自動化智能倉儲系統的設計與可行性分析?
2019-11-12 06:38:28孫永明夏水斌
計算機與數字工程 2019年10期
張 芹 孫永明 夏水斌 郭 鵬
(1.國網湖北省電力有限公司計量中心 武漢 430080)(2.深圳市國電科技通信有限公司 深圳 518031)(3.湖北華中電力科技開發有限責任公司 武漢 430077)
1 引言
目前自動化倉儲主要停留在自動化水平,由貨架、堆垛機、進出庫輸送機、自動控制系統和管理信息系統組成[1],可根據指令自動完成貨物的存取工作,并對倉儲貨物進行自動化管理,使物料移動和儲存更加合理[2]。但是當這種自動化倉儲在進行選擇工作時,需要人為在倉儲中進行貨物的識別,這大大降低了倉儲的運營效率[3]。
近年來,由于射頻識別(RFID)技術的普遍使用,它已成為目標定位領域的研究熱點[4~6]。RFID系統使用無線電傳輸將能量發送到標簽,該標簽又將唯一的識別碼發送回鏈接到信息管理系統的讀取器。如果將具有唯一代碼的RFID標簽嵌入到對象中,則可以大大簡化對象的識別。此外,RFID 具有許多優點,例如非接觸通信、長壽命、高數據速率、非視線可讀性和低成本[7]。由于上述原因,RFID技術經常被用于識別導航和操縱等。
本文研究了自動化立體智能倉儲中的多模式智能存儲與檢索系統。利用RFID技術對目標進行粗略定位,并利用計算機視覺對目標進行精確定位。不僅降低了機器人控制的復雜度,而且充分利用了圖像處理的結果。
2 自動化智能倉儲系統
2.1 倉儲系統
隨著現代物流技術的飛速發展,自動化智能倉儲作為現代物流系統的重要組成部分已被廣泛應用。自動化技術在倉儲中的應用經歷了四個階段:人工倉儲階段、機械倉儲階段、自動倉儲階段和智能倉儲階段。在第一階段,物資的運輸、儲存和管理由人來實現。在第二階段,物料可以通過輸送帶、車輛和升降機移動和攜帶。在第三階段,伺服機構可以由人在自動化倉儲中操縱。在最后階段,將人工智能技術應用到自動化智能倉儲中具有廣闊的前景[8],如圖1所示。
圖1 自動化智能倉儲示意圖
2.2 RFID定位系統
RFID 系統主要包括三個部分:閱讀器、天線和RFID 標簽[9]。由于RFID 標簽的獨特性,閱讀器可以在目標附著在RFID 標簽上后定位和跟蹤目標。由于被動標簽價格便宜、使用壽命長、重量輕、占用空間小的特點,其主要用于附著在目標物體上。閱讀器可以通過RS232 與主機進行通信。CCD 攝像機安裝在升降機的吊臂末端,可以利用物體的顏色和形狀來區分目標。受LANDMARC定位系統[10]的啟發,本文利用會議標簽用于自動化智能倉儲,分為5 行6 列的會議標簽分布在托盤的底部,如圖2所示。
