嫦娥四號著陸器定向中繼鏈路指向及盲捕策略
2019-11-11 01:26:54張婷趙洋楊眉李飛
航天器工程 2019年4期
張婷 趙洋 楊眉 李飛
(北京空間飛行器總體設(shè)計部,北京 100094)
嫦娥四號任務(wù)是人類首次月球背面軟著陸的探測任務(wù)[1-2],嫦娥四號探測器與中繼衛(wèi)星之間的中繼鏈路是任務(wù)實施的關(guān)鍵環(huán)節(jié)。
嫦娥四號中繼衛(wèi)星位于地月L2點的平動點軌道,著陸于月球背面的著陸器與巡視器,由于受到月球遮擋,對地球處于不可見狀態(tài)。上行遙控及下行遙測(科學數(shù)據(jù))無法對地直接傳輸,只能通過與中繼衛(wèi)星之間的前/返向測控數(shù)傳鏈路進行傳輸,與地面系統(tǒng)進行數(shù)據(jù)交互。早在20世紀70年代,F(xiàn)arqubar[3]就提出了發(fā)射一顆中繼衛(wèi)星至地月L2點Halo軌道以支持月球背面載人任務(wù)的設(shè)想;2011年,美國Artemis任務(wù)的兩個航天器首次進入L1/L2平動點軌道進行探測;近年來,我國也分別在2011年的嫦娥二號擴展任務(wù)中和2014年的嫦娥五號試驗星中,開展了日地系L2點和地月系L2點軌道試驗。美國國家航空航天局(NASA)等航天機構(gòu)也在近年開展了很多以月球或其他天體為探測目標的中繼通信衛(wèi)星相關(guān)工作。
中繼定向通信鏈路是嫦娥四號著陸器對“鵲橋”中繼衛(wèi)星通信的關(guān)鍵通信鏈路,承擔著著陸器著陸月球背面后,對中繼衛(wèi)星的返向數(shù)據(jù)傳輸任務(wù)。如何保證著陸器上定向天線對中繼衛(wèi)星的精確指向,以確保定向通信鏈路的可靠不丟失,是嫦娥四號定向中繼鏈路設(shè)計中需要重點解決的問題。本文結(jié)合嫦娥四號月背中繼通信任務(wù)需求,對中繼定向通信鏈路天線指向控制策略及鏈路丟失后盲捕方案的設(shè)計和在軌驗證情況進行了介紹。
1 任務(wù)分析及特點
嫦娥四號任務(wù)中,探測器著陸于月球背面,不能直接對地球通信,只能通過與“鵲橋”中繼衛(wèi)星之間的通信鏈路,間接實現(xiàn)與地球測控站的通信。著陸月球背面后,著陸器、中繼衛(wèi)星及地面站之間的中繼通信鏈路規(guī)劃如圖1所示[4]。
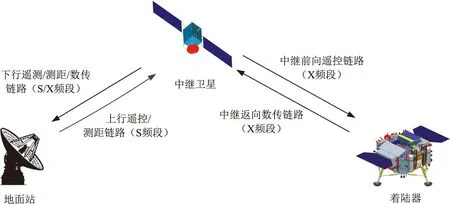
圖1 嫦娥四號著陸器中繼通信鏈路規(guī)劃
在月面工作期間,著陸器通過器上全向天線接收中繼衛(wèi)星轉(zhuǎn)發(fā)的前向遙控信號;著陸器的返向數(shù)傳信號(含遙測及科學探測數(shù)據(jù))通過著陸器的全向天線及定向天線發(fā)送,中繼衛(wèi)星通過星載4.2 m大口徑天線接收和發(fā)送。
