深度約束下的聲速估算?
2019-11-30 05:47:56孟慶波王振杰
應(yīng)用聲學(xué) 2019年5期
孟慶波 王振杰
(中國(guó)石油大學(xué)(華東)地球科學(xué)與技術(shù)學(xué)院 青島 266580)
0 引言
高精度的水下定位技術(shù)在海洋勘探、礦產(chǎn)資源開(kāi)發(fā)、水下運(yùn)動(dòng)目標(biāo)的導(dǎo)航定位等領(lǐng)域具有重要的應(yīng)用價(jià)值[1?2]。由于衛(wèi)星定位中使用的電磁波會(huì)被海水衰減吸收,而聲波在水中具有良好的傳播性,當(dāng)前的水下定位基本應(yīng)用水聲進(jìn)行通信[3]。進(jìn)行水下目標(biāo)定位時(shí),浮標(biāo)等與水下目標(biāo)的距離R是通過(guò)測(cè)量浮標(biāo)到目標(biāo)物的時(shí)延信號(hào)和聲速計(jì)算得出。現(xiàn)在高精度時(shí)延檢測(cè)技術(shù)在一定范圍內(nèi)檢測(cè)精度可達(dá)微秒級(jí)別,然而聲速會(huì)隨溫度、深度、鹽度的變化而變化,在垂直方向上并不是均勻分布[4],如圖1所示。因此聲線彎曲誤差是對(duì)距離R的精確計(jì)算的主要影響因素。
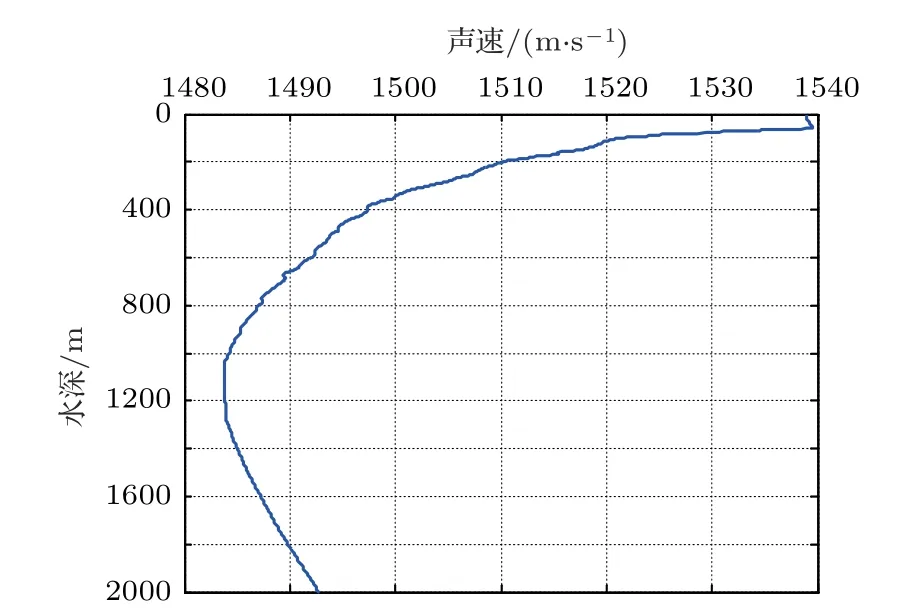
圖1 聲速剖面Fig.1 Sound velocity profile
在獲取到精確聲速剖面情況下,國(guó)內(nèi)外專家學(xué)者對(duì)聲速改正的研究大致有以下幾種方法:等效聲速剖面法、加權(quán)平均聲速法、經(jīng)驗(yàn)聲速法、多項(xiàng)式展開(kāi)法、聲線跟蹤法、有效聲速查表建表法、神經(jīng)網(wǎng)絡(luò)法等。Geng 等[4]在1999年提出等效聲速剖面法觀點(diǎn),其思想是計(jì)算波束腳印時(shí),在相同的傳播時(shí)間內(nèi),如果兩條不同聲速其聲速和深度所圍成的面積相等,則認(rèn)為兩條聲速剖面是等效的,即對(duì)于實(shí)際中復(fù)雜的聲速剖面曲線,總可以找到一條恒等梯度聲速或者等聲速來(lái)替代;加權(quán)平均聲速法是將不同深度的聲速用平均聲速的定義