
Duffing混沌的軌跡跟蹤控制仿真實(shí)驗(yàn)
2019-11-13 08:40:13顏世玉于清文趙海濱
科技創(chuàng)新導(dǎo)報(bào) 2019年17期
顏世玉 于清文 趙海濱

摘 ? 要:根據(jù)Duffing混沌系統(tǒng)和期望軌跡建立軌跡誤差系統(tǒng),采用線性滑模面和雙冪次趨近律設(shè)計(jì)滑模控制器,并采用滑模控制器進(jìn)行軌跡跟蹤控制。采用Simulink軟件建立仿真實(shí)驗(yàn)系統(tǒng)。仿真結(jié)果表明,滑模控制器能夠進(jìn)行Duffing混沌的軌跡跟蹤控制,軌跡跟蹤誤差漸進(jìn)收斂到零。
關(guān)鍵詞:滑模控制器 ?Duffing混沌 ?軌跡跟蹤 ?仿真實(shí)驗(yàn)
中圖分類號(hào):TP273 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A ? ? ? ? ? ? ? ? ? ? ? ?文章編號(hào):1674-098X(2019)06(b)-0009-03
Abstract:According to the Duffing chaos and the desired trajectory, trajectory tracking error system is established. The sliding mode controller is designed by linear sliding mode surface and double power reaching law. The sliding mode controller is used for trajectory tracking control. The simulation experiment system was built by Simulink software. The results show that the sliding mode controller can perform trajectory tracking control of Duffing chaos, and the trajectory tracking error converges to zero gradually.
Key Words:Sliding mode controller; Duffing chaos; Trajectory tracking; Simulation experiment
混沌是非線性系統(tǒng)普遍存在的現(xiàn)象,廣泛存在于自然界和人類社會(huì)中。Duffing混沌是典型的二階嚴(yán)反饋系統(tǒng)[1-2],只采用單一的控制輸入就能實(shí)現(xiàn)軌跡跟蹤控制。滑模控制對(duì)模型誤差和外部干擾信號(hào)具有很強(qiáng)的魯棒性,并具有響應(yīng)速度快和容易實(shí)現(xiàn)等優(yōu)點(diǎn)[3]。滑模控制器的設(shè)計(jì)中常用的趨近律有指數(shù)趨近律、冪次趨近律和雙冪次趨近律等[4-5]。
