基于CCD自動巡線智能小車設計
2019-12-05 02:37:08司開波呂林濤
宇航計測技術 2019年5期
司開波 黃 健 呂林濤
(西京學院信息工程學院,陜西西安 710123)
1 引 言
在智能車設計中,通常要實現自動循跡功能,因此人們研究了多種方法。文獻[1]采用光電傳感器TCRT5000,以STC12C5A60S2為控制核心,實現了對黑白線的自動循跡。文獻[2]采用新型數字式電感傳感器LDC1000實現了對細鐵絲構成的跑道的自動循跡。
文獻[1]采用的方法,也是常用的一種循跡方法。采用光電傳感器,根據白線反射光強,黑線反射光弱的原理識別黑白線,達到自動巡線的功能。但該方法對黑線的寬度和當前光照強度有要求,如果當前自然光照強度大,很難識別黑白線;如果黑線寬度較細,也較難識別;如果是彎道,由于角度變化,識別也比較困難。而本文提出的CCD線陣傳感器,包含128個光電二極管的線性陣列,構成128個像素,每個像素的光敏面積是3 524.3μm2,像素之間的間隔是8μm。每個像素點具有256(8bit)級灰度輸出。相比于單個或多個光電傳感器TCRT5000,輸出精度更高,采集的信息點更多,采集范圍更寬。因此,實現的自動循跡功能更強。
2 系統設計
2.1 線性CCD工作原理
該傳感器是包含128個光電二極管的線陣,光電二極管在光的照射下產生光電流。如圖1所示構成了光電二極管積分電路,二極管上累積的電荷量與光強度和光照時間成正比。當開關S1在1上時,積分電容上流過的電流和光電流相等,對光電流進行積分。當S1切換到2時,釋放積分電容上累積的電荷。S2采樣輸出,當S2切換到1上時,使得采樣電容電壓等于運放輸出電壓,切換到3時,輸出電壓,在2時,其它光電二極管輸出電壓[3-5]。CCD內部有移位寄存器和邏輯控制器,可依次輸出128個像素點的電壓。

圖1 光電二極管積分原理圖Fig.1 Photodiode Integration Principle Diagram
2.2 系統設計框圖
系統設計框圖如圖2所示,主控采用高性能微處理器STM32F103ZET6,主頻72MHz,具有豐富的資源和I/O接口。采用3.3V供電,CCD線陣首先采集黑線的信息,通過A/D接口送給主控STM32,主控對數據進行處理,用中值算法尋找黑線中心位置,并與小車中心點位置比較。當車身偏左時,控制小車右轉;當車身偏右時,控制小車左轉;當正在黑線的正上方時,小車直行。電機驅動采用TB6612,用編碼器測速,用速度PID控制PWM波輸出,使得小車行進穩定、可靠。并增加藍牙串口模塊,可將小車行進的相關數據發送給上位機,便于調試。
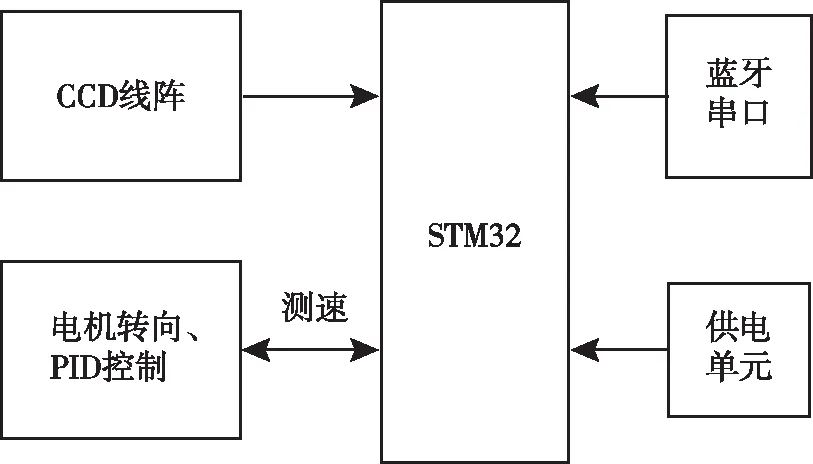
圖2 系統框圖Fig.2 System block diagram
3 硬件電路設計
3.1 CCD硬件電路設計
CCD與STM32的連接圖如圖3所示。STM32的PA4引腳控制數據的起始位,PA2提供讀寫的時鐘信號,PA3作為模擬A/D輸入引腳,可連續讀取128個像素點的輸出電壓,作為軟件處理中的原始數據[4-7]。

