大型空間相機(jī)柔性支撐結(jié)構(gòu)的設(shè)計
2019-11-23 08:46:34汪純鵬劉波
長春理工大學(xué)學(xué)報(自然科學(xué)版) 2019年5期
汪純鵬,劉波
(中國科學(xué)院長春光學(xué)精密機(jī)械與物理研究所,長春 130033)
隨著空間相機(jī)的發(fā)展,不滿足于低分辨率相機(jī)的需求促使其向高分辨率、大口徑、長焦距的方向發(fā)展[1]。高分辨率大型空間相機(jī)意味著其搭載的光學(xué)系統(tǒng)需要更高的精度[2]以及更小的變形輸入,故在光機(jī)系統(tǒng)與衛(wèi)星平臺間采用柔性支撐結(jié)構(gòu),以減少衛(wèi)星平臺由于溫度及裝配精度等產(chǎn)生的變形對光機(jī)系統(tǒng)的影響[3]。基于各類荷載對發(fā)射鏡的三點柔性支撐的經(jīng)典結(jié)構(gòu)[4],以及LMSSC公司空間近紅外相機(jī)的六點柔性結(jié)構(gòu)[5]、韓國空間光學(xué)中心研制的bipod支撐結(jié)構(gòu)[6]及長春光機(jī)所研制的Cartwheel柔性支撐結(jié)構(gòu)[7]的研究,本文設(shè)計了一種大型柔性支撐結(jié)構(gòu),用于連接光學(xué)系統(tǒng)及衛(wèi)星平臺,并通過一定的柔性環(huán)節(jié)隔衰減變形。
本文研究的柔性支撐結(jié)構(gòu)對于大型空間相機(jī)來說,力學(xué)性能基頻不小于15 Hz,強(qiáng)度滿足要求且具有10倍變形衰減能力,對柔性支撐結(jié)構(gòu)的空間布局等相關(guān)參數(shù)進(jìn)行了設(shè)計,并利用仿真進(jìn)行了強(qiáng)度及柔性校核。其結(jié)果表明所設(shè)計的柔性支撐結(jié)構(gòu)可以滿足各項力學(xué)性能要求。
