結(jié)合全卷積網(wǎng)絡(luò)和K均值聚類的球柵陣列焊球邊緣氣泡分割
2019-10-31 09:21:33趙瑞祥侯宏花張鵬程劉祎田珠桂志國(guó)
計(jì)算機(jī)應(yīng)用 2019年9期
趙瑞祥 侯宏花 張鵬程 劉祎 田珠 桂志國(guó)


摘 要:針對(duì)在球柵陣列(BGA)氣泡檢測(cè)中,由于圖像干擾因素的多樣性導(dǎo)致焊球存在邊緣氣泡與背景之間灰度級(jí)接近,從而造成焊球氣泡分割結(jié)果不精確的問(wèn)題,提出了一種結(jié)合全卷積神經(jīng)網(wǎng)絡(luò)(FCN)和K均值(K-means)聚類分割的焊球氣泡分割方法。首先根據(jù)所制作的BGA標(biāo)簽數(shù)據(jù)集搭建FCN,通過(guò)訓(xùn)練該網(wǎng)絡(luò)得到合適的網(wǎng)絡(luò)模型,再對(duì)待測(cè)BGA圖像進(jìn)行預(yù)測(cè)處理得到圖像的粗分割結(jié)果;然后對(duì)焊球區(qū)域映射提取,通過(guò)同態(tài)濾波法提高氣泡區(qū)域辨識(shí)度,再使用K-means聚類分割對(duì)圖像進(jìn)行細(xì)分割處理,得到最終分割結(jié)果圖;最后對(duì)原圖焊球及氣泡區(qū)域進(jìn)行標(biāo)注識(shí)別。將所提出的算法與傳統(tǒng)BGA氣泡分割算法進(jìn)行對(duì)比,實(shí)驗(yàn)結(jié)果表明,所提出的算法對(duì)復(fù)雜BGA焊球的邊緣氣泡分割精確,圖像分割結(jié)果與其真實(shí)輪廓高度匹配,準(zhǔn)確度更高。
關(guān)鍵詞:全卷積網(wǎng)絡(luò);K均值聚類;球柵陣列;邊緣氣泡;缺陷分割
中圖分類號(hào):TP391.7
文獻(xiàn)標(biāo)志碼:A
Welding ball edge bubble segmentation for ball grid array based on full convolutional network and K-means clustering
ZHAO Ruixiang1,2, HOU Honghua1,2, ZHANG Pengcheng1,2, LIU Yi1,2, TIAN Zhu1,2, GUI Zhiguo1,2*
1.School of Information and Communication Engineering, North University of China, Taiyuan Shanxi 030051, China;
2.Shanxi Provincial Key Laboratory for Biomedical Imaging and Big Data (North University of China), Taiyuan Shanxi 030051, China
Abstract:
For inaccurate segmentation results caused by the existence of edge bubbles in welding balls and the grayscale approximation of background due to the diversity of image interference factors in Ball Grid Array (BGA) bubble detection, a welding ball bubble segmentation method based on Fully Convolutional Network (FCN) and K-means clustering was proposed. Firstly, a FCN network was constructed based on the BGA label dataset, and trained to obtain an appropriate network model, and then the rough segmentation result of the image were obtained by predicting and processing the BGA image to be detected. Secondly, the welding ball region mapping was extracted, the bubble region identification was improved by homomorphic filtering method, and then the image was subdivided by K-means clustering segmentation to obtain the final segmentation result. Finally, the welding balls and bubble region in the original image were labeled and identified. Comparing the proposed algorithm with the traditional BGA bubble segmentation algorithm, the experimental results show that the proposed algorithm can segment the edge bubbles of complex BGA welding balls accurately, and the image segmentation results highly match the true contour with higher accuracy.
