BDS RTK/MEMS-INS組合數學模型研究與性能分析
2019-11-12 02:10:16劉崇錦高周正涂銳張睿韓軍強盧曉春
全球定位系統 2019年5期
劉崇錦,高周正,涂銳,4,張睿,韓軍強,盧曉春,4
(1.中國科學院國家授時中心,陜西 西安 710600;2.中國科學院大學 電子電氣與通信工程學院,北京 100049;3.中國地質大學(北京)土地科學技術學院,北京 100084;4.中國科學院精密導航定位與定時技術重點實驗室,陜西 西安710600)
0 引 言
全球導航衛星導航系統(GNSS)利用衛星無線電信號進行導航、定位、授時,主要由美國GPS、俄羅斯GLONASS、中國北斗衛星導航系統(BDS)、歐盟Galileo四大全球系統和日本QZSS、印度IRNSS兩大區域系統組成.BDS是中國自主研發、擁有完全知識產權、自主可控的衛星導航系統,相較于其他GNSS,采用了地球靜止同步衛星(GEO),地球傾斜軌道同步衛星(IGSO)和中地軌衛星(MEO)的混合星座,并擁有短報文通信能力,其在國民經濟和國防建設中扮演著重要角色.近年來,BDS發展迅速,并將于2020年前后實現全球服務[1].BDS定位精度高,精度均勻穩定,是當前主要的位置服務手段之一.實時動態載波相位差分定位(RTK)技術通過進行雙差模式的基線解算,消除或減弱了鐘差和大氣誤差的影響,可以極大提高BDS的定位精度.但BDS與其他衛星導航系統一樣,有著動態性能差、數據頻率低、導航信息少、抗干擾能力差的缺點.慣性導航系統(INS)技術不需要外部信息,抗干擾能力強,能提供高頻、豐富、穩定的導航信息[2],但傳統INS體積大,價格昂貴,難以大規模使用.自21世紀以來微機電系統(MEMS)高速發展,低成本INS的性能不斷提升,使BDS+低成本INS的組合擁有了較高的實用性[3-4].兩系統優劣互補,進行組合能在移動測繪、車輛導航、航空航天等領域發揮重要作用[5].因此,國內外對BDS RTK+低成本INS的組合進行了相關研究.其中,韓厚增[6]對慣導輔助下的BDS/GPS精密定位模型進行了研究;Li Wei[7]研究了車載條件下BDS RTK的模糊度固定及與INS緊組合算法;Li Tuan[4]研究分析了單頻RTK與低成本INS進行緊組合的算法與性能.這些研究結果表明BDS RTK精度與GPS RTK接近,而低成本INS在BDS RTK不可用時能提供較可信的結果[6].但這些研究多集中在BDS不可用時組合導航系統的性能,而較少對BDS可用時細致的性能分析.此外,除了定位精度外,運載體的導航對速度和姿態精度也有著實際的需求[8].
因此,本文首先推導了BDS RTK與INS緊組合的量測模型與狀態模型,在此基礎上進行BDS+低成本INS實地跑車測試.通過對實測數據進行不同的組合模式解算,對不同組合方案的定位、測速、定姿精度進行了評價分析,并對比了各組合方案的性能.
1 BDS RTK/INS緊組合模型
BDS RTK/INS緊組合模型主要由BDS模塊、INS模塊、卡爾曼濾波器組成.該模型首先進行BDS、INS模塊解算,再將兩模塊的結果輸入卡爾曼濾波器進行組合,輸出載體的姿態、速度、位置信息并進行反饋,完成閉環組合導航流程.其中INS模塊根據慣性傳感器輸出的觀測量δv、δθ進行INS機械編排,完成姿態、速度、位置的更新計算;BDS模塊使用基站、流動站數據計算雙差偽距和雙差載波相位觀測值,與INS推算的虛擬觀測值求差,作為量測更新的新息;卡爾曼濾波模塊對當前狀態進行最優估計,輸出改正后的姿態、速度、位置等導航參數并對慣性傳感器進行反饋修正,完成閉環[9].其全過程如圖1所示.
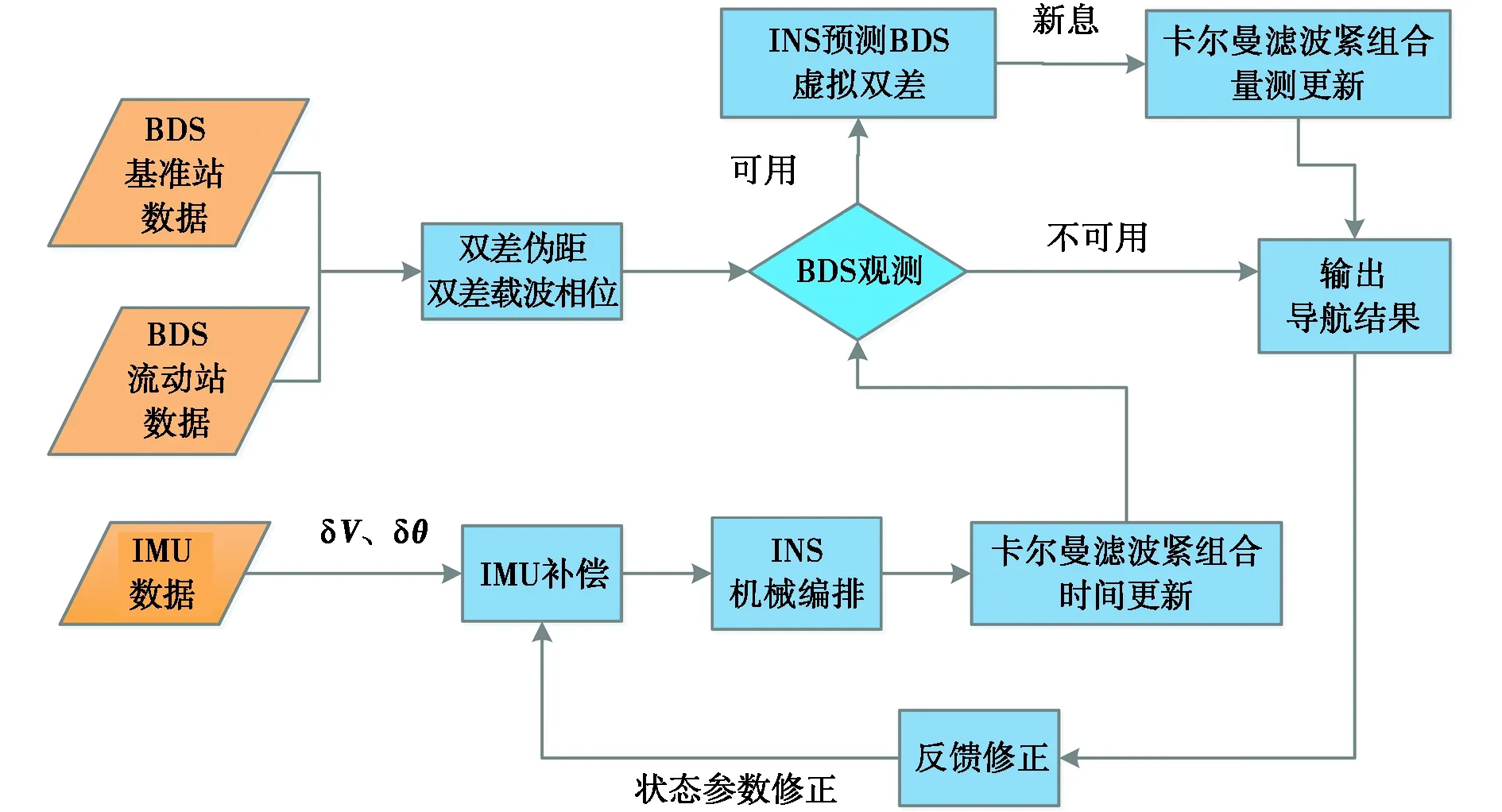
圖1 BDS RTK/INS 緊組合模型
1.1 狀態方程
本文采用當地直角坐標系(n系)作為參考坐標系,原點為載體中心,x軸指向地理北向,z軸向下指向參考橢球面,y軸垂直于x軸、z軸形成的平面并取右手坐標系,即北東地(N-E-D)坐標系.載體坐標系采用前右下(F-W-D)坐標系,x軸指向載體運動方向,y軸指向載體右方,z軸指向載體下方.本文是基于低精度MEMS的研究,其陀螺精度較低,無法敏感到地球自轉信息,故φ角誤差模型可以進行相應簡化[10]:

(1)
慣性傳感器誤差包括陀螺、加速度計的零偏誤差和比例因子誤差.對于低精度MEMS級別的傳感器,通常采用一階高斯-馬爾科夫過程進行建模,相比與隨機常值模型,可提升組合系統的抗干擾能力[8].故本文傳感器誤差使用如下一階高斯-馬爾科夫過程描述[11]:
(2)
式中:δb、δs為零偏誤差和比例因子誤差;τb、τs為零偏誤差和比例因子誤差的一階高斯-馬爾科夫過程相關時間;wb、ws為相應的驅動白噪聲.本文所使用的陀螺和加速度計均為三軸,因此傳感器誤差共有12維.姿態、速度、位置誤差和傳感器誤差構成了21維的誤差狀態方程:

(3)
式中:F為狀態轉移矩陣,其形式參考文獻[12];xINS為誤差狀態向量,其具體形式為
xINS=[δpcδvcδφδbgδbaδsgδsa]T,
(4)
G為噪聲驅動矩陣;w為驅動白噪聲.
