基于光柵傳感器的空間靶標定位技術(shù)研究
2019-11-15 09:33:03馬游春馬子光蘇慶慶張麗梅
中國測試 2019年6期
馬游春 馬子光 蘇慶慶 張麗梅
摘要:由于太空環(huán)境的特殊性,空間靶標定位相對復雜,給武器的精度評估測試增加困難。針對現(xiàn)有定位技術(shù)在精度和使用壽命等方面都存在不足的問題,提出一種基于光柵傳感陣列的空間靶標精確定位的方法。模擬靶標受子彈沖擊的全過程,并通過力學仿真分析該過程中靶標應(yīng)力應(yīng)變的分布情況。搭建數(shù)據(jù)采集系統(tǒng),由光柵傳感陣列測得靶標各個位置的應(yīng)變值,通過質(zhì)心算法進行解算,最終確定射擊中心點的位置。經(jīng)過測試分析,該方法的定位誤差在0.5%以內(nèi),可實現(xiàn)空間靶標的精確定位。
關(guān)鍵詞:光柵傳感;靶標定位;應(yīng)力應(yīng)變;質(zhì)心算法
中圖分類號:TH741 文獻標志碼:A 文章編號:1674-5124(2019)06-0109-05
0 引言
隨著軍事科技的進步,未來戰(zhàn)爭已經(jīng)開始向太空擴展,各類天基武器應(yīng)運而生,太空狙擊槍就是其中之一。在太空狙擊槍的研發(fā)階段,通常需要進行多次測試試驗,而靶標的精確定位是提高精度指標的關(guān)鍵。在太空環(huán)境中,沒有像陸地上那樣便捷的靶場測試環(huán)境,也無法將陸地環(huán)境下標定靶標的一系列設(shè)備都安裝于太空中,因此其環(huán)境的特殊性決定了靶標定位的復雜性,這大大增加了太空狙擊槍精度測試的難度[1-2]。
目前,國內(nèi)外關(guān)于太空環(huán)境中靶標定位的研究多為相機圖像標定法[3]。美國在靶標識別定位時采用的是由美國國家航空航天局研發(fā)的高級視覺制導傳感器(AVGS),該系統(tǒng)使用激光和圖像識別技術(shù)識別靶標,此種靶標的實現(xiàn)需要采用兩種不同波長的激光對其進行照射,同時,靶標制作較為復雜,且在使用時需要一定外界條件的輔助,有一定的局限性。我國的空間靶標定位一般采用張友正攝像機標定法,即對攝像機回傳的圖像進行算法處理,最終得到中心坐標。此類方法受設(shè)備像素限制,無法做到高精度定位,且同樣受外界環(huán)境條件的限制。
針對現(xiàn)有技術(shù)的穩(wěn)定性不強、定位精度不高等局限性,本文提出了一種基于光柵傳感器陣列的空間靶標的質(zhì)心算法定位技術(shù)。光纖光柵具有抗干擾性強、體積小、耐腐蝕等突出優(yōu)點,不受太空中惡劣環(huán)境條件的影響,且光柵對外界物理環(huán)境極其敏感,所以可滿足高精度定位的要求。該方法是將光柵傳感器陣列安裝在空間靶標的背部,利用傳感器陣列測得靶標的應(yīng)變分布情況,進而通過質(zhì)心算法,準確得到靶標中心點。
1 光柵傳感器的應(yīng)變特性
根據(jù)光纖布拉格光柵本身的特性,其中心波長λB的公式為
λB=2neff∧(1)式中:∧——光柵的柵格周期;
neff——光纖纖芯的有效折射率。
由式(1)可知,λB與neff和∧呈正比[4]。當外界環(huán)境因素(如溫度、應(yīng)力)改變時,A和neff會發(fā)生變化,從而導致λB改變,如下式所示:式中:△λB——λB的偏移量,nm;
△neff——neff的改變量;
△∧——∧的變化量。
由式(2)可知,通過測量偏移量ˇλB,即可達到對外界溫度、應(yīng)變等物理量的間接測量。
當對光纖光柵施加應(yīng)力作用時,其中心波長的變化量可通過下式描述:式中:△L——光柵的軸向變化量;
△α——纖芯直徑的變化量;