Key words:
Full Convolutional Network (FCN); K-means clustering; Ball Grid Array (BGA); edge bubble; defect segmentation
0 引言
球柵陣列(Ball Grid Array, BGA)是近幾年發(fā)展十分迅速的一種電子器件封裝技術(shù)[1]。而BGA焊球內(nèi)存在氣泡是一種普遍并且難以避免的現(xiàn)象,焊球氣泡是錫膏中焊劑殘留和焊接面雜質(zhì)在焊球融化時(shí)未及時(shí)排除而存儲(chǔ)于其中形成的[2-3]。氣泡過(guò)大不僅會(huì)導(dǎo)致焊球強(qiáng)度的降低,還會(huì)使得錫球體積變大,加大短路的幾率,即使不形成短路等缺陷,也可能影響電氣連接,造成工業(yè)上的損失[3]。
目前X射線BGA空洞缺陷的檢測(cè)標(biāo)準(zhǔn)參照IPC-7095C發(fā)布的《BGA的設(shè)計(jì)及組裝工藝的實(shí)施》的標(biāo)準(zhǔn)來(lái)判別。具體規(guī)定為BGA焊球中氣泡的總面積不能超過(guò)焊球總面積的20%,單個(gè)氣泡的面積不能超過(guò)焊球面積的25%[4]。在傳統(tǒng)的BGA空洞缺陷檢測(cè)中,人工檢測(cè)依然是封裝檢測(cè)行業(yè)內(nèi)普遍使用的一種方式[5],檢測(cè)人員根據(jù)自身的視覺(jué)觀察對(duì)產(chǎn)品封裝的缺陷進(jìn)行評(píng)估判定,但在長(zhǎng)時(shí)間的檢測(cè)過(guò)程中也會(huì)因?yàn)槠诤妥⒁饬ο陆刀鴮?dǎo)致缺陷判定出現(xiàn)錯(cuò)誤,所以,BGA空洞缺陷的自動(dòng)檢測(cè)與評(píng)估系統(tǒng)的開發(fā)對(duì)于工業(yè)生產(chǎn)有重要的意義。BGA檢測(cè)的主要目的在于將BGA射線圖像中的焊球區(qū)域和焊球內(nèi)部氣泡區(qū)域自動(dòng)進(jìn)行分析提取并計(jì)算出單個(gè)焊球內(nèi)部氣泡占比度的大小,直接判定出焊球的合格情況。減少操作員的工作量,更有利于檢測(cè)不合格焊球,減少工業(yè)損失,提高產(chǎn)品質(zhì)量和生產(chǎn)效率。那么,在系統(tǒng)的自動(dòng)檢測(cè)算法中焊球及焊球內(nèi)部氣泡的完整提取就尤為重要。
近年來(lái),針對(duì)BGA焊球及其內(nèi)部氣泡的分割提取算法,主要集中于基于全局閾值分割[6]、基于偏微分方程[7]、基于BLOB(Binary Large OBject)濾波[8]、基于射線檢測(cè)[9]和基于直方圖分析[10]等方法。但是由于BGA圖像的干擾因素多樣,這些方法在精確分割焊球邊緣氣泡缺陷方面具有局限性。例如,張俊生等[11]提出了一種首先采用OTSU自適應(yīng)分割算法來(lái)提取焊球區(qū)域,然后用數(shù)學(xué)形態(tài)學(xué)開閉運(yùn)算和頂帽變換來(lái)提取焊球的氣泡區(qū)域的方法。該算法根據(jù)整幅BGA射線圖像的灰度特性,計(jì)算前景和背景之間的類間方差,得出使得類間方差值最大的合適閾值來(lái)分割出焊球區(qū)域。然而,在圖像復(fù)雜度高的情況下,比如有邊界干擾、殘缺焊球、邊緣氣泡對(duì)比度低的情況下,該算法就無(wú)法準(zhǔn)確地分割出完整的焊球,使得后續(xù)計(jì)算焊球內(nèi)部氣泡占比率出現(xiàn)誤差,造成過(guò)分割和欠分割的情況。
針對(duì)目前部分方法在對(duì)復(fù)雜背景干擾下的BGA圖像分割中,由于部分焊球存在邊緣氣泡像素級(jí)與背景像素級(jí)之間的分辨率差,導(dǎo)致分割結(jié)果出現(xiàn)過(guò)分割的問(wèn)題,本文提出了一種結(jié)合全卷積神經(jīng)網(wǎng)絡(luò)(Fully Convolutional Network, FCN)[12]和基于同態(tài)濾波的K-means聚類分割[13]的焊球氣泡分割算法。首先,構(gòu)建符合BGA圖像數(shù)據(jù)集特點(diǎn)的FCN,通過(guò)對(duì)BGA焊球圖像進(jìn)行像素級(jí)的分類,以焊球中每個(gè)像素的類別作為監(jiān)督信息,使用多層網(wǎng)絡(luò)在訓(xùn)練過(guò)程中自主學(xué)習(xí)圖像多層次特征來(lái)獲取焊球的感興趣區(qū)域(Region Of Interest, ROI)區(qū)域分割結(jié)果,使得BGA圖像中復(fù)雜背景像素級(jí)的干擾完全去除,從而快速完整地提取出目標(biāo)焊球區(qū)域;然后采用同態(tài)濾波算法提高焊球內(nèi)部氣泡辨識(shí)度,再使用K-means聚類分割算法將焊球與氣泡區(qū)域分別聚成不同的簇,使焊球內(nèi)部氣泡被分割提取出來(lái);最后對(duì)原圖焊球及內(nèi)部氣泡區(qū)域進(jìn)行標(biāo)記識(shí)別。