計(jì)算平均聲速,將計(jì)算得到的聲速作為初始聲速,此方法簡(jiǎn)單、應(yīng)用較廣,但精度較低[5?6];經(jīng)驗(yàn)聲速法是將經(jīng)驗(yàn)聲速寫為平均聲速、水深及俯仰角的函數(shù)[7];多項(xiàng)式展開(kāi)法中泰勒級(jí)數(shù)展開(kāi)法是常用的方法,此方法是在平均聲速處展開(kāi)成泰勒級(jí)數(shù),展開(kāi)系數(shù)是俯仰角函數(shù)[8];聲線跟蹤法是一種精確方法,將水層按照一定深度間隔分為多層,根據(jù)Snell 定律逐層跟蹤迭代計(jì)算,又分為分層等聲速跟蹤和分層等梯度跟蹤法[9?10];Vinecent 等[11]提出有效聲速概念,并通過(guò)建表查表建立聲源與目標(biāo)間的有效聲速信息,孫萬(wàn)卿[12]也基于此對(duì)淺海聲速進(jìn)行了研究;神經(jīng)網(wǎng)絡(luò)法[13]在神經(jīng)網(wǎng)絡(luò)的訓(xùn)練及樣本選擇上仍然存在問(wèn)題。在無(wú)聲速剖面的情況下,Yang 等[14]利用測(cè)距誤差和傳播時(shí)間的二次關(guān)系實(shí)現(xiàn)了無(wú)聲剖的水下目標(biāo)靜態(tài)定位,此外鮮有對(duì)無(wú)聲速剖面的研究。
本文在無(wú)聲速剖面數(shù)據(jù)情況下,提出了一種基于深度約束,根據(jù)浮標(biāo)與水下目標(biāo)的空間幾何距離進(jìn)行聲速估算的方法。通過(guò)仿真實(shí)驗(yàn)與淺海實(shí)驗(yàn)數(shù)據(jù)證明了該方法有效可行,且滿足一定的定位需求。
1 定位原理
假設(shè)某時(shí)刻水下目標(biāo)位置為(X,Y,Z),海上布設(shè)的浮標(biāo)位置分別為(X1,Y1,Z1)、(X2,Y2,Z2)、(X3,Y3,Z3),水下目標(biāo)到浮標(biāo)的時(shí)延分別是t1、t2、t3,采用的聲速為C,則浮標(biāo)至目標(biāo)的距離Ri=Cti(i=1,2,3,···)。根據(jù)“圓定位”公式得[15]
通過(guò)解方程便可得到目標(biāo)的位置(X,Y,Z),當(dāng)有多組歷元的觀測(cè)時(shí)可根據(jù)最小二乘的原理求取出目標(biāo)的最佳坐標(biāo)估值[16]。