每個會議標簽的實際位置記錄在其中。此外,數據庫中每個被考慮的目標物體也附著在一個RFID 標簽上,該標簽稱為目標標簽。當閱讀器檢測到會議標簽和目標標簽時,機器人可以知道其檢測區域中真實目標的名稱和數量,這可以減少數據庫中匹配項目的數量,也可以計算物體的粗略位置。
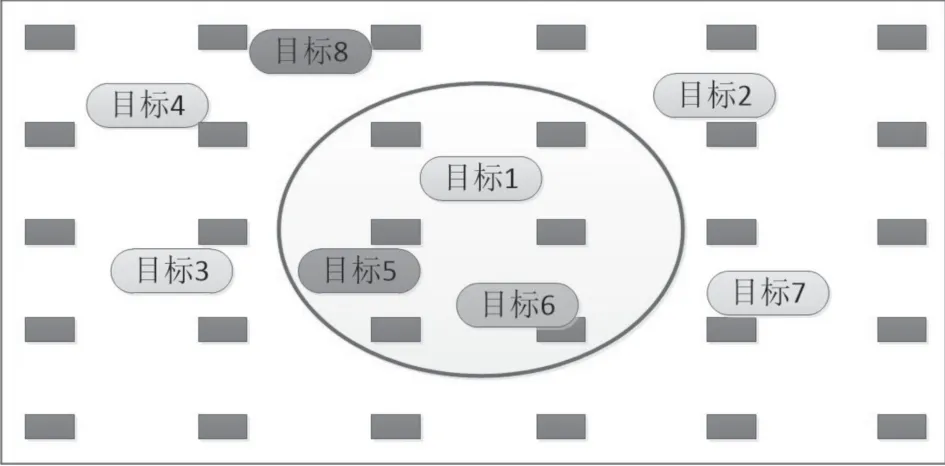
圖2 參考標簽的分布
在圖2 中,方框表示會議標簽,圓圈表示RFID天線的檢測范圍。其他顏色的形狀意味著不同的目標。從圖2 中可以得出結論,在RFID 的檢測范圍內,有6個會議標簽和3個目標,因此目標的粗略位置可以計算為

其中,N 是會議標記的數量。
2.3 計算機視覺系統
計算機視覺可以認為是用照相機代替人的眼睛,用計算機代替人的大腦,從而完成對環境和對象的識別和解釋。計算機視覺系統主要由三個部分組成:圖像獲取、圖像處理與分析、輸出或演示[11]。圖像信息中的海量數據是圖像處理的一大難點,需要對圖像信息進行高速處理,并且應該加入專用圖像處理器,而一般圖像處理可以直接發送到計算機中進行處理。計算機完成的工作主要有圖像底層處理、圖像特征提取、模式識別和理解等[12]。
計算機視覺是一門發展非常迅速的新興學科,自20 世紀80 年代以來,機器人視覺的研究經歷了從實驗室到實際應用的發展階段。從簡單的二值圖像處理到高分辨率、多灰度級的圖像處理[13],從一般的二維信息處理到三維視覺機制以及模型和算法的研究都取得了很大的進展[14]。隨著計算機工業的飛速發展,人工智能、并行處理和神經網絡等學科的發展,促進了機器人視覺系統在許多復雜視覺過程中的實際應用研究。目前,機器人視覺已廣泛應用于視覺檢測、機器人視覺引導和自動裝配領域。
機器人視覺系統首先利用CCD 攝象機對圖像進行提取并變換為數字信號,然后利用先進的計算機硬件和軟件技術對圖像數字信號進行處理,從而得到各種需要的圖像目標特征值,實現模式識別、坐標計算、灰度分布圖等多種功能。根據其結果完成顯示圖像、輸出數據、發出指令、完成與執行機構協調調整位置、數據統計等自動化過程。與人工視覺相比,機器視覺的優點是精確、快速、可靠和數字化[15]。
當確定目標的粗糙位置時,操縱器使用機載攝像機識別目標。本文采用顏色和形狀信息對目標進行識別,攝像機提供的視頻存儲在RGB 空間中。為了減少光線的影響,本文將RGB空間轉換為YCbCr空間,可以把光照和色調分開。由于參數易于計算且檢測率高,高斯模型用于顏色檢測。對于變換到YCbCr空間的圖像,計算與目標的相似度為

