基于模糊PID的電動靜液作動器位置控制系統
2018-05-04 03:35:13祁曉野
自動化與儀表 2018年4期
任 彬,祁曉野
(北京航空航天大學 機械工程及自動化學院,北京 100191)
電動靜液作動器EHA是一種新型伺服作動器,為新型功率電傳飛控系統的重要組成。與傳統液壓作動系統相比,EHA系統具有響應速度快、集成度高、功重比大、可靠性高、效率高等優點。目前已廣泛應用于航空、航天、艦船、地面武器裝備等領域。
電動靜液作動器的工作環境復雜多變,還受死區、滯環等非線性因素的影響。顯然,電動靜液作動器系統具有非線性時變性和不確定性等特點,常規的PID控制往往不能滿足控制要求,為此,文中提出一種基于模糊PID的位置系統控制方法,提高系統的穩定性、快速性和準確性[1]。
1 系統組成及工作原理
電動靜液作動器根據液壓泵和電機控制方式的不同,分為定排量變轉速控制、變排量定轉速控制和變排量變轉速控制3種。定排量變轉速方式由于結構簡單、效率高等因素,成為最常見的形式。在此EHA系統采用定排量變轉速方式的結構。
電動靜液作動器位置系統的整體結構如圖1所示,其主要由驅動控制器、功率驅動單元、直流無刷電機BLDC、軸向柱塞變量泵、單向閥、蓄能器、阻尼旁通閥、溢流閥、作動筒(雙作用對稱液壓缸)等組成。

圖1 電動靜液作動器位置系統整體結構Fig.1 Overall structure of position system of electric hydrostatic actuator
系統工作時,將從上位機獲取位置指令,與實際位置反饋值做差,得到位置偏差值,驅動控制器進行運算后輸出相應控制信號,電機在控制信號作用下帶動柱塞泵輸出不同大小的流量,進而使得液壓缸活塞桿的位置發生改變,實現作動器位置系統的精確控制[2]。
電動靜液作動器位置系統由3個閉環構成,從外向內分別為位置控制環、速度控制環、電流控制環。三環控制原理如圖2所示。
2 系統模型建立及特性分析
為了便于分析,將一些對系統影響較小的因素不予考慮,做如下假設:①電機模型為理想線性模型;②油液黏度和體積彈性模量均為常數;③管道壓力損失、流體質量影響及管路動態在建模時不予考慮。
根據系統的控制原理,在AMESim中分別對系統各個環節進行建模,然后聯立各個環節,最終進行系統建模,如圖3所示[3]。
通過查閱相關硬件的技術手冊,以及現場試驗數據,確定了模型參數。模型參數及其取值如下:
R為BLDC定子繞組電阻,R=0.245 Ω;
L為BLDC定子繞組電感,L=3.36×10-4H;
Cm為BLDC電磁轉矩系數,Cm=0.215 N·m/A;
Ce為 BLDC 反電勢系數,Ce=0.215 V·s/rad;
J 為電機-泵轉動慣量,J=1.6×10-3kg·m2;
B 為電機-泵阻尼系數,B=6.0×10-4N·m·s/rad;
Cip為泵內泄漏系數,Cip=2.0×10-12m3/(s·Pa);
Cep為泵外泄漏系數,Cep=0.5×10-12m3/(s·Pa);
A為作動筒活塞有效面積,A=1.83×10-3m2;
V為系統容腔總容積,V=3.0×10-4m3;
Cig為作動筒內泄漏系數,Cig=2.0×10-12m3/(s·Pa);
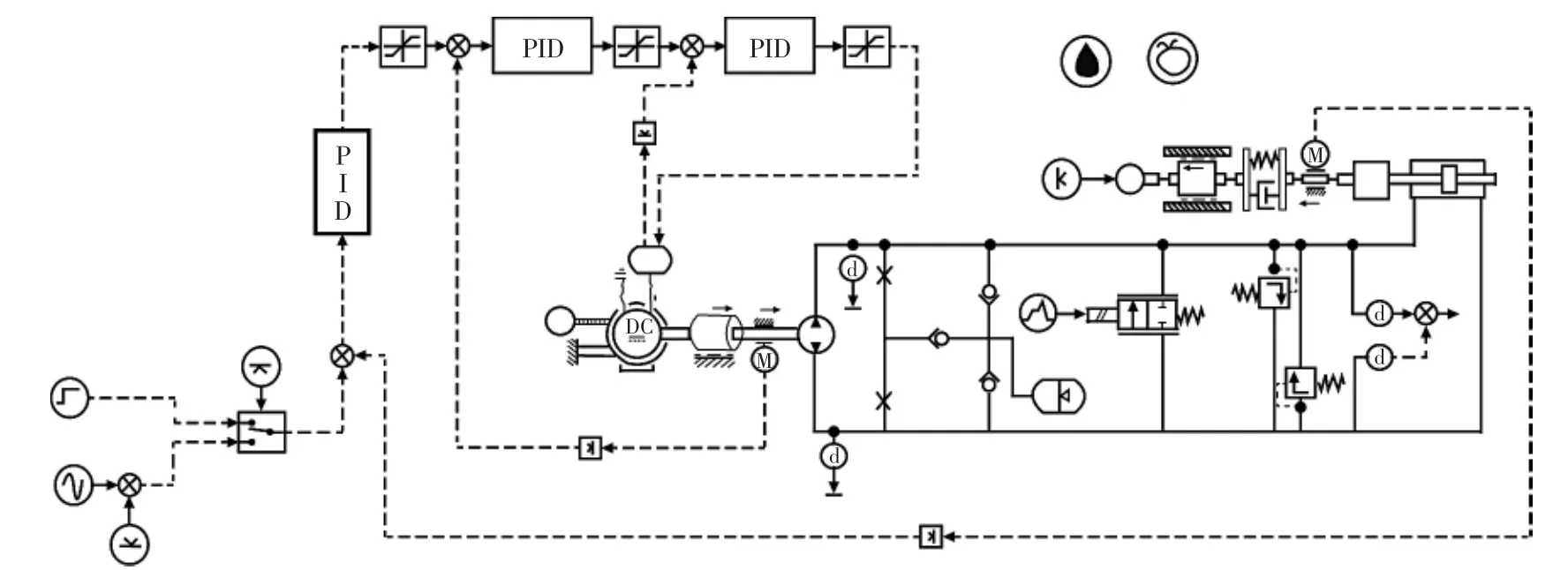
圖3 電動靜液作動器位置系統建模Fig.3 Modeling of position system of electric hydrostatic actuator
Ceg為作動筒外泄漏系數,Ceg=0.5×10-12m3/(s·Pa);
Ey為液壓油體積彈性模量,Ey=6.86×10-8N/m2;
Bt為活塞及負載的阻尼系數,Bt=100 N·s/m;
Kt為負載彈簧剛度,Kt=5×10-8N/m;
mt為活塞及負載的慣性質量,mt=30 kg;
Z為泵柱塞數,Z=9個;
Fz為泵柱塞橫截面積,Fz=3.85×10-5m2;
mz為泵柱塞質量,mz=3.5×10-3kg;
α為斜盤轉軸與缸體軸線之間的徑向間距,α=3.3×10-4m;
Rf為泵柱塞回轉半徑,Rf=1.3×10-2m。
將上述模型參數帶入模型中進行仿真。在優先滿足快速的原則下,不斷修正PID參數進行仿真,直至系統響應曲線達到最佳。系統在輸入指令為5 mm階躍信號的條件下得到的仿真曲線如圖4所示。

圖4 電動靜液作動器位置系統動態響應曲線Fig.4 Dynamic response curve of position system of electric hydrostatic actuator
根據需求,系統需滿足以下控制要求:伺服機構行程的絕對值≮50 mm;階躍響應的上升時間≯0.19 s;在全行程內階躍響應超調量<5%。
從響應曲線來看,系統階躍響應的上升時間為0.223 s,未超調量。表明系統阻尼比較大,相對穩定性高,但是快速性還有帶提高,單純的PID控制不能滿足項目需求。
