基于能量收集的海洋浮標無線傳感節點設計
2019-11-16 12:26:24胡凱陳志棟
物聯網技術 2019年10期
胡凱 陳志棟
摘 要:對于海洋信息的監測大多通過海面上漂浮的浮標完成,而電池是海洋無線浮標傳感節點的主要供電來源,但是傳統電池仍具有一些無法改變的缺點, 如供能壽命有限、需要定期更換等。振動能是環境中廣泛存在的一種能量形式,特別是在海洋浮標上。收集環境中的振動能并向電池充電可大幅度延長電池使用壽命,使得海洋浮標信息傳感節點得以更長時間地工作,大幅度增加節點使用壽命,降低電池更換成本。經實驗測試可知,振動能量的收集功率為0.61 mW,測試中無線傳感節點的靜態電流為34 μA,工作電流為27.2 mA,平均功耗為0.99 mW,通過能量收集,電池的使用時間提升了1.6倍。
關鍵詞:能量收集;電池;振動能;無線傳感;海洋浮標;產能
中圖分類號:TP212文獻標識碼:A文章編號:2095-1302(2019)10-00-03
0 引 言
對海洋信息進行實時檢測,不僅可以預防海洋的環境污染、預測天氣,對水產養殖也具有極其重要的作用。我國每年需要消耗大量的水產養殖品,其中一半來自于近海的水產養殖,實時監測海水變化,可有效預防事故發生,優化并提高產能[1]。目前,對于海洋信息的監測大多通過海面上的浮標完成,而電池是海洋無線浮標傳感節點[2-3]的主要供電來源。但是傳統電池仍具有一些無法改變的缺點,如供能壽命有限、需要定期更換等,而且我國海岸線較長,需要監控的無線節點數以千萬計,如果一一定時去更換電池,需要浪費較多的人力與物力,得不償失。
因此,為了使電池能夠更長久地工作,人們致力于低功耗技術的研發,以大大降低芯片工作的功耗。但是單獨的低功耗技術還遠遠不夠,本文收集海洋浮標的振動能量并向電池充電,以此大幅度延長電池使用壽命,使得海洋信息傳感節點得以更長時間的工作,不僅可以節省大量電池成本,更節省了更換電池產生的人力成本。
1 系統整體設計
本文系統主要包括兩部分。
(1)工作在海洋浮標上的無線傳感節點能夠實時采集海水溫度等信息,并且能夠進行無線數據的收發。為了降低功耗,無線傳感節點處于間歇式工作狀態。
(2)海面上的浮標一直處于振動狀態,能夠收集浮標的振動能量并向電池充電,以此大幅度延長電池使用壽命。能量收集包括懸梁臂及無源能量收集電路兩部分。
