基于虛擬觀測值的偽距差分方法研究
2019-11-12 02:15:06趙亞枝谷守周秘金鐘劉一陳沖
全球定位系統 2019年5期
趙亞枝,谷守周, 秘金鐘,劉一,3,陳沖
(1.山東科技大學 測繪科學與工程學院,山東 青島 266590;2.中國測繪科學研究院,北京 100830;3.海軍工程大學 導航工程系,湖北 武漢 430000)
0 引 言
偽距差分服務是當前應用最廣的實時高精度定位服務.隨著高精度定位技術的發展,高精度定位需求逐漸由行業需求轉為大眾需求.隨著用戶數量增多,計算壓力增大,傳統偽距差分服務模式不適用大量用戶并發接入服務[1-2].
當前偽距差分服務分為兩種模式,播發偽距改正數模式與播發觀測值模式[3].播發偽距改正數的模式目前由于尚無北斗衛星導航系統(BDS)標準格式,無法兼容BDS.播發觀測值的模式需要向用戶同時播發基準站的坐標信息[4],導致基準站信息泄漏,與我國現行基準站管理法規相關規定不符,不適用于大范圍提供服務.傳統服務模式已不能滿足當前大眾位置服務的需求.
針對偽距差分服務當前存在的問題,本文在服務端提出利用局域連續運行參考站系統(CORS)網數據,生成虛擬格網偽距觀測值,并向用戶實時播發數據.由于顧及到參考站位置對于差分信息的影響,精度與多站差分相當[5-6].基于虛擬格網偽距觀測值的偽距差分方法改進了多基準站偽距差分定位方法,該方法不僅能夠保留多站差分的定位精度與高可靠性、格網差分的大量用戶接入的優點、兼容BDS,而且能夠有效保護我國基準站信息.
1 基于虛擬格網偽距觀測值偽距差分方法
虛擬格網偽距觀測值是利用一定區域內星歷誤差、衛星鐘差、電離層延遲、對流層延遲等誤差具有較好的時空相關性,這些誤差對這一區域內接收機的影響大體相同[7].然后將基準站影響定位的各項誤差分離及分類,將各類誤差按照不同的處理策略處理得到格網中心點處綜合誤差項,進而得到該位置虛擬觀測值[8-10],向用戶實時播發.
1.1 格網改正數生成
誤差的分類處理是虛擬觀測值生成的關鍵,主要誤差項包括衛星鐘差、地球自轉引起的誤差、對流層延遲誤差、相對論效應、電離層延遲誤差以及殘余誤差項[11].按照處理方案將誤差分成兩類,第一類包含衛星鐘差、相對論效應和地球自轉誤差與衛星、衛星位置、站點位置相關的誤差,其余誤差項分為第二類.
格網改正數生成分為2個步驟:
1)各基準站偽距改正數生成;


(1)
式中:di,bi為格網中心點Gk與各基準站Bi的距離與反距離值;b為參與格網虛擬站點計算的反距離值之和;ai為Bi基準站內插格網中心點Gk所占權重.
由式(1)可知,ai滿足以下條件:

(2)


(3)
1.2 虛擬偽距觀測值生成
格網中心點偽距綜合改正數生成后,虛擬站點坐標已知,結合廣播星歷可準確求出虛擬站點與衛星的衛地距、相對論效應、衛星鐘差、地球自轉引起的誤差,將接收機鐘差置零處理[13].即可恢復虛擬站點處偽距觀測值.
(4)

1.3 虛擬觀測值偽距差分
流動站進行單點定位粗略確定所在格網,并通過網絡接收所在格網中心點的虛擬偽距觀測值和站點坐標,實現偽距差分定位.

(5)
單差偽距一般表示站間一次差,站間差分可以直接消除衛星鐘差的影響,當基線距離較近時對流層與電離層的影響幾乎相同,所以電離層與對流層誤差也幾乎消除[14].單差偽距觀測方程為

(6)

