某型炮兵氣象雷達野戰標校系統?
2019-11-13 08:19:06馬林
艦船電子工程 2019年10期
關鍵詞:系統
馬 林
(陸軍炮兵防空兵學院士官學校 沈陽 110867)
1 引言
某型炮兵氣象雷達是一種測量大氣溫度、氣壓、濕度和風向、風速等氣象要素的野戰機動式氣象探測裝備。它通過被動接收無線電探空儀發出的探空信號實施探測,具有電磁隱蔽性好、保障能力強、探測高度高等優點[1]。由于是機動式裝備,所以占領新的探測陣地后,必須對雷達的方位角和仰角重新進行標校才能校正角度測量基準,保證角度測量的準確性。雷達標校方法主要有光學標校法和有源標校法[2],雖然雷達在野戰條件下可采用共同點法、反覘法[3-4]和北極星法等光學標校方法,但是受野戰條件限制,實施起來非常困難,難以保證測角精度。共同點法標校時需要利用雷達天線上的光學瞄準鏡和光學經緯儀瞄向同一標校物,但是野戰條件下很難找到適合的標校物,并且夜間無法進行準確標校。反覘法標校時需要利用雷達天線上的光學瞄準鏡和光學經緯儀互瞄,這種方法存在標校距離短,精度難以保證、夜間標校難度大、無法進行仰角標校等問題。北極星法標校時需要利用雷達天線上的光學瞄準鏡瞄準北極星,這種方法只能在晴空的夜間進行,受天氣影響大。
鑒于以上問題,利用北斗差分定位、多重調制和單片機等技術,設計一種野戰標校系統,對實現炮兵氣象雷達全天候野戰條件下的準確標校具有重要作用。
2 系統總體設計
2.1 標校原理
某型炮兵氣象雷達野戰標校系統的工作原理是:首先利用標校系統的北斗模塊測量獲取雷達天線方位和俯仰軸線交點大地坐標,然后利用系留探空氣球或其他方式將標校系統置于標定點。氣象雷達自動跟蹤標校系統發出的包含標定點坐標信息的高頻電磁波,使雷達天線電軸對準標定點。標校軟件將雷達接收到的標定點坐標變換為以雷達天線方位和俯仰軸線交點為原點的直角坐標系中的坐標,然后根據兩點的直角坐標計算雷達天線電軸指向標定點的準確方位角和仰角,與雷達方位角和仰角的測量值進行比較后得到系統誤差。最后將得到的方位角和仰角的系統誤差錄入雷達數據處理系統完成標校工作。
2.2 系統組成
某型炮兵氣象雷達野戰標校系統主要硬件和軟件兩大部分組成,其中硬件由主控模塊、北斗模塊、信號生成模塊、通信接口模塊和電源等組成,軟件主要包括標校軟件。如圖1所示。
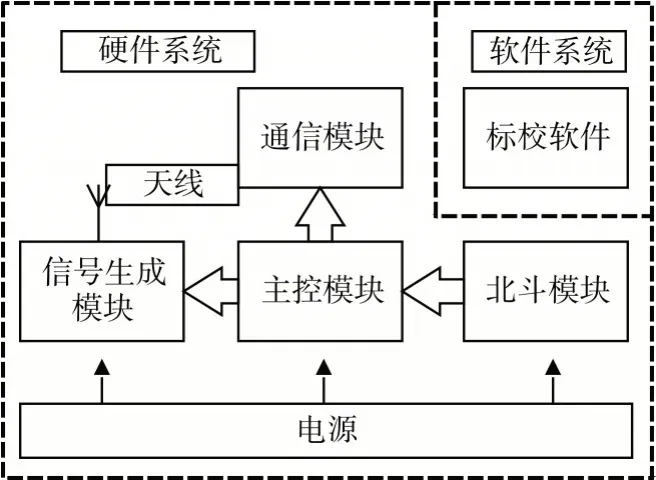
圖1 系統組成