1 FCN與K-means聚類分割
1.1 FCN
卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network, CNN)一般由輸入層、卷積層、激活層、池化層和全連接層組成,輸入為圖像的像素值,卷積層配合池化層,從低層到高層,隨著感受野的擴(kuò)充,完成低級(jí)特征到高級(jí)特征的提取,在全連接層得到固定長(zhǎng)度的特征向量來(lái)進(jìn)行分類,將最終得到的前向傳播運(yùn)算結(jié)果傳遞到損失層,損失層以真實(shí)類別作為監(jiān)督信息,以最小化分類誤差為目標(biāo),通過(guò)反向傳播來(lái)調(diào)整網(wǎng)絡(luò)各層的權(quán)值,完成模型的訓(xùn)練[14]。
FCN是由UC Berkeley的Jonathan Long等提出來(lái)的,結(jié)構(gòu)與經(jīng)典的CNN基本相同,但是FCN將CNN中的全連接層全部替換為卷積層,通過(guò)對(duì)圖像進(jìn)行像素級(jí)的分類,從抽象的特征中恢復(fù)出每個(gè)像素所屬的類別,從圖像級(jí)別的分類進(jìn)一步延伸到像素級(jí)別的分類,實(shí)現(xiàn)的是像素級(jí)的識(shí)別,對(duì)輸入圖像的每一個(gè)像素在輸出上都有對(duì)應(yīng)的判斷標(biāo)注,標(biāo)明這個(gè)像素最可能是屬于一個(gè)什么類別或物體,從而解決語(yǔ)義級(jí)別的圖像分割問(wèn)題。
相對(duì)于經(jīng)典的CNN而言,F(xiàn)CN可以接受任意尺寸的二維輸入圖像,經(jīng)過(guò)反卷積操作,對(duì)最后一個(gè)卷積層的輸出特征圖進(jìn)行上采樣,使特征圖恢復(fù)到與原始圖像相同的尺寸,保留原始輸入圖像的空間信息;然后逐像素經(jīng)過(guò)Softmax層計(jì)算處理,對(duì)輸入圖像中每一個(gè)像素進(jìn)行預(yù)測(cè),形成pixel-to-pixel的監(jiān)督。與卷積神經(jīng)網(wǎng)絡(luò)(CNN)相比,F(xiàn)CN的優(yōu)點(diǎn)在于接受輸入圖像尺寸不一;并且解決了CNN存在的存儲(chǔ)開銷大、計(jì)算效率低下、感知區(qū)域受限等問(wèn)題。
1.2 K-means聚類分割
K-means聚類算法是圖像劃分方法中較經(jīng)典的聚類算法之一。其基本思想是將選取的M個(gè)種子點(diǎn)特征和其周圍點(diǎn)的特征進(jìn)行距離的測(cè)定,將圖像樣本聚成不同的簇,使得簇內(nèi)具有較高的相似度,而簇間的相似度較低,以得到緊湊且獨(dú)立的簇作為最終的聚類目標(biāo)。
針對(duì)于BGA圖像來(lái)說(shuō),圖像中所有位置的像素值可以表示為一組數(shù)據(jù){x1,x2,…,xn},K-means聚類的任務(wù)就是將這些數(shù)據(jù)聚成K個(gè)簇,將背景、焊球、氣泡單獨(dú)分割出來(lái)。本文引入二值變量rnk∈{0,1}來(lái)表示像素?cái)?shù)據(jù)點(diǎn)xn對(duì)于聚類簇k的歸屬情況(n=1,2,…,N, k=1,2,…,K),如果數(shù)據(jù)點(diǎn)xn屬于第k聚類,就將rnk值定為1,否則為0。根據(jù)此情況,定義損失函數(shù)J為:
J=∑Nn=1∑Kk=1rnk‖xn-μk‖2(1)
J函數(shù)表示每個(gè)像素點(diǎn)到其所選聚類中心μk的距離平方和,則聚類分割的問(wèn)題就轉(zhuǎn)移到尋找使得損失函數(shù)J最小的像素?cái)?shù)據(jù)點(diǎn)的歸屬值rnk和聚類中心μk。K-means算法通過(guò)一種迭代求解方法在每次的迭代優(yōu)化中求得最佳rnk和μk。具體步驟如下:
步驟1 求取可以使損失函數(shù)J最小的數(shù)據(jù)點(diǎn)的歸屬值rnk。由式(1)可以看出,損失函數(shù)J是rnk的線性函數(shù),給定xn和μk的值,并且xn之間相互獨(dú)立,則對(duì)于每一個(gè)像素n,只需將該像素分配到距離最近的聚類中心,即:
rnk=1, k=arg minj‖xn-μj‖2
0,其他(2)
步驟2 根據(jù)已求得的rnk,再求取使得損失函數(shù)J最小的聚類中心μk。損失函數(shù)J是μk的二次函數(shù),令J對(duì)μk的導(dǎo)數(shù)為0,可以得:
∑Nn=1rnk(xn-μk)=0(3)
則可以得出μk的取值為:
μk=(∑Nn=1rnkxn)/∑Nn=1rnk(4)
