克服“中國(guó)式過(guò)馬路”現(xiàn)象的交通信號(hào)控制
2019-11-05 02:51:44余秋婷熊俊俏
自動(dòng)化與儀表 2019年10期
余秋婷,熊俊俏
(武漢工程大學(xué) 電氣信息學(xué)院,武漢430205)
現(xiàn)如今,交通路口信號(hào)燈大部分采用固定配時(shí)方案,在行人高峰時(shí)難免會(huì)形成“中國(guó)式過(guò)馬路”現(xiàn)象[1],這樣極易發(fā)生交通事故。為了緩解行人和車(chē)輛通行之間的矛盾,從“以人為本”的角度,考慮一種自適應(yīng)控制的方法,通過(guò)檢測(cè)等候的行人數(shù)量和行人等候時(shí)間來(lái)實(shí)現(xiàn)信號(hào)相位的轉(zhuǎn)換,優(yōu)化交通時(shí)間配置,從而降低事故發(fā)生概率,提高交通資源的利用率。
目前,交通信號(hào)的控制方法主要有:①固定信號(hào)配時(shí),一般的交通路口設(shè)置紅燈時(shí)長(zhǎng)為30 s~90 s不等,據(jù)報(bào)道國(guó)人等待的忍耐限度僅為15 s,因此往往在行人高峰時(shí)段,就會(huì)出現(xiàn) “中國(guó)式過(guò)馬路”現(xiàn)象;②按鍵式中斷主路信號(hào)配時(shí),行人通過(guò)觸發(fā)按鈕發(fā)出過(guò)街信號(hào),信號(hào)相位轉(zhuǎn)換為行人通行信號(hào),這種方式提高了行人過(guò)街的安全性[2],但長(zhǎng)期使用會(huì)造成按鍵的損壞和系統(tǒng)響應(yīng)不及時(shí)等情況,不適用于繁忙的交通路口;③自適應(yīng)信號(hào)配時(shí),可通過(guò)微波雷達(dá)、紅外、激光、視頻等傳感器對(duì)行人進(jìn)行自動(dòng)檢測(cè)[3],根據(jù)行人的特性來(lái)進(jìn)行信號(hào)配時(shí),提高了交通資源的利用率。
微波雷達(dá)傳感器雖檢測(cè)精度不受天氣影響但一般不能檢測(cè)低速和靜止的目標(biāo),紅外傳感器可檢測(cè)靜止目標(biāo)但檢測(cè)精度易受環(huán)境影響,激光傳感器具有易于安裝、維護(hù)的優(yōu)點(diǎn)但當(dāng)行人相互重疊時(shí)檢測(cè)精度低。
由于視頻傳感器采集信息豐富、 直觀且安裝、維護(hù)方便,本文基于行人視頻檢測(cè)技術(shù)檢測(cè)行人數(shù)以及行人等待時(shí)間,設(shè)計(jì)了基于路口等待過(guò)街行人檢測(cè)的交通信號(hào)控制。利用背景差分法將攝像頭檢測(cè)到的視頻圖像信息進(jìn)行處理,依據(jù)過(guò)街行人數(shù)和等候時(shí)長(zhǎng)進(jìn)行交通信號(hào)配時(shí),并進(jìn)行了交通仿真與分析。
1 基于行人檢測(cè)的交通信號(hào)系統(tǒng)
基于行人檢測(cè)的交通信號(hào)系統(tǒng)由行人視頻采集、行人檢測(cè)算法和信號(hào)配時(shí)三部分組成。圖1所示為基于行人檢測(cè)的交通信號(hào)系統(tǒng)流程[4]。

圖1 基于行人檢測(cè)的交通信號(hào)系統(tǒng)流程Fig.1 Traffic signal system flow chart based on pedestrian detection
1.1 行人檢測(cè)算法
運(yùn)動(dòng)目標(biāo)檢測(cè)算法主要有幀間差分法、光流場(chǎng)法和背景差分法[5]。幀間差分法雖然實(shí)現(xiàn)簡(jiǎn)單,對(duì)場(chǎng)景不敏感,但檢測(cè)精度不高,不能提取完整區(qū)域。光流場(chǎng)法能夠完全提取動(dòng)態(tài)信息,攝像頭移動(dòng)時(shí)也能進(jìn)行檢測(cè),但計(jì)算復(fù)雜、耗時(shí),對(duì)光線(xiàn)和噪聲敏感。背景差分法檢測(cè)速度快,能實(shí)時(shí)檢測(cè)行人,在相對(duì)靜止的背景下檢測(cè)精度較高。因此本文采用背景差分的行人檢測(cè)算法。
行人檢測(cè)算法包括行人等候區(qū)背景建模、背景更新、行人目標(biāo)提取以及等候行人數(shù)和等候時(shí)長(zhǎng)。
1.1.1 行人等候區(qū)背景建模
為得到具有實(shí)時(shí)性和魯棒性的背景圖像,本文采用多幀平均的方法進(jìn)行背景建模,由于運(yùn)動(dòng)物體的灰度值與背景的灰度值之間存在著很大的差異,運(yùn)動(dòng)物體經(jīng)過(guò)像素點(diǎn)位置時(shí),就會(huì)引起該像素點(diǎn)位置的灰度值變化,因此可以通過(guò)計(jì)算一定時(shí)間段內(nèi)的像素的平均值來(lái)獲得背景圖像[6]。本文提取N 幀圖像進(jìn)行背景建模,N 的值越大或者說(shuō)累加的圖像幀數(shù)越多,背景圖像就越是接近真實(shí)。表達(dá)式為

