基于高精密AD軸角轉換芯片的測角技術研究
2019-11-11 11:44:15婁敏趙英
科技創新與應用 2019年28期
婁敏 趙英
摘 ?要:圓感應同步器作為一種測角傳感器其常用的解碼芯片為AD2S80,此芯片具有體積大、電源要求高、轉速低、配置元件多等局限,使得其使用起來有諸多不便,文章介紹一種可用于圓感應同步器信號解碼的專用芯片AD2S1210,它能夠將圓感應同步器輸出的模擬量轉為數字量,同時具有體積小、配置元件少、供電簡單、轉速高等諸多優點。
關鍵詞:圓感應同步器;定子;轉子;AD2S1210
中圖分類號:TH712 ? ? ? ? 文獻標志碼:A ? ? ?文章編號:2095-2945(2019)28-0163-02
Abstract: As a kind of angle measuring sensor, the common decoding chip of rotary Inductosyn is AD2S80, which has many limitations, such as large size, high power requirement, low speed, many configuration elements and so on, which makes it inconvenient to use. This paper introduces a special chip AD2S1210, which can be used for circular Inductosyn signal decoding, which can convert the analog output of circular Inductosyn into digital quantity. At the same time, it has the advantages of small size, few configuration elements, simple power supply and high rotational speed.
Keywords: Rotary Inductosyn; stator; rotor; AD2S1210
引言
圓感應同步器直接輸出的是模擬信號,此模擬信號經解碼后被轉為數字信號,可被后續控制系統接收。目前工業上應用較多的解碼芯片是AD2S80[1],此芯片具有體積大、電源要求高、轉速低、配置元件多等局限,使得其使用起來有諸多不便,本文介紹一種可用于圓感應同步器信號解碼的專用芯片AD2S1210,它能夠將圓感應同步器輸出的模擬量轉為數字量,同時具有體積小、配置元件少、供電簡單、轉速高等諸多優點。