——彈光效創(chuàng)起的光纖折射率變化;——波導效應(yīng)引起的光纖折射率變化。
neff也可用光纖的彈光系數(shù)p1j(j=1,2)表示:其中,ν為泊松比。
聯(lián)立式(4)和式(3)可得:
引入系數(shù)Kε,令
因此:
對于某一種光纖介質(zhì),其Kε通常為固定值。由式(7)不難看出,光柵反射譜中心波長和光柵的軸向應(yīng)變呈線性關(guān)系,因此可以通過測量波長的變化量得出外界物理量所引起的光柵應(yīng)變[5-6]。
2 靶標應(yīng)力應(yīng)變仿真分析
利用ANSYS軟件進行子彈射擊靶標的力學仿真分析。仿真系統(tǒng)中靶標材料選擇特種鋼材603鋼,靶標大小200mm×200mm,厚度為15mm;設(shè)置靶標的屈服強度為2500MPa,彈性模量為105GPa。考慮到高速撞擊過程中靶標有可能被子彈擊穿從而導致其背部安裝的光柵傳感器受損,因此子彈選用陶瓷材料[7],直徑8mm,長度15mm,設(shè)置其初速度1500m/s。建模完成后,模擬子彈對靶標中心的撞擊試驗,并得到靶標的應(yīng)力及總位移的仿真云圖和曲線擬合圖分別如圖1和圖2所示。
從圖2中可以看出,在靶標的中心位置,其應(yīng)力和總位移都達到最大值,并且向四周逐漸減小,該變化趨勢與圖1的仿真云圖相對應(yīng)。
3 光柵應(yīng)變的質(zhì)心法定位
根據(jù)模擬仿真試驗得出的靶標應(yīng)力應(yīng)變分布情況,由光柵傳感陣列測得靶標的應(yīng)變分布,再經(jīng)算法解算,就能得到子彈射擊中心點的位置ls]。本文采用了5×5的光柵傳感器陣列均勻分布于靶標背部,其分布示意圖如圖3所示。
本文提出質(zhì)心法解算光柵傳感陣列測得的應(yīng)變值,從而得到最大應(yīng)變值所在位置,即為射擊中心點。根據(jù)質(zhì)心原理[9],本文假設(shè)靶標在受到子彈撞擊時,其表面的應(yīng)變分布系統(tǒng)是一個有質(zhì)量的系統(tǒng),并由質(zhì)心計算公式算出的應(yīng)變質(zhì)心,即為子彈撞擊靶標的位置。在圖3中,B1陣列中A1B1處的傳感器測得的應(yīng)變值相比于其他4個點的應(yīng)變值越大,則撞擊的位置越靠近A1B1點。因此在B1陣列中,將這5個點的應(yīng)變值與X軸的坐標值求卷積和,再與這5個位置的應(yīng)變和相除,相當于將這5個點的應(yīng)變集中作用于某一點上,該點即為B1陣列中應(yīng)變質(zhì)心的位置,其計算公式如式(8)所示,同理可求得B2、B3、B4和B5各陣列的應(yīng)變質(zhì)心位置,并將其求平均值,可得到更加精確的靶標應(yīng)變質(zhì)心坐標。
4 光柵解調(diào)系統(tǒng)設(shè)計
對光柵信號波長進行編碼檢測,將光信號轉(zhuǎn)變?yōu)殡娦盘柌⑦M行數(shù)據(jù)處理顯示是光柵信號解調(diào)的關(guān)鍵所在。經(jīng)與其他方法綜合比較,該解調(diào)系統(tǒng)選擇的是基于波長編碼解調(diào)的可調(diào)諧F-P濾波解調(diào)法[10]。可調(diào)諧F-P腔的結(jié)構(gòu)如圖4所示。F-P腔中有兩個高反射透鏡L1和L2,前者的背面貼有PZT壓電陶瓷,能夠在固定的范圍內(nèi)移動,其作用是微調(diào)腔長;后者不能移動,固定在濾波器上。高透鏡L1把人射光轉(zhuǎn)換為平行光傳遞到F-P腔體中,當給F-P濾波器加載驅(qū)動電壓時,腔長會因PZT產(chǎn)生伸縮而發(fā)生變化,進而導致F-P腔的透射波長也相應(yīng)改變。