在嫦娥三號任務(wù)中,著陸器在月球正面著陸后,定向天線展開后即指向地球。定向天線對地指向的控制由地面根據(jù)測定軌結(jié)果進行計算,通過地面站指令或數(shù)據(jù)注入,開環(huán)控制其轉(zhuǎn)動方向,以使地面站能夠迅速捕獲著陸器下行鏈路。如在對地指向過程中出現(xiàn)故障,則由地面結(jié)合著陸器遙測參數(shù)及地面站接收到的衛(wèi)星下行信號,進行判別,并進入盲捕程序。對于盲捕過程的判定及相關(guān)操作,在嫦娥三號任務(wù)中,主要依賴于地面站頻譜儀、基帶等設(shè)備以及地面站操作人員進行監(jiān)視及初步定位,配合進行對探測器信號的搜索捕獲。
在嫦娥四號任務(wù)中,著陸器定向天線波束的指向?qū)ο鬄橹欣^衛(wèi)星而非地球,需結(jié)合中繼衛(wèi)星的運行軌道及實時位置、姿態(tài)等計算并控制著陸器天線的實時波束指向方向。在定向天線波束的指向過程中,由于著陸器本身著陸位置及姿態(tài)誤差、中繼衛(wèi)星的軌道測量誤差以及定向天線自身指向控制偏差等問題,都可能導致中繼鏈路的丟失。同時,由于中繼鏈路時延大,導致的中繼鏈路捕獲困難、效率低等問題,均需通過盲捕操作來實現(xiàn)鏈路的重捕獲。與嫦娥三號任務(wù)中對地通信不同的是,盲捕過程中,無法及時通過地面接收設(shè)備等輔助設(shè)備進行判別及輔助操作,需通過中繼衛(wèi)星對定向天線信號進行捕獲和識別。
2 中繼鏈路指向概述
2.1 著陸器與中繼衛(wèi)星空間位置
嫦娥四號中繼衛(wèi)星“鵲橋”的使命軌道為地月系L2平動點軌道。地月系L2平動點位于地月連線的延長線上,距月球距離約6.5~7.9萬千米。由于地月距離是變化的,L2點距離月球的距離也是變化的,變化周期和月球軌道周期一致。圖2為L2點軌道示意圖。L2平動點軌道始終對準月球背面,同月球一起圍繞地球公轉(zhuǎn),中繼軌道約14天運行一個周期,平均角速度約1(°)/h,角速度變化緩慢。
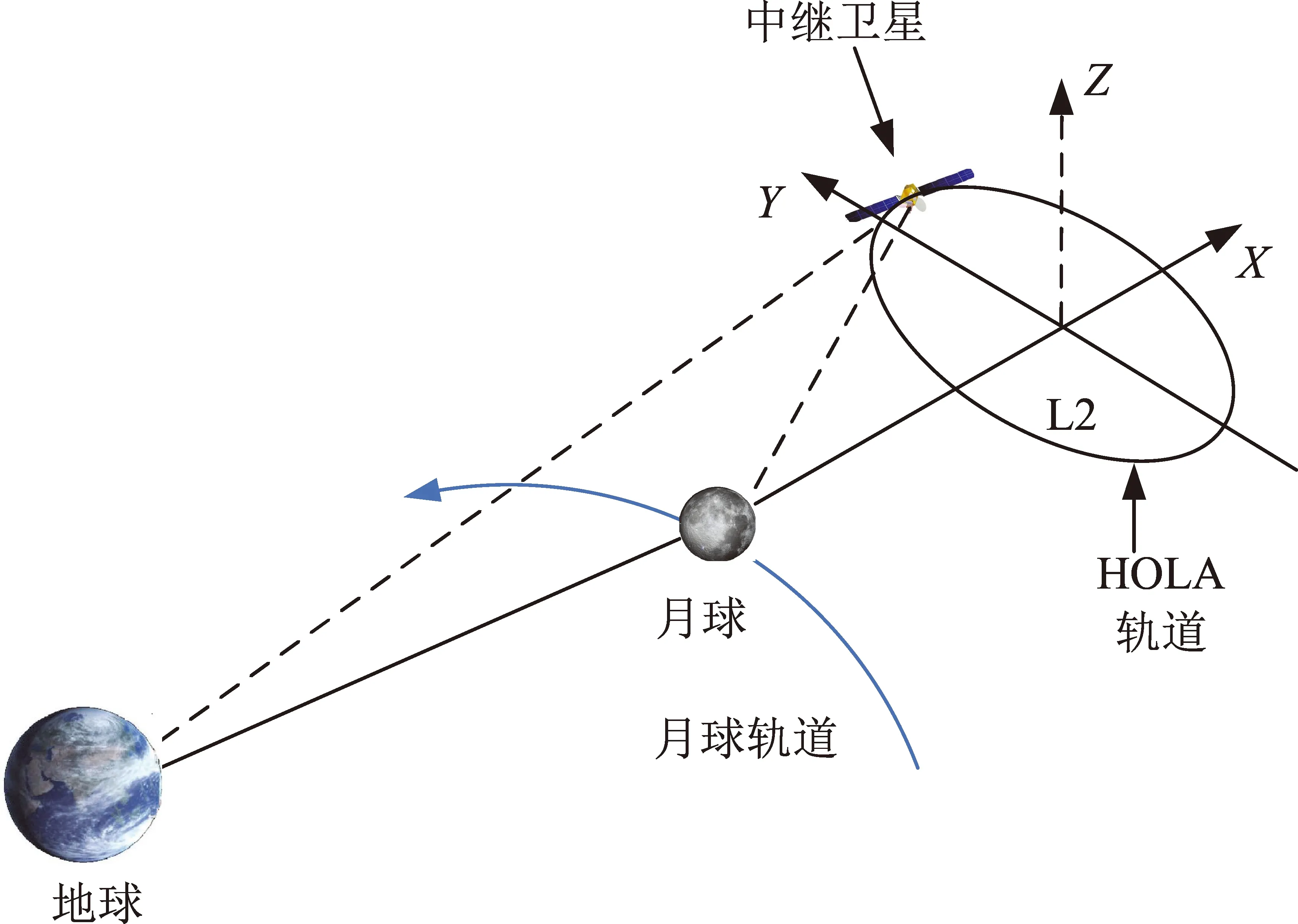
圖2 中繼衛(wèi)星地月L2平動點軌道示意圖
2.2 著陸器及中繼衛(wèi)星定向天線指向概述
嫦娥四號著陸器定向天線在繼承嫦娥三號設(shè)計的基礎(chǔ)上,在天線波束設(shè)計中,充分考慮了對地球站及中繼衛(wèi)星的覆蓋性[5-6]。在中繼衛(wèi)星發(fā)射前,針對2018年5月、6月不同發(fā)射窗口的中繼衛(wèi)星軌道,綜合考慮著陸姿態(tài)偏差,以及主、備著陸區(qū)的不同約束后,對著陸器指向中繼衛(wèi)星的在軌最大指向范圍進行了計算。著陸器對中繼衛(wèi)星中繼鏈路的指向范圍最大出現(xiàn)在一個橢圓范圍內(nèi),將此范圍定義為定向天線的雙軸轉(zhuǎn)動范圍。經(jīng)綜合分析,通過一定的指向控制策略,通過地面控制著陸器定向天線定時間隔轉(zhuǎn)動,應(yīng)確保能夠使天線指向中繼衛(wèi)星。
中繼衛(wèi)星星載定向天線尺寸較大,天線自帶驅(qū)動機構(gòu)質(zhì)量代價太大,因此,中繼衛(wèi)星定向天線不配置雙軸轉(zhuǎn)動機構(gòu),而是通過地面注入的軌道參數(shù),由星上導航、制導與控制(GNC)系統(tǒng)進行軌道外推,調(diào)整整星姿態(tài)指向著陸器,在任務(wù)期間,確保中繼衛(wèi)星對月定向天線能夠?qū)崟r覆蓋著陸器。同時也避免了復雜的定向天線捕跟系統(tǒng),大大簡化了中繼系統(tǒng)的設(shè)計。