北斗模塊主要用于接收北斗衛星信號,實現全天候實時定位和精準授時。主控模塊系統硬件的核心,主要對北斗模塊發送來的坐標和時間進行采集、編碼和通信管理,實現副載波的產生和系統時序控制。信號生成模塊主要用于產生某型炮兵氣象雷達能夠接收并解碼的包含坐標和時間等信息的特定頻率的信號。通信接口模塊采用串口通信協議,主要用于程序下載和向PC 機發送坐標數據。電源主要完成整個硬件系統的供電。標校軟件運行在氣象雷達的PC 機上,主要用于計算雷達天線電軸指向標定點的準確方位角和仰角,與雷達測量角度值比較得出方位角和仰角校準值。
3 硬件設計
3.1 主控模塊設計
主控模塊主要由ARM微控制器、外部FLASH、晶振電路、穩壓電路和復位電路等組成。ARM 選用意法半導體公司出品的32 位微控制器STM32F103RCT6,該微控制器基于ARM Cortex-M內核,時鐘頻率達到72MHz[5]。除具有豐富的接口之外[6~7],還內置低電壓檢測、調壓器、RC 振蕩器等,具有很高的集成度。主控模塊外部FLASH 選用W25X16芯片,與微控制器的SPI接口PA4~PA7實現數據交互。雖然微控制器內部包含了8MHz的振蕩器,但是為了保證系統時鐘更加準確和穩定,在微控制器的OSC32IN 和OSC32OUT引腳接入32.768kHz 晶振作為外部低速時鐘信號,在OSCIN和OSCOUT引腳接入8MHz晶振作為外部高速時鐘輸入信號。由于微控制器的供電要求為2.0V~3.6V,穩壓電路選用輸出電壓為3.3V 的AMS1117作為調壓芯片[8],并在其電源輸出端連接10μF 的電容,在微控制器的電源和地之間設置兩個電容進行濾波。主控模塊框圖如圖2所示。
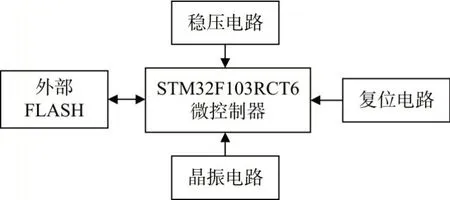
圖2 主控模塊框圖
3.2 信號生成模塊設計
信號生成模塊主要通過信號調制電路實現副載波和二進制代碼調制,通過功率放大電路實現載波信號調制和放大。微控制器將編碼后的二進制坐標代碼和定時器分頻得到的副載波方波送入以74LS08 與門為核心的調制電路。當二進制坐標代碼為正半周期時,受副載波調制形成周期變化方波;當二進制坐標代碼為負半周期時,與門輸出恒定負電壓。經過調制電路調制后的數字信號送入功率放大電路,通過改變晶體管的偏置電壓實現載波的調制和功率放大。當數字信號為“1”時,輸出頻率為f1,當數字信號為“0”時,輸出頻率為f0,從而使碼元轉換時刻兩個載波相位能夠保持連續。
3.3 通信接口模塊設計