3 模糊PID控制器的設計
模糊控制器可用于數學模型復雜多變或者精確數學模型不易獲得的系統,同時具有響應快、魯棒性好、可滿足多變載荷等特點。傳統PID控制器算法簡單、穩定性好、可靠性高,但適用范圍較小。將模糊控制和PID控制相結合,可以根據不同情況,完成對PID參數的不斷在線調整,充分發揮這2種算法的優勢,提高系統的控制效果[4]。
根據采樣計算得到的誤差和誤差變化率,運用經驗得到的模糊推理規則,建立比例系數、微分系數、積分系數模糊控制規則表,達到實時在線調整的效果。模糊PID控制器結構如圖5所示。
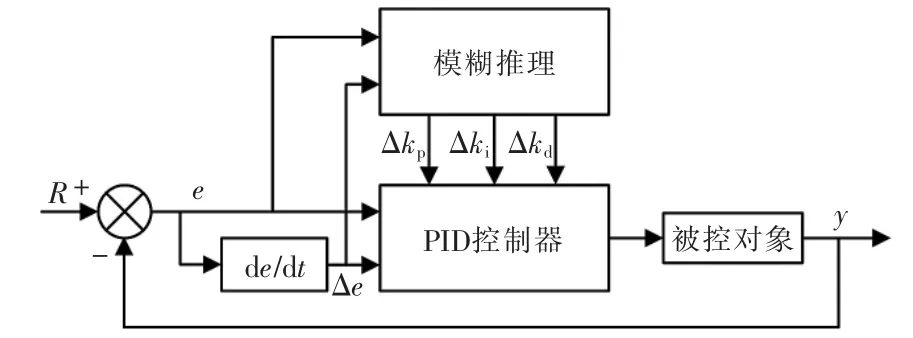
圖5 模糊PID控制器結構Fig.5 Fuzzy PID controller structure
由圖可見,模糊PID控制器的設計總體分為兩大部分,模糊控制器設計和PID控制器設計。針對該位置系統,圖中e,Δe為位置偏差和位置偏差的變化率;Δkp,Δki,Δkd為經過模糊推理后的輸出量。系統運行中,當偏差和偏差變化率發生變化時,根據模糊控制規則,輸出量也隨之調整,最終根據規則(1)調整 PID參數值,即

式中:kp′,ki′,kd′為初始參數。
3.1 模糊控制器設計
一個基本模糊控制器主要有3個部分:
模糊化 把精確量 (如偏差e和偏差變化Δe)轉化為相應的模糊量(E和ΔE);
模糊推理 按總結的語言規則(模糊控制規則表)進行模糊推理;
模糊判決 把推理結果從模糊量轉化為可以用于實際控制的精確量 Δkp,Δki,Δkd。
定義 E和 ΔE模糊量的子集為{NB,NM,NS,ZO,PS,PM,PB},模糊論域為[-6,6];kp,ki,kd模糊量子集為{NB,NM,NS,ZO,PS,PM,PB},論域分別為[-10,10],[-0.5,0.5],[-1,1],各模糊子集均選用三角形隸屬函數。其具有形狀簡單、響應靈敏、魯棒性強等優點。
在Matlab環境中輸入Fuzzy,即可調出模糊控制系統呢編輯器的交互界面,如圖6所示。它提供了對模糊系統的高層屬性的編輯、修改功能,這些屬性包括輸入、輸出語言變量的個數和去模糊化方法等。
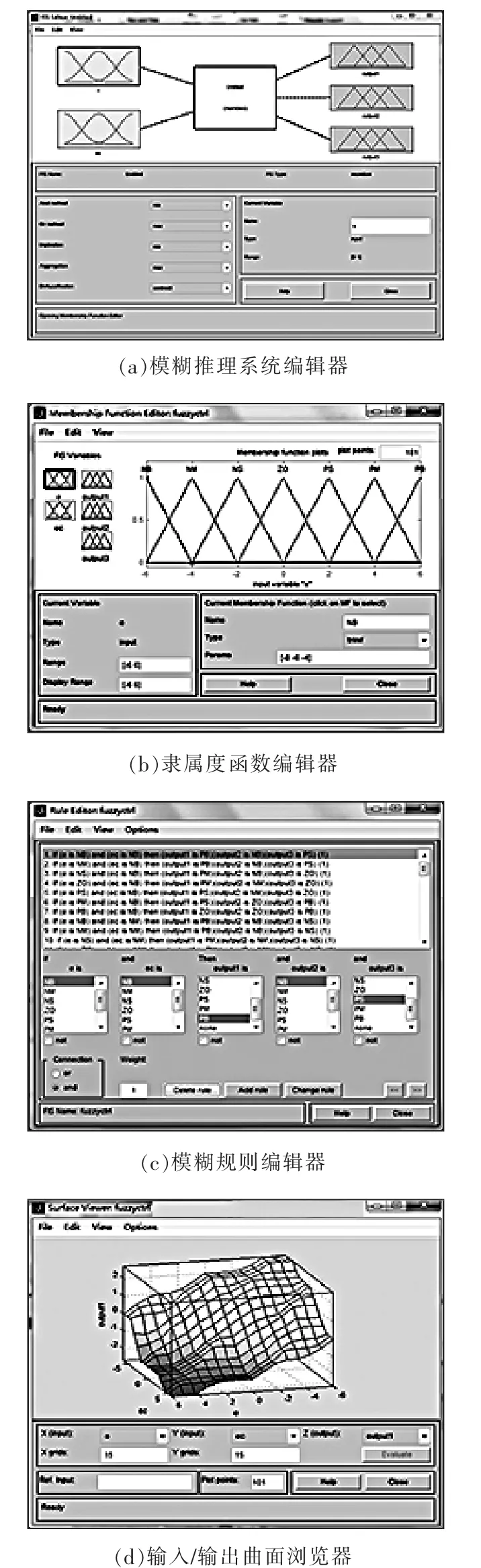
圖6 模糊控制器相關編輯器Fig.6 Fuzzy controller related editor
3.2 模糊控制規則和模糊推理