式中:Bn為采集多幀圖像建立的平均背景;N 為幀數(shù);fi為每一幀圖像。
1.1.2 背景更新
外界光線(xiàn)的變化會(huì)對(duì)背景模型產(chǎn)生一定的影響,因此需要對(duì)背景模型進(jìn)行實(shí)時(shí)更新,來(lái)適應(yīng)場(chǎng)景的變化,使得檢測(cè)效果更好。對(duì)沒(méi)有前景目標(biāo)的像素點(diǎn)更新。更新的算式如下:

式中:Bn為新的背景值;Bn-1為前一幀的背景值。新的背景值可以通過(guò)前一幀背景值以及當(dāng)前圖像和第fN-K幀圖像遞推得到。
1.1.3 行人目標(biāo)提取
在實(shí)際應(yīng)用中,當(dāng)行人處于等待狀態(tài)時(shí),行人相對(duì)于背景來(lái)說(shuō)處于禁止或者緩慢運(yùn)動(dòng)狀態(tài)。本文采用背景差分法[7]。背景差分公式為

式中:fd(x,y)為差分圖像;fc(x,y)為當(dāng)前幀圖像;fb(x,y)為背景圖像。
行人檢測(cè)表示為

式中:T 為分割閾值,當(dāng)R(x,y)=0 時(shí),表示為行人,當(dāng)R(x,y)=1 時(shí),表示為背景。
1.1.4 等候行人數(shù)和等候時(shí)長(zhǎng)
行人在第t 幀的等候時(shí)長(zhǎng)可以表示為
式中:Dt(x,y)=Dt-1(x,y)+1 表示當(dāng)檢測(cè)到有行人而且上一幀行人等候時(shí)長(zhǎng)超過(guò)1 s 時(shí)的等候時(shí)長(zhǎng);Dt(x,y)=0 表示圖像為背景時(shí)的等候時(shí)長(zhǎng)。當(dāng)系統(tǒng)進(jìn)行初始化時(shí),令t=0,此時(shí)等待的行人數(shù)為0,等候時(shí)長(zhǎng)為0。
在第t 幀時(shí)的等候的行人數(shù)可以表示為

式中:#為像素的數(shù)目[8]。
1.2 信號(hào)配時(shí)
當(dāng)未檢測(cè)到行人時(shí),人行橫道信號(hào)燈則會(huì)一直保持紅燈狀態(tài),車(chē)行道則一直處于綠燈狀態(tài);根據(jù)等候的行人數(shù)和等待時(shí)長(zhǎng)來(lái)判斷,一旦檢測(cè)到有行人,且人數(shù)或者等待時(shí)長(zhǎng)大于一定值時(shí),則會(huì)開(kāi)啟人行橫道通行信號(hào)[9]。行人過(guò)街信號(hào)時(shí)間Gt可以用以下算式表示[10]:

式中:T 為行人反應(yīng)時(shí)間,一般取3.2 s;L 為人行橫道的長(zhǎng)度(m);Sp為行人的平均速度,一般取1.2 m/s;Nped為過(guò)街行人數(shù);W 為人行橫道的寬度(m)。
2 行人檢測(cè)算法驗(yàn)證
根據(jù)路面實(shí)際情況,本文所測(cè)試實(shí)際場(chǎng)景的斑馬線(xiàn)長(zhǎng)16 m,寬4 m,行人等候區(qū)的面積為12 m2,攝像頭置于行人等候區(qū)高4 m 處。根據(jù)等候行人數(shù)和等候時(shí)長(zhǎng),分別檢測(cè)等待行人數(shù)為2 人、7 人、21人、31 人時(shí),行人在等候區(qū)所占比例。由于拍攝時(shí)攝像頭不穩(wěn)定會(huì)導(dǎo)致拍攝角度產(chǎn)生偏差,這里選用3DS Max 軟件模擬真實(shí)場(chǎng)景。圖2為不同等待人數(shù)的場(chǎng)景圖。

圖2 不同等待人數(shù)場(chǎng)景圖Fig.2 Different waiting people scene map
行人占等候區(qū)的比例為檢測(cè)到的行人數(shù)所占面積與等候區(qū)的面積之比,理論上行人站立空間取0.06 m2。本文采用Matlab GUI 的可視化界面,將行人所占比例顯示在界面上。圖3為等待行人數(shù)為7人時(shí)的處理結(jié)果。