2 深度約束下有效聲速估算
當(dāng)前水下目標(biāo)裝備有壓力傳感器,一般帶有溫度補(bǔ)償?shù)氖毫鞲衅骶瓤蛇_(dá)0.01%F.S,可測(cè)出目標(biāo)至海面的距離[17?18]。當(dāng)水面平靜無(wú)波動(dòng)時(shí),深度為一常數(shù)。由于海浪作用或者風(fēng)力潮汐影響,實(shí)際海面是波動(dòng)的,深度D為

式(2)中,D為觀測(cè)水深,即壓力計(jì)測(cè)量數(shù);D0為平均海水面至水下目標(biāo)距離;T為潮汐的振幅;ω為波浪影響。趙建虎等[18]指出,波浪的周期為幾秒到幾分鐘不等,水位周期較長(zhǎng),10 min 內(nèi)可視為無(wú)變化。而短時(shí)間內(nèi)可以借助平滑公式消除ω影響:
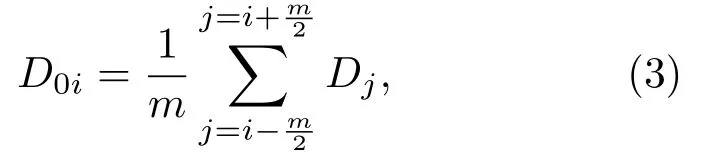
式(3)中,D0i為第i個(gè)深度數(shù)據(jù)的平滑濾波結(jié)果;m為濾波窗口大小。
以平滑濾波后的D為深度約束,通過(guò)比較計(jì)算得出深度Z與D的差異,根據(jù)浮標(biāo)與水下目標(biāo)的空間幾何距離對(duì)聲速進(jìn)行修正。具體步驟如下:
如圖2所示,將初始聲速C0帶入公式(1)得出目標(biāo)的一個(gè)位置B(XB,YB,ZB),將B垂直投影到深度平面上,交點(diǎn)為B′。由“圓定位”原理得知,在時(shí)間測(cè)量準(zhǔn)確的情況下,定位誤差是由聲速偏差引起的交會(huì)半徑誤差造成的。選取海面任意一個(gè)浮標(biāo)(如浮標(biāo)A),可得浮標(biāo)與估計(jì)位置B的距離R=AB=C × t,與投影點(diǎn)B′的距離R′=AB′=(C+?C)×t,由此得
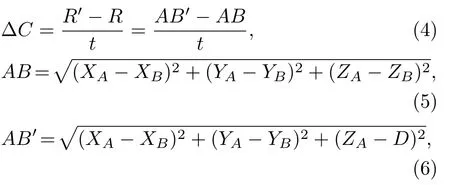
其中,D為根據(jù)目標(biāo)傳感器所得改正后的深度,(XA,YA,ZA)為選擇的浮標(biāo)A坐標(biāo),(XB,YB,ZB)是由公式(1)計(jì)算得出的水下目標(biāo)坐標(biāo)
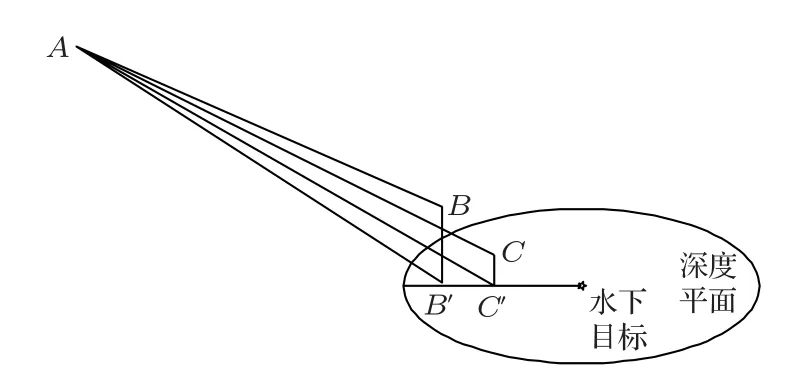