3 定向天線概述及指向精度分析
3.1 定向天線概述
嫦娥四號著陸器定向天線安裝于著陸器上艙頂板,在探測器發(fā)射段、飛行段及動力下降段均處于壓緊狀態(tài)。著陸月球表面后,定向天線完成解鎖并指向中繼衛(wèi)星方向[7-8]。在整個在軌任務(wù)期間,實時完成對中繼衛(wèi)星的捕獲跟蹤及實時指向,以保證期間通信鏈路的正常實現(xiàn)。
圖3為定向天線在著陸器上壓緊安裝位置。圖4為在軌“玉兔二號”巡視器所拍攝的著陸器,定向天線正在指向中繼衛(wèi)星方向。

圖3 定向天線在著陸器上安裝位置
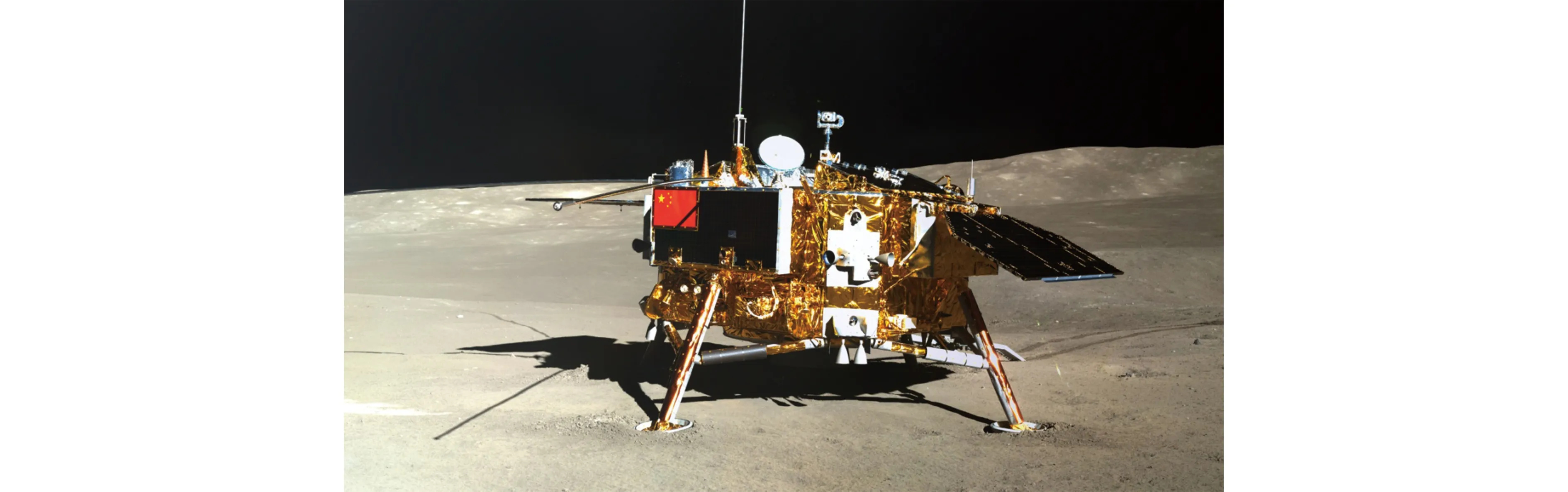
圖4 定向天線在月球背面指向中繼衛(wèi)星(巡視器拍攝)
3.2 天線指向精度分析
制定天線指向控制策略,必須考慮天線在指向過程中各個環(huán)節(jié)的誤差,并分析這些誤差對指向角度的影響[9]。在計算嫦娥四號著陸器定向天線對中繼衛(wèi)星的指向時,需結(jié)合兩器位置誤差、對天線的控制誤差以及各器的時差誤差等各因素進行分析及計算。著陸器對中繼衛(wèi)星的指向精度主要包括:著陸器及中繼衛(wèi)星的位置誤差、測量誤差、星歷誤差等,定向天線自身由于雙軸驅(qū)動機構(gòu)特性及拋物面的熱特性,也存在一定的誤差影響指向精度。結(jié)合本次任務(wù),對天線指向精度進行分解說明,如圖5所示,根據(jù)圖5可簡要分析構(gòu)成誤差的各部分因素。
1)測量誤差對指向影響
測量誤差主要包括定向天線的零位基準誤差δ1(安裝精測后得到)、著陸器的位置測量誤差δ2(由動力下降段GNC敏感器外推信息及降落相機拍攝結(jié)果的地形匹配得到)、中繼衛(wèi)星的位置誤差δ3(地面測定軌測量誤差)以及著陸器的姿態(tài)誤差δ4(GNC測量誤差)等。經(jīng)分解,由測量誤差導致的天線對中繼衛(wèi)星的指向誤差σ1=δ1+δ2+δ3+δ4≈1.5°。
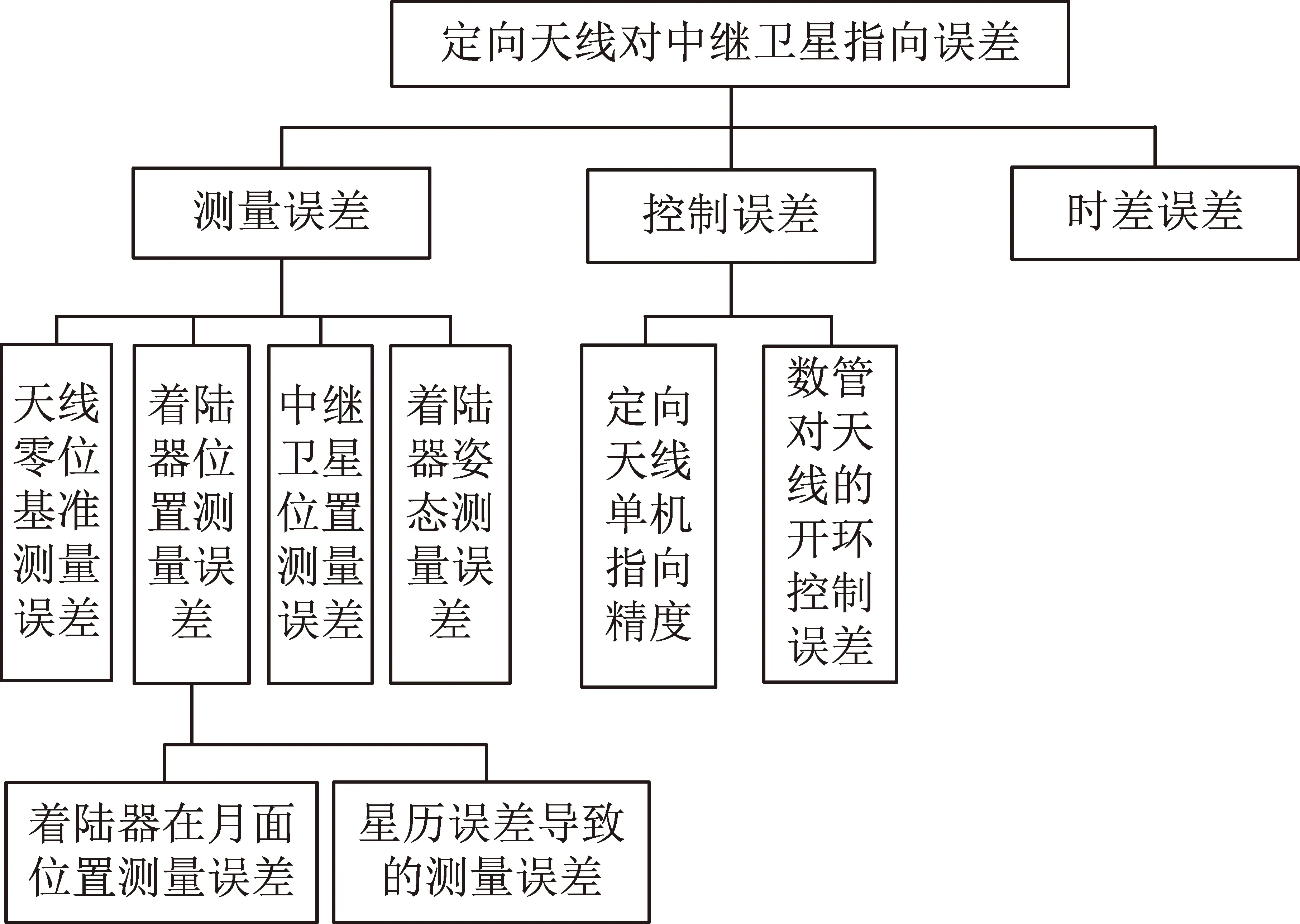
圖5 定向天線對中繼衛(wèi)星指向誤差分解圖
2)控制誤差對指向影響
控制誤差引起的天線對中繼衛(wèi)星的指向誤差主要包括天線單機的指向精度(含器上安裝精測誤差)δ1以及數(shù)管對天線轉(zhuǎn)動的開環(huán)控制誤差δ2。經(jīng)分析,由控制誤差引起的天線對中繼衛(wèi)星的最大指向誤差σ2=δ1+δ2≈0.5°。
3)器星時差對指向影響
著陸器和中繼衛(wèi)星器(星)-地時間的差異,造成的指向角度誤差主要取決于定向天線轉(zhuǎn)動的角速度。結(jié)合著陸器主著陸區(qū)中心點及著陸標稱姿態(tài),對著陸器對中繼衛(wèi)星指向過程中的角速度進行了分析,結(jié)果見圖6和圖7。