圖3 CCD與STM32連接圖Fig.3 Connection Chart of CCD and STM32
3.2 TB6612電機驅動電路設計
TB6612電機驅動電路圖如圖4所示,TB6612適合驅動小型直流電機,可同時驅動2路直流電機,峰值電流可達到2A,相比于L298具有體積小、性能高等優點。圖中PF13,PF14,PC6控制1路電機,PF13,PF14控制電機的轉向,PC6輸出PWM波,控制電機的轉速。對應的輸出為OUT1和OUT2。PF15,PG0,PC7控制另外1路電機,PF15,PG0控制電機的轉向,PC7輸出PWM波,控制電機的轉速。對應的輸出為OUT3和OUT4。VM為電機驅動所需電壓,要高于6V,設計中采用7V[8]。VCC為芯片工作電壓,是5V。

圖4 TB6612電機驅動硬件原理圖Fig.4 Hardware schematic diagram of TB6612 motor drive
對電機測速時,采用編碼器,每旋轉1圈,輸出390個脈沖,將其接入STM32F103ZET6的定時器2,測量每秒鐘脈沖的個數實現測速。
3.3 串口藍牙電路設計

圖5 藍牙接口電路設計Fig.5 Bluetooth interface circuit design
串口藍牙電路圖如圖5所示,圖中藍牙連接到STM32F103ZET6的串口2上,要實現藍牙通信,必須是一對。上位機的連接方法與圖5所示相同。通信之前,首先用串口調試助手對2個藍牙模塊進行設置,設置好后2個藍牙模塊會自動配對。通過串口2的PD5(RXD)和PD6(TXD)實現數據的收發。可將CCD數據,電機測速數據等發送給上位機,方便調試。
4 軟件編程
4.1 軟件流程圖
在KEIL MDK5.0下用C語言編程,軟件流程圖如圖6所示。