1 柔性支撐結(jié)構(gòu)的設(shè)計
針對某大型空間相機(jī)研制任務(wù),在光學(xué)系統(tǒng)光具座與衛(wèi)星平臺間需設(shè)計一套柔性支撐系統(tǒng)。要求保證光機(jī)系統(tǒng)穩(wěn)定性,減小衛(wèi)星平臺變形影響及互相耦合;同時要求柔性支撐結(jié)構(gòu)保證光學(xué)相機(jī)整體剛度,且滿足動、靜力學(xué)特性要求。且由于衛(wèi)星平臺在使用不同電器時造成不同溫度場的不確定性,故在校核柔性支撐系統(tǒng)時將熱變形轉(zhuǎn)換為干擾位移。針對上述要求對柔性支撐系統(tǒng)提出以下指標(biāo)需求:(1)固有頻率不小于15 Hz;(2)在支撐光學(xué)系統(tǒng)1.2g重力荷載下留有一定安全系數(shù);(3)當(dāng)衛(wèi)星平臺端產(chǎn)生的變形傳遞至主光學(xué)系統(tǒng)光具座時通過柔性環(huán)節(jié)應(yīng)衰減10倍。經(jīng)由以上需求,本文設(shè)計了由六根兩端具有柔性縮頸的細(xì)桿組成的柔性支撐系統(tǒng)(以下簡稱為六桿支撐系統(tǒng)或六桿),如圖1所示。
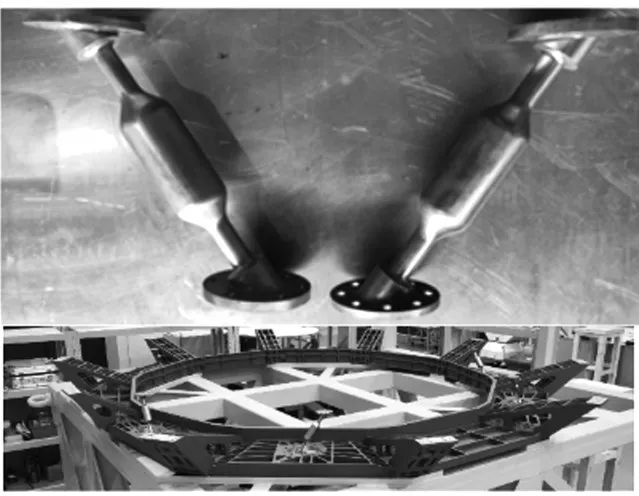
圖1 六桿支撐系統(tǒng)
六桿支撐系統(tǒng)形成準(zhǔn)靜定安裝,每對連桿形成二腳架結(jié)構(gòu),三組二腳架呈120°分布。每根連桿兩端采用圓柱形細(xì)頸形成柔性鉸鏈,起到增大彎曲柔度的作用。六桿系統(tǒng)的作用主要是隔離衛(wèi)星平臺與外層結(jié)構(gòu)由于熱不均勻性等引起的變形干擾,保證光學(xué)系統(tǒng)結(jié)構(gòu)穩(wěn)定性[8]。