圖2 聲速修正示意圖Fig.2 Sound speed correction
根據(jù)定位精度給出一個(gè)判定值ε,第i次聲速改正后所計(jì)算的深度為zi,當(dāng)zi滿足|zi ?D| < ε時(shí),認(rèn)為目標(biāo)位置符合定位精度要求。否則按照下列條件對(duì)聲速進(jìn)行以下修正:

將改正的新的聲速Ci+1帶入公式(1)得到新的目標(biāo)坐標(biāo)(x′,y′,z′),如圖2中點(diǎn)C的位置,再次判斷z′與D的關(guān)系是否滿足精度,若不滿足重復(fù)公式(4)~(8)進(jìn)行迭代修正,直至滿足精度;若滿足精度,將求得的聲速值帶入公式(1)求得水下目標(biāo)坐標(biāo)(x,y,z)。以上步驟的流程示意圖如圖3所示。
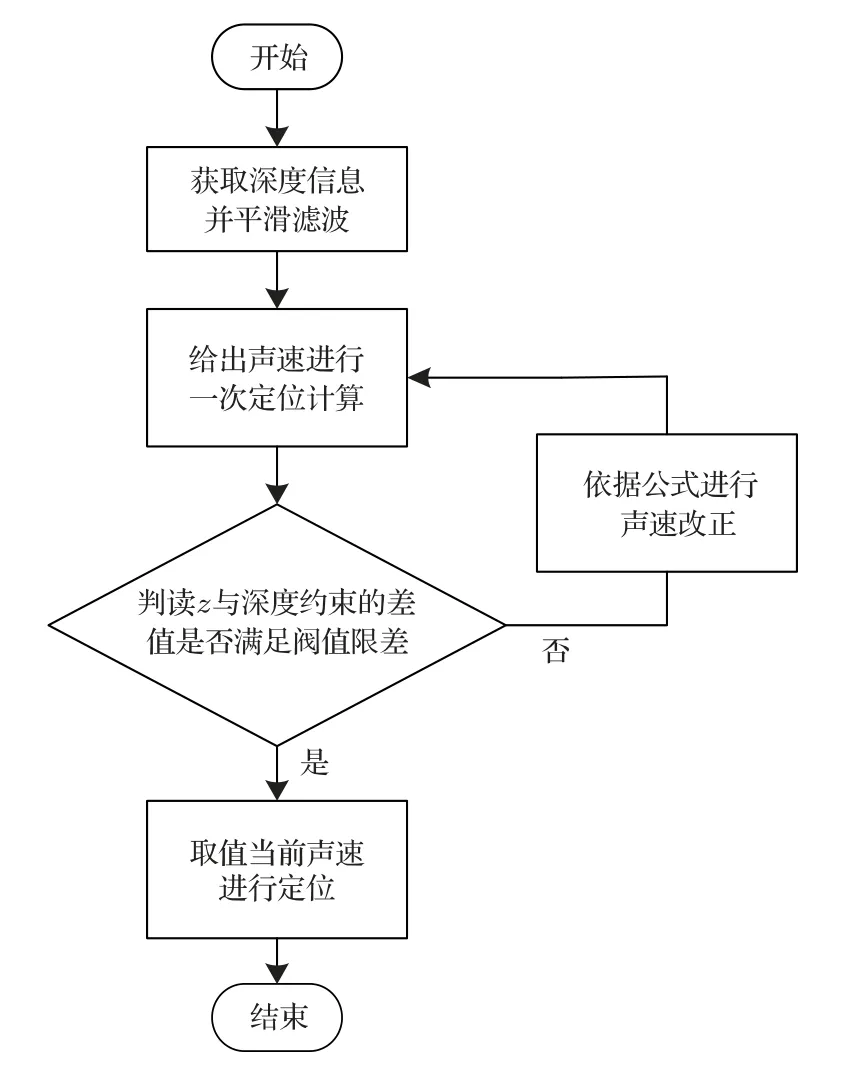
圖3 技術(shù)流程圖Fig.3 Technical flow chart
3 仿真算例及結(jié)果分析
模擬四個(gè)浮標(biāo)布設(shè)成正方形,浮標(biāo)中心間距模擬為4000 m。海面波浪運(yùn)動(dòng)模擬為2 m 的余弦波動(dòng)。海底模擬的應(yīng)答器A 的坐標(biāo)為(500 m,500 m,?2000 m),此外還布設(shè)了B(0,500 m,?2000 m)、C(0,0,?2000 m)、D(500 m,0,?2000 m)三個(gè)應(yīng)答器,浮標(biāo)及應(yīng)答器位置如圖4所示。模擬水域?qū)崪y(cè)聲速剖面為編號(hào)241911 的HM2000 型Argo 浮標(biāo)獲取的南海聲速剖面,聲速結(jié)構(gòu)如圖1所示,用與驗(yàn)證本文方法和計(jì)算其他方法聲速值。實(shí)驗(yàn)?zāi)M誤差,設(shè)置偶然誤差方面換能器定位中誤差各方向?yàn)?0 cm,應(yīng)答器時(shí)延誤差5 cm,系統(tǒng)誤差模擬參考文獻(xiàn)[19–20]中的方法。
由于波浪潮汐的作用,獲取到的深度是波動(dòng)的,根據(jù)平滑濾波公式(3)濾波之后,可得一個(gè)穩(wěn)定的深度信息,如圖5所示,濾波后深度為2000.084 m。