雙差偽距表示在單差偽距的基礎上進行星間差分,由式(6)可得兩顆衛星的單差偽距觀測方程:
(7)
式(7)中上標j、i表示不同衛星.兩式相減消去接收機相關誤差得到雙差偽距觀測方程:
(8)
在生成虛擬偽距觀測值的基礎上對影響虛擬觀測值生成與服務的主要因素進行分析,得出偽距虛擬觀測值差分定位服務最佳配置.其中主要影響因素包括,基準站間距、基線距離、虛擬站點高程選取方法[15].
2 試驗分析
2.1 數據
利用湖南CORS網選取79個基準站,基準站平均間距60 km,接收機均采用Trmible R9接收機,觀測環境良好.流動端采用華晨北斗CC20雙模(BDS+GPS)單頻手持接收機于長沙市內采集數據.
2.2 數據分析
2.2.1 基準站間距
本試驗分析基準站間距對于偽距差分的影響.挑選基準站間隔為60 km、100 km、180 km;搜索范圍分別設為90 km、150 km、200 km,以保證各個間距的網均能夠搜索到足夠的基準站;生成按經緯度劃分1°×1°的格網,基線距離15 km.將三種情況下生成的虛擬偽距觀測值進行實時偽距差分定位測試結果與真實坐標對比得出N、E、U方向定位殘差,如圖1所示.統計結果見表1.并對測試數據的N、E、U方向平面精度超過1 m、垂直精度超過1.5 m數據量與百分比進行統計,如表2所示.



圖1 偽距差分定位殘差序列圖
表1 誤差統計

站間距/kmRMS/m NEU平面三維 600.1800.1400.4680.2280.521 1000.6130.5711.4480.8381.673 1800.6620.8411.5581.0701.890

表2 超限數據統計
根據表1數據分析,可以得出基準站平均為60 km、100 km時平面與垂直方向均符合要求;基準站為180 km時平面與垂直方向均超限.從表2可以看出,基準站為60 km時垂直僅有1個數據超限,站全部歷元數的0.3%;基準站為100 km、180 km時平面超限歷元數占全部歷元20%~25%;100 km時垂直超限歷元數較60 km時顯著增多,達到32.7%,180 km時達到61.46%,超過一半歷元.
綜上所述,基準站60 km時能達到最優的差分定位性能,能滿足平面優于1 m、垂直優于1.5 m定位需求.我國基準站網建設除西北部分地區外均能滿足要求,東部地區基準站平均間距在10~30 km,大部分地區均能夠達到用戶定位需求.
2.2.2 基線距離
由試驗1的結果可知基準站平均間距60 km實時差分效果最佳,所以本試驗選取平均間距為60 km的基準站網與90 km搜索范圍生成格網點虛擬偽距觀測值,基線距離為30 km、60 km、120 km來測試格網偽距差分的定位性能;通過變換格網中心點位置達到控制基線距離的目的.實時偽距差分殘差序列如圖2所示.統計結果如表3所示.
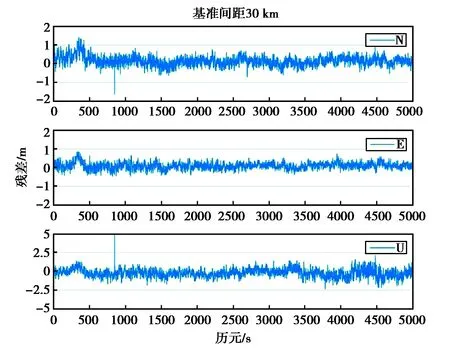