2 桿系參數(shù)的確定
六桿系統(tǒng)設(shè)計包括桿系空間布局和連桿柔鉸參數(shù)的確定,根據(jù)連接剛度、連接柔度和柔鉸強(qiáng)度等指標(biāo)進(jìn)行設(shè)計,主要流程如圖2所示。首先通過連接頻率(固有頻率不小于15 Hz)分析得出桿系空間布局,然后利用以地面載荷(1.2 g重力荷載)為輸入的強(qiáng)度分析確定柔鉸直徑,最后進(jìn)行柔度分析(10倍變形衰減)從而確定柔鉸長度。
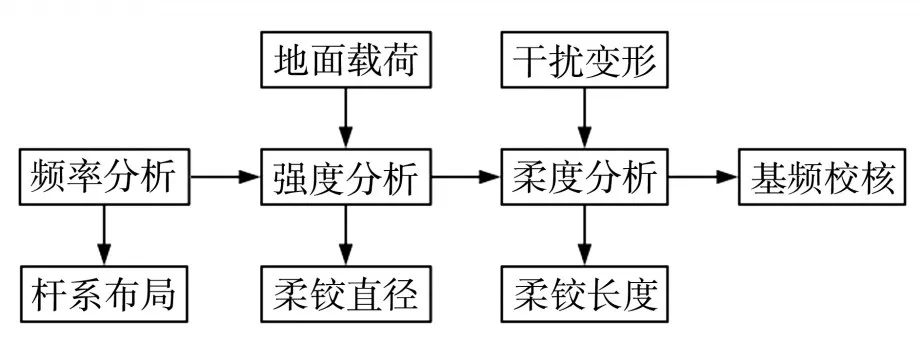
圖2 六桿參數(shù)確定流程
2.1 柔性支撐空間參數(shù)的確定
對于六桿支撐系統(tǒng)的指標(biāo)要求為基頻大于15 Hz且滿足強(qiáng)度需求。六桿組件每兩根連桿形成一個二腳架組,三組二腳架中心對火箭中心呈120°分布,連桿上、下端點分別在公共圓上,其它空間參數(shù)還包括每組二腳架的跨距和連桿的傾角。
桿系空間布局對整體連接剛度影響很大,所以以桿系連接一階固有頻率最大為優(yōu)化目標(biāo),根據(jù)總體要求,連桿下端為固定狀態(tài)。通過前期分析計算,在某一公共圓尺寸下,桿系空間分布包絡(luò)應(yīng)呈上圓小、下圓大的錐臺形狀。
與連桿上端連接的光具座如圖3所示,其可行連接區(qū)域已較為受限,取其公共圓直徑為3.2 m,且二腳架跨距無法相同,取X1為1.1 m、X2為1.6 m。根據(jù)空間限制,取桿系下公共圓直徑3.4 m,對應(yīng)的跨距設(shè)為Y1和Y2,即為優(yōu)化變量。
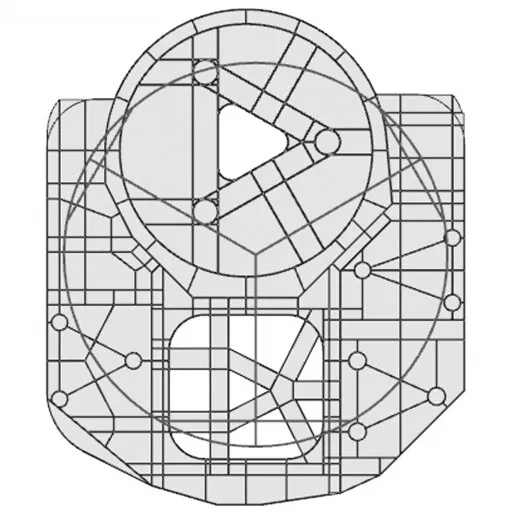
圖3 光具座與六桿連接點分布圖
