月球車移動系統可靠性試驗技術研究
2019-10-31 01:35:08楊曉青羅小桃劉殿富王衛軍
載人航天 2019年5期
關鍵詞:系統
楊曉青,羅小桃,劉殿富,2,王衛軍,3
(1.上海宇航系統工程研究所,上海201109;2.上海市空間飛行器機構重點實驗室,上海201108;3.中國航天科技集團有限公司空間結構與機構技術實驗室,上海201108)
1 引言
移動系統在月球表面,與在地球表面行走差異較大,主要是因為地球土壤與月壤在力學特性的差異所致。為真實模擬月球車在軌工作環境和狀態,需要在地面建立一套有效的試驗模擬系統,進行車輪與月壤接觸特性的模擬、月面著陸區地形的三維重構、月球車地面行走時1/6g低重力狀態的模擬、月球車從著陸器上可靠分離至月面的全過程模擬、移動系統在月面地形通過性測試等,保證月球車試驗的充分性、有效性和可靠性,從而正確評估月球車的性能和在軌工作能力。
20世紀70年代,俄羅斯的無人探測器和美國的載人登月車登上月球,20世紀末和21世紀初,美國多輛火星巡視器登陸火星。國內地外天體巡視器的試驗移動系統地面試驗技術將是全新自主的嘗試。本文對月球車移動系統研制過程中進行的所有地面測試和評價設備、方法進行總結,從溫度、密封、壤力學性能、非結構化地形地貌、低重力模擬、釋放分離、移動功能與性能等方面開展試驗驗證。
2 月球環境及試驗設備現狀分析
月球月晝和月夜的溫差高達300℃以上,移動系統在無任何主動熱控措施的情況下需承受300℃以上的溫差。目前空間機構的環境溫差均小于月球環境,因此需要研制新的實驗設備以適應新的溫差范圍。
月球表面月塵帶靜電,極具吸附性,容易吸附在活動部件的關節處,因此需要對活動部件采取有效的防塵密封措施,提高移動系統的壽命和效率。目前沒有針對高低溫和揚塵環境下密封件的試驗方法,需要新建試驗方法,有效評價密封件的防塵效果。
作為月球車運動的載體,月壤是研究月球車移動特性不可或缺的部分。如何將月壤的物理力學性能與模擬月壤的顆粒大小、粒徑級配、配置過程的擾動程度、烘烤程度等幾何參數建立聯系,配備出符合工程要求的模擬月壤需要進一步研究。
由于月表形貌的復雜性、月壤物理力學參數的離散性、非規則結構輪與非規則化路面接觸面積的不確定性,因此需要結合仿真分析和豐富的經驗獲得準確的移動通過性參數,配合車輪臺架試驗,建立一套易實現且可靠的輪壤作用特性地面驗證系統。
月面為非結構化路面,地形復雜多變,不同地形地貌下月球車的性能需要充分考核。同時由于不同區域月壤粒徑和力學性能差異,月球車的極限能力也不盡相同。因此地面需要構建不同的極限地形進行組合以考核月球車的在軌工作能力;需要根據指標要求,采用地形典型化、標準化、模塊化設計和劃分典型功能試驗區相結合的方法,建立一套模擬月表非結構化路面的地形地貌試驗區域。
月球重力為地球的1/6,月球車地面各項運動與在軌各項運動之間的等價關系無法通過理論或經驗來評價。因此需要建立一套1/6g低重力平衡吊掛裝置,在移動系統爬坡、越障、轉向等姿態連續變化或突變時,抵消移動系統多余的5/6g的重力,從而評價地面試驗的有效性。
由于著陸區的地形充滿未知可能,因此著陸器著陸后的姿態是不確定的,只能控制在一定的指標范圍內。地面需要對該指標范圍內的所有組合角度進行模擬,建立一套著陸器模擬系統,模擬著陸后的不同的角度組合,從而開展移動系統在不同姿態下的分離試驗,驗證分離能力。
月面環境復雜、地形多樣,移動分系統在軌工作過程中每個動作都涉及多種性能,地面需要考核的指標多。試驗設計中需要將性能指標轉化為可測試的試驗項目,測試中控制產品與環境狀態以保證測試結果與技術指標的準確對應,并對各項指標的極限能力形成準確認識。在軌工作時產品各性能都是相互作用的,地面測試獲得單一功能或性能的最大值并以少量參試樣本、有限試驗次數充分驗證產品可靠性方案在國內外暫無公認的通用標準,均需根據產品實際情況進行分析,提出一系列具有科學依據并切實可行的試驗方法。
3 可靠性試驗技術的組成