圖6 軟件流程圖Fig.6 Software flow chart
軟件編程時,首先對定時器、串口等進行初始化,然后通過A/D循環采集128個像素點的數據。通過顏色識別找到黑線的2個邊緣,記下此時像素點的位置I和J(I K=I+(J-I)/2 (1) PWM+=Kp[e(k)-e(k-1)]+Ki×e(k) +Kd[e(k)-2e(k-1)+e(k-2)] (2) 式中:Kp——比例系數;Ki——積分系數;Kd——微分系數;e(k)——當前位置誤差;e(k-1)——上一次位置誤差;PWM——脈沖寬度。 以下是找到黑線并計算中心代碼,該段代碼在定時器Timer1中每隔100ms調用一次。對小車的控制采用動態閾值智能控制方法,當到達閾值范圍內,控制小車直行,否則控制小車左轉或者右轉,按流程圖所示進行。這樣可以避免小車左右搖擺,這樣就能在幾秒內將小車調整到中心位置。 void Find_CCD_Zhongzhi(void) {static u8 i,j,Left,Right,Last_CCD_Zhongzhi;static u16 value1_max,value1_min;value1_max=ADV[0];//動態閾值算法,讀取最大和最小值 for(i=5;i<123;i++)//兩邊各去掉5個點 {if(value1_max<=ADV[i]) value1_max=ADV[i];} value1_min=ADV[0];//最小值 for(i=5;i<123;i++) {if(value1_min>=ADV[i]) value1_min=ADV[i];} CCD_Yuzhi=(value1_max+value1_min)/2;//計算出本次中線提取的閾值 for(i = 5;i<118; i++)//尋找左邊跳變沿 {if(ADV[i]>CCD_Yuzhi&&ADV[i+1]>CCD_Yuzhi&&ADV[i+2]>CCD_Yuzhi&&ADV[i+3] {Left=i; break;} } for(j = 118;j>5; j--)//尋找右邊跳變沿 {if(ADV[j] {Right=j; break;} } CCD_Zhongzhi=(Right+Left)/2;//計算中線位置if(myabs1(CCD_Zhongzhi-Last_CCD_Zhongzhi)>70)//計算中線的偏差,如果太大 CCD_Zhongzhi=Last_CCD_Zhongzhi;//則取上一次的值 Last_CCD_Zhongzhi=CCD_Zhongzhi;//保存上一次的偏差 } 設計并調試好硬件電路和軟件程序后,就可以進行測試了。測試時,首先對鏡頭進行調焦,調焦如式(3)或式(4)所示 f=v×D/V (3) f=h×D/H (4) 式中:f——鏡頭的焦距長度;v——拍攝對象成像后的縱向尺寸;V——拍攝對象實際的縱向尺寸;D——鏡頭和拍攝對象之間的距離;h——拍攝對象成像后的橫向尺寸;H——拍攝對象實際的橫向尺寸。 測試時,所選用的鏡頭的成像區域為8.128mm×0.063 5mm,焦距可調。 測試時跑道如圖7所示。相距最遠的2條黑線的外邊沿間距是25cm,即橫向尺寸H為25cm。鏡頭與目標距離D為80cm,鏡頭焦距f為6mm,經過式(4)計算,可得到成像后的橫向尺寸h如式(5)所示 h=f×H/D=6mm×25cm/80cm=1.875mm 圖7 測試用跑道示意圖Fig.7 Test Runway 而鏡頭的成像區域為8.128mm×0.0635mm,橫向長度為8.128mm,對應128個像素點,則1.875mm對應像素點是29.5,接近于30個。 通過藍牙發送數據給上位機,可以得到如圖8所示的測試數據。 圖8 測試數據1Fig.8 Test data 1 圖8顯示了經過軟件處理后的數據,最小值是18,最大值是86,中間值是52,并顯示了灰度圖和二值化圖。 圖9顯示了當焦距為8mm時測量數據,鏡頭與目標距離D為30cm時測得的數據。從圖中可得到最小值是20,最大值是127,中間值是73,并顯示了灰度圖和二值化圖。 在實際測量中,由于環境亮度有所不同,測量值會有所不同.因為像素的亮度與曝光時間(積分時間)和環境亮度成正比,所以當光線比較暗時,增加曝光時間;當光線比較亮時,減少曝光時間。曝光時間可用軟件調整。 圖9 測試數據2Fig.9 Test data 2 對圖9所示數據提高曝光時間,焦距保持8mm,鏡頭與目標距離D不變,仍為30cm。得到測試數據如圖10所示。 圖10 測試數據3Fig.10 Test data 3 從圖中可以看到,增大曝光時間后,最大值、最小值、中間值明顯增大,中間值變為135。因此,當光線較暗時,可增加曝光時間,增強識別能力。 文中仔細研究了CCD識別顏色的基本工作原理。設計了硬件電路,在MDK下編寫了C程序,采用中值算法得到了黑線的中線位置,通過PID算法控制了小車的行駛,實現了用攝像頭循跡,為智能小車的自動循跡提供了一種新方法。測試結果表明:該方法相比于普通光電傳感器,具有性能可靠、穩定、速度快等優點。4.2 關鍵代碼
5 測試結果處理




6 結束語