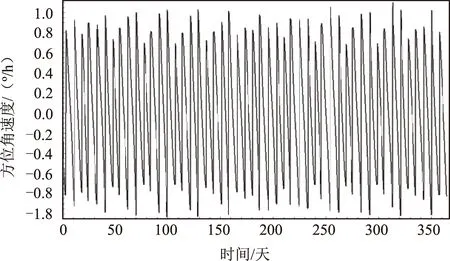
圖6 天線對中繼衛(wèi)星指向方位角速度
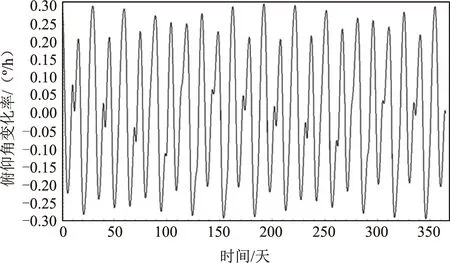
圖7 天線對中繼衛(wèi)星指向俯仰角速度
如圖6,7所示,著陸器相對中繼衛(wèi)星指向的方位角最大角速度約1.36(°)/h、俯仰角最大角速度約0.31(°)/h;著陸器與中繼衛(wèi)星均由地面進行授時,最大器(星)-地時差不大于6 s。計算可得,在最大器(星)-地時差內(nèi),中繼衛(wèi)星角度最大變動σ3約為0.002°。
由上述分析可知,綜合各種因素,著陸器定向天線對中繼衛(wèi)星指向誤差最大約為:σ=σ1+σ2+σ3≈1.5°+0.5°+0.002°=2.002°。即,著陸器定向天線對中繼衛(wèi)星指向誤差最大不超過±2.1°。結(jié)合此指向誤差可規(guī)劃天線開環(huán)控制的指向控制策略。
4 定向天線月面工作指向及控制策略
與嫦娥三號著陸器對地通信過程不同,嫦娥四號中繼衛(wèi)星軌道為L2平動點軌道,幅值為X向約±1.2萬千米,Y向約±3.7萬千米,Z向約±1.3萬千米。L2平動點軌道始終對準月球背面,同月球一起圍繞地球公轉(zhuǎn)。嫦娥四號著陸器對中繼衛(wèi)星實現(xiàn)通信時,中繼衛(wèi)星與月球距離不大于8萬千米,中繼衛(wèi)星天線波束對著陸器和巡視器實現(xiàn)100%的覆蓋,因此中繼衛(wèi)星與著陸器二者為全時段可見。在分析中,可將中繼衛(wèi)星視為在L2平動點軌道上的地球測控站或應(yīng)用站。
4.1 月面正常捕獲跟蹤指向控制策略
如取主著陸區(qū)中心點,以標稱姿態(tài)為例對中繼衛(wèi)星指向進行一年的指向分析,如圖8所示。
如以上分析,著陸器定向天線對中繼衛(wèi)星方位角最大變化約28.5(°)/天,俯仰角最大變化約7.5(°)/天。中繼軌道約14天運行一個周期,平均速度約1(°)/h,角速度變化緩慢。著陸器定向天線的波束覆蓋范圍為±3.5°,因此,通過地面控制著陸器定向天線定時轉(zhuǎn)動,可以確保其實時指向中繼衛(wèi)星。
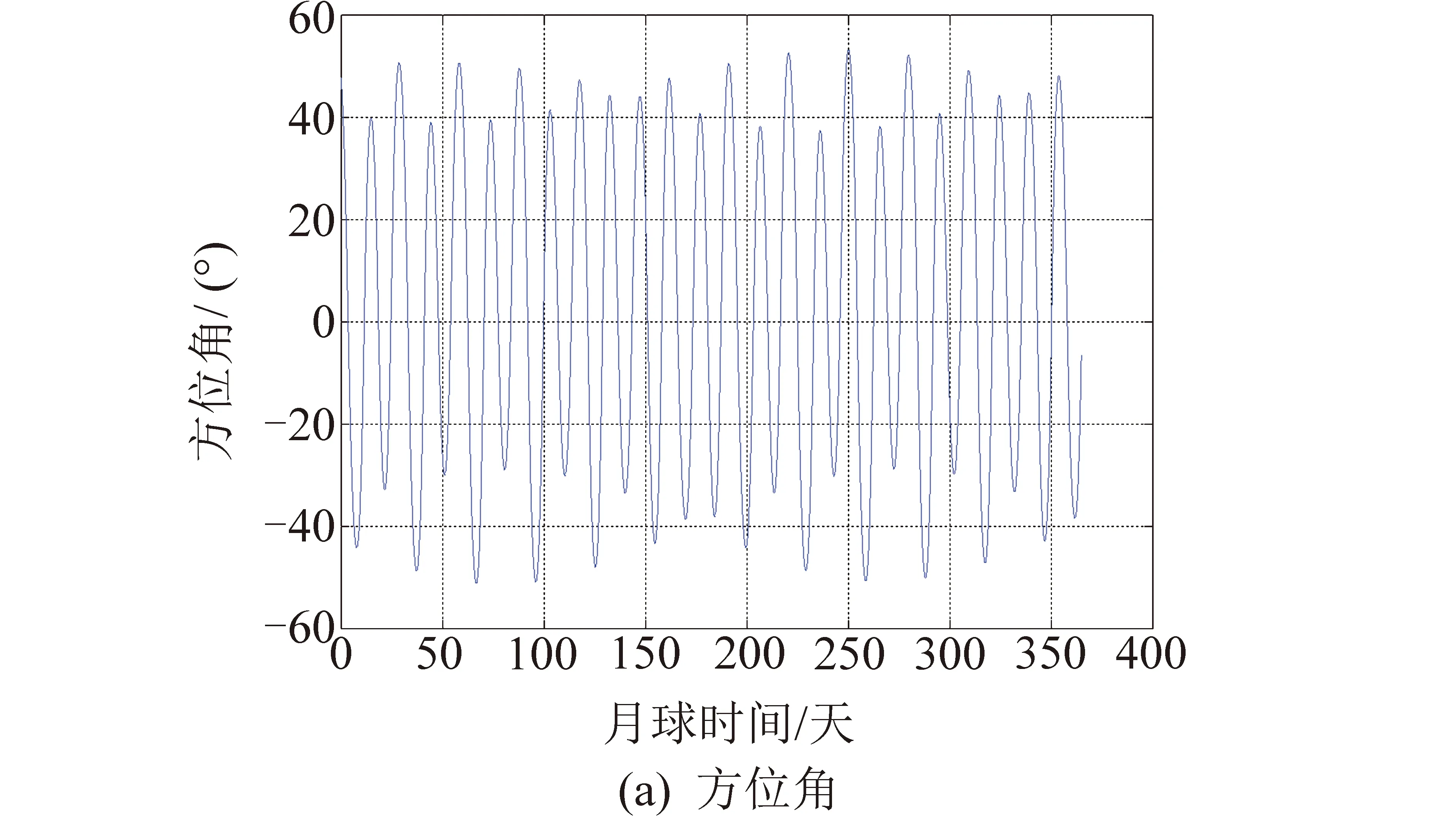
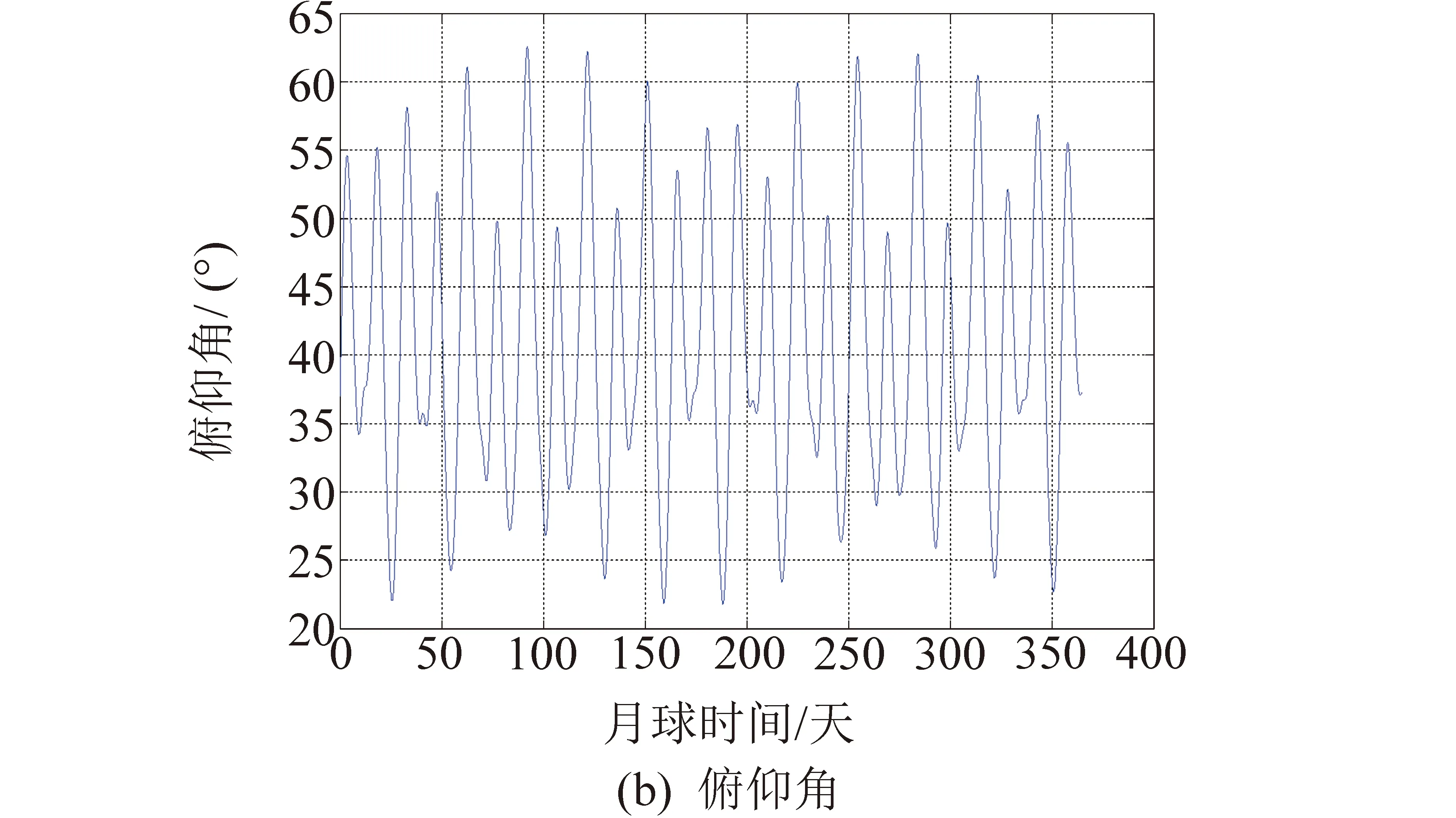
圖8 定向天線對中繼衛(wèi)星指向角度
探測器著陸后,著陸器定向天線捕獲跟蹤正常程序如下。
(1)著陸器著陸后,定向天線解鎖,天線驅(qū)動機構(gòu)完成從壓緊點到天線零位的回零操作。
(2)地面站依據(jù)中繼衛(wèi)星下傳的著陸器的實際著陸點經(jīng)緯度以及著陸器慣性姿態(tài)數(shù)據(jù),計算著陸器——中繼衛(wèi)星連接矢量在著陸器機械坐標系的指向,得到定向天線反射面機械軸相對中繼衛(wèi)星的轉(zhuǎn)動角度數(shù)據(jù),并據(jù)此生成定向天線雙軸轉(zhuǎn)動控制的數(shù)據(jù)注入塊[10]。地面通過數(shù)據(jù)注入發(fā)送給中繼衛(wèi)星并通過中繼衛(wèi)星與著陸器之間的全向通信鏈路轉(zhuǎn)發(fā)后,控制天線雙軸轉(zhuǎn)動,建立返向通信鏈路。簡化的計算過程為:
①結(jié)合時刻T(UTC)、著陸器機械坐標系相對著陸點當?shù)刈鴺讼店P(guān)系、著陸點月理坐標以及定向天線當前指向位置,計算出著陸點-中繼衛(wèi)星矢量在月固坐標系中位置,通過坐標系轉(zhuǎn)換,獲得矢量在機械坐標系中位置,再通過此位置矢量計算著陸點-中繼衛(wèi)星矢量在著陸器機械坐標系中的方位角A1和高度角E1,從而得到本次天線需轉(zhuǎn)動的角度。定向天線指向步數(shù)計算:轉(zhuǎn)動步數(shù)=(下次理論角度值-當前步數(shù)計數(shù)器角度值)/0.018° (0.018°為天線雙軸轉(zhuǎn)動機構(gòu)的步距角)。
②根據(jù)著陸器定向天線對中繼衛(wèi)星指向的范圍,考慮定向天線中心波束指向中繼衛(wèi)星時,半波束可覆蓋的中繼衛(wèi)星軌道范圍進行預算,使得間隔一定時間控制定向天線波束跟隨中繼衛(wèi)星軌道轉(zhuǎn)動,確保波束中心指向著陸器-中繼衛(wèi)星連接矢量方向,保證對中繼衛(wèi)星的穩(wěn)定跟蹤。
③著陸器著陸月球表面后,結(jié)合中繼衛(wèi)星對地測控弧段進行對著陸器定向天線指向的調(diào)整。定向天線對中繼衛(wèi)星指向調(diào)整的原則為:依據(jù)計算結(jié)果實時控制天線指向著陸器-中繼衛(wèi)星矢量。由于定向天線的波束張角為±3.5°,則返向鏈路在指向中繼衛(wèi)星時隨中繼衛(wèi)星運動可能丟失。由于著陸器定向天線對中繼衛(wèi)星指向誤差最大不超過±2.1°(見前文分析),因此定義定向天線對中繼衛(wèi)星指向變化超過波束角與指向誤差值的差角1.4°時,對定向天線指向進行調(diào)整。即定向天線角度指向調(diào)整原則為,地面提前計算著陸器-中繼衛(wèi)星持續(xù)的矢量變化,如大于1.4°,則進行定向天線指向機構(gòu)的角度調(diào)整,使定向天線波束指向天線調(diào)整時刻的著陸器-中繼衛(wèi)星矢量指向。
4.2 在軌不同工作時段天線指向控制策略
根據(jù)以上調(diào)整時機及原則,定向天線在著陸初期第一個連續(xù)測控弧段以及后續(xù)正常工作期間,角度指向控制策略如下。
1)著陸初期第一個中繼衛(wèi)星對地弧段
根據(jù)嫦娥四號著陸器首發(fā)窗口標稱著陸時間,著陸后連續(xù)測控弧段有將近20 h。期間著陸器定向天線需要調(diào)整約5次。因此,在著陸器著陸后,天線解鎖并指向中繼衛(wèi)星完成中繼鏈路建立后,隨即注入24 h的天線雙軸機構(gòu)延時指令數(shù)據(jù),使天線實時指向著陸器-中繼衛(wèi)星矢量位置。
2)探測器在軌工作段
