城市地下河箱涵結構測繪技術研究
2019-11-23 06:00:58楊超斌吳華勇李慶海
城市道橋與防洪 2019年11期
楊超斌,吳華勇,黃 帆,李慶海
(上海市建筑科學研究院,上海市200032)
0 引 言
城市河流、疏浚或排水等通道除了明挖河道,也常暗埋有地下河,地下河主體結構常采用單箱單室或多室的密閉框架箱涵結構形式[1]。
地下河箱涵結構因為其暗埋的屬性,在運營年限較長后,其周邊環境與原始情況必然存在較大出入,尤其鄰近箱涵的保護區范圍內不可避免地存在非法搭建、不正當施工現象,都會對箱涵的運營安全造成不利影響。為此需要對暗埋箱涵的地下準確位置及走向、對應的地上周邊環境等參數進行測繪,排查可能影響箱涵正常工作的安全隱患,通過建模分析箱涵上部荷載變化情況,從而進一步保證箱涵的安全使用。
為解決上述難題,需綜合運用無人機航空攝影測量、RTK 測量、3D 掃描等先進技術。文中依托典型的實際工程案例進行了較為系統的闡述,研究成果可為后續開展此類結構測繪工作提供一定的參考借鑒依據。
1 工程概況
上海市楊浦區楊樹浦港-虬江水系地下河箱涵段位于國定路和密云路之間,全長2120 m,建于20 世紀80 年代,暗埋箱涵段為復旦大學校區地下的一條暗河,河水從東走馬塘流入涵洞,經過箱涵匯入虬江。
暗埋段箱涵結構形式為單箱三室鋼筋混凝土結構,結構橫斷面如圖1 所示。地下河箱涵已長期運營了30 多年,材料老化、退化,加上污水對結構的長期腐蝕侵害,使結構出現不同程度的缺陷和損傷,特別是箱涵結構的位置走向及其地面周邊環境的變遷應進行準確的勘察測繪,以評定地形地貌的變化對箱涵結構受力的影響,綜合分析箱涵結構運營現狀,從而分析評定結構安全。

圖1 箱涵結構橫截面(單位:mm)
2 主要技術手段和方法
2.1 無人機進行周邊環境調查
通過無人機航空攝影測量技術對箱涵沿線的地形、地貌進行實景建模,排查可能影響箱涵正常工作的安全隱患。通過無人機航空攝影測量技術獲得箱涵沿線地表的三維影像數據,可量化分析箱涵沿線附近一定范圍內地形地貌的變化,查看箱涵附近是否有工程施工等不利因素[2]。將箱涵上方的地物地貌建模后,可形成立體化的三維坐標可視化數據,并結合箱涵結構整體3D 掃描成果,對箱涵對應地表的高程和覆土厚度進行分析擬合,對箱涵的結構受力分析提供可靠的數據。
無人機航空攝影測量技術的工作流程及詳細技術路線如圖2 所示。還應輔以人工巡查方式,組建巡查小組,通過對箱涵沿線巡視,輔以拍照、攝像、記錄等方式對周邊環境進行詳細調查,對存在的風險點加以梳理分析,并重點排摸。

圖2 無人機外業飛行技術路線
2.2 暗埋箱涵結構走向定位測量
2.2.1 測點布設
導線控制網以箱涵工作井外GPS RTK 所測的控制點為起算數據,沿箱涵行進路線布設一條導線,組成如圖3 所示的附合導線。
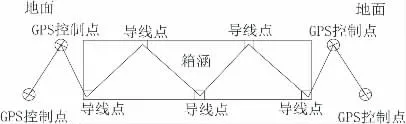
圖3 導線控制網示意圖
箱涵內導線點需布設強制對中臺,高度約1.8~2.0 m,相鄰對中臺之間間距約50 m,對于全長2120 m 的箱涵段約布設42 個強制對中臺。
實地布設時應注意下列幾點:一是相鄰點間通視良好,便于測角和量距,即確保每一個導線點與相鄰導線點通視,以便后視定向、校核;二是點位應布設強制對中臺,做好標志,便于安置儀器;三是導線相鄰邊長之比不宜大于1∶3;四是導線點應有足夠的密度,分布較均勻,便于控制整個測區。
2.2.2 外業觀測
由于測量作業區域的特殊性,以及為了合理安排作業時間,導線測量分兩部分觀測:一是箱涵工作井外地面控制測量,在每個箱涵工作井外設置2~3 個地面控制點,采用GPS RTK 方法施測。導線觀測前,預先解算地面GPS 控制點之間的邊長,施測過程中首先用全站儀檢驗控制點的精度,滿足要求后進行導線測量。注意在觀測中,必須觀測GPS 控制點間的連接角和連接邊,作為傳遞坐標方位角和坐標之用。二是箱涵內導線測量,待進入箱涵作業后,從第一個工作井外地面控制點起沿箱涵測至下一工作井地面控制點。箱涵內導線點全部設置在強制對中臺上。
2.3 箱涵內部三維掃描
三維激光掃描技術的出現和發展為空間三維信息的獲取提供了全新的技術手段,為信息數字化發展提供了必要的生存條件。三維激光掃描技術克服了傳統測量技術的局限性,采用非接觸主動測量方式直接獲取高精度三維數據,能夠對任意物體進行掃描,且沒有白天和黑夜的限制,快速將現實世界的信息轉換成可以處理的數據[3]。
采用三維激光掃描技術對箱涵的空間結構進行數據采集、建模,以此來量化箱涵的空間尺寸。采用三維激光掃描技術還可對箱涵表觀結構進行全面數字化,包括精細化斷面和激光影像數據。
為了將所有點云數據及影像資料統一至上海城市坐標系,具體施測時采用APM 絕對定位法。該定位法使用帶兩個棱鏡的特制基座和一個球形棱鏡進行組合定位,使用一臺全站儀在掃描的同時跟測三個棱鏡。現場工作情況如圖4 所示。