對(duì)于第k個(gè)聚類,rnk取1的個(gè)數(shù)就是屬于該聚類的點(diǎn)的個(gè)數(shù),因此μk屬于該聚類的點(diǎn)均值。重復(fù)迭代上述兩步驟直至收斂。
2 本文算法
2.1 算法流程
為了精確地分割出焊球中的氣泡區(qū)域,本文結(jié)合了全卷積神經(jīng)網(wǎng)絡(luò)(FCN)和K-means聚類分割方法。FCN絡(luò)通過(guò)深層卷積學(xué)習(xí)特征,來(lái)判定BGA焊球圖像中的像素所屬類別,可以粗略地分割出目的焊球區(qū)域;K-means聚類分割則在FCN分割基礎(chǔ)上進(jìn)一步精確分割出焊球氣泡區(qū)域。
本文提出的算法主要包含兩個(gè)階段:粗分割階段和細(xì)分割階段。算法具體步驟如下:
1)粗分割階段。
①在訓(xùn)練階段首先搭建FCN訓(xùn)練環(huán)境,根據(jù)所制作的BGA數(shù)據(jù)集搭建好FCN;
②通過(guò)訓(xùn)練該網(wǎng)絡(luò)得到適用于分割BGA焊球的網(wǎng)絡(luò)模型;
③在測(cè)試階段將待測(cè)圖像經(jīng)由該網(wǎng)絡(luò)模型得到BGA圖像的粗分割結(jié)果并優(yōu)化。
2)細(xì)分割階段。
①首先對(duì)優(yōu)化后的BGA粗分割結(jié)果圖進(jìn)行輪廓提取和原圖映射操作,并將所提輪廓附加映射圖用來(lái)增強(qiáng)焊球的邊緣;
②用同態(tài)濾波算法提高所提取出的焊球區(qū)域氣泡辨識(shí)度;
③再采用K-means聚類分割方法對(duì)增強(qiáng)圖像進(jìn)行分割處理并優(yōu)化,得到最終分割圖后對(duì)原圖焊球及氣泡區(qū)域進(jìn)行標(biāo)記識(shí)別,得到最終標(biāo)記效果圖。
2.2 粗分割階段
根據(jù)所制作的BGA標(biāo)簽數(shù)據(jù)集的特點(diǎn)搭建合適的FCN全卷積網(wǎng)絡(luò),為了可以在保證特征提取效果的同時(shí)減少參數(shù)數(shù)量,使計(jì)算代價(jià)更小、收斂速度更快,所以網(wǎng)絡(luò)全部采用3×3的卷積核來(lái)進(jìn)行網(wǎng)絡(luò)層卷積操作。而VGG[15]的所有結(jié)構(gòu)都可以近似為3×3卷積核CNN的一個(gè)遍歷,并且在所有VGG11-19層的結(jié)構(gòu)中,網(wǎng)絡(luò)深度的增加會(huì)使得訓(xùn)練過(guò)程中特征提取得更精確,圖像top-1和top-5錯(cuò)誤率下降得也更明顯(top-N錯(cuò)誤率是指圖像識(shí)別算法給出的前N個(gè)答案中有一個(gè)是錯(cuò)誤的概率),所以本文所搭建的FCN采用VGG19基礎(chǔ)網(wǎng)絡(luò)模型。由于BGA射線圖像大小不一,單個(gè)焊球包含像素大小的分布范圍大,所以本文搭建的FCN保留全部的網(wǎng)絡(luò)層結(jié)構(gòu),即在經(jīng)典的VGG19的基礎(chǔ)上,把VGG19網(wǎng)絡(luò)最后的3層全連接層全部去掉,換成3個(gè)卷積層,保留原始圖像的空間特征。
本文最終所搭建的FCN結(jié)構(gòu)如圖1所示,圖1網(wǎng)絡(luò)層中不同的顏色代表不同的操作,操作模塊分為卷積、池化、反卷積、裁剪和融合這5部分。
網(wǎng)絡(luò)對(duì)輸入圖像尺寸沒(méi)有要求,通過(guò)輸入圖像和標(biāo)簽數(shù)據(jù),最終也得到預(yù)測(cè)圖像的二維數(shù)據(jù),且大小與輸入圖像大小相同,實(shí)現(xiàn)語(yǔ)義分割的目的。經(jīng)由FCN初始網(wǎng)絡(luò)多次卷積和池化以后,輸出的圖像會(huì)變得越來(lái)越小,分辨率也變得越來(lái)越低,會(huì)得到一個(gè)粗略的圖像,為了將這個(gè)分辨率低的粗略圖像恢復(fù)到原始的分辨率,需要對(duì)卷積池化后圖像進(jìn)行上采樣操作。本文所搭建的FCN中BGA圖像經(jīng)過(guò)5次組卷積和池化以后,圖像的分辨率依次縮小至原來(lái)的1/2、1/4、1/8、1/16和1/32,則對(duì)于最后輸出的圖像,就需要進(jìn)行32倍的上采樣,來(lái)恢復(fù)到和原圖一樣的大小。由于直接對(duì)第5層卷積池化后結(jié)果進(jìn)行32倍的上采樣會(huì)導(dǎo)致圖像細(xì)節(jié)大量丟失,分割結(jié)果不精確,所以本文采用融合方法,每一次的融合操作都是對(duì)反卷積結(jié)果進(jìn)行補(bǔ)充細(xì)節(jié)特征的過(guò)程:首先對(duì)第5次卷積池化輸出結(jié)果圖像進(jìn)行2倍反卷積操作,再將其與第4次池化卷積結(jié)果相融合,再對(duì)所得結(jié)果進(jìn)行2倍反卷積操作后與第3次卷積池化結(jié)果相融合,然后對(duì)所得結(jié)果直接進(jìn)行8倍反卷積操作,這樣得到的結(jié)果圖像與原始輸入圖像尺寸相同,并且兩次的融合操作所提取的圖像細(xì)節(jié)特征,已經(jīng)滿足了焊球區(qū)域分割精度的需求。
