Harris 算法和Susan 算法的實(shí)現(xiàn)及分析?
2019-11-12 06:38:08崔樂(lè)李春李英
計(jì)算機(jī)與數(shù)字工程 2019年10期
關(guān)鍵詞:檢測(cè)
崔 樂(lè) 李 春 李 英
(1.商洛學(xué)院電子信息與電氣工程學(xué)院 商洛 726000)(2.陜西省尾礦資源綜合利用重點(diǎn)實(shí)驗(yàn)室(商洛學(xué)院) 商洛 726000)
1 引言
特征提取是圖像配準(zhǔn)和圖像分析的基礎(chǔ),是物體運(yùn)動(dòng)跟蹤的關(guān)鍵步驟之一[1]。采用場(chǎng)景的幾何和物理屬性來(lái)產(chǎn)生圖像中局部灰度級(jí)的顯著變化,從而產(chǎn)生圖像特征。圖像特征的獲取是成功進(jìn)行相機(jī)立體視覺(jué)和校準(zhǔn)研究的基礎(chǔ)和前提[2]。圖像的邊緣點(diǎn)、紋理、角點(diǎn)、拐點(diǎn)等是圖像特征的主要特點(diǎn),標(biāo)定精度和匹配精度受特征提取質(zhì)量的直接影響。因此,提取角落信息在研究和處理圖像中的重要信息中起著重要作用。
基于圖像特征在圖像處理中的重要性,國(guó)內(nèi)外眾多學(xué)者借助計(jì)算機(jī)視覺(jué)針對(duì)不同的實(shí)體物件開(kāi)展了大量的研究工作。Ma Qin[3]等基于圖像HSV顏色空間,獲得了多玉米穗三維育種特征的快速測(cè)量方法,果穗的測(cè)量精度可達(dá)94%,從而大大提高了玉米品種的評(píng)價(jià)效率。梁文東[4]等利用Matlab,成功提取了指紋圖像的特征點(diǎn),并實(shí)現(xiàn)偽特征點(diǎn)的剔除,其算法簡(jiǎn)單、速度快且運(yùn)算量小。王國(guó)林[5]等通過(guò)提取輪胎接地的投影面積、接觸面積、印痕寬度和印痕長(zhǎng)度等幾何信息,實(shí)現(xiàn)了印痕幾何參數(shù)的快速測(cè)量。然而,目前在計(jì)算機(jī)視覺(jué)和圖像處理領(lǐng)域中沒(méi)有適當(dāng)?shù)慕屈c(diǎn)數(shù)學(xué)定義,但是有很多方法可以描述角點(diǎn)檢測(cè)[6~10]。為了防止或減少錯(cuò)誤特征的出現(xiàn),許多方法都要求有大量的訓(xùn)練集和數(shù)據(jù)冗余來(lái)避免這種錯(cuò)誤[11~12]。基于此,本文主要利用Matlab 提供的平臺(tái)進(jìn)行Harris 算法和Susan 算法的圖像處理,并結(jié)合Matlab語(yǔ)言編寫的程序?qū)崿F(xiàn)兩個(gè)算法的比較和分析。
2 Harris 角點(diǎn)檢測(cè)和Susan 檢測(cè)算法簡(jiǎn)介
2.1 Harris角點(diǎn)檢測(cè)原理
對(duì)于一副照片,Harris 角點(diǎn)檢測(cè)的原理是:通過(guò)局部圖像的灰度變化程度反映給自相關(guān)函數(shù),進(jìn)而實(shí)現(xiàn)對(duì)角點(diǎn)的檢測(cè)。Harris 算子是一個(gè)簡(jiǎn)單的點(diǎn)特征提取算子,它源于信號(hào)處理中的自相關(guān)函數(shù),自相關(guān)函數(shù)的階梯曲率是M矩陣的特征值[13]。
1988 年,C. Harris 和J. Stephens 提出一種基于信號(hào)的點(diǎn)特征提取算法,即Harris 算子,也稱為Plessey 角點(diǎn)檢測(cè)算法[14]。根據(jù)自相關(guān)函數(shù)的尖頂圖像進(jìn)行判斷是該算法的核心,此尖頂處的點(diǎn)是角點(diǎn)。也就是說(shuō),通過(guò)建立對(duì)稱矩陣M(與照片X 方向一階導(dǎo)數(shù)和Y 方向一階導(dǎo)數(shù)自相關(guān)函數(shù)相聯(lián)系的矩陣),求得M的兩個(gè)特征值,而自相關(guān)函數(shù)的一階曲率是M 陣的特征值。若自相關(guān)函數(shù)圖像在這一點(diǎn)呈尖頂形,則說(shuō)明兩個(gè)曲率值都很高。對(duì)于圖像I(x,y),在點(diǎn)(x,y)處平移(Dx,Dy)之后的自相似性可以通過(guò)自相關(guān)函數(shù)給出:

其中,W(x,y)是以點(diǎn)(x,y)為中心的窗口,w(x,y)為加權(quán)函數(shù),可以用常數(shù)或者高斯加權(quán)函數(shù)表示。
根據(jù)Taylor 展開(kāi),在平移(Dx,Dy) 后對(duì)圖像I(x,y)執(zhí)行一階近似:
在式(2)中,Ix、Iy是圖像I(x,y)的偏導(dǎo)數(shù)。這樣,式(1)就能近似表示為

其中:
在圖像I(x,y)在點(diǎn)(x,y)處平移(Dx,Dy)后,其自相關(guān)函數(shù)可近似為

根據(jù)二次函數(shù)的特征值計(jì)算方法,可以得到等式(4)的特征值。Harris 算法中給出的角點(diǎn)辨別方法不需要計(jì)算特定的特征值,而是計(jì)算角點(diǎn)響應(yīng)值R以確定角點(diǎn)。R的計(jì)算公式為


Harris角點(diǎn)檢測(cè)實(shí)現(xiàn)步驟如下:
1)求出I(x,y)在x、y方向上的的梯度Ix、Iy;
2)分別求出在x、y 方向上的梯度乘積,I2x=Ix?Ix,I2y=Iy?Iy,Ixy=Ix?Iy;
3)對(duì)I2x、I2y和Ixy執(zhí)行高斯加權(quán),從而產(chǎn)生三個(gè)元素A、B和C,如下所示:

4)獲得每個(gè)像素的Harris 響應(yīng)值R,使得小于閾值的響應(yīng)值R為零;

5)進(jìn)行3 3鄰域非極大值抑制,并且圖像中的角點(diǎn)由局部極大值點(diǎn)表示;
6)記錄圖像角點(diǎn)的位置。
2.2 Susan角點(diǎn)檢測(cè)原理
由于Susan 算法無(wú)需計(jì)算梯度,因此非常適用于噪聲圖像或者低對(duì)比度的灰度圖像的邊緣檢測(cè)。它具有噪聲能力強(qiáng)、定位準(zhǔn)確等特點(diǎn),可直接與圖像灰度的相似性進(jìn)行比較。此算法不但運(yùn)算量少,也能夠達(dá)到細(xì)化邊緣的目的[15]。
1)算法描述
對(duì)于圖像中的所有像素,利用設(shè)置的圓形模板掃描整個(gè)圖像,并將模板內(nèi)的每個(gè)像素與中心像素的灰度值進(jìn)行比較,通過(guò)與設(shè)定的閾值進(jìn)行比較,判斷像素是否在Susan 區(qū)域內(nèi),并且定義的區(qū)域由式(8)表示:

式中:c(r,r0)為模板中屬于Susan 區(qū)域的像素判別函數(shù),I(r0)為中心像素的灰度值,I(r)是模板內(nèi)任何像素的灰度值,t為灰度差門限。那么,圖像中某一點(diǎn)Susan區(qū)域的大小可以表示為
式中c(r0)是以r0為圓心的圓形模板部分。獲得每一個(gè)像素的Susan 的n(r0)以后,將其與先前設(shè)置的閾值進(jìn)行比較,當(dāng)n(r0)<g 時(shí),檢測(cè)到的像素位置r0可以被區(qū)分為邊緣點(diǎn)。
2)模板的選擇
實(shí)際上,不能實(shí)現(xiàn)常規(guī)的循環(huán)模板。然而模板較小的時(shí)候,如果出現(xiàn)邊緣點(diǎn)漏檢的現(xiàn)象,則是由于門限值選取的不恰當(dāng)。所以為了不增加運(yùn)算量,模板也就不適合取的過(guò)大,通常可以取5*5 或象素為37 的模板[16]。本文圖像處理時(shí)都是采用的5*5的模板。
3)門限t,g的確定
門限g 確定邊緣點(diǎn)Susan 區(qū)域最大值,假設(shè)照片中像素的Susan 值小于g,那么該點(diǎn)被視為邊緣點(diǎn)。當(dāng)g 太小時(shí),將丟失部分邊緣點(diǎn);當(dāng)g 太大時(shí),可以選擇邊緣點(diǎn)附近的像素作為邊緣。選取出初始的邊緣點(diǎn)要有一定的質(zhì)量,進(jìn)一步刪除其中冗余象素,則就有可能實(shí)現(xiàn)單象素的精度。
可以檢測(cè)的邊緣點(diǎn)的最小對(duì)比度由閾值t 表示,閾值t也是可以忽略的最大噪聲容限。要從對(duì)比度較低的照片中提取特征,需要使用較小的t值。因此,采用不同的t值,可以獲得不同噪聲條件和對(duì)比度的圖像。
3 基于Harris角點(diǎn)算法的實(shí)現(xiàn)
圖1 所示為cnt分別為534 和2000 時(shí),Harris 算法近距離采集照片的圖像。從圖中分析可得:對(duì)近距離采集的圖像進(jìn)行Harris 算法處理可較精準(zhǔn)地標(biāo)定出目標(biāo)圖像的輪廓,且計(jì)算速度快。有助于進(jìn)一步對(duì)目標(biāo)圖形做更精確的處理,可無(wú)需對(duì)剩余部分圖像再做相同處理。
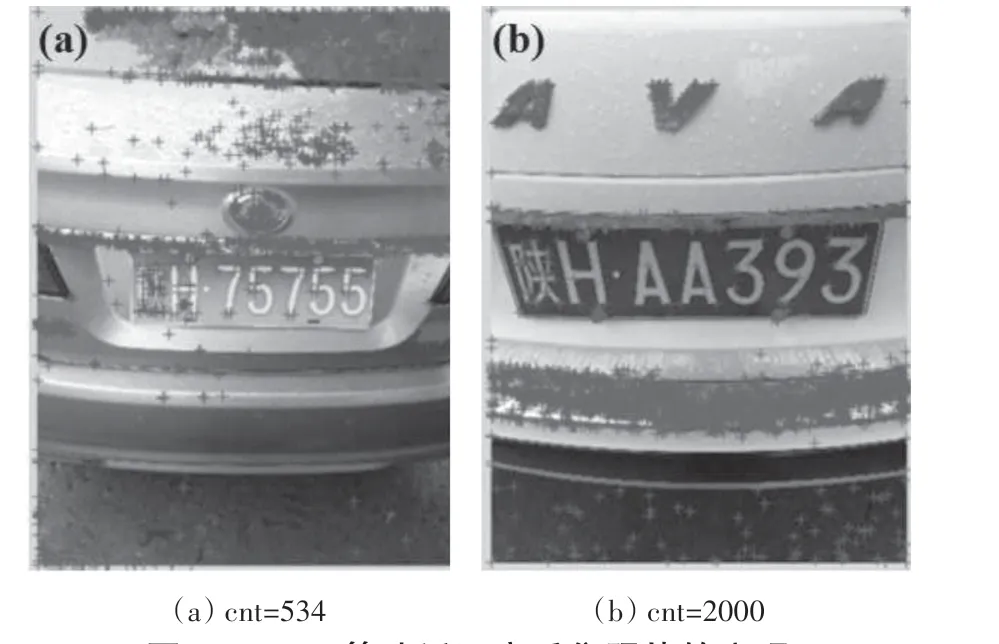
圖1 Harris算法近距離采集照片的實(shí)現(xiàn)
圖2 所示為Harris算法遠(yuǎn)距離采集照片時(shí)的圖像。從圖中可以看出:對(duì)較遠(yuǎn)距離采集的圖像做相同的Harris 算法處理,效果遠(yuǎn)差于近距離圖像的,目標(biāo)圖像太遠(yuǎn),故而所得圖像包含太多除目標(biāo)圖像以外的部分,雖然角點(diǎn)信息量大,但對(duì)目標(biāo)圖像干擾大,究其原因在于Harris 算法的抗干擾能力弱,從而造成誤差很大,同時(shí),所檢測(cè)目標(biāo)物體的運(yùn)動(dòng)狀態(tài)以及光線的明暗程度對(duì)其也有較大的影響。