在BDS RTK/INS組合中,將雙差模糊度作為增廣狀態量,完整的狀態向量為

(5)
式中:xINS為誤差狀態向量;ΔN為雙差模糊度.
1.2 量測方程
BDS RTK/INS緊組合的觀測信息由實際觀測的BDS雙差觀測值與INS預測BDS雙差觀測值之差構成.首先使用基站和流動站的觀測數據求差,計算雙差偽距、雙差偽距率、雙差載波相位,再與慣導推算的虛擬觀測值求差,作為量測更新的觀測量[13]:

(6)

在短基線定位中,通過差分可以較好地消除對流層和電離層的影響[12],其載波相位觀測方程為

(7)
INS計算的虛擬觀測距離可表示為

(8)
式中:ek、ej為流動站對衛星的視線向量;δre為地心地固坐標系下的位置誤差向量.將式(7)和(8)相減,可得量測更新中的載波相位觀測量δzφ為
(9)
同理,偽距觀測量δzp為
δzP=(ek-ej)·δre.
(10)
在接收機能接收多普勒觀測值的情況下,可利用多普勒觀測值構成偽距率觀測量,通過與INS計算的虛擬偽距率求差,作為量測新息進行計算[14].雙差偽距率量測方程為

(11)
式中,δve為地心地固坐標系下的速度誤差向量.
該類偉晶巖主要分布在靠近花崗巖體的變質巖中,其規模不大,多呈透鏡狀,其交代作用較弱,礦化較差,還可見黑云母、白云母,局部發育有絹云母化。
綜合三種觀測量, BDS RTK/INS緊組合的觀測方程可表示為
Z=HX+V,
(12)

H=
其中:D為位置誤差向量的設計矩陣;E為速度誤差向量的設計矩陣;C1為地心地固坐標系到NED坐標系的誤差轉換矩陣;C2為IMU質心到BDS天線相位中心的桿臂補償項;n為雙差個數.各項詳細推導計算可參考文獻[13-14].
2 BDS RTK/INS組合導航系統性能分析
為評估低成本慣性器件在BDS RTK/INS組合系統中的表現,于2019年6月9日在武漢市郊進行了約40 min的跑車測試,其軌跡如圖2所示.慣性器件使用某款典型的低成本MEMS-IMU,采樣率為200 Hz,其主要性能如表1所示.基準站使用雙頻Novatel接收機,采樣率為1 Hz,基線長度約為10 km.數據處理時,設置衛星高度角截止角為15°.

圖2 測試軌跡圖
表1 MEMS-IMU主要參數
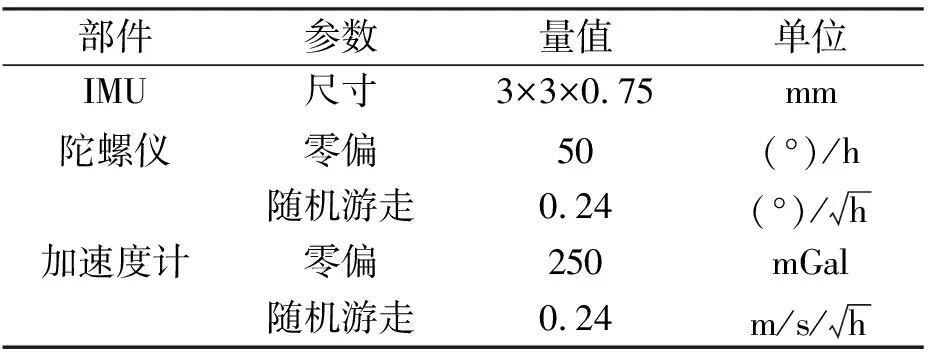
部件參數量值單位IMU陀螺儀尺寸零偏3×3×0.7550mm (°)/h隨機游走0.24(°)/h加速度計零偏250mGal隨機游走0.24m/s/h
圖3和4表示本次實驗過程中BDS可用衛星數和對應的PDOP值情況.所有歷元衛星數均在4顆以上,有83.5%的歷元衛星數大于8顆;99.2%的歷元PDOP值小于4.說明本試驗觀測條件整體較好.在1587~1876 s的289個歷元內,可見衛星數減少為6顆,PDOP值也大幅上升.由于該時段路徑兩旁有建筑物,可能形成遮擋造成可見星數下降并影響星座幾何構型.
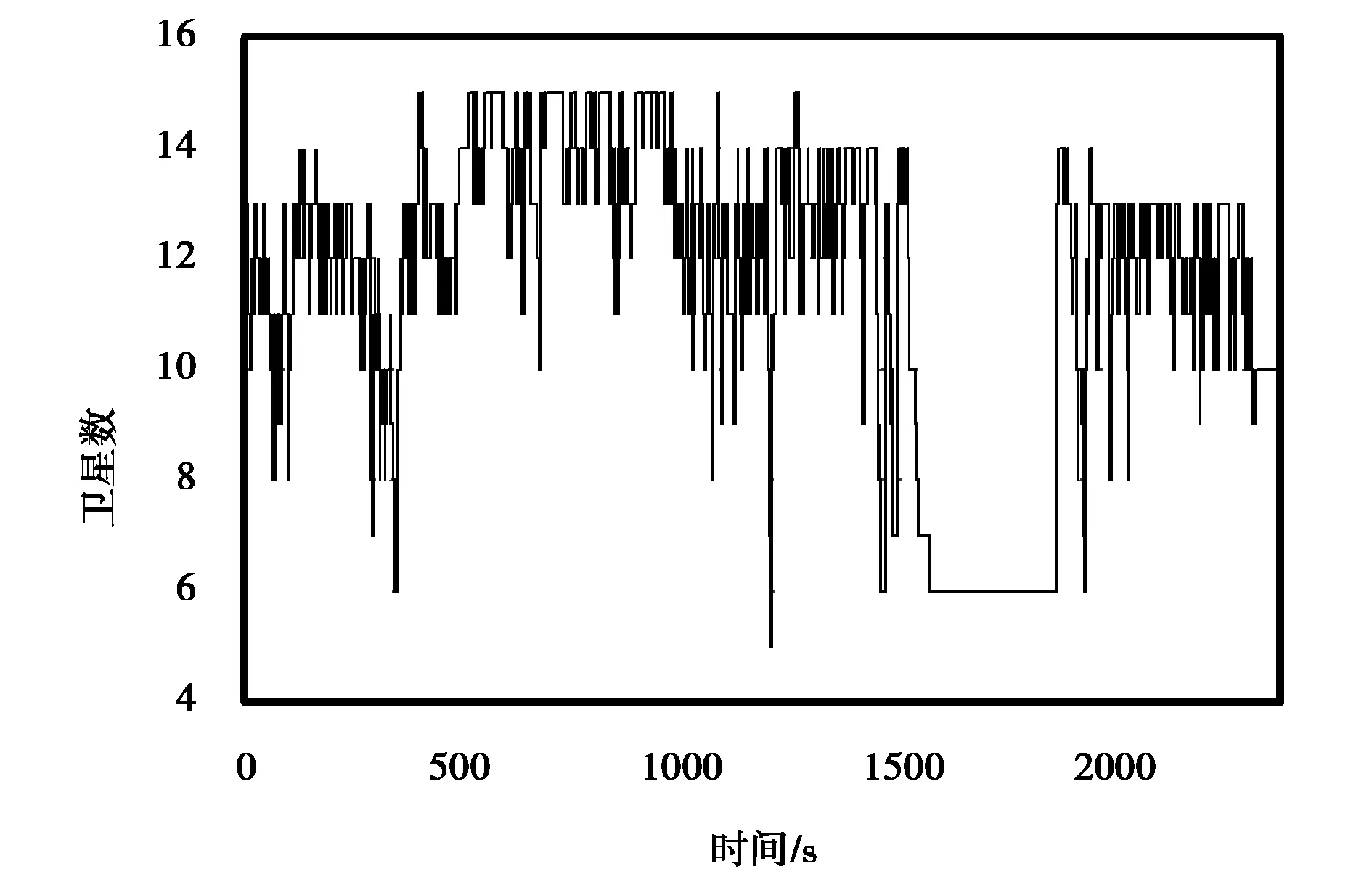
圖3 觀測時段衛星數
2.1 數據處理策略
本文主要測試分析正常工作情況下,低成本慣性器件(IMU)對組合導航系統的影響,故未進行信號中斷測試.由于IMU精度較低,理論上在RTK級別的高精度定位中貢獻較小,故主要從測速、測姿角度進行分析.本文采用的數據處理策略如下:
1)使用雙頻雙模GNSS數據與INS數據進行雙向平滑緊組合解算,作為試驗的參考真值,以此為基準對組合導航系統性能進行評估.
2)分別使用BDS單頻、雙頻數據,與INS數據進行松、緊組合解算,共有BDS單頻,BDS單頻松組合、BDS單頻緊組合、BDS雙頻、BDS雙頻松組合、BDS雙頻緊組合六種組合方案,分別計算各組合導航模式的位置、速度、姿態,作為實際應用條件下BDS RTK+低成本INS組合的表現并進行后續分析.
3)將BDS單頻、雙頻不同組合方式的實測結果與參考真值的速度、位置、姿態求差,分析不同組合方式的性能.