通過人工調試,結合理論分析,可以歸納出偏差e,偏差變化率Δe與PID調節器的3個參數kp,ki,kd存在以下關系:
(1)當位置偏差較大時,需要加快系統的響應速度,所以選取較大的kp值,但是過大的kp數值會導致系統不穩定。為避免系統在開始時可能引起的范圍控制作用,應選取較小的kd,以便加快系統響應;為避免積分飽和,可以先去掉積分作用,取ki=0。
(2)當位置偏差處于中等大小時,為使系統的響應超調量降低一些,需要選擇較小的kp。此時,為保證系統的響應速度,kd值的選擇比較重要,故應謹慎選取。積分作用在此時也可加入一些,但ki的數值不宜過大。
(3)當位置偏差較小時,系統逐漸達到穩態,為了使系統具有較好的穩態性能,可以選取較大的kp和ki。為了避免系統在平衡點出現振蕩,kd的取值應恰當。
由上述經驗和實際操作,考慮偏差變化率Δe的影響,綜合得出模糊控制規則[5],見表1。

表1 模糊控制規則Tab.1 Fuzzy control rule
3.3 整體模型的模糊PID仿真及分析
在Matlab/Simulink工具箱中,根據模糊PID控制器結構圖以及PID參數值調整規則,搭建模糊PID控制器模塊,如圖7所示。模糊控制的模糊化、清晰化和模糊控制規則等均封裝在Fuzzy Logic Controler中[6]。

圖7 模糊PID控制器模塊Fig.7 Fuzzy PID controller modules
為使系統更為簡潔,將模糊PID控制器模塊封裝為Fuzzy-PID模塊。調用Simulink中的AMESim Interfaces選項卡,添加AME2SLCoSim,并完成線路連接,在Matlab中聯合仿真模型如圖8所示。圖中,左側方框代表AMESim中所有元件的封裝,input,output,feedback的3個接口可以與Simulink中的元件進行連接。
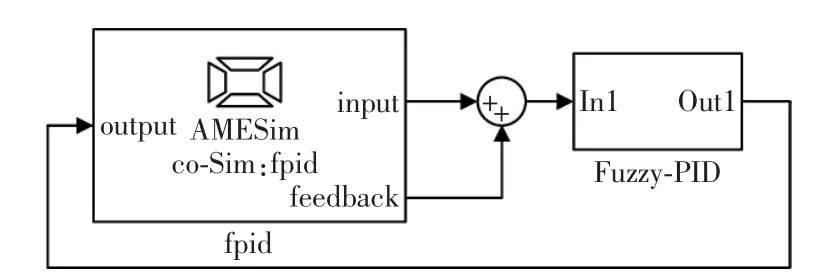
圖8 Simulink中聯仿接口Fig.8 Co-simulation interface in Simulink
在AMESim中聯合仿真模型如圖9所示。圖中,左側方框代表Simulink中所有元件的封裝,input,output,feedback 的 3 個接口可以與 AMESim中的元件進行鏈接。
在輸入指令為5 mm的階躍位移條件下對系統進行了仿真,得到了如圖10所示的仿真結果。由仿真曲線可見,常規PID控制策略控制下,系統位移量的上升時間為0.223 s,無超調量;應用模糊PID控制策略后,系統位移量的上升時間為0.175 s,無超調量。