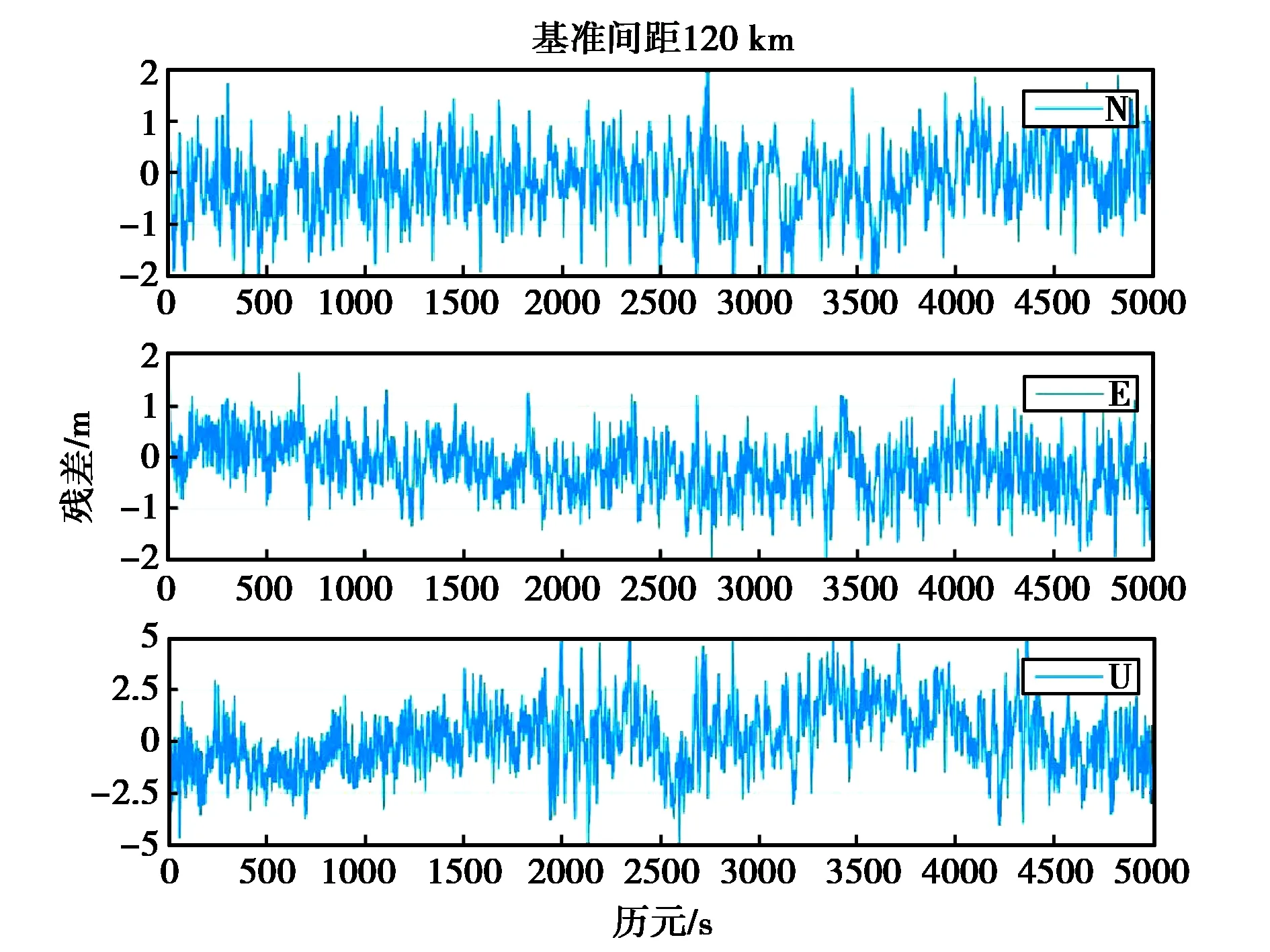
圖2 偽距差分定位殘差序列圖
表3 誤差統計

基線長度/kmRMS/m NEU平面三維 300.2900.2040.5800.3540.680 600.4990.3160.5660.5910.818 1200.7090.5951.6720.9261.911
通過表3可知基線距離為30 km、60 km時定位精度均滿足平面優于1 m,垂直優于1.5 m的定位精度.基線距離為120 km時平面定位精度滿足要求,垂直方向超限.垂直方向精度隨基線長度增大定位精度下降明顯,平面下降較平緩.說明在基線長度達到120 km的時候時空相關性下降明顯.綜上所述,基線距離為30 km、60 km、120 km分別對應格網劃分的0.5°×0.5°、1°×1°、2°×2°格網的邊緣,所以在步長為0.5°和1°均滿足要求.
2.2.3 虛擬參考站高程
本試驗目的在于探索虛擬參考站高程選取對于差分服務性能的影響.實驗設計基準站平均間距60 km、格網劃分1°×1°,服務端分別同時生成與流動站高程差為0 m、50 m、100 m的格網中心點處虛擬偽距觀測值,流動端測試設備為CC20手持機,基線距離15 km.實時偽距差分殘差序列如圖3所示.統計結果如表4所示.



圖3 偽距差分定位殘差序列圖
表4 誤差統計

高差/mRMS/m NEU平面三維 00.1800.1400.4680.2280.521 500.2870.1940.7360.3470.814 1000.2570.4660.9730.5321.109
通過表4可以得出,虛擬站點高程與流動站高程相同時定位性能最好,隨高差增大平面定位精度略有下降,垂直方向定位精度下降明顯.總體定位精度還滿足平面優于1 m、垂直優于1.5 m的設計精度.
綜上所述,虛擬站點高程選取時要盡量與流動站高程接近,一般CORS站高程能代表格網區域內的高程,所以這里選取格網周圍CORS站平均高程作為虛擬站點高程進行差分定位服務.
3 結束語
面對基準站坐標涉密不能傳輸、偽距改正數模式標準格式無法兼容BDS與大用戶量并發服務等問題,提出了基于虛擬格網偽距觀測值的偽距差分方法,從基準站間距、基線距離、虛擬參考站高程方面分析,綜合考慮定位精度、可靠性等因素,在定位精度為平面優于1 m、垂直優于1.5 m的定位需求時,基準站平均間距60 km,格網劃分大小為1°×1°,選取該地區平均高程作為虛擬站點高程即可滿足要求.