通過(guò)訓(xùn)練上述全卷積網(wǎng)絡(luò)得到適合分割焊球的BGA網(wǎng)絡(luò)模型,再對(duì)待測(cè)圖像進(jìn)行預(yù)測(cè)分割,得到的預(yù)測(cè)分割圖像分為焊球區(qū)域和背景區(qū)域兩部分,由于本次實(shí)驗(yàn)對(duì)殘缺焊球不考慮識(shí)別,所以通過(guò)計(jì)算焊球區(qū)域面積均值法將殘缺焊球區(qū)域剔除;由于原圖焊球拖尾的影響使得粗分割出來(lái)的拖尾焊球區(qū)域有微小雜點(diǎn)干擾,本文采用數(shù)學(xué)形態(tài)學(xué)開運(yùn)算方法進(jìn)行去除,得到最終焊球圖像區(qū)域,為細(xì)分割階段打下基礎(chǔ)。
2.3 細(xì)分割階段
細(xì)分割階段主要采用了K-means聚類分割算法對(duì)所提取出的焊球圖像進(jìn)行分割操作。為了在保證氣泡分割準(zhǔn)確性的同時(shí)減少聚類操作的運(yùn)行時(shí)間,本文經(jīng)過(guò)多次實(shí)驗(yàn)最終確定K-means聚類參數(shù)中聚類個(gè)數(shù)K設(shè)為4,迭代次數(shù)設(shè)為3,精度設(shè)為1.0;聚類初始中心的選取方式采用K-means++中心初始化算法選取(KMEANS_PP_CENTERS);聚類的特征選取方式為計(jì)算樣本與聚類中心之間的歐氏距離,距離越近,相似性越大;迭代終止的條件為達(dá)到最大迭代次數(shù)或者達(dá)到所選精度值(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS)。
圖2表示了細(xì)分割階段的主要過(guò)程,首先對(duì)FCN的粗分割結(jié)果圖2(a)進(jìn)行輪廓提取和原圖映射操作,再將所提輪廓附加映射圖用來(lái)增強(qiáng)焊球的邊緣,得到圖2(b),這樣就將各個(gè)焊球從BGA原始射線圖像中完整地提取出來(lái),為后面氣泡缺陷的提取分割去除了背景雜點(diǎn)、殘缺焊球和焊球拖尾等因素的干擾;然后再采用同態(tài)濾波法增強(qiáng)圖2(b)中氣泡區(qū)域辨識(shí)度,使用K-means聚類分割算法對(duì)增強(qiáng)后圖2(b)中的焊球、氣泡和背景區(qū)域分別進(jìn)行聚類操作,得到初始聚類分割圖2(c);最后對(duì)聚類分割圖進(jìn)行二值化處理,得到最終分割圖像。
圖3表示了對(duì)K-means聚類分割圖像后處理的優(yōu)化步驟,因?yàn)橹谱鰾GA數(shù)據(jù)集時(shí)Label標(biāo)簽是圍繞焊球周圍來(lái)標(biāo)注,所以二值化后的初始分割圖像會(huì)出現(xiàn)焊球邊界與輪廓之間有微小空隙存在。以單個(gè)焊球?yàn)槔疚牟捎脭?shù)學(xué)形態(tài)學(xué)膨脹腐蝕操作對(duì)其進(jìn)行優(yōu)化,得到焊球a;雖去除了空隙但也使得焊球中部分氣泡缺陷分割點(diǎn)也被去除,所以采用對(duì)原始焊球
去除輪廓后進(jìn)行區(qū)域生長(zhǎng)操作,將內(nèi)部氣泡區(qū)域單獨(dú)提取出來(lái),得到焊球b;最后將焊球a與焊球b相加,得到最終的焊球氣泡分割圖像。
2.4 標(biāo)記
根據(jù)最終分割結(jié)果圖像對(duì)BGA焊球氣泡缺陷進(jìn)行標(biāo)記,紅色輪廓標(biāo)記焊球區(qū)域,綠色部分覆蓋焊球內(nèi)部氣泡區(qū)域,并且計(jì)算出焊球內(nèi)部氣泡缺陷與焊球之間的占比大小,在當(dāng)前焊球左上角進(jìn)行標(biāo)注,標(biāo)記結(jié)果如圖4所示,可以非常直觀地看出當(dāng)前BGA射線圖像中各個(gè)焊球的合格情況。
3 數(shù)據(jù)集及其預(yù)處理
3.1 數(shù)據(jù)集
本文搭建的FCN網(wǎng)絡(luò)所采用的數(shù)據(jù)集是由自己標(biāo)注BGA數(shù)據(jù)圖像所得,可用的圖像有612張BGA射線圖像,包含上萬(wàn)個(gè)焊球樣本。訓(xùn)練集圖像格式保存為.jpg格式,位深度為24位,對(duì)應(yīng)的標(biāo)簽圖像保存為.png格式,位深度為8位。BGA數(shù)據(jù)集中的圖像平均尺寸是860×680。在所有圖像的長(zhǎng)寬中,最大的圖像大小為1600×1200,最小的為200×200,變化范圍很大。
3.2 標(biāo)簽制作
對(duì)于FCN的數(shù)據(jù)集標(biāo)簽而言,本文制作標(biāo)簽使用的工具是Labelme軟件,Labelme是一個(gè)開源的圖像輔助工具,能夠幫助用戶創(chuàng)建定制化標(biāo)注任務(wù)或可執(zhí)行圖像標(biāo)注[16]。對(duì)BGA圖像中合適的焊球使用連續(xù)的點(diǎn)圍繞其外圍進(jìn)行提取標(biāo)注,并賦值為0,因?yàn)闊o(wú)法確定殘缺焊球內(nèi)部氣泡總面積,所以對(duì)殘缺焊球不進(jìn)行標(biāo)注;元器件或者線盤區(qū)域不進(jìn)行標(biāo)注;拖尾區(qū)域不進(jìn)行標(biāo)注;橋接焊球?qū)⑵浞珠_進(jìn)行標(biāo)注,其他區(qū)域?yàn)楸尘啊?/p>