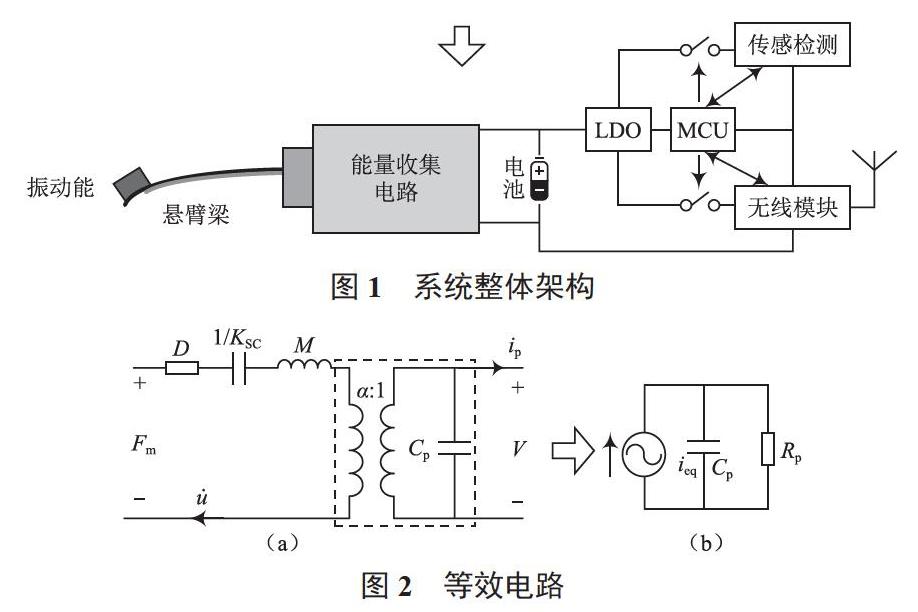
系統整體架構如圖1所示。
2 能量收集
2.1 能量收集裝置
振動是環境中廣泛存在的一種能量形式,如大自然中水和空氣的流動、工業機器運作時的振動等。本文采用壓電式振動能量俘獲裝置,利用壓電材料的正壓電效應將環境中的振動能轉換為電能[4-5]。
壓電元件的等效電路可用一個機械彈簧系統耦合到電域表示。等效電路如圖2所示,Fm表示外界受到的力激勵,M表示模態質量,D表示阻尼系數,KSC表示整體等效剛度,α表示壓電電壓系數,Cp表示壓電受夾電容。當激發正弦振動時,壓電元件可建模成由一個正弦電流源ieq、電容CP和電阻Rp組成的電路[6-7]。
2.2 能量收集電路
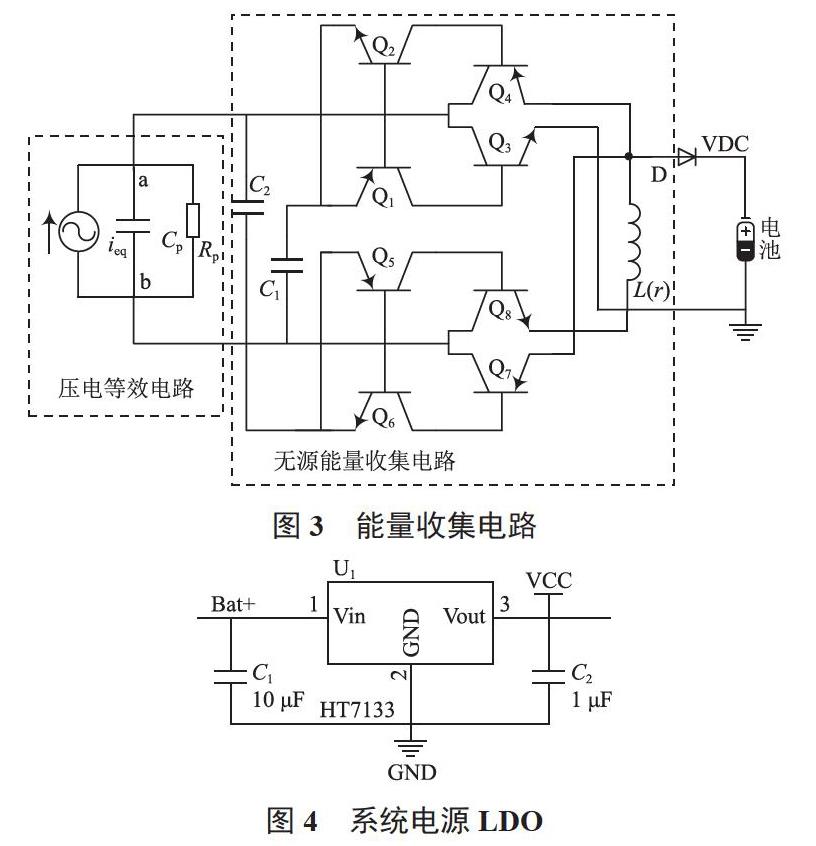
本文提出一種無源的能量收集電路。如圖3所示,當壓電片開始振動時,Cp兩端電壓開始升高,當壓電片運動到最大位移時,電壓達到最大值VMax,然后壓電片向反方向運動,電壓慢慢下降,當達到VMax-2VBE時,開關導通,電容Cp與電感L組成LC振蕩回路,Cp上的電荷向電感轉移,當經過1/4振蕩周期后,電感向電池充電。
3 無線傳感節點
3.1 系統電源LDO
一般鋰電池的電壓為3.7 V,而系統電壓為3.3 V,因此需要一個3.3 V LDO作為電源模塊。本文采用HT7133作為穩壓器,輸出電壓為3.3 V,最大輸出電流為30 mA,靜態電流為2.5 μA。系統電源LDO如圖4所示。
3.2 微處理器(MCU)設計
主機處理器選用Microchip公司的PIC16LF1825芯片。Microchip公司的單片機具有功耗低、抗干擾能力強、內部資源豐富、種類齊全等特點,其電路原理如圖5所示。MCU的RA1,RA2,RC0,RC1用來控制CC1101無線發射芯片發射數據,RX,TX,Data用來讀取傳感器信息,RC2引腳用來控制P1開關,控制傳感器及無線發射模塊是否通電。為了降低功耗,在大多數情況下,傳感器及無線發射模塊均不上電。
3.3 無線收發模塊設計