將相似性圖像轉換為二值圖像,并且白色區域是目標可能存在的感興趣區域。由于感興趣區域還包含與目標顏色相似的其他區域,因此利用形狀信息用于準確的目標提取。中值濾波是一種減少邊緣模糊的非線性平滑方法,其思想是將圖像中的當前點替換為其鄰域亮度的中值。鄰域亮度的中值不受單個噪聲尖峰的影響,因此中值平滑可以很好地消除脈沖噪聲。此外,由于中值濾波不會使邊緣模糊,所以它可以迭代使用。在每個像素位置處對矩形窗口內的像素進行排序,當窗口在一行中移動一列時,對其內容的唯一更改是丟失最左邊的列并用新的右列替換它。中值平滑是更一般的秩濾波技術的特例,其思想是將某些鄰域中的像素排序成序列。中值濾波還可以保留圖像的邊緣效果,便于邊緣提取且易于實現。
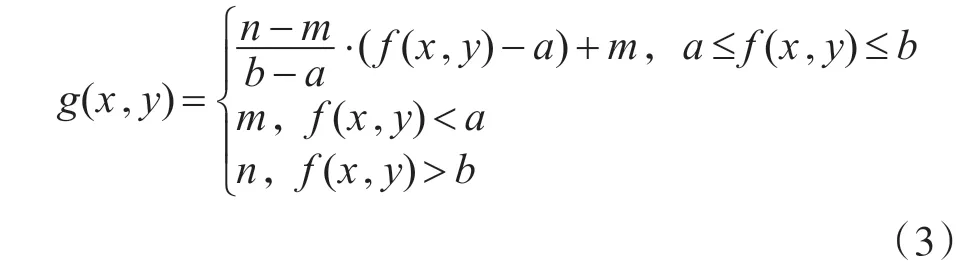
本文采用線性替換的方法增強圖像的對比度,通過灰度范圍的線性替換來增加背景與貨物的對比度,達到增強邊緣特征的效果,有利于邊緣檢測。假設輸入圖像f(x,y)的灰度范圍為[a,b],輸出圖像g(x,y)的灰度范圍為[m,n],則對比度的梯度增強可以表示為
無論是人工視覺還是機器視覺,圖像的邊緣信息都是最重要的,圖像的邊緣具有勾勒區域形狀、定義部分屬性和傳遞大部分圖像信息的優點,因此,邊緣檢測可以看作是處理許多圖像的關鍵。邊緣通常用于圖像分析以尋找區域邊界,假設區域具有均勻的亮度,則其邊界位于圖像函數變化的像素處,因此在沒有噪聲的理想情況下,邊界由具有高邊緣幅度的像素組成。可以看出,邊界及其邊緣垂直于梯度的方向。
3 系統的機器人控制技術
3.1 系統框架
本文所設計的自動化智能倉儲有四排自動貨架,包括120 個貨艙,分成兩個隧道,一個自動堆垛機,兩個儲存和檢索平臺,一個六自由度的SK6 機械,如圖3所示。
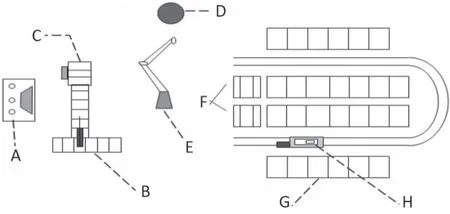
圖3 自動化倉庫的組成
其中,A 為操作平臺;B 為輸送機;C 為稱重平臺;D 為旋轉平臺;E 為機械手;G 為貨架;H 為堆垛機;G為裝庫和出庫平臺
3.2 機器人控制系統
倉儲使用Yaskawa 生產的SK6。SK6 的控制器是YASNAC MRC II,它采用交互式編程語言INFORM II,有兩種編程方式:演示和遠程控制。本文將這兩種方法結合起來以簡化系統設計。以物流自動化智能倉儲的裝庫作業為例,如圖4所示。

圖4 機器人控制系統的組成
首先,本文把待進庫的貨物放在均勻的鏈式輸送機上,在貨物運輸過程中,條形碼識別器讀取貨物上粘貼的條形碼,并將其信息傳輸到受控計算機,然后在稱重機上稱重。同時,啟動機器人,機器人手臂向稱重機上方轉動,攝像機通過安裝在主控計算機上的圖像采集卡將圖像采集到計算機內,并計算中心點到變換機器人的工作坐標點的距離。安裝在機器人手上的吸盤抓取貨物并把它們放入貨架。然后堆垛機啟動,將貨物分配給儲存空間。反之,出庫的工作過程相反。
3.3 倉儲控制系統