3.3 數(shù)據(jù)增強(qiáng)
由于BGA圖像中被干擾焊球相對(duì)正常焊球來(lái)說(shuō),數(shù)量較少,這就使得在FCN訓(xùn)練階段,參與訓(xùn)練的特殊焊球數(shù)量太少,導(dǎo)致結(jié)果精確度下降,本文通過(guò)增強(qiáng)訓(xùn)練集中被干擾焊球圖像的方法,來(lái)平衡訓(xùn)練集中被干擾焊球與正常焊球的占比。
對(duì)于訓(xùn)練集中的干擾焊球圖像,增強(qiáng)的倍數(shù)應(yīng)當(dāng)至少使得正常和受干擾焊球兩類焊球像素?cái)?shù)量基本相當(dāng),同時(shí)也要防止因增強(qiáng)倍數(shù)太大導(dǎo)致的模型過(guò)擬合,因此,將受干擾焊球的增強(qiáng)倍數(shù)設(shè)置為3,因?yàn)橐_保圖像中焊球大小格局變化不大,因此采取隨機(jī)水平或垂直翻轉(zhuǎn),幅度為0.01的隨機(jī)平移抖動(dòng)的方法組合來(lái)進(jìn)行增強(qiáng)數(shù)據(jù)集。
4 實(shí)驗(yàn)及結(jié)果分析
4.1 評(píng)估方法
對(duì)于焊球氣泡缺陷分割結(jié)果的評(píng)估,焊球內(nèi)部氣泡缺陷的檢測(cè)方法是計(jì)算氣泡區(qū)域占焊球區(qū)域面積的百分比,通常定為單個(gè)空洞缺陷所占面積不超過(guò)焊球面積的 25%、多個(gè)空洞缺陷面積總和不超過(guò)焊球面積的20% 就算焊接質(zhì)量合格。所以本文設(shè)定:氣泡面積用Svoid表示、焊球的面積用Sbga表示,焊球氣泡占比率用R表示,公式為:
R=SvoidSbga×100%(5)
4.2 結(jié)果與分析
4.2.1 FCN結(jié)果與分析
所搭建的FCN使用預(yù)訓(xùn)練模型來(lái)提高訓(xùn)練速度和減少過(guò)擬合的情況,即在ImageNet數(shù)據(jù)集中的VGG19基礎(chǔ)網(wǎng)絡(luò)模型上進(jìn)行微調(diào)。為了防止訓(xùn)練深度全卷積網(wǎng)絡(luò)模型出現(xiàn)梯度爆炸而造成Loss值為NAN的情況和防止全卷積網(wǎng)絡(luò)在求解時(shí)可能發(fā)生的過(guò)擬合現(xiàn)象,本文將batch size設(shè)置為2,學(xué)習(xí)率設(shè)置為10-4,將訓(xùn)練次數(shù)定為104。圖5顯示了FCN訓(xùn)練時(shí)隨著迭代次數(shù)的增加,損失函數(shù)的變化過(guò)程,由于使用了預(yù)訓(xùn)練模型,網(wǎng)絡(luò)在訓(xùn)練初期損失函數(shù)下降的很快,在迭代8000次后,損失函數(shù)趨于穩(wěn)定,最后迭代終止誤差收斂于0.003左右。
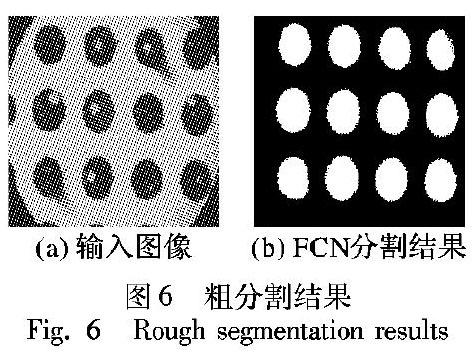
FCN的輸出類別包括背景和焊球這兩大類,得到的是包含焊球區(qū)域和背景區(qū)域的預(yù)測(cè)圖像,如圖6所示。FCN對(duì)輸入圖像圖6(a)進(jìn)行預(yù)測(cè)分割,并輸出粗分割結(jié)果圖6(b),可以看出圖6(b)很好地去除了背景復(fù)雜因素的干擾從而完整地提取出了目的焊球區(qū)域,為算法細(xì)分割階段打下基礎(chǔ)。
4.2.2 本文算法分析
將本文算法實(shí)驗(yàn)最終分割結(jié)果與其他文獻(xiàn)[11,17-18]所采用的方法進(jìn)行對(duì)比。文獻(xiàn)[11]是張俊生等于2018年提出的基于OTSU自適應(yīng)分割和結(jié)合數(shù)學(xué)形態(tài)學(xué)頂帽操作的分割方法,分割結(jié)果如圖7(b)所示;文獻(xiàn)[17]主要提出一種動(dòng)態(tài)閾值分割算法,通過(guò)控制圖像的平滑程度和差圖像閾值的大小,分別提取焊球區(qū)域和氣泡區(qū)域,二者相與后實(shí)現(xiàn)氣泡缺陷的最終分割,分割結(jié)果如圖7(c)所示;文獻(xiàn)[18]是將模糊C均值聚類圖像分割算法與基于邊緣檢測(cè)的圖像分割算法相結(jié)合,分割結(jié)果如圖7(d)所示。氣泡檢測(cè)方法采用上述評(píng)估方法進(jìn)行評(píng)估,評(píng)估結(jié)果如表1所示。
從表1中焊球3號(hào)和6號(hào)的分割情況和數(shù)據(jù)可以看出,其他三種文獻(xiàn)所提出的算法在針對(duì)焊球邊緣氣泡像素級(jí)與背景像素對(duì)比度差的情況下,會(huì)將邊緣氣泡當(dāng)作背景而分割出去,造成處理的過(guò)分割情況,使得氣泡所占比例和本文算法有2倍左右的誤差;從焊球2號(hào)和8號(hào)的分割情況和處理數(shù)據(jù)
