模糊PID控制器的設計
2019-11-27 02:40:14李珍珍朱浩銘
通信電源技術 2019年11期
李珍珍,朱浩銘
(1.廣西大學 電氣工程學院,廣西 南寧 530004;2.南寧學院 機電與質量技術工程學院,廣西 南寧 530200)
1 PID控制器的結構與原理
PID控制算法中P(Proportional)指的是比例環節,其作用是將控制系統中產生的偏差信號成比例地反映出來,以達到當偏差一旦產生就可進行控制;I(Integral)指的是積分環節,其作用是消除系統靜差并提高系統的無差度;D(Differential)指的是微分環節,其作用是加快系統的動作速度,減少調節時間[1]。
PID控制器作為一個常見且應用廣泛的線性控制器[2],其結構如圖1所示。
2 模糊控制的原理與模型
模糊控制是一種智能控制,其結構上的組成類別和計算機控制系統有一定的相似性,類同于常見的離散控制系統[3],其模糊控制系統的結構如圖2所示。

圖1 PID控制器的結構圖
基于模糊控制的系統組成主要有4部分。

圖2 模糊控制系統的結構圖
(1)輸入/輸出的接口裝置,常用的是模/數(A/D)、數/模(D/A)轉換。對于輸入裝置中使用A/D轉換,目的在于使控制器可以通過接口獲取離散信號;對于輸出裝置中使用D/A轉換,目的是將離散信號轉換為連續信號,便于送達于下位機,并控制被控對象。除了常見的A/D、D/A轉換外,還會使用電平轉換裝置等。
(2)模糊控制器是實現模糊控制技術的關鍵核心部分。
(3)廣義上的被控對象包括被控對象和下位機執行機構。
(4)傳感器的作用是將不易檢測的物理信號轉化為容易檢測的電信號,并傳輸回上位機,形成一個閉環回路,構成閉環系統。
模糊控制器的內部結構[4]如圖3所示。

圖3 模糊控制器的結構圖
模糊控制器可簡單區分為一維控制器、二維控制器、三維控制器以及多輸入的多維控制器等,一到三維的模糊控制器的結構以及輸入與輸出之間的關系如圖4所示。

圖4 一到三維的控制器結構
3 模糊PID控制器的設計
模糊PID控制器的系統結構如圖5所示[5]。模糊控制器把誤差e與將其求導后得到的誤差變化ec作為雙輸入端,把比例系數KP、積分系數Ki、微分系數Kd作為三輸出端;其工作原理為將e與ec輸入進模糊控制器進行模糊推理運算,在得出KP、Ki、Kd后,將結果傳到PID控制器中運算。誤差e也作為輸入端進入PID控制器運算,最終通過綜合運算得出輸出量C[6]。
4 模糊PID下的仿真實驗與數據
在MATLAB的命令行窗口中輸入“fuzzy”一詞,即可打開MATLAB中的模糊邏輯工具箱。根據實際要求更改輸入和輸出的個數,由于模糊控制器由誤差e與誤差變化量ec作為模糊控制器的輸入變量,而KP、Ki、Kd作為模糊控制器的輸出變量,故選用雙輸入三輸出的結構,如圖6所示。
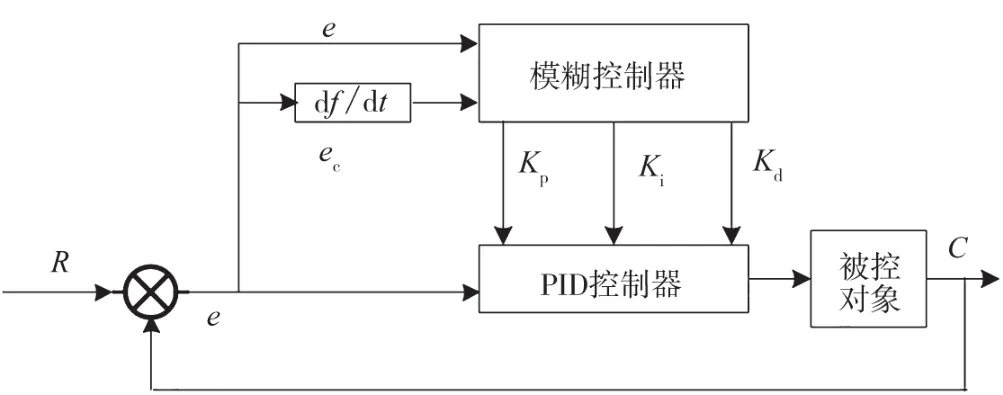
圖5 模糊PID控制器的結構圖

圖6 模糊邏輯工具箱界面
將設置好的模糊控制器應用在Simulink中,選擇好模塊后即可以獲得模糊PID的仿真模型結構[7],如圖7所示。

圖7 模糊PID系統Simulink仿真結構圖
PID控制器選用的參數整定方法是Chien-Hrones-Reswick整定法。給予該系統一個階躍函數[8],得到的仿真結果如圖8所示。
由圖8可知,模糊PID控制系統與系統自身的傳遞函數、普通的PID控制器控制結果相比,其超調量明顯更小、調節時間更短,從而更快進入穩態,且得到的仿真波形在調節時間內的波動更少等[9]。
5 結 論
本文設計復合型的模糊PID控制器,多端變量輸入,經實驗仿真論證了本設計擁有實際使用的可行性、調節時間更短及波形波動更少等特點。

圖8 模糊PID控制器的仿真結果
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01