本文根據(jù)Duffing混沌系統(tǒng)的狀態(tài)方程和期望軌跡建立軌跡跟蹤誤差系統(tǒng),采用線性滑模面和雙冪次趨近律設(shè)計(jì)滑模控制器,最后采用滑模控制器進(jìn)行Duffing混沌的軌跡跟蹤控制。采用Simulink軟件建立仿真實(shí)驗(yàn)系統(tǒng),仿真結(jié)果表明,滑模控制器能夠進(jìn)行Duffing混沌的軌跡跟蹤控制,軌跡跟蹤誤差漸進(jìn)收斂到零,軌跡跟蹤的速度比較快。
1 ?Duffing混沌的軌跡跟蹤誤差系統(tǒng)
Duffing混沌為二階非線性系統(tǒng),狀態(tài)方程為
(1)
其中,x1和x2為系統(tǒng)的狀態(tài)變量,p1,p2,p3和ω為常數(shù)。當(dāng)參數(shù)選擇為p1=-1,p2=0.25,p3=0.3,ω=1時(shí),Duffing系統(tǒng)會(huì)出現(xiàn)混沌現(xiàn)象。
對(duì)于Duffing混沌系統(tǒng),狀態(tài)變量x1的期望軌跡為xd,狀態(tài)變量x2的期望軌跡為。xd為連續(xù)函數(shù),具有二階導(dǎo)數(shù)。Duffing混沌系統(tǒng)的軌跡跟蹤誤差定義為
(2)
對(duì)軌跡跟蹤誤差進(jìn)行求導(dǎo),可以得到軌跡跟蹤誤差系統(tǒng)為
(3)
其中,。
期望軌跡設(shè)定為
(4)
帶有控制輸入的軌跡跟蹤誤差系統(tǒng)為
(5)
其中,u為控制輸入。通過控制輸入u對(duì)軌跡跟蹤誤差系統(tǒng)進(jìn)行平衡控制,軌跡跟蹤誤差漸進(jìn)收斂到零,實(shí)現(xiàn)Duffing混沌系統(tǒng)的軌跡跟蹤控制。
2 ?滑模控制器
對(duì)于Duffing混沌軌跡跟蹤誤差系統(tǒng),采用線性滑模面和雙冪次趨近律設(shè)計(jì)滑模控制器,并采用滑模控制器進(jìn)行Duffing混沌系統(tǒng)的軌跡跟蹤控制。
在滑模控制器的設(shè)計(jì)中,采用的線性滑模面為
(6)
其中,k1為常數(shù),且k1>0。
在滑模控制器設(shè)計(jì)中,雙冪次趨近律表為
(7)
其中,,,,。
采用線性滑模面和雙冪次趨近律設(shè)計(jì)的滑模控制器為
(8)
3 ?仿真實(shí)驗(yàn)
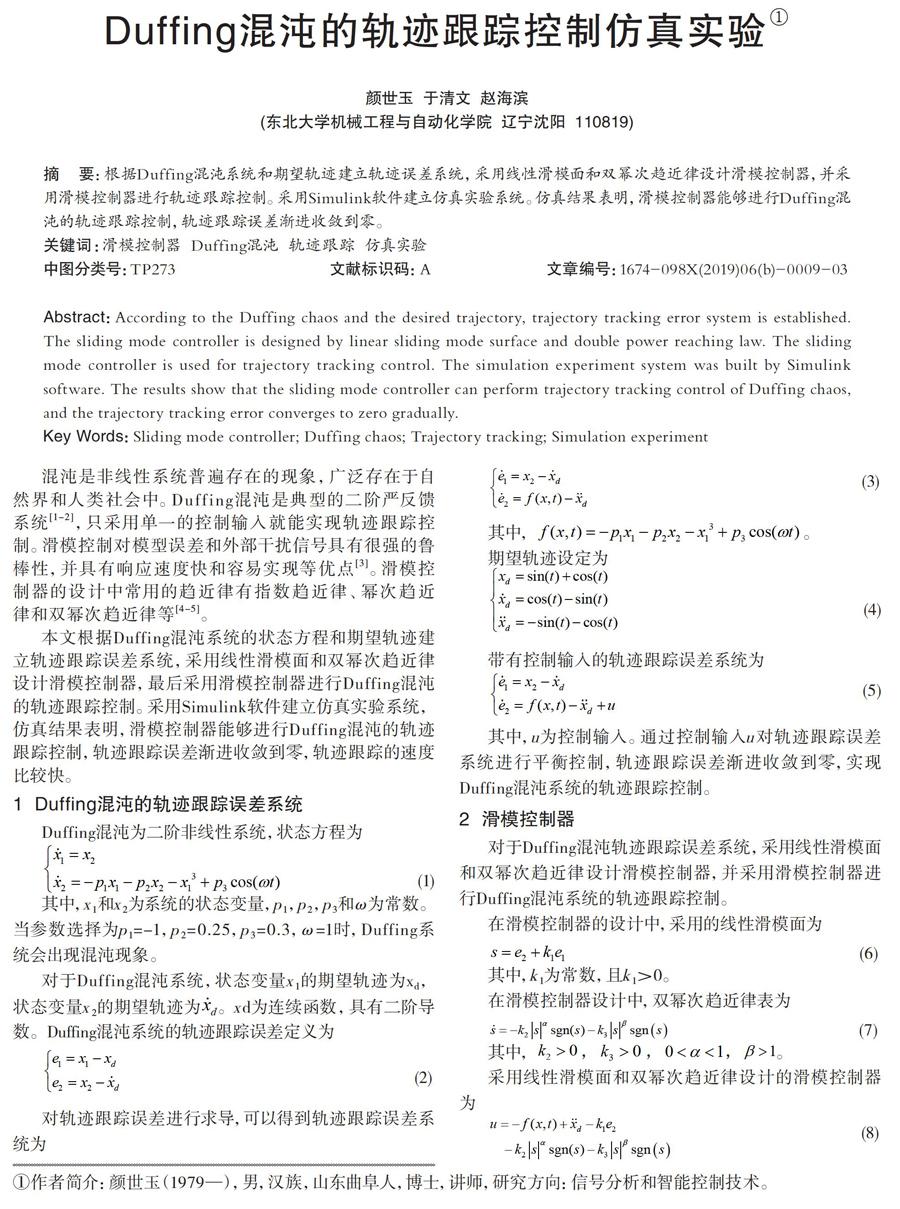
Simulink軟件是MATLAB軟件的重要組成部分,可以非常方便的進(jìn)行虛擬仿真實(shí)驗(yàn)[6]。本文采用Simulink中的MATLAB Function模塊和積分模塊等建立Duffing混沌的軌跡跟蹤控制仿真實(shí)驗(yàn)系統(tǒng),MATLAB Function模塊內(nèi)采用MATLAB語(yǔ)言進(jìn)行編程[7-8]。本文采用線性滑模面和雙冪次趨近律設(shè)計(jì)滑模控制器,只采用單一的滑模控制器進(jìn)行Duffing混沌系統(tǒng)的軌跡跟蹤控制,軌跡跟蹤誤差漸進(jìn)收斂到零。