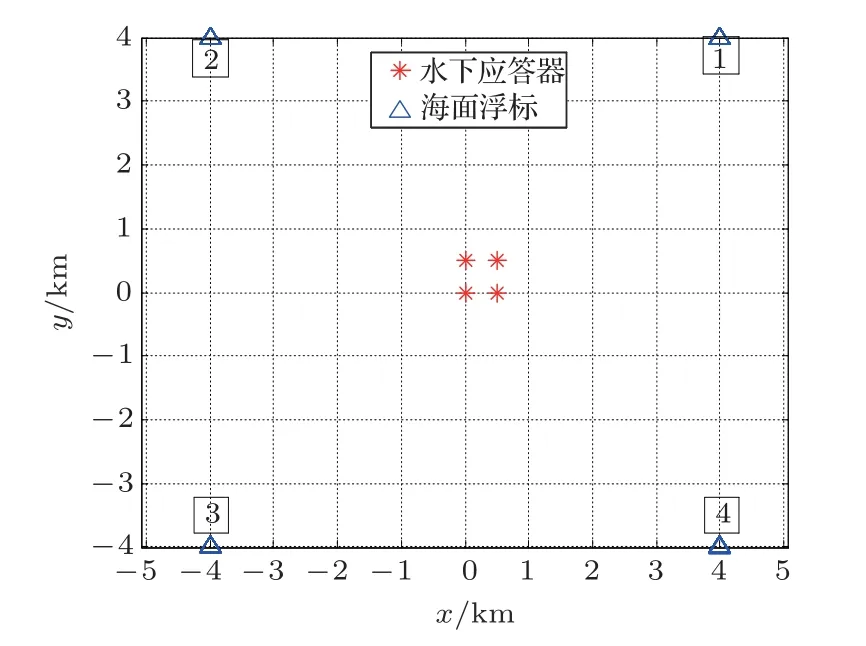
圖4 浮標(biāo)及水下目標(biāo)模擬位置示意圖Fig.4 Buoy and underwater target simulation position
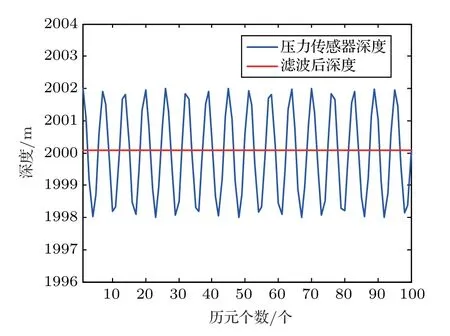
圖5 壓力傳感器深度及濾波后深度Fig.5 Pressure sensor depth and post-filter depth
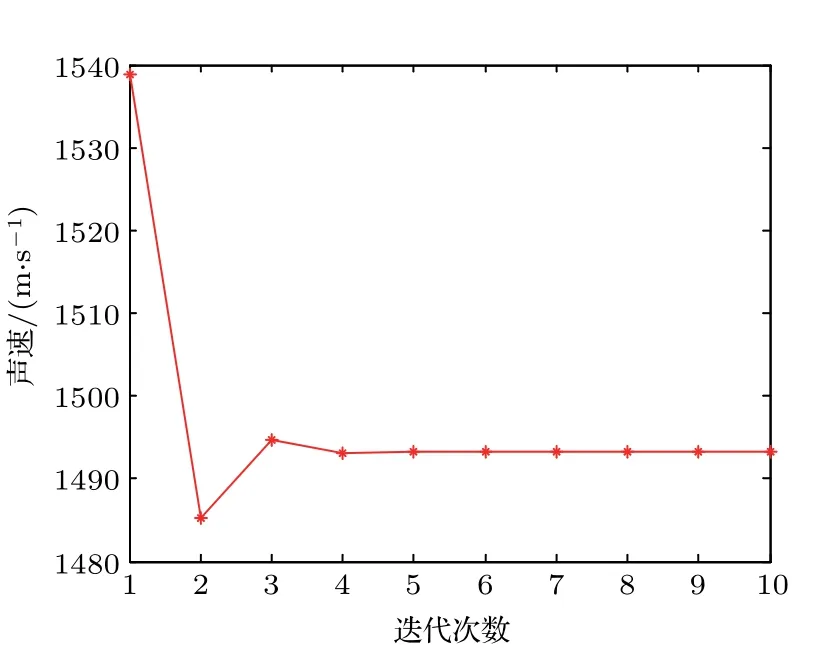
圖6 各迭代次數(shù)聲速值Fig.6 Sound speed of each iteration
初始計(jì)算時(shí)聲速為表層聲速1538.903 m/s,ε值的設(shè)定為0.001,即計(jì)算的深度與實(shí)際深度約束給出的差值在±1 mm 范圍內(nèi)時(shí)的聲速為最終估計(jì)聲速。選取浮標(biāo)1 和水下目標(biāo)A 進(jìn)行估算,表1和圖6表示了每次迭代中的聲速改正值及聲速的變化曲線。從表1可以得出,經(jīng)過(guò)10次迭代聲速趨于穩(wěn)定,前四次迭代中,聲速的改正數(shù)比較大,說(shuō)明此時(shí)與實(shí)際有效聲速相差比較大,隨著迭代次數(shù)的增加,聲速越來(lái)越接近實(shí)際有效聲速,改正數(shù)值逐漸減少,最終迭代終止聲速為1493.534 m/s,在圖6中也可以看出,當(dāng)?shù)螖?shù)到達(dá)5 次以后時(shí),聲速曲線波動(dòng)較小,近乎平直,改正值在0.1 m/s內(nèi)。
表2記錄的是每次迭代次數(shù)中水下應(yīng)答器坐標(biāo)與其真值的差值,可以看出隨著迭代次數(shù)的增加,計(jì)算的深度與實(shí)際深度平面之間的差值越來(lái)越小,逐步收斂滿足限差要求。結(jié)合表1可以看出,在每次的迭代計(jì)算中若計(jì)算的深度值大于實(shí)際深度值時(shí),聲速的改正為負(fù)數(shù);若計(jì)算深度值小于實(shí)際的深度值時(shí),改正為正數(shù),驗(yàn)證了本文方法思路是正確有效的。