可以看出,文獻(xiàn)[11]和文獻(xiàn)[17]中的算法無(wú)法對(duì)拖尾焊球作出正確的分割,將拖尾的陰影也分割到了焊球部分,使得焊球面積增加,氣泡率下降,造成了數(shù)據(jù)的錯(cuò)誤;從其他焊球數(shù)據(jù)可以看出對(duì)于焊球內(nèi)部像素對(duì)比度低的氣泡,文獻(xiàn)[18]分割
效果不足,本文算法和文獻(xiàn)[11]、文獻(xiàn)[17]提出的算法均能將焊球內(nèi)氣泡識(shí)別分割出來(lái),但是從微小氣泡和焊球細(xì)節(jié)上來(lái)看,本文算法在精度上要優(yōu)于文獻(xiàn)[11]和文獻(xiàn)[17]的算法。
實(shí)驗(yàn)結(jié)果表明,本文算法對(duì)于BGA焊球的分割識(shí)別有以下幾大優(yōu)點(diǎn):1)可以快速去除背景因素的干擾,完整地提取出焊球區(qū)域;2)對(duì)于焊球內(nèi)的邊緣氣泡,不會(huì)因?yàn)槠湎袼丶?jí)與背景像素級(jí)接近,而將其誤分割出去;3)對(duì)于焊球內(nèi)部因光照等因素造成對(duì)比度差的氣泡,也能很好地將其提取分割出來(lái)。
5 結(jié)語(yǔ)
為了解決BAG氣泡檢測(cè)中傳統(tǒng)的分割算法對(duì)焊球邊緣氣泡的分割結(jié)果不精確的問(wèn)題。本文根據(jù)BGA圖像數(shù)據(jù)集的特點(diǎn)搭建了對(duì)焊球進(jìn)行正確語(yǔ)義分割的FCN,通過(guò)訓(xùn)練測(cè)試得到了輸入BGA圖像的粗分割結(jié)果;然后再經(jīng)由K-means聚類分割算法處理,在去除因光照干擾造成的焊球像素對(duì)比度偏低問(wèn)題的同時(shí)對(duì)增強(qiáng)圖像中焊球及其氣泡區(qū)域進(jìn)行聚類分離,得到最終分割圖像;最后對(duì)原始BGA射線圖像中焊球及氣泡缺陷區(qū)域進(jìn)行標(biāo)記識(shí)別。相較其他算法對(duì)分割結(jié)果進(jìn)行評(píng)估數(shù)據(jù)對(duì)比,可以看出本文算法很好地解決了提出的問(wèn)題,并且針對(duì)部分復(fù)雜的BGA圖像,本文算法也能夠完整地將焊球分離出來(lái),有較優(yōu)的魯棒性和實(shí)用性,滿足BGA工業(yè)檢測(cè)中分割精度的需求。但是全卷積網(wǎng)絡(luò)和K-means聚類算法的運(yùn)行往往會(huì)消耗較大的時(shí)間資源和內(nèi)存資源,并且本文所采用的FCN是一個(gè)相對(duì)基礎(chǔ)的模型,如何有效減少基于卷積神經(jīng)網(wǎng)絡(luò)的分割算法的運(yùn)行時(shí)間,并將更好的語(yǔ)義分割技術(shù)應(yīng)用于BGA工業(yè)檢測(cè)中將是進(jìn)一步的努力方向。
參考文獻(xiàn)
[1]薛明陽(yáng),衛(wèi)國(guó)強(qiáng),金亮,等.不同應(yīng)變速率下BGA焊球剪切斷裂實(shí)驗(yàn)與模擬分析[J].焊接學(xué)報(bào),2014,35(3):45-48.(XUE M Y, WEI G Q, JIN L, et al. Shear fracture test and simulation analysis of BGA welding balls at different strain rates [J]. Transactions of the China Welding Institution, 2014, 35(3): 45-48.)
[2]桂晟偲,劉佳.BGA空洞控制的回歸分析研究[J].電子工藝技術(shù),2011,32(3):148-151.(GUI S C, LIU J. Study on regression analysis for BGA void control [J]. Electronic Process Technology, 2011, 32(3): 148-151.)
[3]方園,符永高,王玲,等.微電子封裝無(wú)鉛焊點(diǎn)的可靠性研究進(jìn)展及評(píng)述[J].電子工藝技術(shù),2010,31(2):72-76.(FANG Y, FU Y G, WANG L, et al. Progress and review on lead-free solder joint reliability in micro-electronic packaging [J]. Electronic Process Technology, 2010, 31(2): 72-76.)
[4]李樂(lè).基于精密微焦點(diǎn)X射線的BGA焊點(diǎn)缺陷檢測(cè)關(guān)鍵技術(shù)研究[D].廣州:華南理工大學(xué),2014:39-40.(LI L. Research on key technologies of BGA solder joint defect detection based on precision micro-focus X-ray [D]. Guangzhou: South China University of Technology, 2014: 39-40.)