自動化智能倉儲控制系統包括管理與監控計算機、主PLC和下位PLC,它們通過Modibus和無線網絡連接,可以構成一個完整的多級計算機監控系統。整個自動化智能倉儲系統集貨物存儲、檢索、分配和運輸于一體,實現了整個系統無需人工操作的智能化倉儲。在機器人控制過程中,采用演示編程與遠程通信相結合的方法,將貨物的中心點數據和遠程控制指令從主控機傳送給機器人控制器,如圖5所示,實現了機器人的靈活控制和貨物運輸。
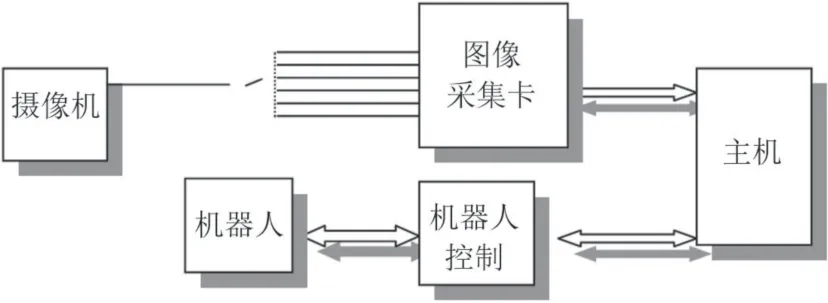
圖5 自動化智能倉儲控制系統
為了實現信息的互操作性和上下文互聯,還需建立信息表示和獲取模型,為機器人提供不同級別的信息指令。在傳統模式中,機器人與傳感設備之間的關系是一對一的對應模式,機器人與計算環境預先是固定且極為有限。而在智能空間中,計算資源和各種設備往往是公開和共享。智能空間中的信息服務不僅能夠提供原始信號,還能夠提供基于多傳感器數據融合的多級信息。本文提出了一種基于分布式數據融合樹的信息采集系統,為用戶提供多層次的信息,實驗表明基于多模式信息采集的機器人控制系統能夠提高定位精度和訪問效率。
4 實驗分析
以自動檢索操作為例。將目標放置在旋轉平臺上,機械手首先利用RFID對目標進行定位,然后利用車載視覺對目標進行識別和跟蹤,最后抓住目標并放置在稱重平臺上。從許多實驗中,我們可以得出這樣的結論:
1)機械手可以精確地跟蹤計劃路徑。
2)主機可以讀取數據文件,正確生成命令序列,并將數據保存到變量中,控制機器人抓取目標。
3)本文靈活運用了演示和遠程模式,不僅可以簡化編程,而且可以提高自動存儲和檢索系統的靈活性。
圖6 給出了不同方法的效率。可以看出,該方法采用RFID 和視覺提供的多模式信息,可以提高50%的效率。
5 結語
自動化智能倉儲是現代物流的重要組成部分,如何提高商品識別和揀選效率是現代物流技術中的關鍵問題。本文將機器人技術應用到自動化智能倉儲中,提出了一種基于RFID 和視覺技術的目標識別、定位和存儲、檢索方案,以提高自動存儲和檢索系統的效率。實驗證明了該系統的可行性。
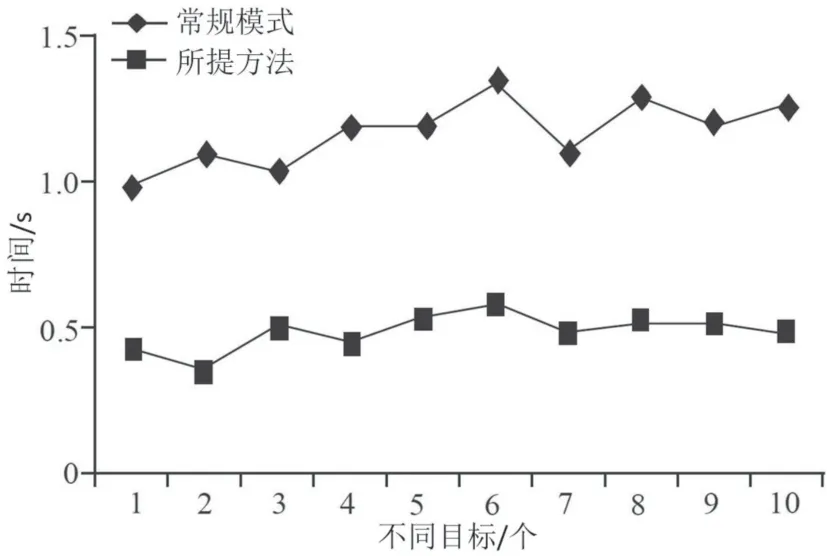
圖6 檢索系統效率
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
科技傳播(2019年22期)2020-01-14 03:06:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
消費導刊(2017年20期)2018-01-03 06:26:40
中華手工(2017年2期)2017-06-06 23:00:31
衡陽師范學院學報(2015年3期)2015-02-10 06:02:23
中外會展(2014年4期)2014-11-27 07:46:46