圖2 Harris算法遠(yuǎn)距離采集照片的實(shí)現(xiàn)
為了進(jìn)一步分析Harris 角點(diǎn)檢測(cè)過(guò)程中影響因素,圖3顯示了Harris角點(diǎn)檢測(cè)cnt與距離和光線之間的關(guān)系。由圖3(a)可以看出:隨著距離的增大,cnt值也逐漸增大,進(jìn)而導(dǎo)致使得對(duì)目標(biāo)圖像的干擾愈來(lái)愈大,在檢測(cè)過(guò)程中容易出現(xiàn)多連續(xù)的點(diǎn),并存在嚴(yán)重的檢漏現(xiàn)象。所以在實(shí)際應(yīng)用中應(yīng)注意,例如對(duì)行駛車輛攝像時(shí)應(yīng)該調(diào)節(jié)攝像頭的焦距,便于抓住關(guān)鍵圖像的主要信息成分。圖3(b)所示為cnt 值與光線的關(guān)系,隨著光線增強(qiáng),其cnt值增大,同時(shí)目標(biāo)物體的運(yùn)動(dòng)狀態(tài)對(duì)cnt 值有較大的影響,對(duì)于靜止的車輛,其cnt值隨光線增強(qiáng)的增大速率較大,而靜止車輛較小。圖像的灰度變化會(huì)明顯改變cnt的值,結(jié)合圖1 和圖2 可知,cnt值的變化嚴(yán)重影響圖像的輪廓標(biāo)定,進(jìn)而影響著所采集圖像的清晰程度。
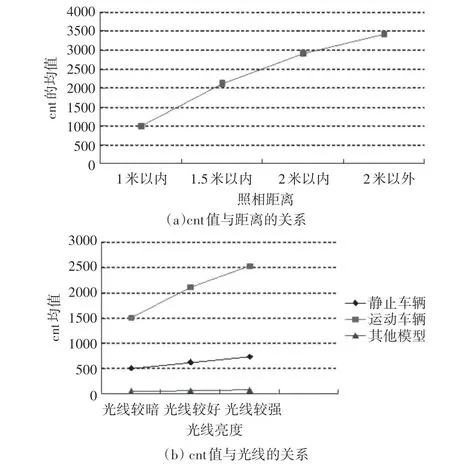
圖3 Harris角點(diǎn)檢測(cè)cnt與距離、光線的關(guān)系
綜合以上分析檢測(cè)結(jié)果,可以看出,Harris 算法的優(yōu)點(diǎn)在于:可直接對(duì)原圖像中的特征點(diǎn)進(jìn)行檢測(cè),對(duì)興趣點(diǎn)的檢測(cè)不受圖像的灰度變化、干擾噪聲和旋轉(zhuǎn)等因素的影響。然而其缺點(diǎn)也甚為明顯,精確定位不夠好,在有需要的情況下不能滿足精確定位的要求。
4 基于Susan角點(diǎn)檢測(cè)的實(shí)現(xiàn)
Susan算法用于檢測(cè)道路區(qū)域中車輛的角點(diǎn)信息,然后獲得原始圖像中的特征點(diǎn)的二維坐標(biāo),最后確定相關(guān)信息。圖4 所示為近距離光線良好情況下Susan 角點(diǎn)檢測(cè)的實(shí)現(xiàn)。圖4(a)顯示出了車輛牌照號(hào)碼的灰度處理之后的圖片。車牌等物品自身污損較嚴(yán)重、拍攝的距離和角度、拍攝時(shí)光線的調(diào)節(jié)以及車輛的運(yùn)動(dòng)狀態(tài)均會(huì)對(duì)圖像的灰度處理造成一定的影響。目標(biāo)物體清晰度越高,圖像灰度處理后目標(biāo)圖像的輪廓越清楚,圖4(a)是在較為理想的條件下得到的灰度處理圖,故此,圖像的灰度處理圖較為清晰。圖4(b)顯示出了由Susan 算法處理的圖4(a)的角點(diǎn)檢測(cè)圖,我們可以從處理后的圖像清楚的看到輪廓,但所檢測(cè)到的點(diǎn)有部分不連續(xù),因此,可從更細(xì)微點(diǎn)對(duì)圖像做進(jìn)一步處理,得到更精準(zhǔn)的圖像。
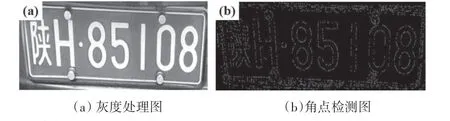
圖4 近距離光線良好情況下Susan角點(diǎn)檢測(cè)的實(shí)現(xiàn)
為了進(jìn)一步分析在遠(yuǎn)距離情況下,采用Susan算法能否實(shí)現(xiàn)圖像的清晰檢測(cè),圖5 給出了較遠(yuǎn)距離光線較暗情況下Susan 角點(diǎn)算法的實(shí)現(xiàn)。圖5(a)顯示了牌照狀態(tài)和拍攝角度等的灰度處理圖,類似于圖4(a)。從圖中可以看出,灰度處理后的圖像清晰度類似于圖4(a)的圖像清晰度,這表明在灰度處理期間圖像對(duì)其距離的影響很小。然而在采用Susan檢測(cè),在遠(yuǎn)距離檢測(cè)過(guò)程中,有大量不連續(xù)的點(diǎn)出現(xiàn),判斷出圖像的輪廓比較模糊,這樣可能會(huì)漏掉圖像中的重要信息,最終致使檢測(cè)信息發(fā)生錯(cuò)誤。