1 圓感應同步器測角系統的工作原理
圓感應同步器是通過對其轉子施加交流激勵信號,定子將感應出兩相的sin、cos正余弦信號,兩路信號在空間相位上相差90度電角度,當sin信號幅度最大時,cos信號幅度最小,反之當cos信號幅度最大時,sin信號幅度最小,當處于某個電角度φ,sin信號的幅度為Asinφ,cos信號的幅度為Acosφ,式中A為sin(或cos)信號的最大幅度值[2]。
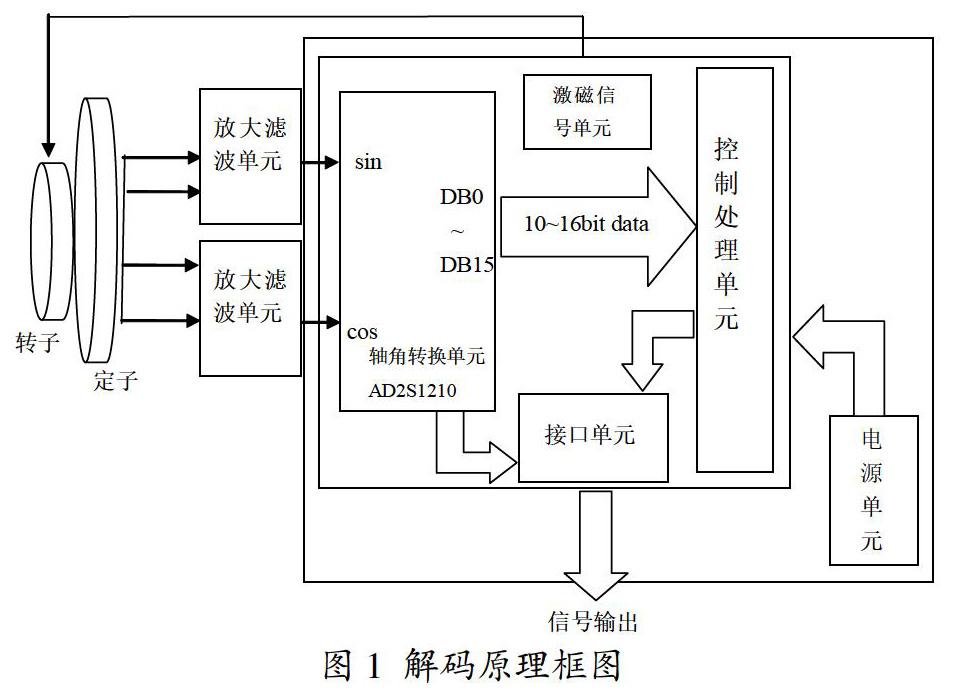
本文選用美國ADI公司軸角轉換芯片AD2S1210作為核心角度解碼器,它可以直接輸出10KH在的交流激勵信號驅動同步器轉子工作,同時能接收定子感應出的sin、cos信號并將其轉換成代表角度值的數字量,以該芯片為核心搭建的系統框圖如圖1。
圖1為圓感應同步器的解碼原理框圖,電路系統要通過激磁信號單元發出一個交流信號驅動轉子工作,定子感應出與同頻率的sin、cos信號在放大濾波單元中進行信號調理[3],經軸角轉換單元后由控制處理單元進行接收,隨后再由接口單元進行信號輸出。
2 AD2S1210芯片在角度解碼中的應用
2.1 AD2S1210芯片簡介
軸角轉換單元中的主要器件即AD2S1210,AD2S1210具有14位分辨率,相對于廣泛使用的AD2S80軸角轉換芯片,其主要優點如下:
(1)尺寸小:AD2S80為51mm*16mm,AD2S1210為9mm*9mm;
(2)供電簡單:AD2S80需要+12V、-12V、+5V三種電源供電,AD2S1210僅需+5V供電;
(3)外圍配置簡單:AD2S80在使用時需根據分辨率不同而配置不同的電阻、電容元件,AD2S1210外圍分立配置元件少;
(4)跟蹤轉速高:AD2S180在14位分辨率下對應的跟蹤轉速為65轉/秒。AD2S1210在14位分辨率下對應的跟蹤轉速為500轉/秒。
2.2 AD2S1210的控制引腳設置
AD2S1210芯片的兩相輸入sin、cos信號是感應同步器輸出信號,通過AD2S1210 將輸入信號轉化為自然的二進制數字角度,這是實現系統功能的關鍵。AD2S1210是一種可變分辨率、單片數字分解轉換器,該芯片具有48個引腳,其內部有15個控制寄存器,8種讀寫時序。因此通過對其內部控制時序進行合理設置是實現軸角轉換的關鍵技術。