后續(xù)實際飛控操作中,天線指向調(diào)整的策略為:每天結(jié)合中繼衛(wèi)星軌道計算當日著陸器-中繼衛(wèi)星矢量,并在每天進入中繼衛(wèi)星跟蹤弧段后,地面注入當日天線雙軸機構(gòu)轉(zhuǎn)動的所有延時數(shù)據(jù)注入,對定向天線角度進行調(diào)整,使得天線當日在弧段內(nèi)外能夠?qū)崟r指向著陸器-中繼衛(wèi)星矢量方向。
3)天線指向調(diào)整延時數(shù)據(jù)注入需求及限制
根據(jù)估算,在著陸器的壽命周期中,著陸器相對中繼衛(wèi)星指向調(diào)整每日次數(shù)不等,最多一日為每小時調(diào)整1次,即24 h內(nèi)需調(diào)整指向24次。因此,需考慮到著陸器每日延時數(shù)據(jù)注入的最大限制,確保延時指令注入條數(shù)不超過限制。
5 中繼定向鏈路丟失后的盲捕策略
著陸器著陸后,定向天線轉(zhuǎn)動到中繼衛(wèi)星位置時,如中繼衛(wèi)星無法捕獲到天線下傳信號,無法實現(xiàn)對著陸器數(shù)傳信號的接收解調(diào)及轉(zhuǎn)發(fā),排除中繼衛(wèi)星接收問題后,可判斷天線進入在軌盲捕模式。出現(xiàn)以上問題的原因主要為以下幾項。
(1)著陸器著陸過程姿態(tài)控制超差,或著陸后GNC系統(tǒng)姿態(tài)測量設(shè)備等出現(xiàn)故障,無法給出著陸姿態(tài);
(2)GNC系統(tǒng)給出的姿態(tài)數(shù)據(jù)偏差大,導致定向天線在軌展開后,無法準確計算天線軸線與中繼衛(wèi)星相對位置;
(3)天線角度傳感器出現(xiàn)故障,天線無法歸零或歸零錯誤。
5.1 盲捕范圍的確定
盲捕最大范圍取決于固定窗口及已選著陸區(qū)情況下,探測器著陸后,天線相對中繼衛(wèi)星的指向最大范圍。月面工作段影響著陸器到中繼衛(wèi)星指向矢量變化的因素包括:工作時間、著陸點位置、中繼衛(wèi)星位置以及著陸姿態(tài)偏差。
針對中繼衛(wèi)星確定的發(fā)射窗口,月面工作段著陸器在不同位置以標稱姿態(tài)著陸,著陸器到中繼衛(wèi)星指向的方位角和俯仰角(即相對著陸點天西南坐標系)最大包絡(luò)角度變化范圍為:方位角:-54°~+67°;俯仰角:14°~64°,即可規(guī)定在盲捕中,方位角搜索范圍約120°,俯仰角搜索范圍約50°。在此范圍內(nèi)進行搜索,確保返向波束能夠被中繼衛(wèi)星捕獲。
5.2 不同指向偏差時的盲捕策略
對于目的為中繼衛(wèi)星的掃描搜索,其搜索范圍一般應(yīng)結(jié)合中繼衛(wèi)星軌道、深空探測器位置、姿態(tài)以及深空探測器和中繼衛(wèi)星的相互位置、相對運動規(guī)律等因素來確定。為減小搜索的時間和實現(xiàn)地面控制的簡易性,在進行盲捕操作時,可分為小范圍慢速掃描和大范圍快速掃描模式。這兩種模式主要用于使天線盡快找到中繼衛(wèi)星位置,進行著陸器對中繼衛(wèi)星的初步定位,完成遙測及數(shù)傳數(shù)據(jù)下傳。
5.3 小范圍慢速掃描搜捕模式
小范圍掃描模式主要應(yīng)用于著陸器初始著陸姿態(tài)偏差誤差較小,天線指向偏離范圍不大的情況。