2.2 BDS RTK/INS定位精度分析
本試驗分別使用BDS 單頻、雙頻數據,與INS數據進行松、緊組合解算,獲得相應組合方案的定位結果,再與參考值求差,評價相應組合方案的定位精度.圖5、6示出了BDS單頻RTK+INS的定位結果,圖7、8示出了BDS雙頻RTK+INS的定位結果.在1587~1876 s,BDS單頻RTK及BDS單頻RTK松組合出現了一段時間的跳變,與衛星數及PDOP值惡化的時間段一致,故這一時段可能由于衛星數不足,衛星幾何構型變差,造成定位精度下降.
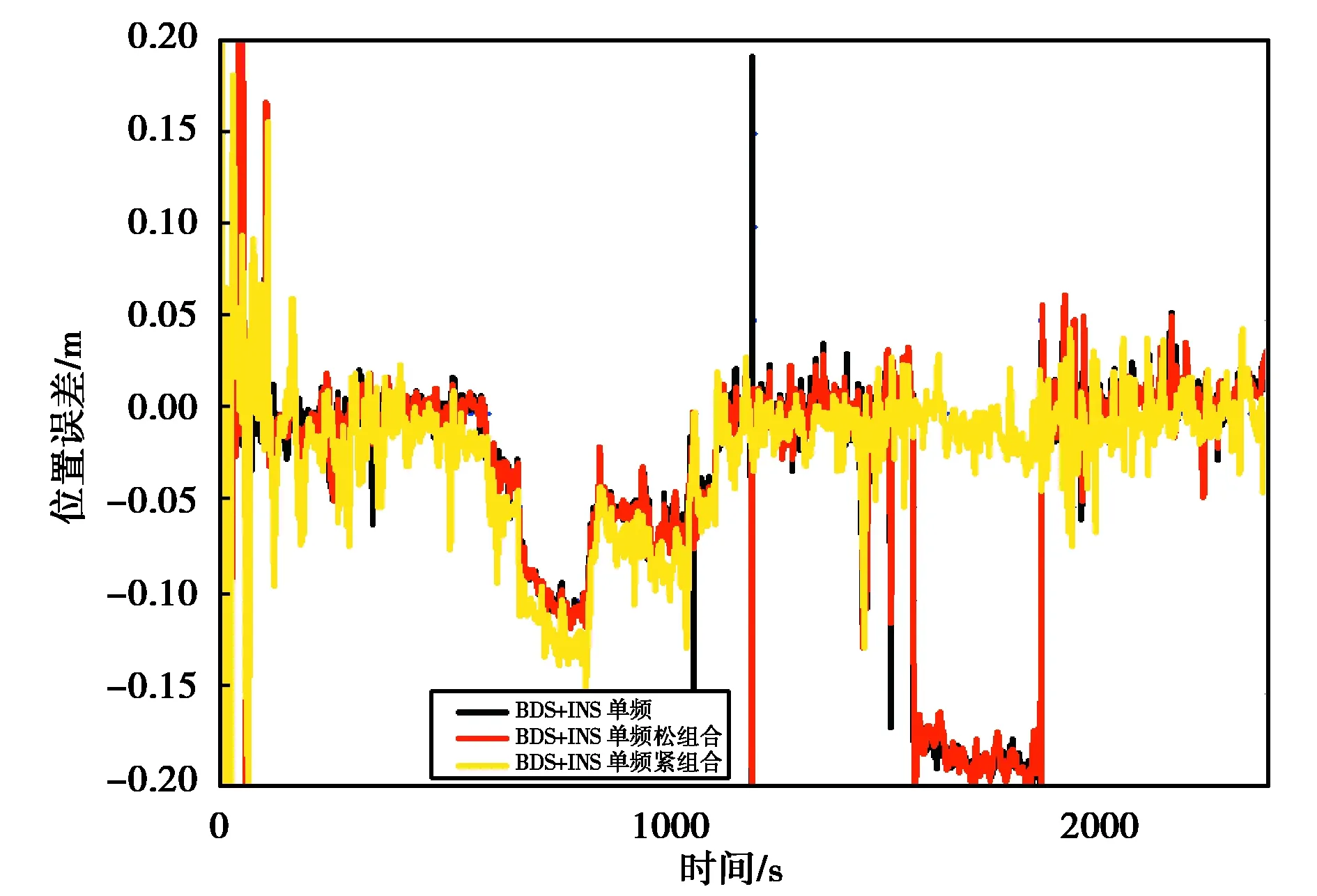
圖5 單頻BDS和INS融合定位東向誤差
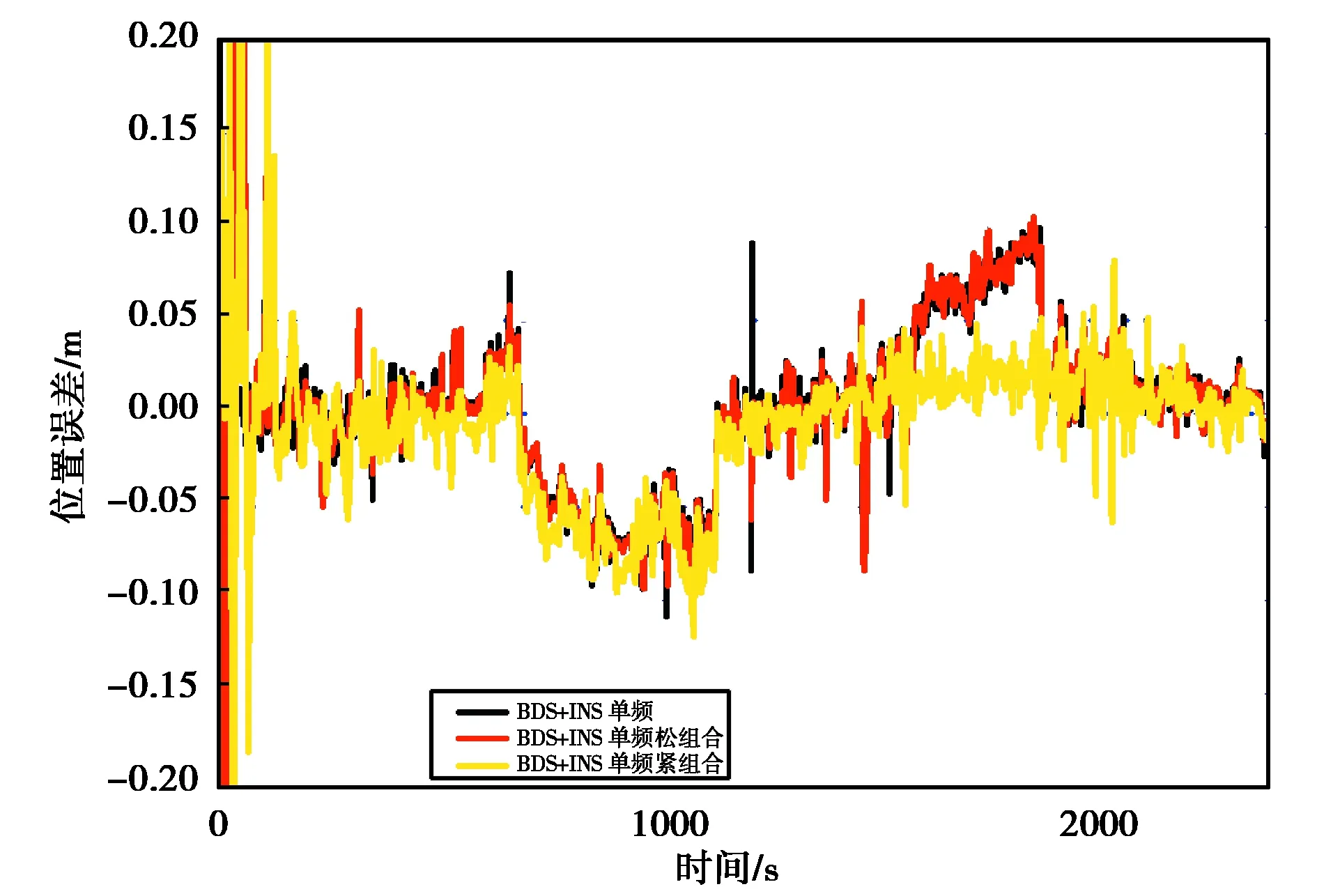
圖6 單頻BDS和INS融合定位北向誤差
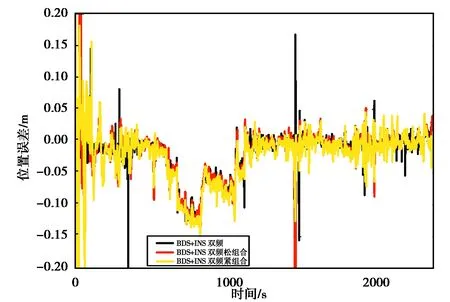
圖7 雙頻BDS和INS融合定位東向誤差
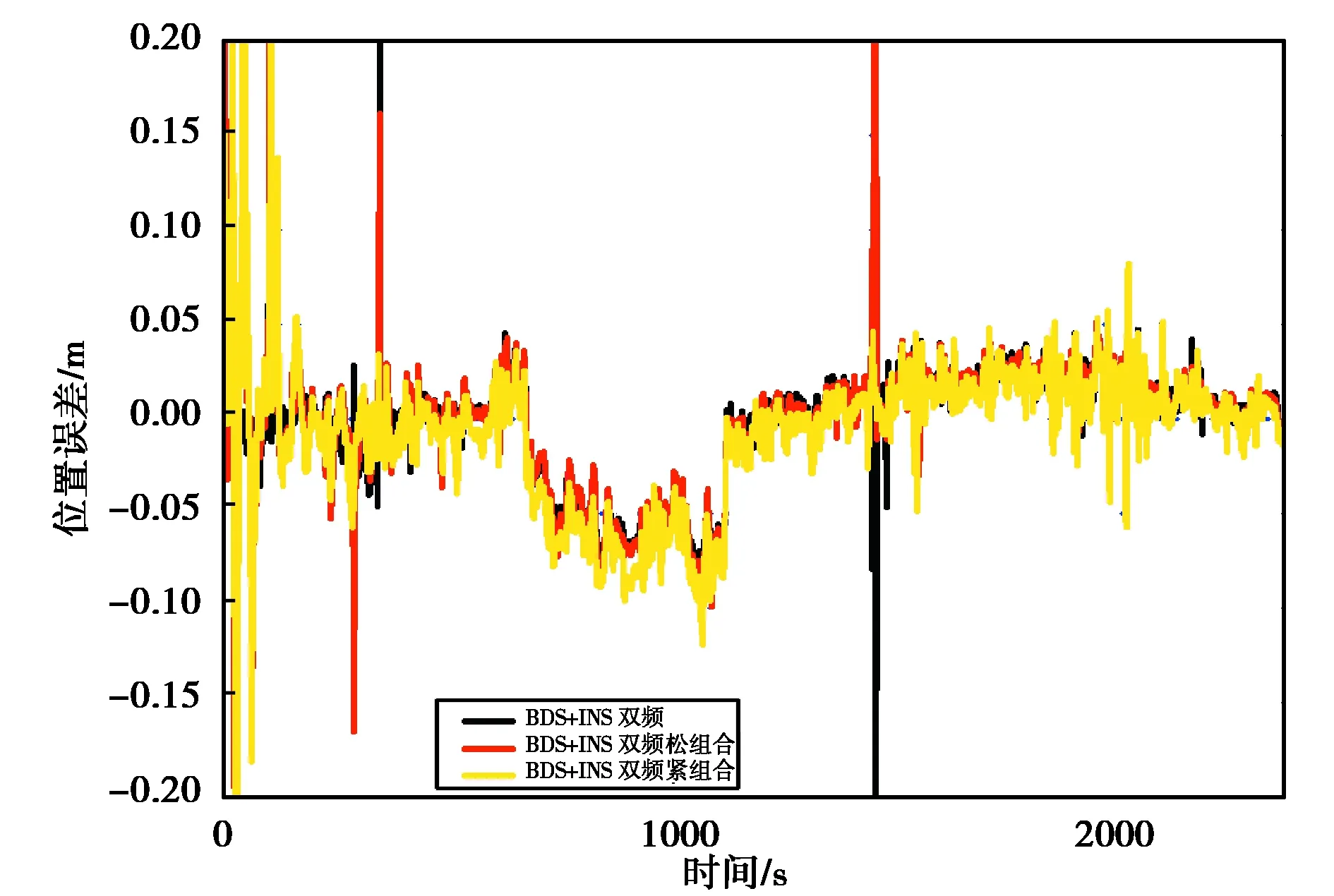
圖8 雙頻BDS和INS融合定位北向誤差
表2示出了各組合方式相對于參考值的定位誤差.可以看出,當采用同一頻率設置的衛星數據時,各慣導組合方式間定位精度基本相近,同一頻率設置間各組合方式定位誤差在mm量級,這在低成本車載導航中是可以忽略的.