圖3 行人檢測(cè)處理結(jié)果Fig.3 Pedestrian detection processing result
可以得到不同等待人數(shù)所占等候區(qū)比例如表1所示。

表1 不同等待人數(shù)所占等候區(qū)比例Tab.1 Proportion of waiting areas for different waiting people
由表可以看出上述算法所得出的結(jié)果接近理論值,誤差范圍在5%以?xún)?nèi),驗(yàn)證了算法的有效性。
3 信號(hào)控制優(yōu)化仿真與分析
為了驗(yàn)證某干路路口的實(shí)際交通狀況,對(duì)該路口下午5:30~7:30 的交通數(shù)據(jù)進(jìn)行了調(diào)研,單向雙車(chē)道的車(chē)流為平均每小時(shí)2000 輛,過(guò)街人流量為平均每小時(shí)500 人。將調(diào)研的數(shù)據(jù)在VISSIM 軟件中進(jìn)行仿真,模擬無(wú)信號(hào)控制(行人過(guò)街車(chē)讓人)、固定配時(shí)信號(hào)控制以及本系統(tǒng)的信號(hào)控制,將這3種情況作比較并加以分析。
其中固定配時(shí)信號(hào)控制周期時(shí)長(zhǎng)為100 s,車(chē)流方向綠燈時(shí)長(zhǎng)為57 s,黃燈3 s,紅燈為40 s,行人方向綠燈時(shí)長(zhǎng)為40 s,紅燈為60 s。車(chē)輛方向仿真結(jié)果如表2所示,行人方向仿真結(jié)果如表3所示。
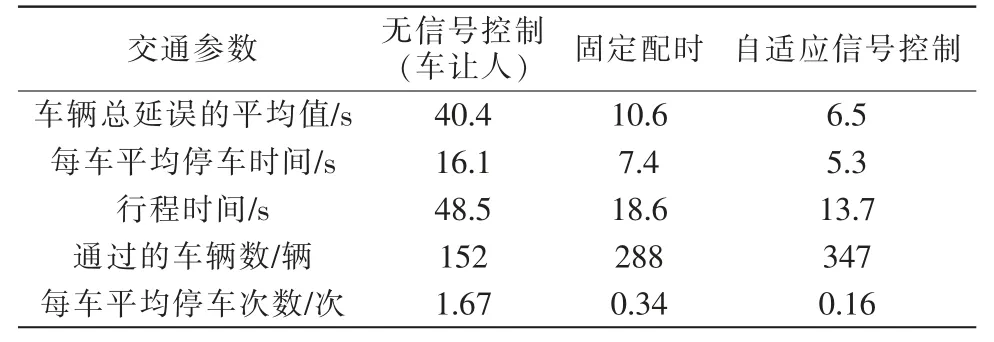
表2 車(chē)輛方向仿真結(jié)果Tab.2 Vehicle direction simulation results

表3 行人方向仿真結(jié)果Tab.3 Pedestrian direction simulation results
從表2和表3中可以看出,無(wú)信號(hào)控制的路口不會(huì)對(duì)行人產(chǎn)生延誤,但車(chē)輛的平均延誤為40.4 s,行程時(shí)長(zhǎng)為48.5 s;固定配時(shí)路口以車(chē)流為主,車(chē)輛的平均延誤時(shí)間減少到了10.6 s,行程時(shí)間也減少了,為18.6 s,但行人的平均延誤增高了,為16.3 s,平均等待時(shí)間也相對(duì)變長(zhǎng)了,這就可能會(huì)出現(xiàn)行人闖紅燈的情況,易造成交通事故;自適應(yīng)信號(hào)控制路口車(chē)輛的延誤時(shí)間減少到了6.5 s,行人的延誤時(shí)間減少到9.2 s,可見(jiàn)自適應(yīng)信號(hào)控制能減少車(chē)車(chē)輛和行人的延誤,使交通路口更加暢通,也較少了交通事故的發(fā)生。
4 結(jié)語(yǔ)
經(jīng)過(guò)實(shí)地調(diào)查和仿真分析,本文取得了如下進(jìn)展:①通過(guò)背景差分法提取出前景行人目標(biāo),并運(yùn)用Matlab 對(duì)算法進(jìn)行驗(yàn)證;②通過(guò)VISSIM 仿真軟件結(jié)合實(shí)地調(diào)查的數(shù)據(jù)進(jìn)行模擬仿真,將無(wú)信號(hào)控制、固定配時(shí)信號(hào)控制、本系統(tǒng)信號(hào)控制進(jìn)行對(duì)比,本文提出的自適應(yīng)信號(hào)控制相對(duì)優(yōu)化了行人和車(chē)輛的通行時(shí)間。本文目前只針對(duì)“中國(guó)式過(guò)馬路”現(xiàn)象提出了改進(jìn),還需進(jìn)一步研究車(chē)輛方面問(wèn)題,這樣可以更好地對(duì)時(shí)間進(jìn)行分配,取得更佳的效果。
猜你喜歡
汽車(chē)工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12