考慮到著陸器與中繼衛(wèi)星之間返向鏈路的余量以及天線波束寬度等因素,確定小范圍搜索捕獲的搜索范圍(±θ)。以掃描起始點為中心,在此小范圍內(nèi)進行慢速直線掃描,設(shè)定天線轉(zhuǎn)動速度為慢速轉(zhuǎn)動。在搜索捕獲時,采取“一步一判”的方法,即天線每轉(zhuǎn)動掃描1°,控制天線停轉(zhuǎn),對中繼衛(wèi)星下行遙測進行判讀。如遙測顯示,中繼接收機已鎖定著陸器定向天線傳輸?shù)姆迪蛐盘枺瑒t控制天線停掃;如未鎖定,則控制天線繼續(xù)按圖9的路徑圖掃描,直至中繼接收機鎖定。具體步驟如下。
(1)根據(jù)實際著陸點位置、著陸時刻、標稱著陸姿態(tài),計算標稱的定向天線指向目標方位角ATX,目標俯仰角ETX。
(2)定向天線按正常工作程序完成解鎖并首次歸零后,指向目標方位角ATX,目標俯仰角ETX。
(3)以方位角ATX,俯仰角ETX為中心,在方位角ATX-θ~ATX+θ,俯仰角ETX-θ~ETX+θ的范圍內(nèi)進行粗捕。粗捕路徑及過程描述為:①控制天線從位置(ATX,ETX)開始轉(zhuǎn)動到(ATX+1°,ETX),轉(zhuǎn)動速度為慢速;②天線停轉(zhuǎn)后,監(jiān)視中繼衛(wèi)星中繼接收機鎖定遙測:如遙測值顯示信號已捕獲,即中繼衛(wèi)星接收機已實現(xiàn)載波鎖定及幀同步,可以正常接收定向天線下傳的遙測及數(shù)傳數(shù)據(jù)。此時可以停止盲捕流程,進入正常工作模式;③重復上述步驟①~②,天線從位置(ATX,ETX)開始轉(zhuǎn)動到(ATX+θ,ETX),轉(zhuǎn)動到(ATX+θ,ETX+1°)如圖9中虛線所示;④重復上述路徑,本次粗搜索轉(zhuǎn)動到(ATX-θ,ETX-θ)結(jié)束。
如采用小范圍掃描模式無法搜索到著陸器下行信號,可通過大范圍快速掃描模式繼續(xù)搜索信號。

圖9 小范圍慢速掃描模式路徑示意圖
5.4 大范圍快速搜捕模式
大范圍快速搜捕模式的目的主要用于快速發(fā)現(xiàn)著陸器定向天線返向信號,進行天線對中繼衛(wèi)星的初步定位。此掃描模式主要用于著陸器初始姿態(tài)偏差誤差較大,或在小范圍慢速掃描中未能搜索到目標的情況。掃描起始點選擇定向天線對中繼衛(wèi)星指向區(qū)域的中心點位置,天線采用直線路徑方式進行搜索。
1) 捕獲策略
控制天線以可實現(xiàn)的最大轉(zhuǎn)速,在中繼衛(wèi)星相對于著陸器指向的可能范圍內(nèi)進行快速掃描搜索,由于天線轉(zhuǎn)速較快,因此能夠在較短時間內(nèi)完成對整個波束可能覆蓋范圍的掃描。(波束所有可能覆蓋范圍定義為(ΦA(chǔ),ΦB),由標稱著陸點位置、著陸時刻,著陸姿態(tài)以及中繼衛(wèi)星在整個任務(wù)期間的軌道決定)
大范圍快速掃描模式的搜索掃描角度覆蓋了著陸器對中繼衛(wèi)星指向的所有范圍。在掃描過程中,采用快速掃描模式找到中繼衛(wèi)星大致方向后(中繼接收機載波鎖定),需回到慢速掃描模式,直到中繼衛(wèi)星中繼接收機鎖定,遙測正常下傳為止。掃描路徑示意如圖10所示。