此外雙頻定位結果優于單頻定位結果,在RTK、松組合、緊組合三種方案中,定位誤差RMS分別在東向改善了45.9%、38.7%、42.1%;在北向改善了17.9%、10%、24.4%.此外,當出現跳變時,緊組合方式能較好地減小誤差,穩定性較好,這與理論是相一致的.試驗結果表明,在松、緊組合方式下,低成本IMU的引入對定位精度影響較小.
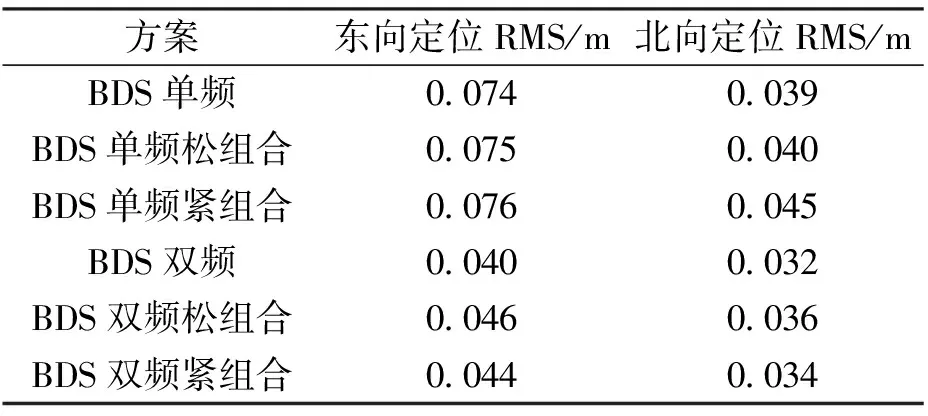
表2 不同組合方式定位精度
2.3 BDS RTK/INS測速精度分析
本試驗分別使用BDS單頻、雙頻數據,與INS數據進行松、緊組合解算,獲取相應組合方式的速度,再與參考值求差,以此評價相應組合方案的測速精度.圖9~11示出了BDS單頻數據與INS進行組合的速度誤差.在松組合模式下,相對于BDS測速,加入低成本IMU使組合系統在北、東、地方向RMS分別改善了65.9%、5.7%、57.1%.而在緊組合模式下速度精度提高更為明顯,在北、東、地方向RMS分別改善了75.8%、79.5%、66.7%.圖12~14示出了BDS雙頻數據與INS進行組合的速度誤差,各組合方式的表現基本與單頻一致.表3示出了BDS單雙頻數據與INS組合相對參考值的速度誤差,可以看出即便是低精度MEMS-IMU,在與BDS組合后也能對測速精度有較大的改善.此外,單頻數據+低成本INS的兩種組合方式均有較好的性能,且相對雙頻數據差距較小,可構成單頻BDS+低成本INS的低成本組合導航系統,有較高的實用價值.
