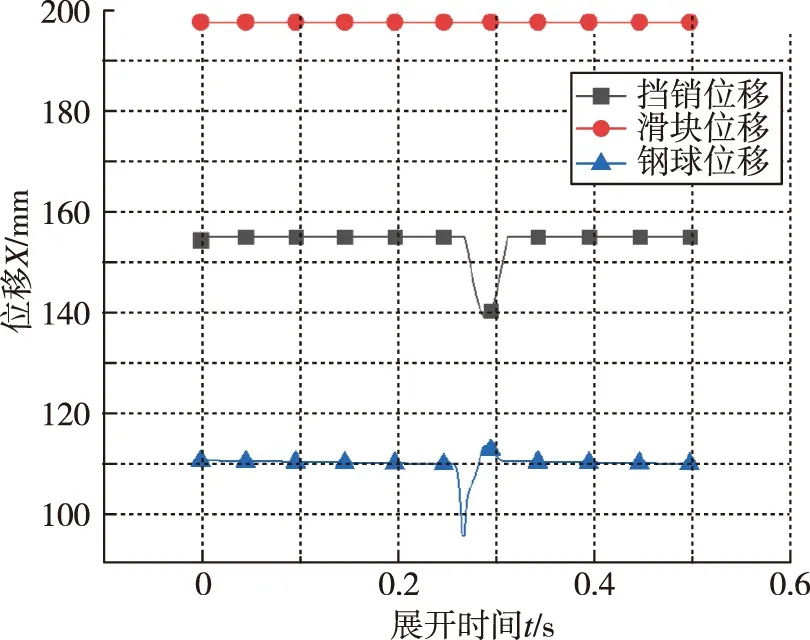
圖9 增大擋銷彈簧參數的影響
當增大擋銷彈簧初始負載時,此時由于鋼球彈簧載荷分量小于擋銷彈簧拉力,無法實現牽引動作,將無法完成鎖定。
通過對原理樣機仿真分析,得知擋銷彈簧參數與鋼球彈簧參數存在數值關系,此結論與前文推導方程相對應。為確保展開與鎖定過程可靠,需保證鋼球彈簧牽引力分量大于擋銷彈簧牽引拉力,此時可保證鎖緊滑塊順利釋放,若保證二次鎖定動作順利完成,需合理匹配兩者數值大小關系。
4 結論
針對現有著陸支撐機構展開可靠性方面的問題,本文提出一種全新的支撐機構并對主要的鎖緊機構進行結構設計和力學特性分析,通過選擇合理的彈簧參數,實現在預定位置一次、二次鎖定動作。本文通過建立虛擬樣機仿真模型,對鎖緊機構運動過程進行仿真分析,通過對曲線位移時間節點對比并觀測鎖緊機構各桿件運動狀態,得知擬定的參數能夠實現預定的鎖緊功能。本文對擋銷彈簧、鋼球彈簧參數的影響進行了分析,從而為確保鎖緊機構能夠滿足功能需要提供技術支撐。
后續工作將考慮支撐機構在不同高度落地時瞬間碰撞對鎖緊機構的影響,以及展開過程中不同重力加速度對展開狀態及鎖緊機構的影響。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