為了驗(yàn)證最終估計(jì)聲速是否滿足定位需求,將本文方法所得聲速與加權(quán)平均聲速法、泰勒級(jí)數(shù)展開(kāi)法、等效聲速法對(duì)四個(gè)水下應(yīng)答器的定位結(jié)果進(jìn)行了比較,分別統(tǒng)計(jì)每個(gè)浮標(biāo)X、Y、Z方向上相對(duì)于坐標(biāo)真值的差異?X、?Y、?Z,結(jié)果如圖7所示。同時(shí)計(jì)算了四種方法的定位均方根(Root mean square,RMS)值。本文方法定位結(jié)果的RMS為0.671 m,加權(quán)平均聲速法、泰勒級(jí)數(shù)展開(kāi)法、等效聲速法三種方法的RMS 分別為1.523 m、0.723 m、0.885 m。從均方根大小以及圖7可以得出本文提出的方法所估計(jì)的聲速滿足定位需求,定位結(jié)果優(yōu)于其他三種方法。其中水平XY方向的定位精度與泰勒級(jí)數(shù)展開(kāi)方法、等效聲速法接近,遠(yuǎn)高于加權(quán)平均聲速法的定位結(jié)果,在垂直Z方向上,由于本文方法使用了深度約束,垂直方向定位精度遠(yuǎn)高于其他三種方法。

表1 各迭代次數(shù)后聲速值Table1 Sound speed after each iteration

表2 迭代次數(shù)中各方向坐標(biāo)與實(shí)際坐標(biāo)差值Table2 Difference between the estimated position and the actual
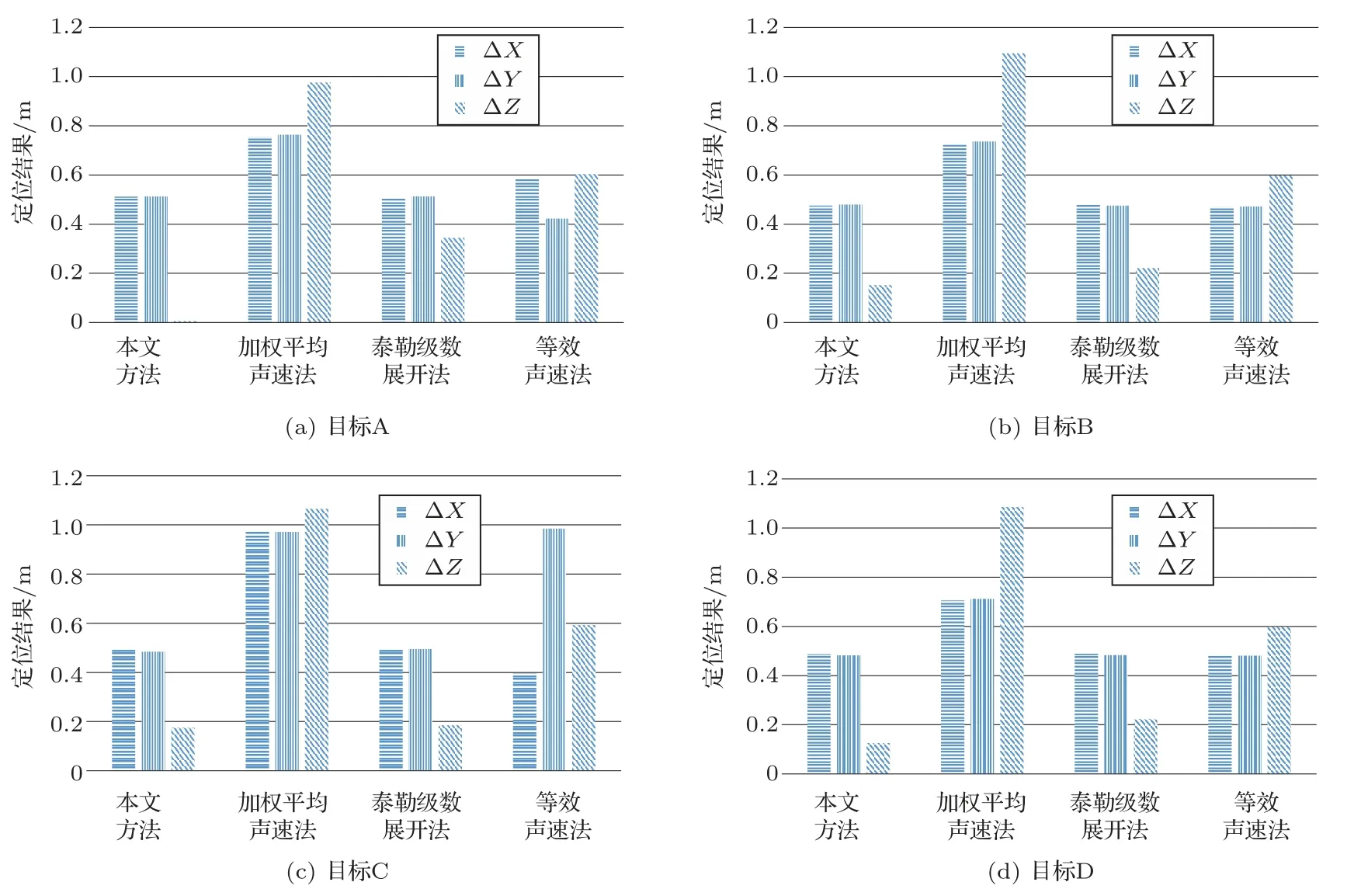
圖7 仿真定位結(jié)果比較Fig.7 Comparison of simulation positioning results
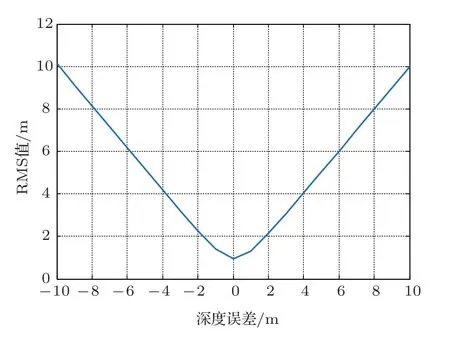
圖8 約束深度與定位誤差關(guān)系Fig.8 Relationship between constraint depth and positioning error