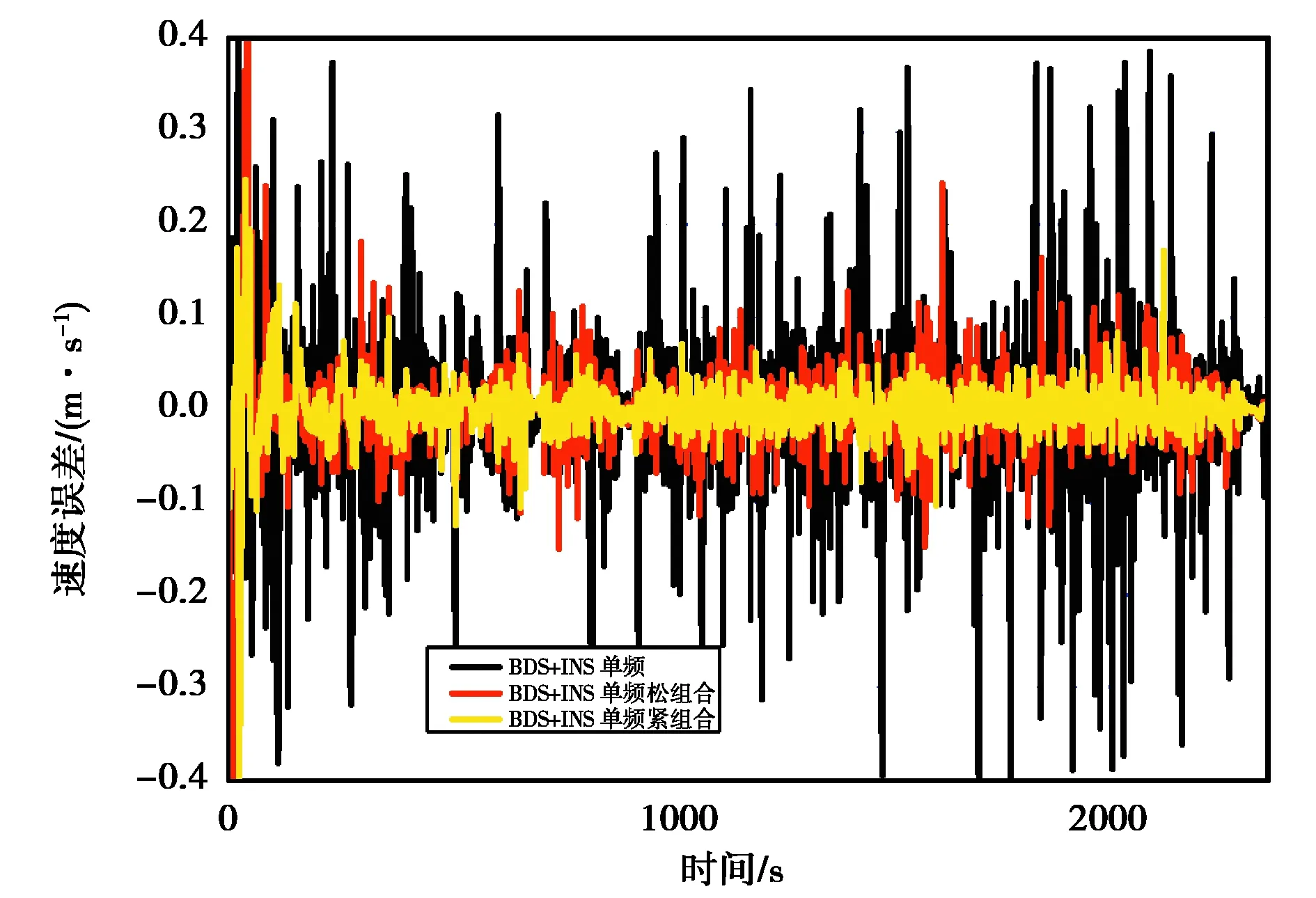
圖9 單頻BDS和INS融合測速N向誤差
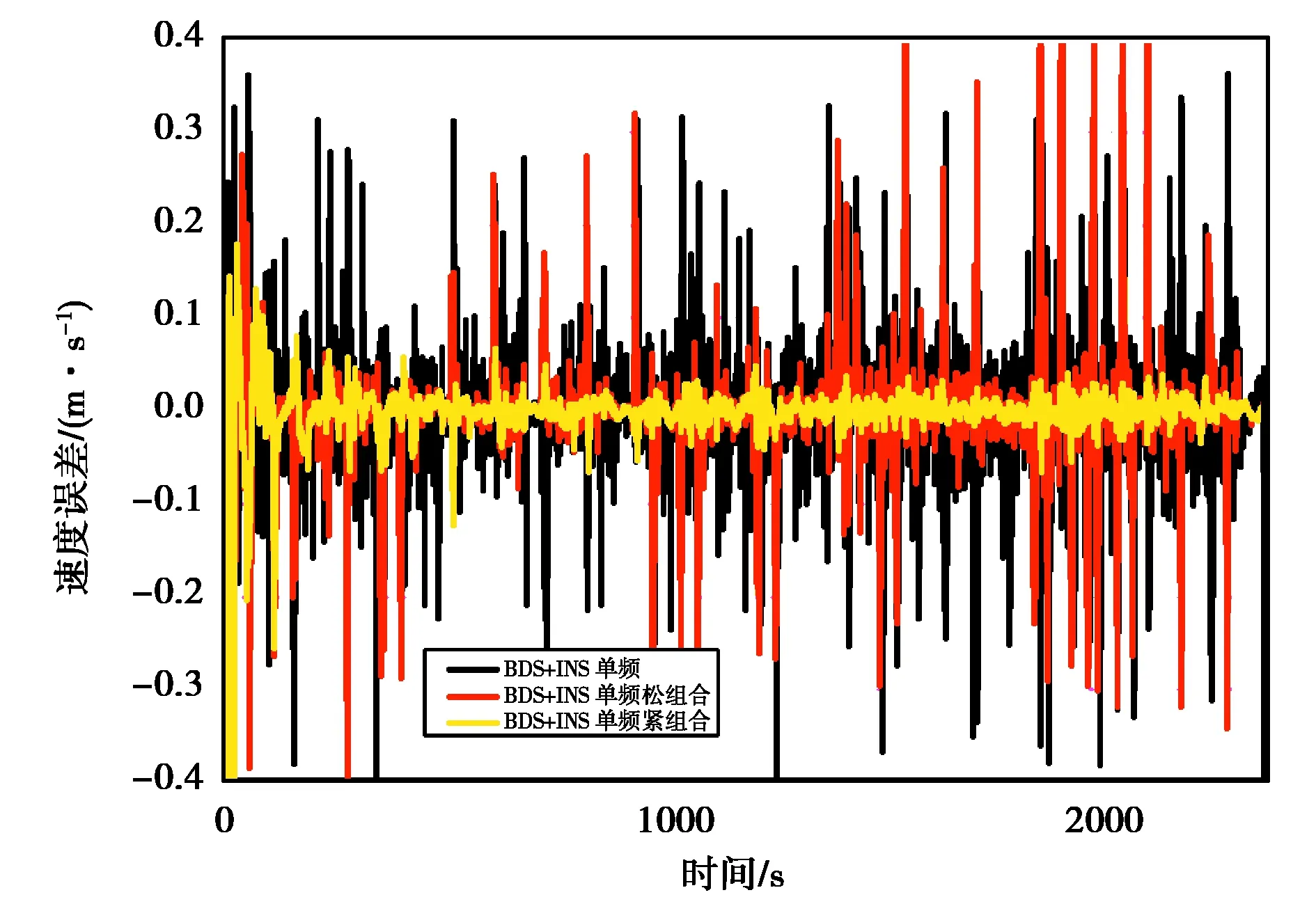
圖10 單頻BDS和INS融合測速E向誤差
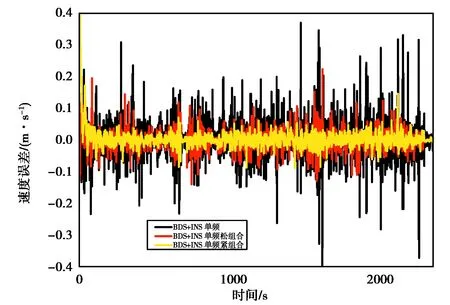
圖11 單頻BDS和INS融合測速D向誤差
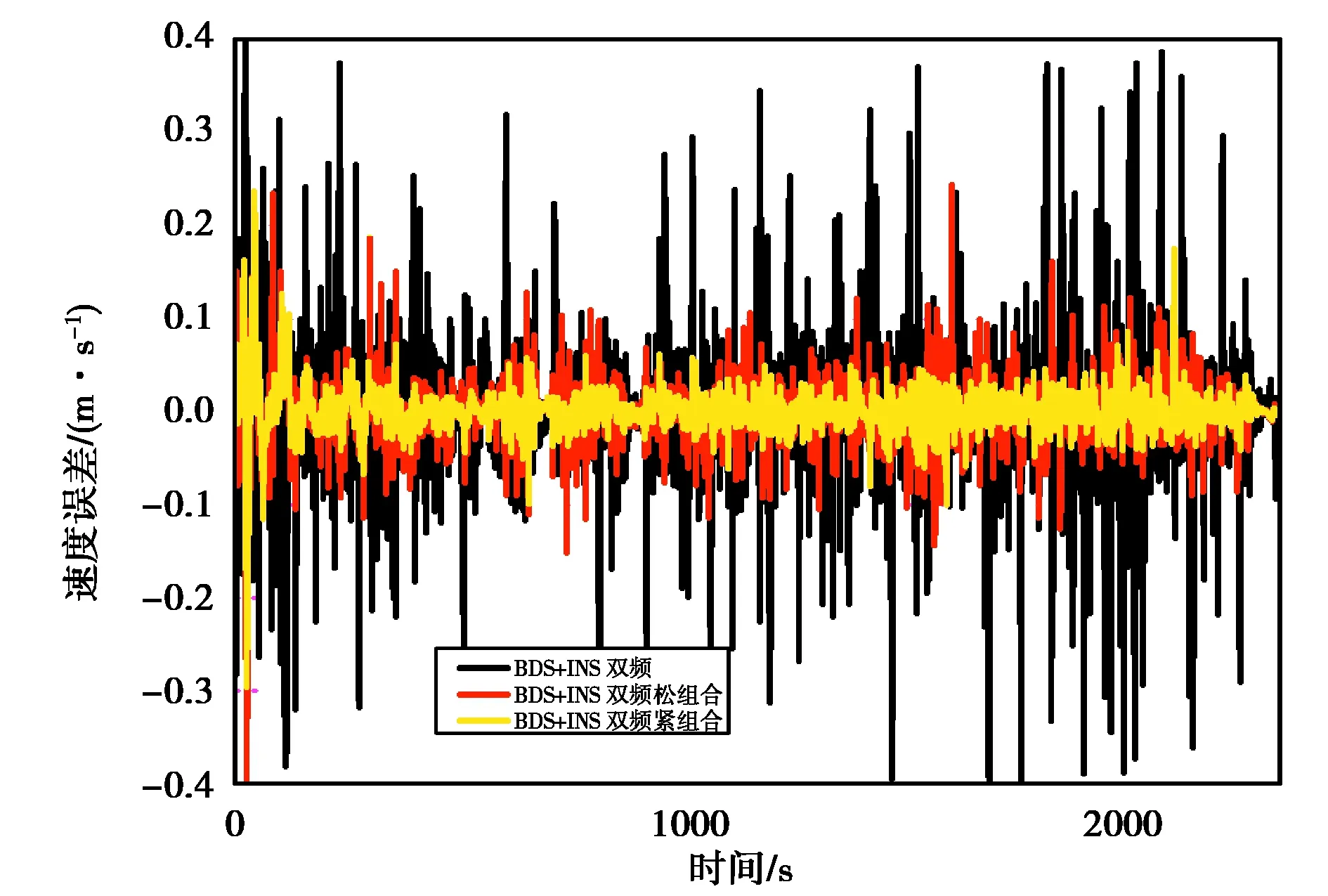
圖12 雙頻BDS和INS融合測速N向誤差
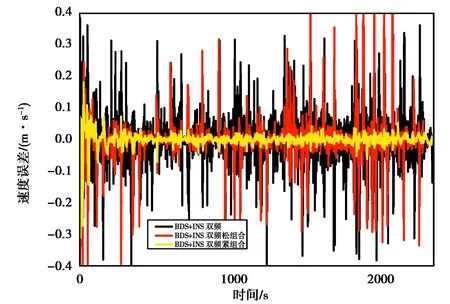
圖13 雙頻BDS和INS融合測速E向誤差
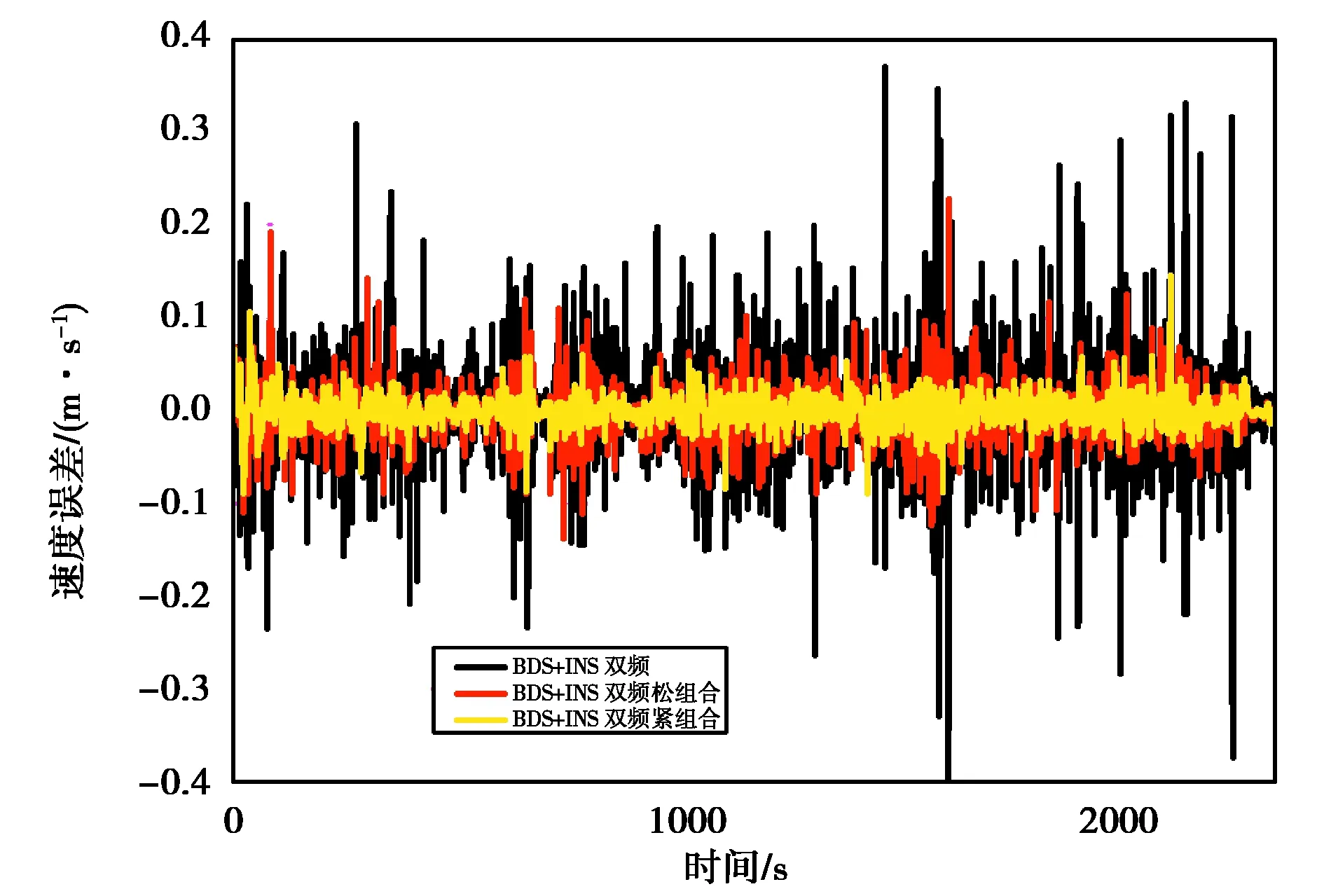
圖14 雙頻BDS和INS融合測速D向誤差
表3 不同組合方式測速精度
方案東向測速RMS/(m·s-1)北向測速RMS/(m·s-1)地向測速RMS/(m·s-1)BDS單頻0.0880.0910.063 BDS單頻松組合0.0730.0310.027 BDS單頻緊組合0.0180.0220.021 BDS雙頻0.0880.0910.063 BDS雙頻松組合0.0730.0320.026 BDS雙頻緊組合0.0120.0180.014