建立簡化有限元模型,進(jìn)行二優(yōu)化變量的可行空間搜索,得出一階頻率變化特性,如圖4所示。在Y1與Y2的整個可行搜索空間出現(xiàn)兩個獨立的一階頻率最大峰值,其所形成的連桿組系分別呈“A”型和“V”型支撐布局,如圖5所示。進(jìn)一步根據(jù)衛(wèi)星平臺端的空間限制,桿系空間布局最終取為“V”形布局,如圖5(b)所示。
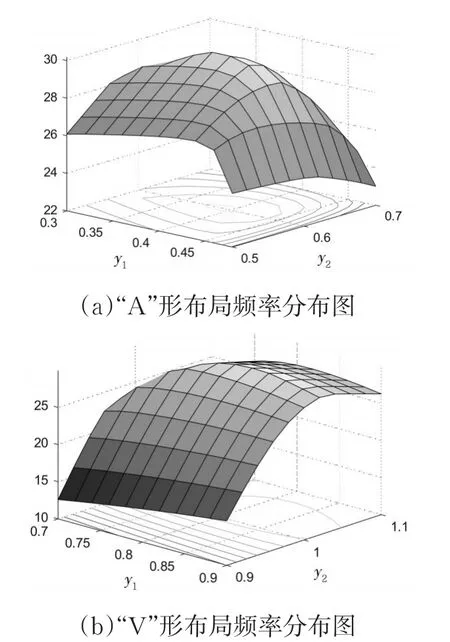
圖4 六桿空間布局與頻率分布圖
表1為兩種構(gòu)型的Y1和Y2最優(yōu)解值,以及一階與二階固有頻率,其振型分別為相互垂直的兩個方向的搖晃,可以看出兩階固有頻率值都非常接近,說明最優(yōu)的桿系分布在各個方向都具有均衡的支撐。

表1 兩種構(gòu)型下的一階與二階頻率
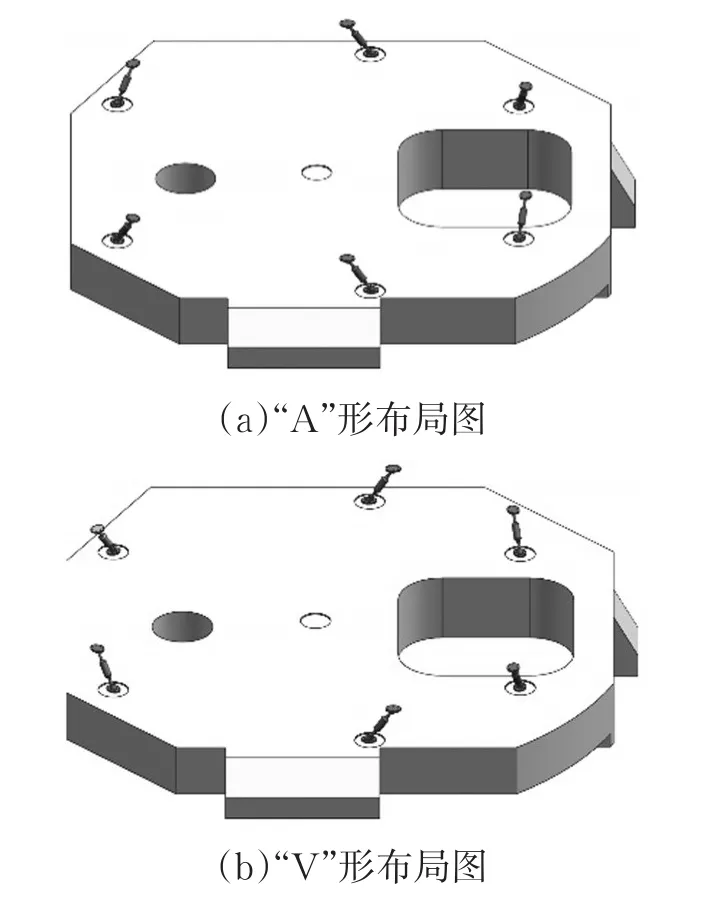
圖5 六桿布局圖
2.2 桿端柔性鉸鏈參數(shù)的確定——直徑
為使連桿近似具有二力桿特性,從而使桿系形成靜定支撐,在連桿兩端設(shè)計有圓柱形細(xì)徑柔性鉸鏈,以增加端部彎曲柔度,代替球鉸配合副。
在桿系空間布局確定的條件下,建立有限元模型。以地面1.2倍重力加速度為質(zhì)量載荷,分別計算桿系支撐側(cè)向懸臂和豎立兩種狀態(tài)下的連桿柔鉸應(yīng)力,結(jié)果如表2和表3所示。對比兩表,可以看出:(1)懸臂狀態(tài)應(yīng)力大于豎立狀態(tài)應(yīng)力;(2)彎應(yīng)力較小,即連桿受力以軸力為主,與二力桿接近;(3)綜合應(yīng)力與柔鉸長度關(guān)系很小。
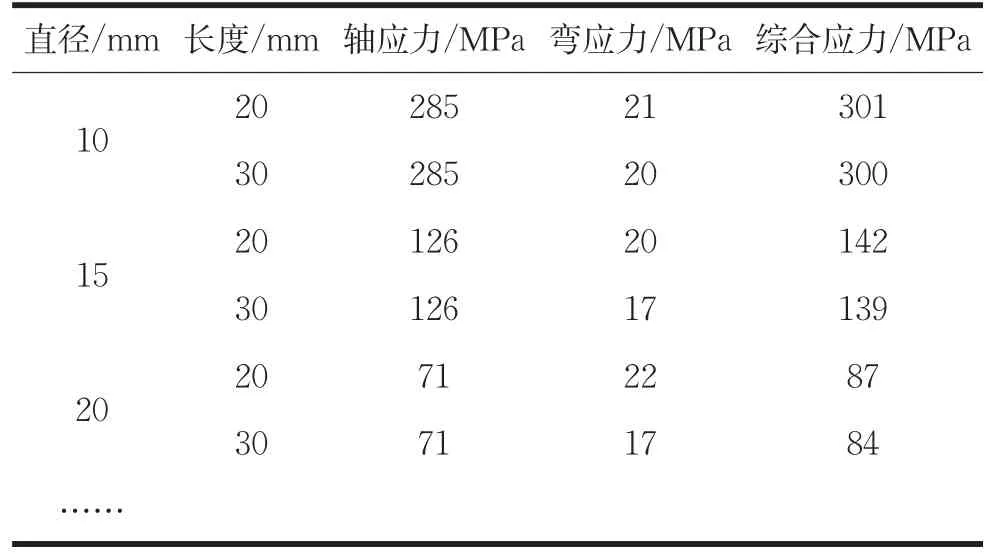
表2 相機(jī)懸臂狀態(tài)柔鉸應(yīng)力
若柔鉸材料取為鈦合金,其屈服強(qiáng)度為800 MPa,安全系數(shù)取為6倍,則使用強(qiáng)度為800 MPa/6,則柔鉸直徑大于15 mm便可滿足強(qiáng)度要求,考慮其它未知因素所需要的強(qiáng)度余量,取為20 mm。