4.1 解調(diào)系統(tǒng)硬件設(shè)計
該光柵解調(diào)系統(tǒng)的組成主要包括光路、電路兩大部分,光路部分由ASE光源、光耦合器、F-P濾波器、光柵陣列、梳狀標準具、光電轉(zhuǎn)換器PD組成;電路部分主要由信號調(diào)理、A/D采集、D/A三角波輸出模塊、質(zhì)心法尋峰模塊、數(shù)據(jù)傳輸模塊組成。解調(diào)系統(tǒng)的總體框圖如圖5所示。
解調(diào)系統(tǒng)的工作過程為:ASE光源發(fā)出的光信號輸入F-P濾波器中,濾波器根據(jù)加載于其兩端的掃描電壓值,會選擇性輸出固定電壓范圍內(nèi)的光信號,該信號再進入FBG光柵,只有與光柵的反射中心波長相匹配的光信號被反射出來,經(jīng)過光耦合器后分成兩路相等光強的信號:第一路信號直接由光電探測器轉(zhuǎn)為電信號;第二路經(jīng)過隔離后進入梳狀標準具,實現(xiàn)波長的動態(tài)校準,確保測量精度。這兩路光信號經(jīng)光電轉(zhuǎn)換和調(diào)理之后由A/D模塊進行數(shù)據(jù)采集,并由FPGA主控模塊對A/D轉(zhuǎn)換后的中心波長信號進行數(shù)字濾波和質(zhì)心算法數(shù)據(jù)處理,從而得光柵反射譜中心波長的變化,再由光纖光柵的應(yīng)變特性,進而解調(diào)出外界應(yīng)力、溫度的變化。
4.2 質(zhì)心尋峰算法的邏輯設(shè)計
在光柵解調(diào)系統(tǒng)中,一般運用質(zhì)心尋峰算法、多項式擬合算法和高斯擬合算法等算法來提取光柵反射譜中心波長的峰值位置。經(jīng)過試驗比較,本文最終選擇了質(zhì)心算法作為光柵尋峰的方法[11],其質(zhì)心解算原理如圖6所示。
該質(zhì)心尋峰算法的目的是確定光柵反射譜中心波長的峰值位置,其原理與本文之前用到的應(yīng)變質(zhì)心定位方法的原理基本相同。將光柵反射譜的波形包圍區(qū)域的光強看作是這一個區(qū)域的質(zhì)量總和。圖中橫坐標為三角波掃描電壓對應(yīng)的波長λi,縱坐標為A/D模塊的采樣值Pi[11]。
光柵反射譜質(zhì)心法尋峰的計算公式如下式所示:式中:Pth——系統(tǒng)設(shè)定的閾值,V;
λ0——與閾值相對應(yīng)的波長值,nm。
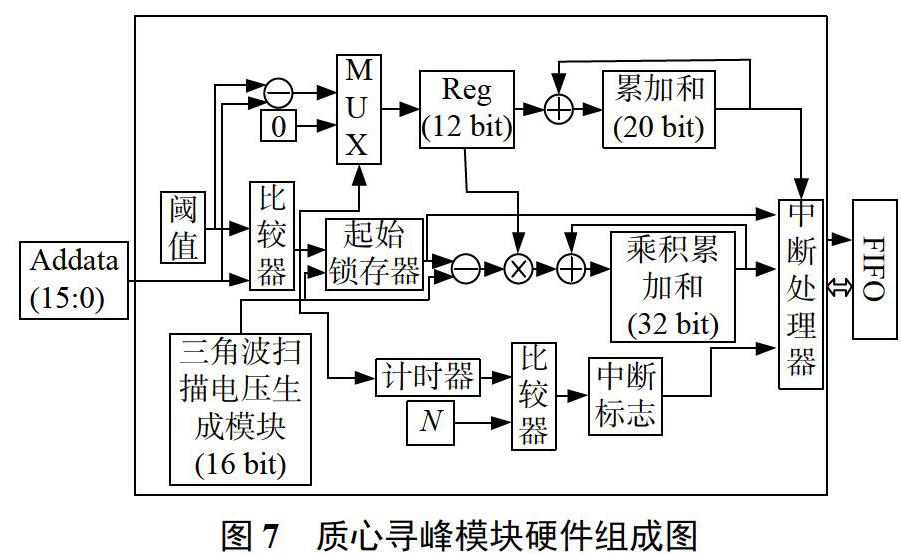
光柵解調(diào)系統(tǒng)中,質(zhì)心算法尋峰模塊的邏輯組成如圖7所示,該模塊旨在完成對信號的閾值判斷和數(shù)學解算。當該模塊內(nèi)部檢測到有A/D采集模塊傳來的數(shù)據(jù)時,該數(shù)據(jù)先被送入比較器與設(shè)定好的閾值進行實時比較。當傳感信號大于閾值時,質(zhì)心尋峰模塊開始工作,信號在內(nèi)部需要完成累加和、乘積累加和等運算;當信號小于閾值時運算停止,運算結(jié)果被輸入FIFO中進行緩存。
質(zhì)心解算模塊程序代碼的時序仿真波形如圖8所示。可以看出,質(zhì)心解算模塊滿足設(shè)計要求。
5 系統(tǒng)測試結(jié)果分析
在上位機軟件中對質(zhì)心算法模塊輸出的解調(diào)結(jié)果進行數(shù)據(jù)處理,由光纖光柵的應(yīng)變特性,即可將波長變化轉(zhuǎn)換為應(yīng)變的變化。
為準確表示射擊中心點位置,選擇以靶標的某一角作為坐標原點并建立坐標系,靶標上任意一點都可通過坐標精確表示。測試系統(tǒng)所用的靶標為1000mm×1000mm的鋼靶,因此,圖3中光柵陣列的X、Y軸坐標分別為50,275,500,725,950mm。