通信接口模塊選用了CH340G 芯片作為USB轉串口芯片。CH340G 正常工作時需要外部向其XI 引腳提供12MHz 的時鐘信號[9~10]。雖然時鐘信號可以由CH340G 內置的反相器通過晶體穩頻振蕩產生,但是為了確保信號穩定可靠,在XI 和XO引腳之間連接一個12MHz 的晶振,并且分別為XI和XO 引腳設計了對地連接振蕩電容。CH340G 的5、6引腳分別接USB接口的D+和D-接口,2、3引腳分別接微控制器的USART 接口,通過CH340 的轉換作用實現串口和USB接口間的數據傳輸。
4 標校軟件設計
4.1 軟件流程
標校軟件的流程如圖3所示。
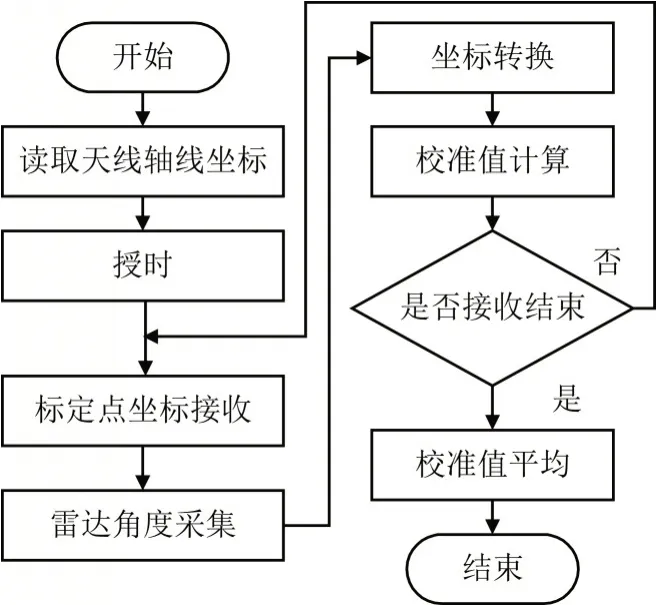
圖3 標校軟件流程
標校軟件啟動后,通過野戰標校系統的通信接口讀取測量獲得的天線方位和俯仰軸線交點大地坐標,并對雷達PC 機進行授時。野戰標校系統置于標定點,且雷達自動跟蹤后,實時接收標定點坐標數據的同時觸發采集雷達角度數據,通過坐標變換和校準值計算得到該組數據的角度差。經過多組數據計算后,對角度差進行算數平均得到雷達方位角和仰角的系統誤差。
4.2 坐標變換方法
氣象雷達采用左手站心直角坐標系,其原點o為天線方位和俯仰軸線交點,x軸指向坐標北,y軸指向坐標東,z軸與橢球法線向重合,指向天頂,如圖4所示。
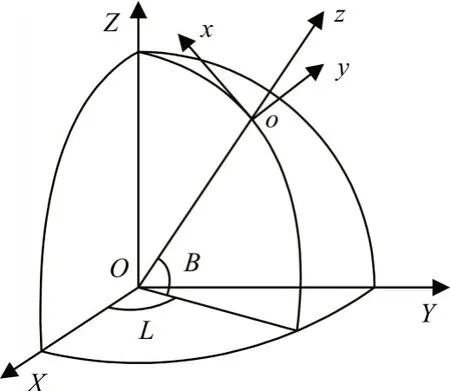
圖4 站心直角坐標系
坐標轉換時,首先將大地坐標系轉為地心空間直角坐標系。其轉換公式為
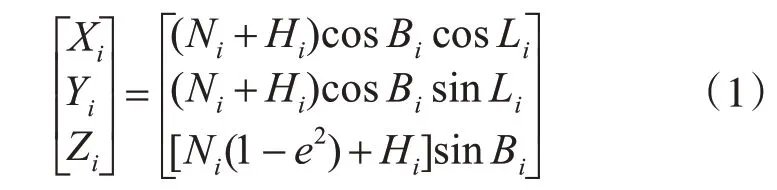
式中Bi,Li和Hi為大地坐標系中i點的緯度、經度和高程,Ni為過i 點的卯酉圈曲率半徑,e2為第一偏心率平方,在CGCS2000 坐標系中,e2=0.006694380022900788[11]。
轉換為地心空間直角坐標系后,利用布爾沙坐標轉換模型[12~13]將坐標轉換為右手站心直角坐標系,最后將x軸取負得到轉換公式為

式中B0,L0和H0分別為雷達天線方位和俯仰軸線交點在大地坐標系中的緯度、經度和高程坐標。
4.3 校準值計算方法
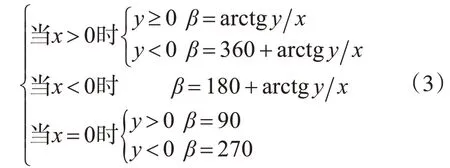
利用標定點在站心直角坐標系中的坐標可以得到雷達電軸準確的方位角和仰角。
方位角計算公式為
仰角計算公式為

雷達電軸準確的方位角、仰角和雷達測量的方位角、仰角分別作差可得到標校值。
5 結語
本文詳細介紹了某型炮兵氣象雷達標校系統的標校原理和系統組成,分別就系統硬件和軟件的設計進行了具體介紹。該系統可有效解決目前野戰標定方法存在的標校點少、夜間標校難度大、精度低等問題,對提高某型炮兵氣象雷達全天候標定能力具有重要意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