[5]王樹清,文大化.混裝條件下BGA焊點(diǎn)空洞問(wèn)題[J].電子工藝技術(shù),2012,33(5):289-291.(WANG S Q, WEN D H. BGA solder joint void problem under mixed loading [J]. Electronic Process Technology, 2012, 33(5): 289-291.)
[6]SA-NGUANNAM A, SRINONCHAT J. Analysis ball grid array defects by using new image technique [C]// Proceedings of the 9th International Conference on Signal Processing. Piscataway, NJ: IEEE, 2008: 785-788.
[7]夏石川,桂志國(guó),張權(quán),等.基于偏微分方程的BGA射線圖像去噪方法[J].中北大學(xué)學(xué)報(bào)(自然科學(xué)版),2013, 34(6):667-672.(XIA S C, GUI Z G, ZHANG Q, et al. Denoising methods based on partial differential equation for BGA X-ray image [J]. Journal of North University of China (Natural Science Edition), 2013, 34(6): 667-672.)
[8]PENG S H, NAM H D. BGA void detection in X-ray images based on a new blob detector [C]// Proceedings of the 4th International Congress on Image and Signal Processing. Piscataway, NJ: IEEE, 2011:1847-1850.
[9]SUMIMOTO T, MARUYAMA T, AZUMA Y, et al. Development of image analysis for detection of defects of BGA by using X-ray images [C]// Proceedings of the 20th IEEE Instrumentation Technology Conference. Piscataway, NJ: IEEE, 2003: 1131-1136.
[10]SAID A F, BENNETT B L, KARAM L J, et al. Robust automatic void detection in solder balls [C]// Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway, NJ: IEEE, 2010: 1650-1653.
[11]張俊生,王明泉,郭晉秦,等.球柵陣列焊點(diǎn)空洞缺陷的數(shù)學(xué)形態(tài)學(xué)分析[J].科學(xué)技術(shù)與工程,2018,18(2):296-299.(ZHANG J S, WANG M Q, GUO J Q, et al. Analysis of void defects in BGA solder joints with mathematical morphology [J]. Science Technology and Engineering, 2018,18(2): 296-299.)
[12]SHELHAMER E, LONG J, DARRELL T. Fully convolutional networks for semantic segmentation [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(4): 640-651.
[13]魏杰.基于K-means聚類算法改進(jìn)算法的研究[J].信息通信,2018(5):14-15.(WEI J. Research on improved algorithm based on K-means clustering algorithm [J]. Information and Communication, 2018(5): 14-15.)
[14]劉一鳴,張鵬程,劉祎,等.基于全卷積網(wǎng)絡(luò)和條件隨機(jī)場(chǎng)的宮頸癌細(xì)胞學(xué)圖像的細(xì)胞核分割[J].計(jì)算機(jī)應(yīng)用,2018,38(11):3348-3354.(LIU Y M, ZHANG P C, LIU Y, et al. Segmentation of cervical nuclei based on fully convolutional network and conditional random field [J]. Journal of Computer Applications, 2018,38(11): 3348-3354.)
[15]SIMONYAN K,ZISSERMAN A. Very deep convolutional networks for large-scale image recognition [EB/OL]. [2018-11-20]. https://arxiv.org/pdf/1409.1556.pdf.
[16]胡明輝,李俊,申妍燕,等.基于深度神經(jīng)網(wǎng)絡(luò)的尺橈骨遠(yuǎn)端圖像語(yǔ)義分割[J].圖像與信號(hào)處理,2018,7(2):85-95.(HU M H, LI J, SHEN Y Y, et al. DRU image semantic segmentation using deep neural networks [J]. Journal of Image and Signal Processing, 2018, 7(2): 85-95.)
[17]張俊生,王明泉,郭晉秦,等.BGA焊點(diǎn)氣泡缺陷X射線圖像的動(dòng)態(tài)閾值分割方法[J].火力與指揮控制,2018,43(10):113-116.(ZHANG J S, WANG M Q, GUO J Q, et al. Dynamic threshold segmentation method for X-ray images of bubble defects in BGA solder joints [J]. Fire Control and Command Control, 2018, 43(10): 113-116.)
[18]張鵬程.基于平板探測(cè)器的BGA缺陷檢測(cè)技術(shù)[D].太原:中北大學(xué),2009:34-48.(ZHANG P C. BGA defect detection technology based on flat panel detector [D]. Taiyuan: North University of China, 2009: 34-48.)
This work is partially supported by the National Major Scientific Instruments and Equipment Development Special (2014YQ24044508); the National Natural Science Foundation of China (61671413, 61801438); the Middle School Senior Academic Leadership Program (QX201801); the Shanxi Applied Basic Research Project (201801D221196).
ZHAO Ruixiang, born in 1994, M. S. candidate. His research interests include image processing, deep learning.
HOU Honghua, born in 1975, Ph. D., associate professor. Her research interests include medical image processing, computer vision.
ZHANG Pengcheng, born in 1984, Ph. D., lecturer. His research interests include dose calculation and planning optimization in the precision radiation therapy.
LIU Yi, born in 1987, Ph. D., associate professor. Her research interests include image processing, reconstruction, non-destructive testingmedical image reconstruct.
TIAN Zhu, born in 1995, M. S. candidate. His research interests include image segmentation, deep learning.
GUI Zhiguo, born in 1972, Ph. D., professor. His research interests include signal and information processing, image processing and recognition, image reconstruct.