在實(shí)際測(cè)量中,由于儀器精度或外界環(huán)境的影響,獲取的作為約束的深度并不總是精確的。為了確定定位誤差與約束深度誤差之間的關(guān)系,設(shè)定模擬的測(cè)深誤差在±10 m 之內(nèi),得到定位RMS 值隨深度誤差變化的曲線,如圖8所示。從圖8中可以看出,定位誤差隨深度誤差的增大而增大,兩者近似為正比例的線性關(guān)系。結(jié)合圖6及表2數(shù)據(jù)可以推斷,這是由于深度誤差造成了估計(jì)聲速的誤差,而估計(jì)聲速誤差對(duì)Z方向坐標(biāo)影響遠(yuǎn)大于XY方向。
4 實(shí)測(cè)驗(yàn)證與結(jié)果分析
實(shí)測(cè)數(shù)據(jù)采用青島靈山島附近海域?qū)嶒?yàn)數(shù)據(jù)(N35?46′42′′,E120?12′57.91′′)。數(shù)據(jù)采集記錄時(shí)間為2017年12月1日8點(diǎn)–10點(diǎn)。船上搭載有電羅經(jīng)、GPS、測(cè)深系統(tǒng)、聲速剖面儀(CTD)及聲學(xué)定位系統(tǒng),測(cè)區(qū)水深約24 m,水下布置單信標(biāo)。采用“走航式”觀測(cè)手段,以信標(biāo)為中心進(jìn)行“畫圓”與“畫十字”觀測(cè),采樣間隔為2 s。聲速剖面采樣間隔為0.3 m,采集的聲速用于驗(yàn)證文章方法和計(jì)算對(duì)照方法的聲速值。圖9和圖10 分別表示實(shí)驗(yàn)區(qū)測(cè)量船GPS 航行軌跡、應(yīng)答器位置及區(qū)域聲速剖面。
對(duì)原始觀測(cè)文件進(jìn)行數(shù)據(jù)處理后,分別計(jì)算加權(quán)平均聲速法、泰勒級(jí)數(shù)展開(kāi)法、等效聲速剖面法和本文方法所得到的聲速,其中等效聲速剖面法使用表層聲速C0及等效梯度g來(lái)表示。將坐標(biāo)解算值與實(shí)測(cè)結(jié)果(作為坐標(biāo)真值)進(jìn)行偏差比較,表3給出了單點(diǎn)解算坐標(biāo)偏差統(tǒng)計(jì)結(jié)果。
從表3可以看出,在平面XY兩方向的精度方面,四種方法的精度接近;由于本文方法使用測(cè)試區(qū)水深作為約束條件,Z方向的精度明顯高于其他三種方法。四種方法的RMS 差值不大,最大約為0.07 m,分析這是由于測(cè)試區(qū)的最大水深為24 m左右,淺水區(qū)的聲線對(duì)應(yīng)聲程較短,與聲速有關(guān)的誤差遠(yuǎn)沒(méi)有深海區(qū)顯著,理論上本文方法在深水區(qū)的聲學(xué)定位中優(yōu)勢(shì)會(huì)更為突出,但具體性能表現(xiàn)還須后續(xù)深海數(shù)據(jù)驗(yàn)證。