本文采用CC1101無線收發模塊進行數據的收發。CC1101是一款高性能極低功耗的RF應用通信芯片,通過配置,可工作在315 MHz,433 MHz,868 MHz和915 MHz工作頻段上。
CC1101中有SI,SO,SCLK和CSn四個控制引腳,可通過這些引腳和GDO2對CC1101進行配置。SI,SO,SCLK是同步串行SPI通信接口,CSn 是芯片的選擇引腳,當CSn為低電平0時,單片機可通過SPI與CC1101通信。SO和SI用于傳輸數據,SO為輸出數據,SI為輸入數據,SCLK為SPI接口的同步時鐘;若CC1101接收到數據,則GDO2電平就會發生跳變,此時可通過單片機檢測判定是否有數據到來。CC1101原理如圖6所示。
3.4 濁度傳感器模塊
本文采用濁度傳感器模塊TSW-20M,如圖7所示。濁度傳感器可直接與單片機經串口通信,但耗電較大,約為11 mA,因此只能將開關P1處于間斷式工作狀態,以降低功耗。
3.5 水溫傳感器模塊
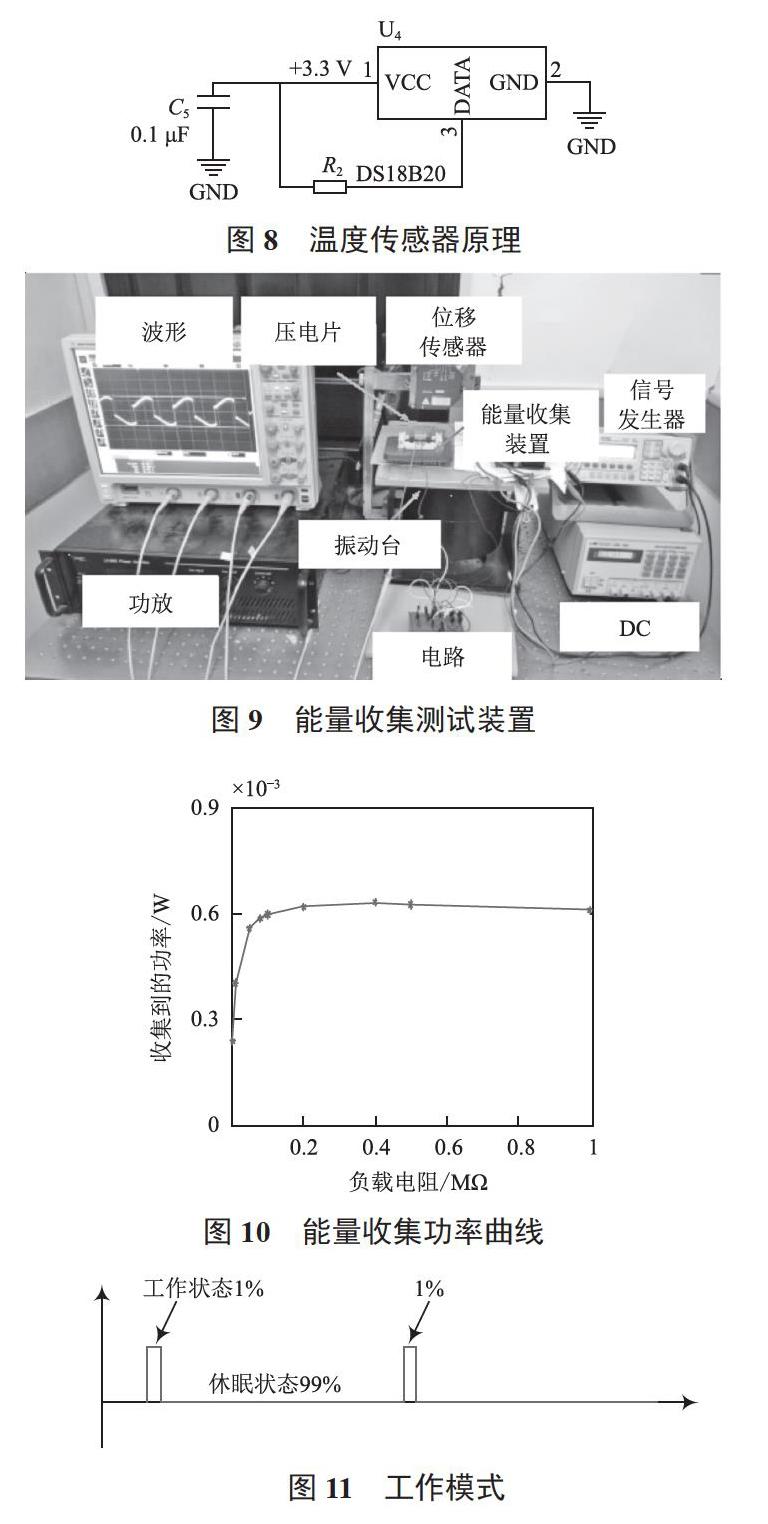
本文選用數字化溫度傳感器DS18B20,采用熱導性高的密封膠灌封,使其可在水下工作。溫度測量范圍為-55~125 ℃,精度為0.5 ℃,完全滿足要求。耗電約為1 mA,故將開關P1處于間斷式工作狀態,以降低功耗。溫度傳感器原理如圖8所示。
4 實驗測試
基于能量收集的海洋浮標傳感節點的測試主要分為兩部分:
(1)能量收集功率測試,模擬海洋浮標振動環境,測試其收集功率;
(2)系統消耗功率測試,并比較電池使用壽命提升比。
能量收集功率測試裝置如圖9所示,利用功放驅動振動臺進行振動,以此模擬海洋浮標的振動。能量收集裝置隨著振動臺、帶著壓電片一起振動。所需壓電片振動時會產生電量,利用電路收集。測量負載端收集到的能量,可得到如圖10所示的收集功率曲線。由圖10可知,能量收集功率與負載有關,在負載較小時,收集功率較低,當負載大于0.5 MΩ時,能量收集功率趨于平穩,最大可達0.61 mW。
系統采用間斷式工作模式,傳感器及無線收發模塊大多處于關閉狀態,以此降低功耗。工作模式如圖11所示。
工作狀態下,單片機、傳感器及無線模塊都處于工作狀態,實測單片機電流為1.2 mA,濁度傳感器電流為12.5 mA,溫度傳感器電流為1.5 mA,無線發射模塊電流為12 mA,總電流為27.2 mA。