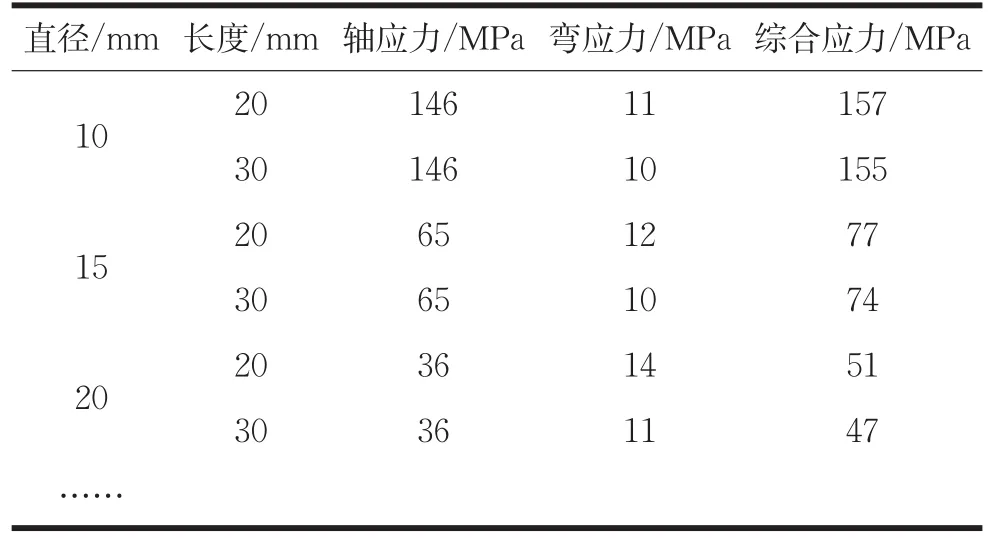
表3 相機(jī)豎立狀態(tài)柔鉸應(yīng)力
2.3 桿端柔性鉸鏈參數(shù)的確定——長度
在六桿系統(tǒng)的隔離作用下,針對熱不均勻性變形的實際情況,將熱變形轉(zhuǎn)換為干擾位移0.1 mm并輸入到六桿下端,此時要求光具座下表面變形小于10 μm。由于此干擾位移是由熱變形所轉(zhuǎn)換,故干擾位移的方向從空間上可分為面外(軸向)及面內(nèi)(周向、徑向)兩種。通過前期模擬,六桿系統(tǒng)對面內(nèi)的干擾位移具有非常優(yōu)異的衰減能力(50倍以上),故本文中僅針對軸向干擾位移進(jìn)行討論。
在柔鉸直徑確定的情形下,其長度越大,則柔度越大。建立有限元模型,變化柔鉸長度,考察在不同干擾位移作用下的光具座變形量。假設(shè)在六桿下端施加三種干擾位移:(1)±0.1 mm的軸向交錯;(2)±0.1 mm的兩點翹邊(1組二腳架);(3)0.1 mm的單點翹邊。長度為40 mm的光具座變形數(shù)據(jù)如表4所示,可見,此長度下的柔性鉸鏈的柔度滿足輸入0.1 mm量級干擾下的隔離要求。表4中同時列出各干擾位移時所產(chǎn)生的柔鉸應(yīng)力(綜合),也滿足強(qiáng)度要求。三種工況下的光具座變形數(shù)據(jù)如圖6所示,可見三種工況下光具座變形均在微米量級,變形量較小。
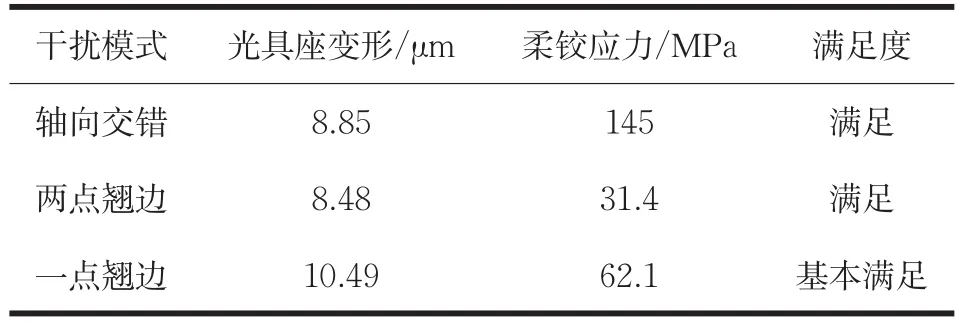
表4 光具座變形和柔鉸應(yīng)力
2.4 固有頻率的校核