圖5 較遠(yuǎn)距離光線較暗情況下Susan角點(diǎn)算法的實(shí)現(xiàn)圖
圖6 所示為Susan 角點(diǎn)檢測(cè)圖像清晰度與距離、光線強(qiáng)弱的關(guān)系,從圖6 中可以看出:距離與光線可直接影響圖像的清晰度,從而進(jìn)一步影響Susan 算法處理的結(jié)果,也可以從圖中判斷出1m~1.5m 范圍內(nèi)采集的圖像,經(jīng)處理后,得到了更為清晰的圖像輪廓,圖像的形狀更直觀。
圖6 清晰度與距離、光線強(qiáng)弱的關(guān)系圖
綜合以上分析檢測(cè)結(jié)果可以看出,Susan 算法的優(yōu)點(diǎn)在于:不需要去噪處理,不需要依賴于前期分割結(jié)果,而是直接利用圖像灰度信息的檢測(cè)算法。其缺點(diǎn)在于:自行設(shè)置的閾值會(huì)直接影響檢測(cè)準(zhǔn)確性,穩(wěn)定性不夠好。
5 結(jié)語(yǔ)
1)Harris 算法僅采用差分求導(dǎo)方式,易于計(jì)算,角點(diǎn)提取的可靠性比較高,穩(wěn)定性和魯班性較高,但抗噪能力較弱,很難實(shí)現(xiàn)準(zhǔn)確的定位。
2)Susan 算法可以檢測(cè)到任意類型的角,抗干擾能力也比較強(qiáng),但其穩(wěn)定性不好,圖像檢測(cè)的準(zhǔn)確性取決于閾值的選取。
3)基于圖像的灰度自相關(guān)函數(shù)的Harris 角點(diǎn)檢測(cè)算法,能夠直接從原始照片中檢測(cè)到特征點(diǎn),并且能夠在照片自身發(fā)生灰度變化、旋轉(zhuǎn)、和干擾噪聲等情況下檢測(cè)圖像中的所有點(diǎn)。它達(dá)到了效率和精度兩方面的要求,且抗噪能力有了很大提高,誤檢測(cè)率也降低。
4)直接利用圖像灰度信息的Susan角點(diǎn)檢測(cè)算法,要使檢測(cè)過(guò)程不依賴前期分割結(jié)果,且不需要進(jìn)行求導(dǎo)和梯度運(yùn)算,那么它必須具有很強(qiáng)的抗干擾能力。與此同時(shí),由于可以不用計(jì)算圖像的灰度導(dǎo)數(shù),因此不需要進(jìn)行去噪處理,
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48

- 計(jì)算機(jī)與數(shù)字工程的其它文章
- 基于改進(jìn)模糊神經(jīng)網(wǎng)絡(luò)的公共建筑節(jié)能改造費(fèi)用估算研究?
- 面向變電站監(jiān)控的無(wú)線傳感器網(wǎng)絡(luò)設(shè)計(jì)?
- 含風(fēng)力發(fā)電系統(tǒng)的最優(yōu)動(dòng)態(tài)發(fā)電調(diào)度研究?
- 基于機(jī)載激光掃描三維重建的基建驗(yàn)收?
- 基于改進(jìn)螢火蟲(chóng)算法的鐵路運(yùn)行調(diào)度算法研究?
- 信號(hào)特征提取方法在球磨機(jī)故障診斷中的應(yīng)用?