休眠狀態下,傳感器及無線模塊都處于斷電狀態,單片機處于RC低頻模式,功耗為34 μA。
全周期為100 s,其中工作狀態為1 s,休眠狀態為99 s,因此系統的平均電流約為0.3 mA,平均功耗為0.99 mW。
若有能量收集,則平均功耗為0.99 mW-0.61 mW=0.38 mW,1 000 mA·h電池使用時間為1 010 h。若無能量收集,平均功耗為0.99 mW,1 000 mA·h電池使用時間為2 631 h。因此,通過能量收集,電池的使用時間延長了1.6倍。
5 結 語
本文通過收集環境中的振動能,并向電池充電,以此大幅度延長電池使用壽命,使得海洋浮標信息傳感節點得以更長時間地工作,降低電池更換成本。經實驗測試可知,通過能量收集,電池的使用時間提升了1.6倍。
參 考 文 獻
[1]曾容,許艷,楊翼.海洋環境監測數據統計研究[J].海洋開發與管理,2017,34(4):32-37.
[2]張明陽,沈明玉.基于 WSN 的數據融合在水質監測中的研究[J].計算機工程與應用,2014,50(23):234-238.
[3]余艷偉,徐鵬飛.近距離無線通信技術研究[J].河南機電專科學校學報,2012,20(3):18-20.
[4]屈鳳霞,夏銀水,施閣,等.自供電的同步電荷提取電路的優化設計[J].傳感技術學報,2016,29(3): 349-355.
[5]陳紹煒,王子,魏剛.基于壓電能量收集技術的無線傳感器節點設計[J].計算機測量,2014,22(3):952-955.
[6]劉成龍,孟愛華,陳文藝,等.振動能量收集技術的研究現狀與發展趨勢[J].裝備制造技術,2013(12):43-47.
[7]劉創,王珺,吳涵.無線可充電傳感器網絡的移動充電問題研究[J].計算機技術與發展,2016,26(3):162-167.
[8]代萬寶,張傳杰,喻言.應用于海洋平臺振動檢測的無線傳感器系統技術研究[J].物聯網技術,2013,3(1):25-29.
[9]周金金.海洋浮標圖像采集系統的電子穩像技術研究[D].北京:中國礦業大學,2015.
[10]毛垚飛,朱克強,夏峰,等.海洋浮標發電裝置優先工況選擇的動力學分析[J].中國航海,2017,40(3):54-57.