根據(jù)以上分析結(jié)果,柔鉸直徑為20 mm,長度為40 mm,同樣建立簡化有限元模型,進(jìn)行模態(tài)分析,一階和二階固有頻率分別為36.21 Hz和36.27 Hz。該頻率是在對光學(xué)系統(tǒng)簡化模型基礎(chǔ)上得出的,其主要彈性環(huán)節(jié)僅為柔性鉸鏈,所以真實結(jié)構(gòu)的固有頻率可能低于該值。
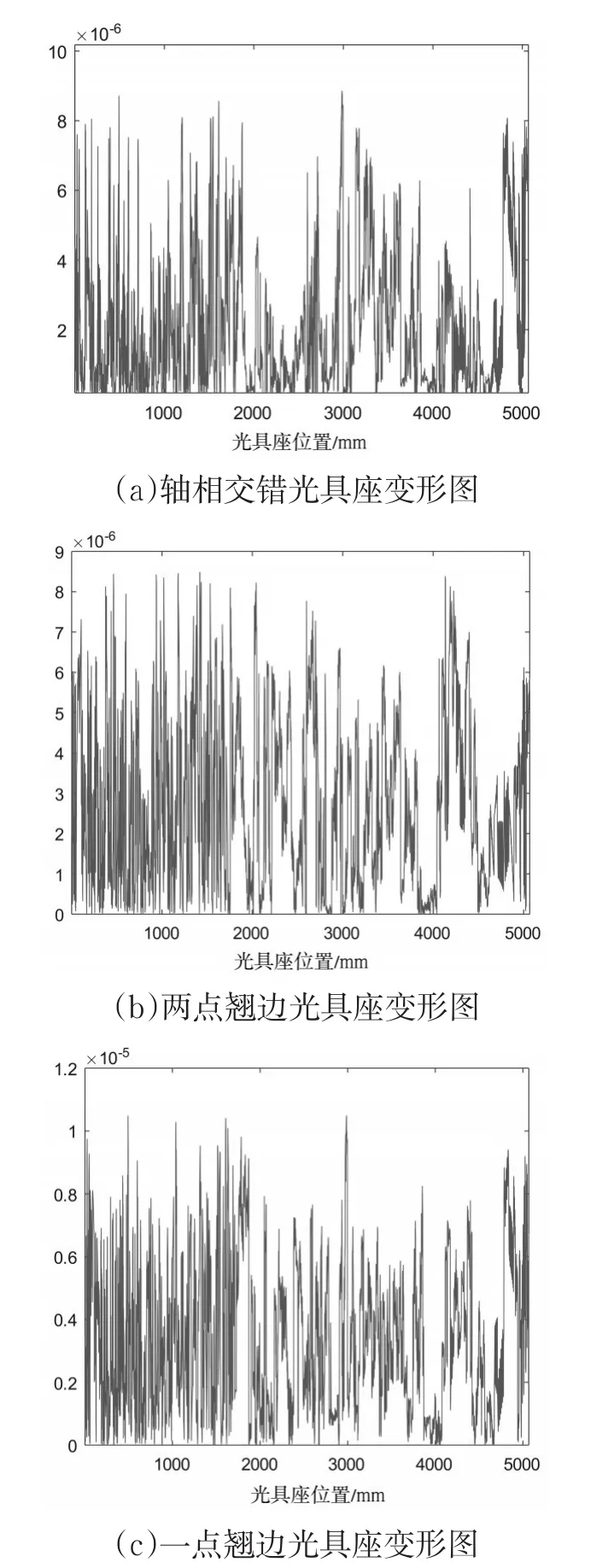
圖6 三種工況下的光具座變形數(shù)據(jù)圖
3 結(jié)論
本文根據(jù)某大型空間相機(jī)的設(shè)計要求,進(jìn)行了光學(xué)系統(tǒng)與衛(wèi)星平臺間支撐結(jié)構(gòu)的設(shè)計。通過基頻的計算,確定了空間參數(shù)布局的最優(yōu)解,并根據(jù)光學(xué)系統(tǒng)的穩(wěn)定性對支撐結(jié)構(gòu)提出了柔性支撐方案。利用地面荷載及變形干擾,對柔性支撐結(jié)構(gòu)的桿系參數(shù)進(jìn)行了確定。最后,進(jìn)行了強(qiáng)度校核。通過合理的空間布局及桿系參數(shù)的確定,該柔性支撐結(jié)構(gòu)滿足了基頻15 Hz,10倍變形衰減的力學(xué)性能要求且強(qiáng)度上預(yù)留了6倍以上的安全裕度,說明支撐系統(tǒng)能夠滿足空間應(yīng)用要求。本文設(shè)計的六桿系統(tǒng)由于實際使用時光具座的連接點選擇范圍較為受限,故在本文中未涉及六桿系統(tǒng)光具座端的空間參數(shù)設(shè)計,但在前期分析中可以看出六桿光具座端的空間參數(shù)對六桿系統(tǒng)的使用效果也具有較大影響,設(shè)計時也應(yīng)予以關(guān)注。本文的設(shè)計內(nèi)容可為同類大型空間相機(jī)的設(shè)計提供一定的參考和借鑒。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36