在進行系統(tǒng)測試時,選擇對靶標中心點(500mm,500mm)進行準確射擊,數(shù)據(jù)采集系統(tǒng)對光柵陣列中各光柵傳感器受應(yīng)變后的光柵反射譜的中心波長進行采集,在上位機軟件中對采集的各路光柵中心波長進行數(shù)據(jù)處理,將中心波長的變化量換算成相對應(yīng)的應(yīng)變。因此,各光柵傳感器所在位置的應(yīng)變值如表1所示。
在表1中,分別將每一行的應(yīng)變值帶入式(8)中進行計算,并對計算得到的5個質(zhì)心值求平均數(shù),可最終求得射擊中心點的X=498.45mm。同理可求得射擊中心點Y=501.35mm,即中心點坐標為(498.45mm,501.35mm),與實際坐標(500mm,500mm)相比,誤差在±0.5%以內(nèi)。
6 結(jié)束語
光纖光柵具有諸多優(yōu)勢,特別是遠距離傳輸,且能在高溫、高壓、高腐蝕性等惡劣環(huán)境下正常工作,因此有著廣泛的應(yīng)用。本文根據(jù)傳感光柵的應(yīng)變特性,提出了一種采用光柵傳感陣列來測量空間靶標各位置應(yīng)變分布情況,然后運用質(zhì)心算法對射擊中心點進行準確定位的方法,并在陸地環(huán)境試驗中證明了該方法切實可行。
空間靶標定位技術(shù)是天基武器測試試驗的關(guān)鍵,對我軍武器裝備的發(fā)展具有重要價值。未來如何將靶標放置于太空中,并保證測試系統(tǒng)的高可靠性,將是空間靶標精確定位技術(shù)的關(guān)鍵。
參考文獻
[1]溫卓漫.復雜場景下合作靶標的準確快速識別與定位[D].長春:中國科學院長春光學精密機械與物理研究所,2017.
[2]張李俊,黃學祥,馮渭春,等.基于運動路徑靶標的空間機器人視覺標定方法[J].機器人,2016,38(2):193-199.
[3]魏振忠,孫文,張廣軍,等.激光跟蹤視覺導引測量中靶標球球心定位方法[J].紅外與激光工程,2012,41(4):929-935.
[4]王軍輝.基于F-P濾波器的光柵解調(diào)系統(tǒng)研究及實現(xiàn)[D].太原:中北大學,2013.
[5]馬游春.多光柵采樣傳感技術(shù)研究[D].北京:北京航空航天大學,2012.
[6]姜德.基于FPGA的EFPI傳感器解調(diào)系統(tǒng)研究[D].太原:中北大學,2017.
[7]LIU T G,WANG S,JIANG J F,et al.Research progress ofoptical fiber sensing technology in aerospace[J].Journal of Instruments,2017,35(8):1682-1692.
[8]章武媚.高應(yīng)力條件下T/P91鋼蠕變行為仿真分析[J].鑄造技術(shù),2014,35(5):884-886.
[9]鞏憲鋒,李忠富,王長松,等.質(zhì)心原理在光柵傳感波長解調(diào)中的應(yīng)用[J].北京科技大學學報,2014,26(4):429-432.
[10]朱浩瀚,秦海昆,張敏,等.光纖布拉格光柵傳感解調(diào)中的尋峰算法[J].中國激光,2008,35(6):893-897.
[11]LI P,GAO L M,WU Y M,et al.Research on sub pixelpositioning error of weighted centroid method[J].electronicmeasurement technology,2011,45(2):266-279.
(編輯:商丹丹)