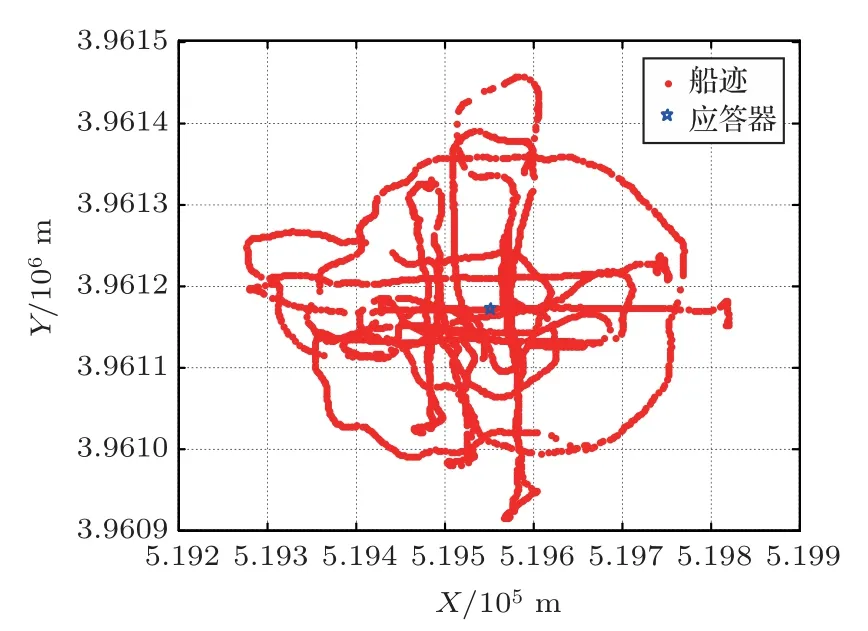
圖9 測(cè)量船軌跡及應(yīng)答器位置Fig.9 Ship trace and transponder’s position
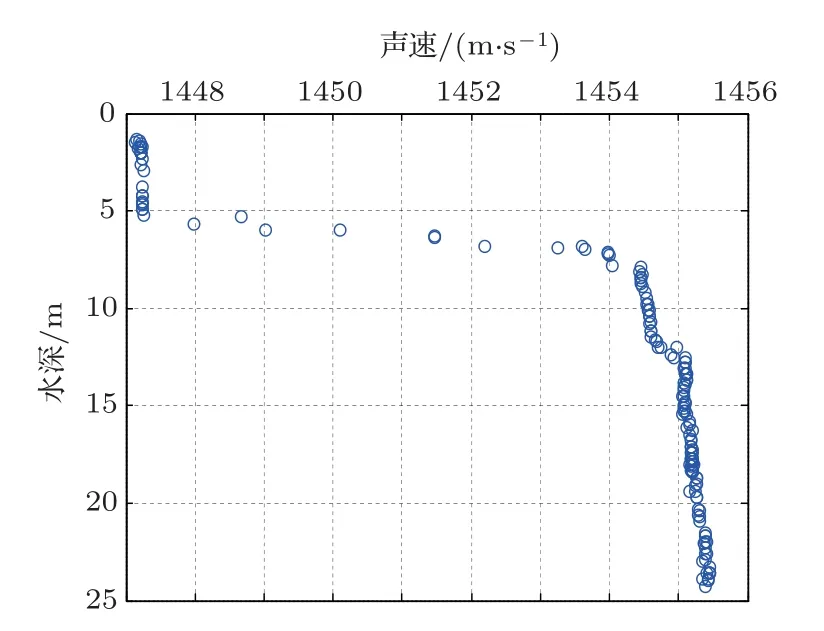
圖10 測(cè)試區(qū)聲速剖面Fig.10 Sound velocity profile of the test area
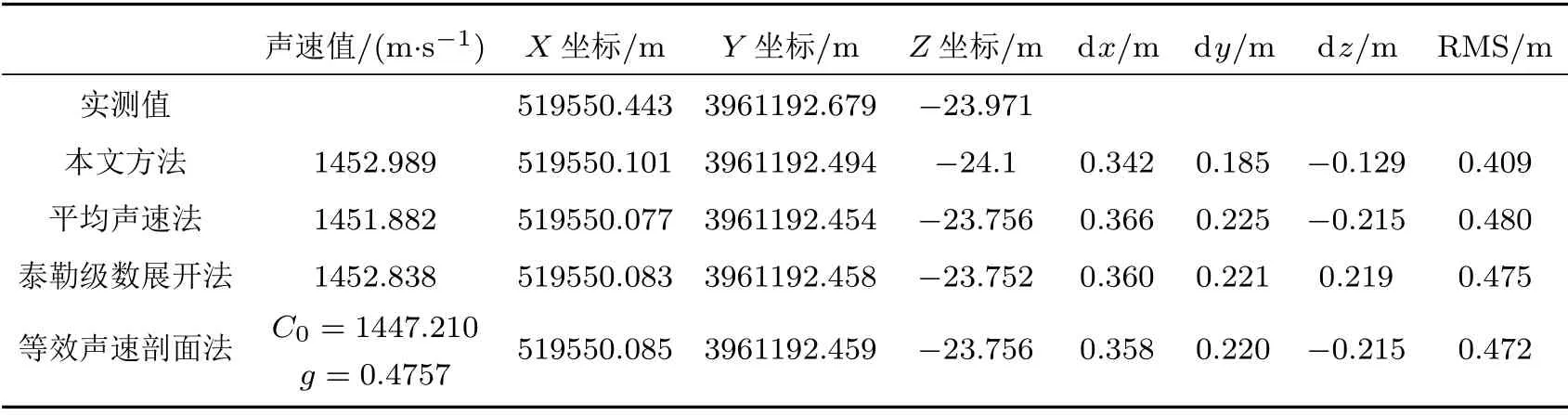
表3 解算結(jié)果偏差統(tǒng)計(jì)Table3 Calculation results statistics table
5 結(jié)論
本文提出了一種基于深度約束的無(wú)聲速剖面的有效聲速估計(jì)方法,其最后求取到是聲源至應(yīng)答器之間的一種平均聲速。通過(guò)實(shí)驗(yàn)驗(yàn)證了該方法可行,所得估計(jì)聲速滿足定位要求,理論上該方法可不需要獲取聲速剖面信息,減少聲速剖面儀的使用;也可根據(jù)歷元觀測(cè)進(jìn)行聲速實(shí)時(shí)調(diào)整,在實(shí)際生產(chǎn)中節(jié)約成本,減少重復(fù)勞作。
此外本文仍有以下幾點(diǎn)探討與說(shuō)明:
(1)文章方法基于測(cè)量的深度進(jìn)行聲速估計(jì),對(duì)于深度獲取的精度依賴較高,最終獲取的聲速及定位誤差會(huì)隨著測(cè)量深度誤差的增大而增大。
(2)由于本文方法的有效性建立在實(shí)驗(yàn)室仿真實(shí)驗(yàn)與淺海實(shí)驗(yàn)數(shù)據(jù)驗(yàn)證上,還有待進(jìn)一步深海實(shí)測(cè)數(shù)據(jù)驗(yàn)證。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
新聞傳播(2015年10期)2015-07-18 11:05:40