在上述實驗中,BDS RTK/INS緊組合模式表現出了最好的性能.為驗證在此種高性能條件下BDS使用頻率的影響,本試驗采用BDS單頻、雙頻數據,與INS數據進行緊導航解算,獲取相應組合方式的速度,再與參考值求差,并進行對比.通過對試驗結果進行分析,評價雙頻數據在低成本、緊組合組合導航中的實用性.圖15~17示出了BDS雙頻數據與INS進行緊組合后的速度誤差.從圖上可以看出,在BDS/INS緊組合中使用雙頻BDS數據有效改善了測速精度,N、E、D向RMS分別改善了18.2%、33.3%、33.3%.這說明在進行BDS RTK/INS緊組合導航解算時,雙頻數據的引入對BDS RTK/INS緊組合導航測速精度能帶來較大改善.隨著電子技術的不斷發展,雙頻芯片的成本也在不斷降低,這對實現高精度低成本的組合導航系統有一定幫助.
圖15 單雙頻BDS和INS緊組合測速北向誤差
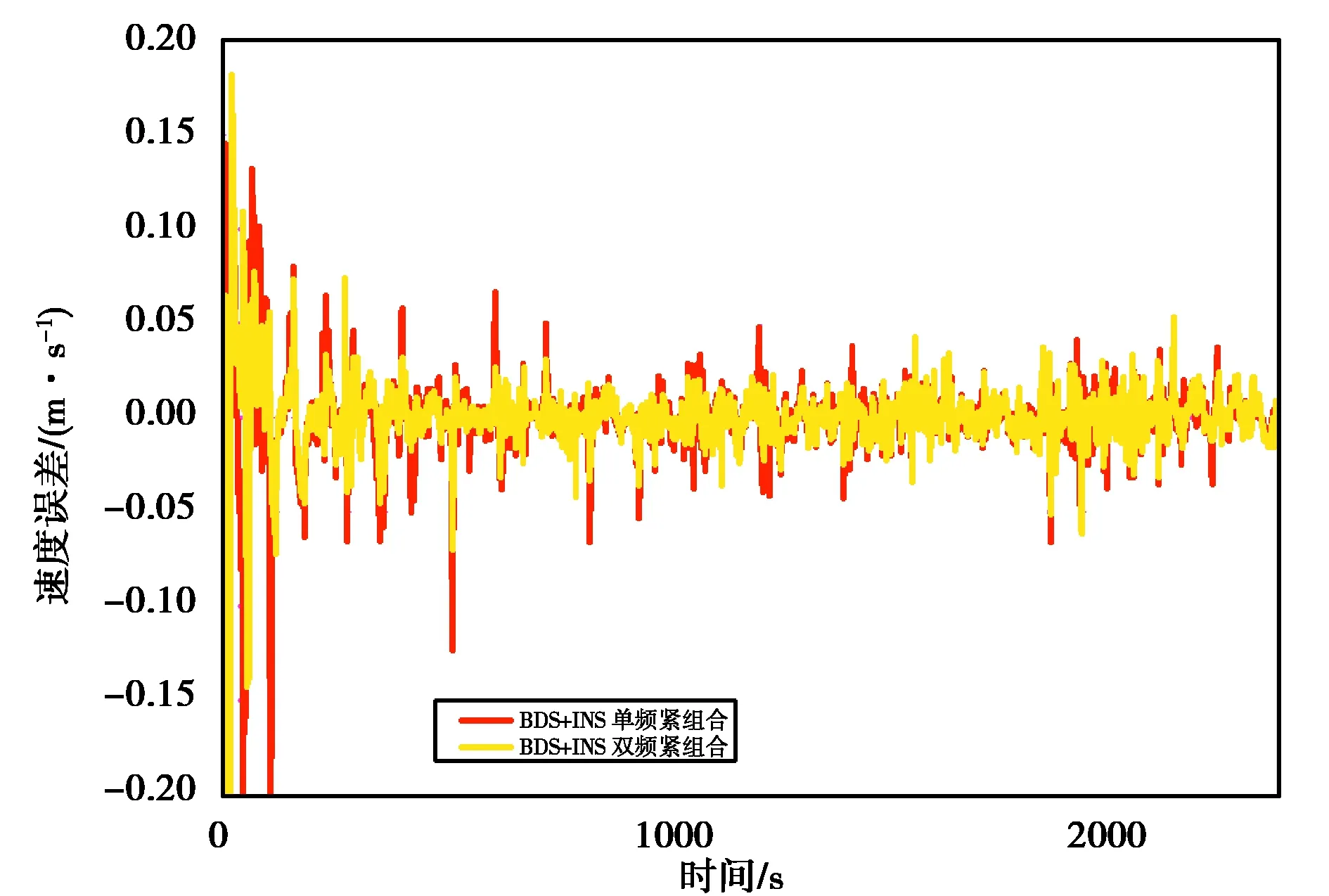
圖16 單雙頻BDS和INS緊組合測速東向誤差
圖17 單雙頻BDS和INS緊組合測速地向誤差
圖18示出了各測速方案的統計圖.從圖上可以看出,不論何種組合方式,低成本慣性器件的引入均能有效改善BDS的測速精度,而緊組合的改善程度較松組合更為明顯.當雙頻數據可用時,使用雙頻數據能有效改善緊組合中的測速精度.