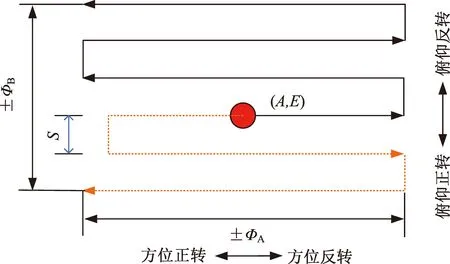
圖10 大范圍快速掃描路徑示意圖
2) 捕獲流程
(1)定向天線按正常程序完成解鎖并首次歸零后,控制定向天線指向目標方位角ATX,目標俯仰角ETX。
(2)以方位角ATX,俯仰角ETX為中心,方位角ATX-ΦA(chǔ)~ATX+ΦA(chǔ),俯仰角ETX-ΦB~ETX+ΦB進行粗捕。粗捕路徑及過程如下:①控制天線從位置(ATX,ETX)開始轉(zhuǎn)動到(ATX+ΦA(chǔ),ETX),轉(zhuǎn)動速度為快速轉(zhuǎn)動,如圖10中虛線所示;②從(ATX+ΦA(chǔ),ETX),轉(zhuǎn)動到(ATX+ΦA(chǔ),ETX+S),如圖10中虛線所示;(S為步長,步長的選擇可按照掃描范圍確定);③從(ATX+ΦA(chǔ),ETX+S),轉(zhuǎn)動到(ATX-ΦA(chǔ),ETX+S);④重復上述路徑,本次粗搜索轉(zhuǎn)動到(ATX-ΦA(chǔ),ETX+ΦB)結(jié)束。
(3)在上述天線單次轉(zhuǎn)動過程中,對中繼衛(wèi)星下行遙測進行監(jiān)視,在發(fā)現(xiàn)接收機鎖定后,停掃,并判斷粗捕結(jié)束。
與嫦娥三號著陸器盲捕操作相比,定向通信鏈路由對地改為對中繼衛(wèi)星,盲捕過程的實時判決缺少地面站的參與,因此需要通過對中繼衛(wèi)星的相關(guān)遙測量進行判決后再進行下一步規(guī)劃,降低了處置的實時性,同時也增加了盲捕策略的復雜度。
6 在軌實際驗證情況
嫦娥四號探測器于2019年1月3日著陸于月球背面后,定向天線順利完成電爆解鎖釋放,雙軸驅(qū)動機構(gòu)完成展開歸零,到達零位后再按照地面控制指令轉(zhuǎn)動到中繼衛(wèi)星方向,建立返向中繼鏈路。從落月后,定向天線雙軸回零,到完成平臺在軌交付用戶(截止至2019年2月1日20點),根據(jù)本文中所制定的天線指向控制策略,通過指令控制定向天線對中繼衛(wèi)星進行指向,期間機構(gòu)最快每隔約3 h左右調(diào)整一次,最慢每隔約5 h左右調(diào)整一次,定向天線雙軸共計對中繼衛(wèi)星指向69次,指向準確,星間鏈路工作正常。完成在軌交付至今的在軌試驗中,著陸器定向天線對中繼衛(wèi)星指向正常,未出現(xiàn)中繼鏈路丟失現(xiàn)象。
7 結(jié)束語
在首次地月L2點中繼通信任務(wù)中,結(jié)合任務(wù)特點,制定了嫦娥四號著陸器對中繼衛(wèi)星指向的天線控制策略及盲捕策略。根據(jù)定向天線對中繼衛(wèi)星的在軌指向結(jié)果及中繼數(shù)傳鏈路的工作狀態(tài),表明定向天線指向控制方案正確、指向策略合理、驗證充分,有效保證了嫦娥四號著陸器與中繼衛(wèi)星的中繼通信鏈路的暢通,圓滿支持了嫦娥四號探測器中繼通信任務(wù)。同時,本文提出的天線控制策略及盲捕策略也可為后續(xù)深空探測任務(wù)中天線指向控制策略的設(shè)計與驗證提供了參考。
