基于事件觸發的船舶航向自適應控制研究
2019-11-06 08:42:24羅云霞蔡建平
火力與指揮控制 2019年9期
王 薇,羅云霞,蔡建平
(1.河北地質大學數理學院,石家莊 050031;2.浙江水利水電學院電氣工程學院,杭州 310018)
0 引言
船舶航向控制對船舶航行的安全性、可控性起著重要的作用,也影響到海洋運輸事業的經濟性。近些年來,隨著控制技術的不斷發展,越來越多的先進控制方法被應用于船舶航向控制,其中最具代表性的就是非線性控制方法的應用。這些先進方法的應用使得在線性系統模型中被忽略的船舶操縱運動的非線性因素,由航速、裝載帶來的非線性影響,以及由控制器的飽和非線性及非線性時滯帶來的影響[1-2]均可在系統控制器設計中被完全考慮。特別是自適應反步法的引入[3-6],使得船舶航向控制系統中的未知系統參數以及由航行中風、浪、流等帶來的外界干擾所引起的不確定性,均可通過自適應控制器的適應范圍更加廣泛,控制系統的精益參數估計的方法進行精確補償,從而使控度、性能也得到了較大的提高。
縱觀船舶航向控制的現有研究結果,均以連續控制信號輸入為基礎,即要求執行機構的輸出信號是連續信號。這雖然可使作用于系統的輸入更加精確,但由于控制信號自身的復雜性及執行機構的執行難度,使得執行效率大大降低,導致系統控制性能下降。本文從執行機構的實際要求及提高執行效率角度出發,提出了基于事件觸發的船舶航向自適應控制的設計方法。首先在船舶航向的Norbbin 非線性模型中充分考慮參數不確定性。然后以反步法為基礎,設計了控制器輸入信號及觸發事件,得到了基于事件觸發的自適應控制器。該控制器可對未知參數進行在線估計。最后通過實例仿真驗證了控制器的有效性。
1 系統描述
在船舶航向自動舵設計時,船舶操縱系統模型通常采用Nomoto 線性模型[7],但是Nomoto 方程是在小舵角和低頻舵動的情況下推導出來的,具有較大的局限性,而非線性模型又非常復雜,為了改善模型的描述精度,本文的船舶航向控制系統采用Norbbin 非線性模型[8]




假設干擾為與系統有關的非線性函數,即滿足如下假設:
控制目標為設計基于事件觸發機制的自適應控制器,使得船舶的航向角可以收斂到設定的航向角,同時保證所有的閉環系統信號有界。
2 控制器設計穩定性分析
本節將給出設計控制器的步驟,并給出閉環系統的穩定性分析。首先,對系統進行坐標變換

其中,α1代表控制器的虛擬輸入,其形式將在后面給出。對z1求導可得

取Lyapunov 方程

并令

其中,k1>0 為設計參數。則對Lyapunov 方程求導可得

對z2進行求導可得

接下來,給出一種基于相對閾值策略的事件觸發控制方案。具體設計的控制方案如下:
首先定義

相應的觸發事件設計為

給出如下定理及系統的穩定性證明,并且詳細證明了該控制方案可以避免事件觸發控制中的奇諾現象Zeno behavior[5]。

取Lyapunov 方程

計算可得

將式(20)和式(12)~式(13)帶入到式(19)可得



可得
注1:在觸發事件式(15)中,選取了一個動態變化的事件觸發閾值,因而當控制信號u 的幅值較大時,控制信號將會維持較長的時間保持不變;而當系統狀態趨向于平衡點時,控制信號也會較小,因而可以為系統提供精確的控制。
注2:事件觸發控制的難點在于如何補償由于事件觸發機制引入的測量誤差e。本文通過在控制器中引入tanh 函數,并且利用tanh 的性質補償測量誤差,避免了傳統控制方案中的輸入狀態穩定的假設條件。
3 仿真
與文獻[5]相同,為驗證本文所設計的基于事件觸發機制的船舶航向控制器的性能,考慮大連海事大學“育龍”號遠洋實習船,該船長126 m,船寬20.8 m,滿載吃水為0.618。
當該船以7.2 m/s 的速度航行時,方程中的船舶參數為:

仿真結果如圖1~圖3(168 頁)所示,其中圖1表明輪船的航向角可以快速收斂到設定值,圖2 給出了控制信號,圖3 給出了控制器任意兩次更新時的時間間隔。通過仿真結果可知,本文提出的控制方案可以保證航向角可以快速跟蹤設定值,并且信號控制信號更新的次數大大減少,系統的通信負擔大大減輕。這些都表明了本文提出的基于事件觸發控制機制控制器的有效性。
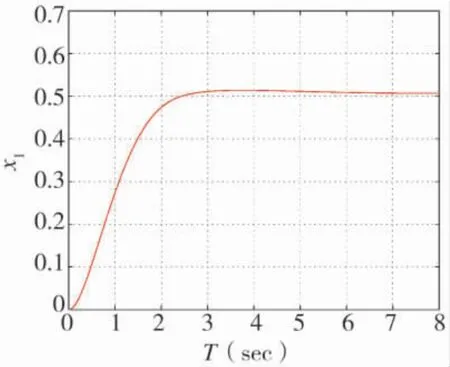
圖1 航向角
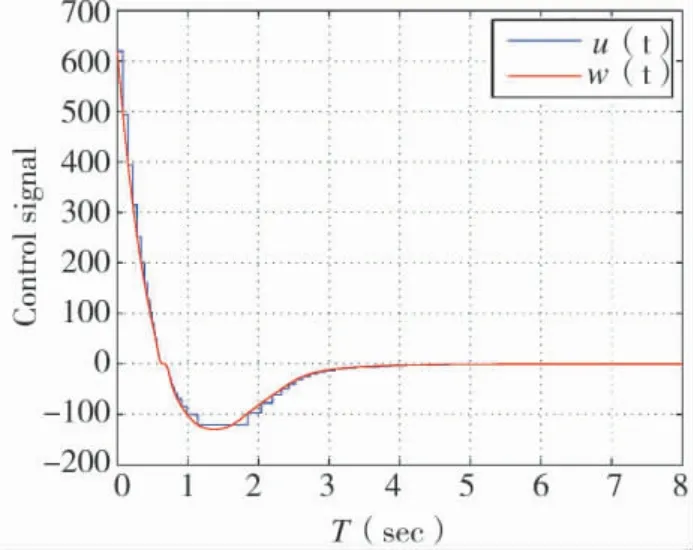
圖2 控制信號
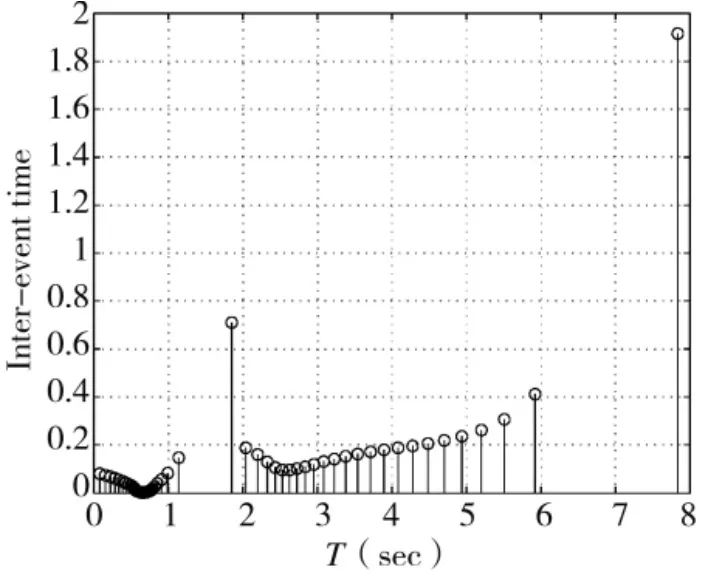
圖3 觸發間隔
4 結論
針對一類船舶航向控制系統,從實際情況出發,充分考慮系統具有未知的常數參數,基于反步法設計了事件觸發自適應控制器。該控制器不僅能保持系統穩定,同時實現了系統輸出對參考信號的快速精確跟蹤,提高了系統的性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