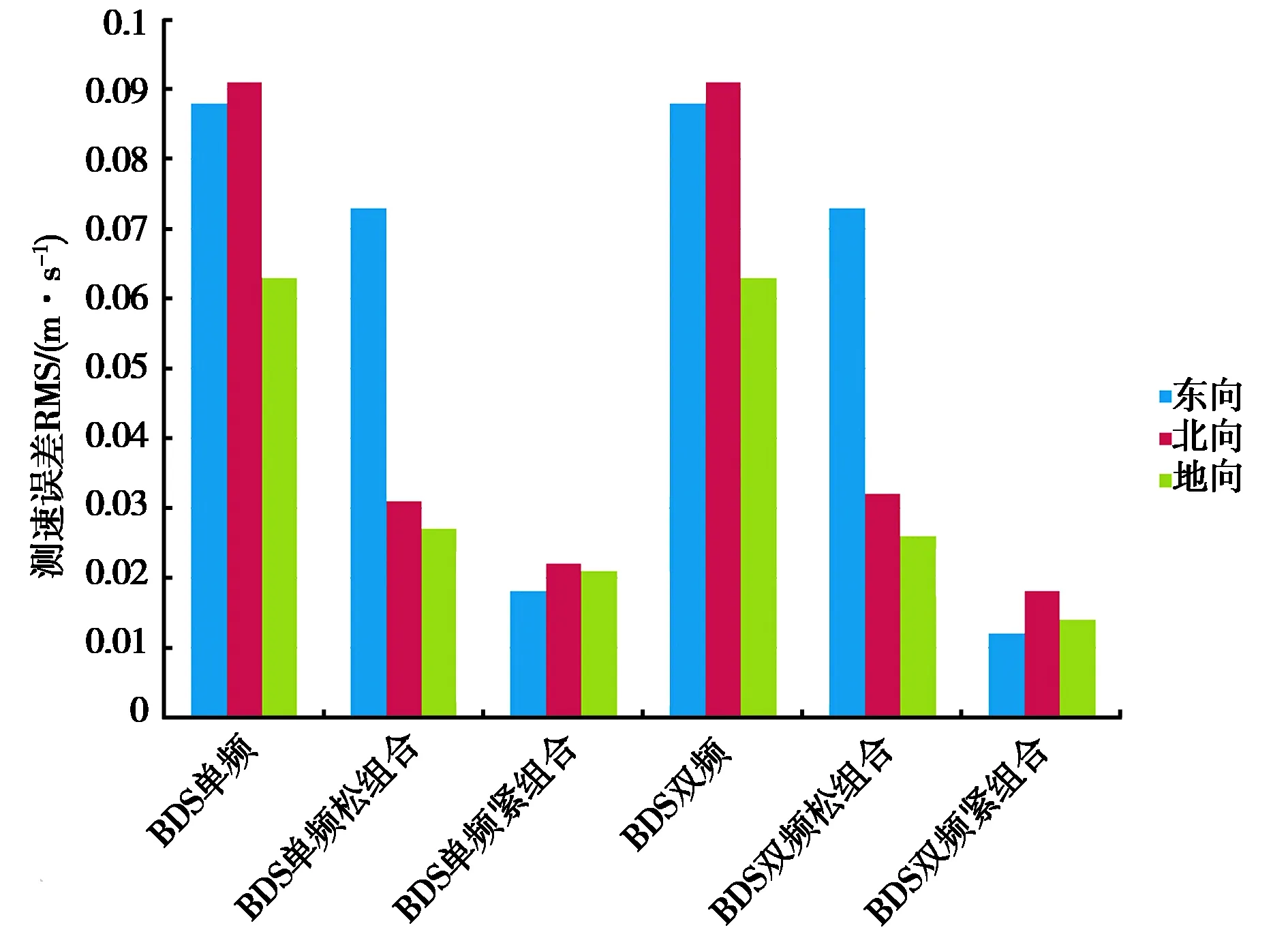
圖18 不同測速方案誤差統計
2.4 BDS RTK/INS定姿精度分析
本實驗分別采用單頻、雙頻BDS數據與INS數據組合解算,獲取相應組合方式的姿態,并與參考值進行比較.圖19~21分別示出了單、雙頻BDS緊組合的橫滾角(roll)、俯仰角(pitch)、航向角(heading)誤差.從圖上可以看出,使用雙頻BDS數據與進行INS緊組合解算能有效減少姿態收斂時間.表4示出了兩種組合方式的姿態誤差RMS,使用雙頻數據使橫滾角(roll)、俯仰角(pitch)、航向角(heading)誤差RMS分別改善了41.1%、26.7%、59.0%.
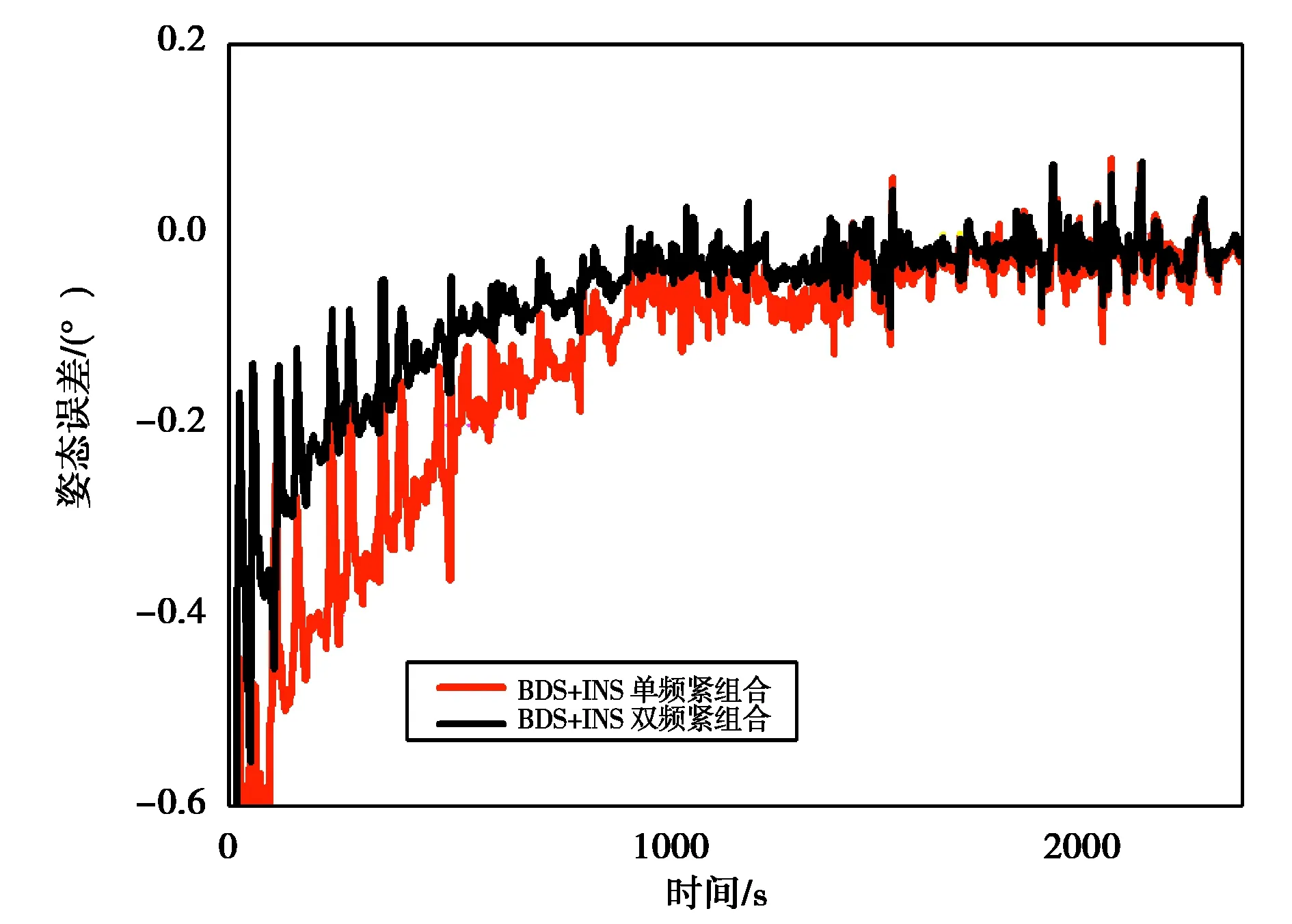
圖19 單雙頻BDS和INS緊組合橫滾角誤差
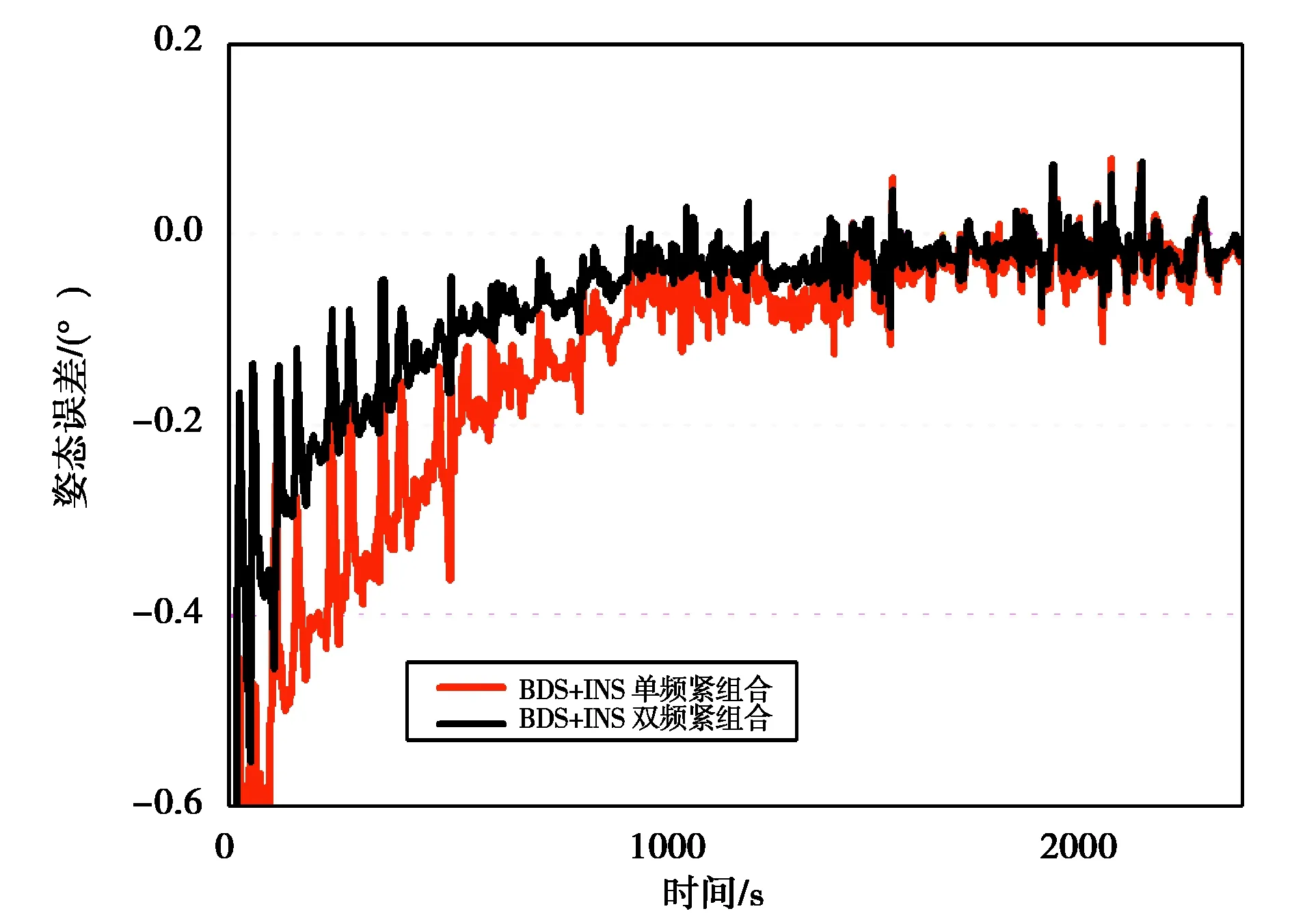
圖20 單雙頻BDS和INS緊組合俯仰角誤差
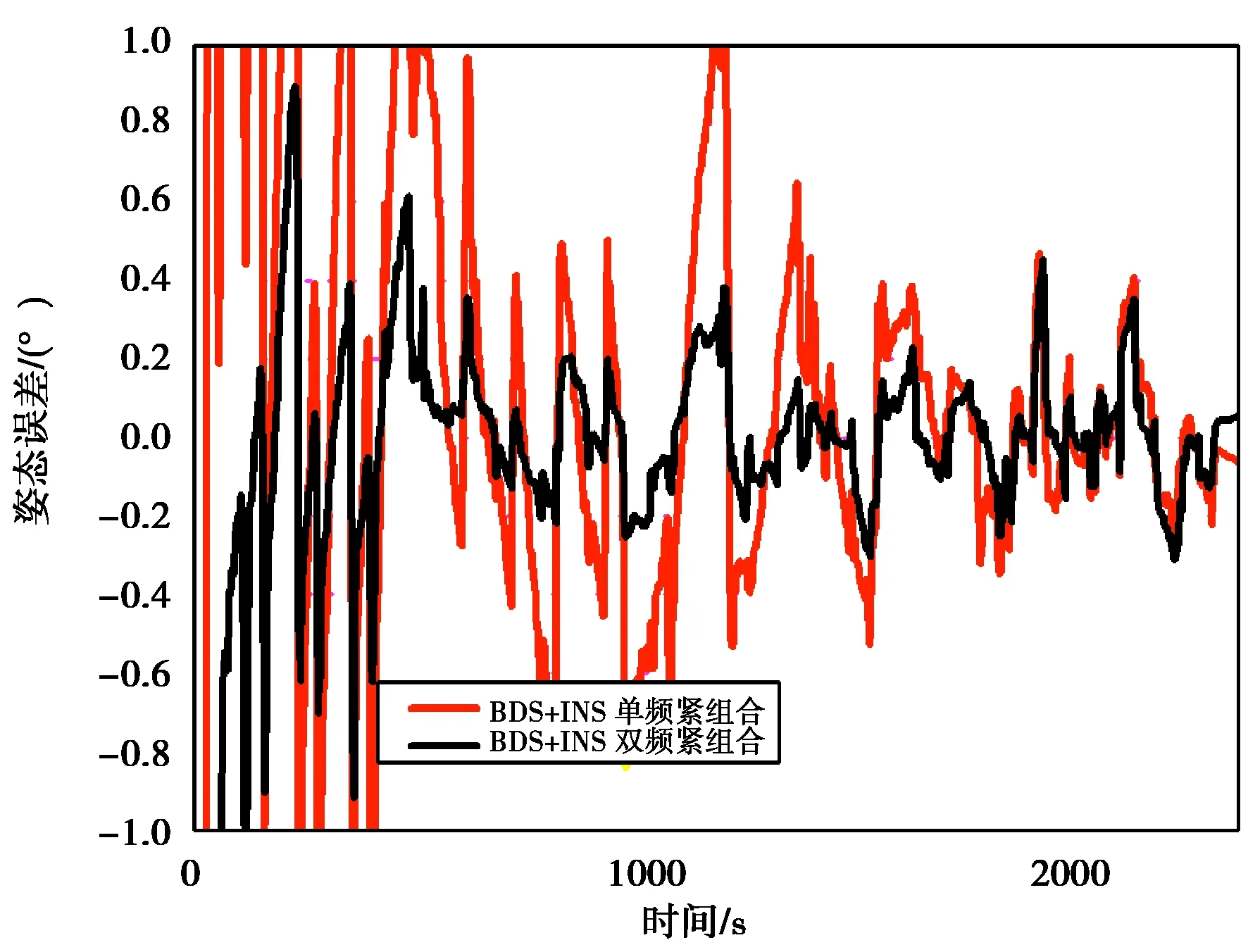
圖21 單雙頻BDS和INS緊組合航向角誤差
表4 緊組合姿態誤差