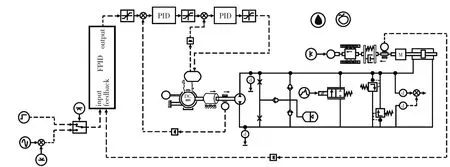
圖9 整體聯仿模型及AMESim中聯仿接口Fig.9 Overall simulation model and the co-simulation interface in AMESim
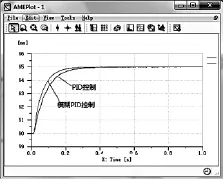
圖10 動態響應曲線對比Fig.10 Comparison of dynamic response curves
對比可見,在模糊PID控制策略下,系統的階躍響應上升時間提高了21.5%,快速性得到了改善,滿足項目的需求指標。
4 結語
針對電動靜液作動器的位置控制系統進行了研究,詳細說明了系統的工作原理,并利用Simulink和AMESim軟件進行了模型搭建,仿真分析了系統特性。根據系統特性和項目要求,提出了模糊PID的控制方法,通過該方法使得系統性能得到了改善,滿足了項目使用需求。
參考文獻:
[1] 李楊,周潔敏.電動靜液作動器的建模與仿真[J].南昌航空大學學報:自然科學版,2014,28(3):38-44.
[2] 齊海濤,付永領.基于AMESim的電動靜液作動器的仿真分析[J].機床與液壓,2007,35(3):184-186.
[3] 付永領,祁曉野.AMESim系統建模和仿真:從入門到精通[M].北京:北京航空航天大學出版社,2006.
[4] 王廣懷,周傳海,呂萍,等.模糊PID控制器在直驅式電液伺服系統中的應用[J].機床與液壓,2010,38(21):85-87.
[5] 石辛民,郝整清.模糊控制及其MatLab仿真[M].北京:清華大學出版社,2008.
[6] Yu L K,Zheng J M,Yuan Q L,et al.Fuzzy PID control for direct drive electro-hydraulic position servo system[C]//International Conferce on Consumer Electronics,Communications and Networks.IEEE,2011:370-373.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19