本文采用CPLD來實現控制控制處理單元,用于控制AD2S1210,其中控制引腳共12個,分別為RES0、RES1、CS、RD、WR、SOE、SAMPLE、A0、A1、DOS、LOT、RESET。下面對這些控制引腳進行介紹:
(1)當對RES0設置為0、RES1設置為1時即可將芯片的分辨率設置為14位;
(2)令CS=0即對該芯片進行片選;
(3)可通過設置RD、WR的引腳來對芯片的控制寄存器及位置數據進行讀取、寫入;
(4)通過設定SOE=1實現并行傳輸,芯片的角度數字量通過DB1~DB16輸出;
(5)SAMPLE發生下降沿將轉換完成的數據進行鎖存;
(6)DB1~DB14為數據位,其中DB14為數據的最高位,DB1為數據的最低位;
(7)令A0=1、A1=1時設置AD2S1210芯片的工作模式為構造模式,在構造模式下可讀取芯片的誤差寄存器,設置芯片的各控制寄存器的參數。令A0=0、A1=0時設置AD2S1210芯片的工作模式為正常模式,在該模式下讀取角度位置;
(8)DOS、LOT的電平值有任何一位為低電平時則表示有誤差;
(9)RESET引腳在芯片上電時需置0,隨后置高以使得芯片正常工作。
2.3 AD2S1210硬件電路圖
圖2為AD2S1210芯片的硬件電路圖,由圖可見芯片外圍器件除了濾波、晶振外,無需任何其他配置器件。
3 系統檢測
測試過程中所用的硬件設備如下:
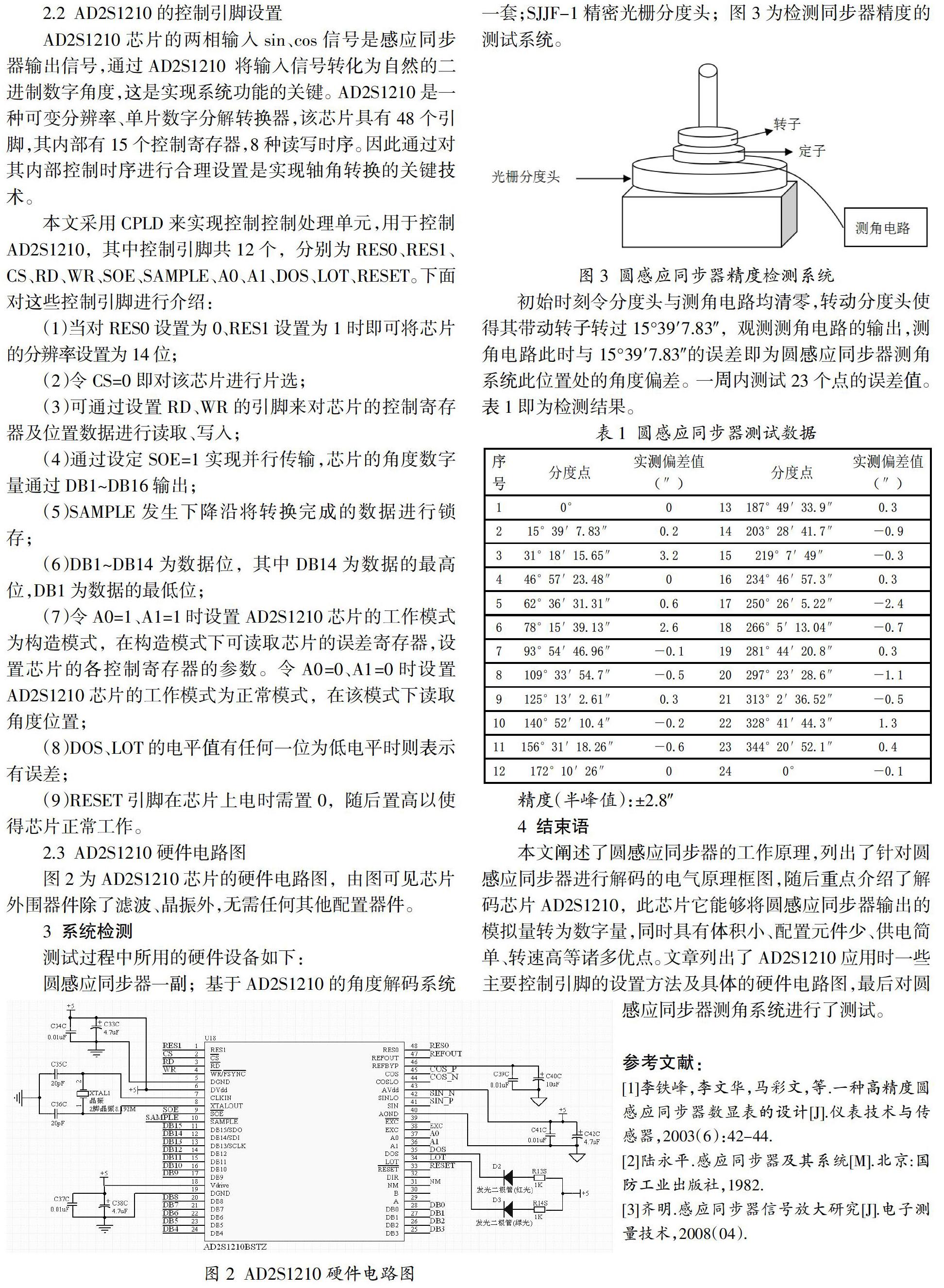
圓感應同步器一副;基于AD2S1210的角度解碼系統一套;SJJF-1精密光柵分度頭;圖3為檢測同步器精度的測試系統。
初始時刻令分度頭與測角電路均清零,轉動分度頭使得其帶動轉子轉過15°39′7.83″,觀測測角電路的輸出,測角電路此時與15°39′7.83″的誤差即為圓感應同步器測角系統此位置處的角度偏差。一周內測試23個點的誤差值。表1即為檢測結果。
4 結束語
本文闡述了圓感應同步器的工作原理,列出了針對圓感應同步器進行解碼的電氣原理框圖,隨后重點介紹了解碼芯片AD2S1210,此芯片它能夠將圓感應同步器輸出的模擬量轉為數字量,同時具有體積小、配置元件少、供電簡單、轉速高等諸多優點。文章列出了AD2S1210應用時一些主要控制引腳的設置方法及具體的硬件電路圖,最后對圓感應同步器測角系統進行了測試。
參考文獻:
[1]李鐵峰,李文華,馬彩文,等.一種高精度圓感應同步器數顯表的設計[J].儀表技術與傳感器,2003(6):42-44.
[2]陸永平.感應同步器及其系統[M].北京:國防工業出版社,1982.
[3]齊明.感應同步器信號放大研究[J].電子測量技術,2008(04).