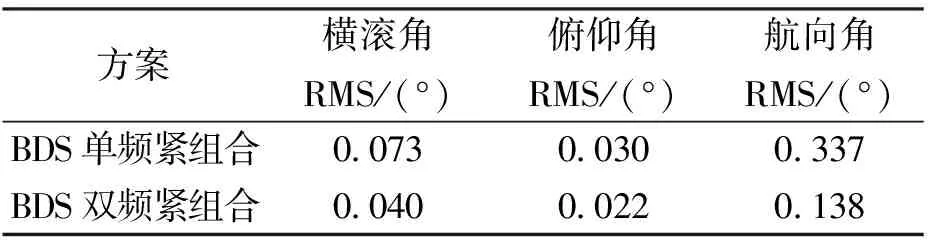
方案橫滾角RMS/(°)俯仰角RMS/(°)航向角RMS/(°) BDS單頻緊組合0.0730.0300.337 BDS雙頻緊組合0.0400.0220.138
此外,不論何種組合方式,航向角RMS明顯差于其他兩個方向,這可能是由于航向方向的可用性較差[9].
3 結束語
本文推導了BDS RTK/INS緊組合系統的狀態模型、量測模型,并基于車載實驗數據對BDS RTK/低成本INS緊組合導航系統性能進行驗證和分析.實驗結果表明,低成本IMU能在基本不影響組合導航系統定位精度的同時,較大改善系統測速精度.松組合模式下, N、E、D方向速度RMS分別改善了65.9%、5.7%、57.1%;而緊組合模式下速度RMS分別改善了79.5%、75.8%、66.7%.使用雙頻數據時,緊組合可以進一步改善系統測速精度,其N、E、D向速度RMS相對單頻BDS RTK/INS緊組合分別改善了18.2%、33.3%、33.3%.而在定姿時,使用雙頻數據可有效減小收斂時間,改善定姿精度,使橫滾角、俯仰角、航向角誤差RMS分別改善了41.1%、26.7%、59.0%.
致謝:感謝武漢大學章紅平教授團隊提供的試驗數據.