采用Simulink軟件進(jìn)行Duffing混沌系統(tǒng)的軌跡跟蹤控制仿真實(shí)驗(yàn),采用變步長(zhǎng)的ode45算法,最大步長(zhǎng)為0.0001s,仿真時(shí)間為6s。Duffing混沌系統(tǒng)的初始狀態(tài)設(shè)定為,。期望軌跡的初始狀態(tài)為,。軌跡跟蹤誤差的初始狀態(tài)為,。Duffing混沌系統(tǒng)軌跡跟蹤控制的仿真實(shí)驗(yàn)系統(tǒng),如圖1所示。
在線性滑模面中,參數(shù)設(shè)定為k1=4。在雙冪次趨近律中,參數(shù)設(shè)定為k2=2,k3=2,α=0.6,β=1.4。滑模控制器的控制輸入,如圖2所示,采用雙冪次趨近律的滑模控制器比較平滑,沒有出現(xiàn)抖振現(xiàn)象。滑模面的響應(yīng)曲線,如圖3所示,滑模面快速收斂到零。軌跡跟蹤誤差的響應(yīng)曲線,如圖4所示,軌跡跟蹤誤差漸進(jìn)收斂到零,收斂的速度比較快。仿真結(jié)果表明,采用線性滑模面和雙冪次趨近律設(shè)計(jì)的滑模控制器能夠進(jìn)行Duffing混沌的軌跡跟蹤控制,軌跡跟蹤誤差漸進(jìn)收斂到零。
4 ?結(jié)語(yǔ)
本文根據(jù)Duffing混沌系統(tǒng)和期望軌跡建立軌跡跟蹤誤差系統(tǒng),采用線性滑模面和雙冪次趨近律設(shè)計(jì)滑模控制器,并采用滑模控制器進(jìn)行Duffing混沌的軌跡跟蹤控制。采用Simulink軟件建立仿真實(shí)驗(yàn)系統(tǒng),該仿真實(shí)驗(yàn)比較形象和直觀,有助于學(xué)生對(duì)混沌控制和滑模控制等的理論理解和工程應(yīng)用。
參考文獻(xiàn)
[1] 王曉東,楊紹普,趙志宏.基于改進(jìn)型Duffing振子的微弱信號(hào)檢測(cè)研究[J].動(dòng)力學(xué)與控制學(xué)報(bào),2016,14(3):283-288.
[2] 張菁,章文俊,宋萬(wàn)清. Duffing-Holmes振子在刀具磨損檢測(cè)中的應(yīng)用[J]. 輕工機(jī)械,2015,33(1):52-55.
[3] 劉金琨. 滑模變結(jié)構(gòu)控制MATLAB仿真(第3版)[M]. 北京:清華大學(xué)出版社,2015.
[4] 張合新,范金鎖,孟飛,等.一種新型滑模控制雙冪次趨近律[J].控制與決策,2013,28(2):289-293.
[5] 李慧潔,蔡遠(yuǎn)利.基于雙冪次趨近律的滑模控制方法[J]. 控制與決策,2016,31(3):498-502.
[6] 石良臣.MATLAB/Simulink系統(tǒng)仿真超級(jí)學(xué)習(xí)手冊(cè)[M],北京:人民郵電出版社,2014.
[7] 薛定宇.控制系統(tǒng)計(jì)算機(jī)輔助設(shè)計(jì)-MATLAB語(yǔ)言與應(yīng)用(第3版)[M]. 北京:清華大學(xué)出版社,2012.
[8] 趙海濱.MATLAB應(yīng)用大全[M].北京:清華大學(xué)出版社,2012.