圖4 APM 定位法作業示意圖
掃描完成后,可在TMSOffice 軟件中直接使用三個棱鏡的空間坐標進行點云數據的批量配準。APM 定位法的優點是內業拼接工作簡單,外業工作需要一臺全站儀配合。
3 測繪成果
通過無人機航拍測繪,結合箱涵結構整體3D掃描成果,對箱涵對應地表的高層和覆土厚度進行分析擬合,同時對箱涵邊界的建筑物侵入情況進行分析。
本次測繪以松花江路與政修路路口為起點,里程設為0,終點位于國定路和政民路路口,里程約2000 m,全景如圖5 所示。

圖5 箱涵與周邊環境全景

圖6 楊浦地下河箱涵頂部高程及地表地物高程對比曲線圖
根據地表航拍數據和箱涵3D 掃描數據分析,可以得到箱涵地表高程、箱涵頂板高程和箱涵覆土厚度數據。通過周邊環境調查和箱涵測繪結果可以看出,箱涵段主要下穿政修路、復旦大學附屬中學、政肅路、邯鄲路、復旦大學,上方地表主要為城市交通道路、居民樓、綠化空地,地表標高平均高程約為4.76 m,箱涵覆土厚度在0.9~2.3 m。箱涵在地面的投影位置主要與7 幢建筑、2 處綠化空地發生交叉,其中里程500~550 m 附近的4 號建筑上海有聯華宸酒店公寓頂部高程達25.2 m。目前發現正在施工的項目兩處,后續應持續關注箱涵的病害開展及變形情況,關注后期施工是否存在堆載、卸載等工況(見圖6)。
4 結 語
文中依托某城市地下河暗埋箱涵段結構測繪實際工程案例,詳細闡述了該類地下結構測繪的技術方法、實施流程及成果。匯總主要研究成果包括如下幾個方面:
(1)采用三維激光掃描技術對箱涵的空間結構進行數據采集、建模,以此來量化箱涵的空間尺寸,還可以檢測結構的表面損傷。采用三維激光掃描技術可對箱涵表觀結構進行全面數字化處理,包括精細化斷面和激光影像數據,為箱涵的檢測、監測、維護管理提供高效的全面檢測和分析手段。
(2)通過無人機航空攝影測量技術對箱涵沿線的地形、地貌進行實景建模,排查可能影響箱涵正常工作的安全隱患,并結合箱涵結構整體3D 掃描成果,對箱涵對應地表的高程和覆土厚度進行分析擬合。
(3)導線控制網以箱涵工作井外GPS RTK 所測的控制點為起算數據,在每個箱涵工作井外設置2~3 個地面控制點,沿箱涵行徑路線布設一條導線,采用GPS RTK 方法施測。施測過程中首先用全站儀檢驗控制點的精度,滿足要求后進行導線測量,從而完成地下河暗埋箱涵結構的位置走向準確測繪。
(4)航空攝影測量、RTK 測量、3D 掃描等先進技術結合實際工程項目的綜合運用,成功解決了相關工程技術難題,可為后續開展此類結構測繪工作提供一定的參考借鑒依據。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
影視與戲劇評論(2016年0期)2016-11-23 05:26:01