月面巡視器移動分系統需要驗證的技術指標繁多、驗證復雜,為了真實可靠地模擬移動分系統月面工作情況,地面試驗系統圍繞在軌任務開展,移動系統地面試驗技術構成見圖1。其主要包括月面極端溫差試驗技術、密封件大溫差揚塵環境試驗技術、月壤力學性能模擬技術、非結構化地形地貌綜合模擬、月面輪壤作用地面試驗技術、低重力環境模擬技術、釋放分離集成模擬技術、月面移動功能與性能驗證技術。可靠性試驗按照先部件后系統的順序進行。
3.1 月面極端溫差試驗技術
結合材料學、熱學、機構學、氣動學等專業知識,同時對密封、熱、控制、結構和整體布局等進行集成設計,研制一套長時間高效深冷環境模擬系統、一套超高真空環境模擬試驗系統,實現地面長時間極端溫度和超高真空熱環境的模擬,解決了移動分系統產品月夜極端溫度適應能力與超高真空環境適應性驗證難的問題。
該深冷生存試驗系統由深冷容器系統、斯特林制冷系統、冷水機組、氦氣冷量供給系統、氦氣補氣與抽氣系統、液氮供給系統、液氮回收系統、氣氮供給系統、真空泵抽氣系統和控制系統構成。它主要有2大特點:
1)冷卻速度快。輻射冷卻的方式隨著物體間溫差的縮小,冷卻速率急劇減小,通常需要幾十個小時的時間才能降低到目標溫度。且該目標溫度受冷源液氮的限制以及有限時間內存在有限溫差的限制,一般在-170℃以上。本系統則采用內部非真空條件的工作模式,即在試驗罐體內部工作區域充注氦氣,除與熱真空罐相同的輻射換熱外,增加了氦氣在腔內進行自然對流和導熱的雙重強化傳熱效果,從而大大加快了對目標產品的降溫速度。研究表明,在27℃至-188℃的降溫過程中,降溫速率可保證大于 3℃/min,在-188℃至-205℃的降溫過程中,降溫速率也大于0.4℃/min。其直接效果是使得原先通過真空罐冷卻所需的時間縮短為幾十分之一。
2)工作溫區寬。系統設計工作溫區為-205~+100℃,通過內置加熱籠的方式,高溫可以到達160℃。設計中除了布置液氮冷卻通路外,主要采用大制冷量斯特林制冷機為冷源,該制冷機可在-205℃提供1200 W制冷量,在-253℃提供200 W制冷量,這為系統擴展至更低工作溫區提供了條件。同時斯特林制冷機中的循環系統保證了資源的有效利用,為長達15天的長時間深冷試驗提供了保障。
移動系統深冷高低溫存儲的溫度為+155~-190℃,移動系統主要運動部件的溫度試驗均在此高低溫箱中完成。這套試驗系統的建立為移動系統研制工作的順利開展提供了必要條件。
3.2 密封件大溫差揚塵環境試驗技術
結合密封圈的工作環境,包括大溫差、真空和月塵吸附等,建立密封圈性能測試系統,該測試系統包括密封圈安裝軸、揚塵空間、密封圈和月塵收集器,結構如圖2所示。在揚塵空間內,有揚塵機構不斷將該區域內的模擬月壤翻至密封件的密封部位,同時密封圈安裝軸與驅動工裝連接,在測試過程中,密封圈安裝軸按照給定速度不停轉動。
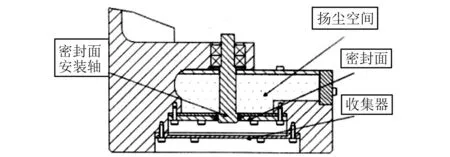
圖2 防塵測試系統的主要組成Fig.2 Composition of dust prevention test system
在防塵能力測試時,將一整套測試設備全部置于高低溫箱中,保證密封件工作在不斷交變的溫度環境下。當在規定的時間內,密封圈轉過規定的圈數后,試驗結束。此時將采集器從測試設備上拆下,用放大鏡觀察采集器上有無模擬月壤。如果在采集器上沒有發現模擬月壤,則說明密封件通過防塵功能測試,該密封件的材料、密封形式能夠滿足月面使用要求。
防塵測試試驗系統全面地測試了密封件的密封性能,將溫度因素、月塵的吸附特性、針對活動部件防塵的特點、密封件的長壽命防塵等特點融為一體。原理清楚,測試方法正確,測試結果有效。
3.3 月壤力學性能模擬技術
模擬月壤制備時,采用同質原料進行模擬月壤的制備,重點分析粒徑分布對力學性能的影響,根據需求設計不同粒徑級配方法實現月壤力學性能的相似模擬。
根據需要制備了SNJ系列應用于月面車輛力學基礎試驗的多種模擬月壤,其性質參數在月壤樣本的變化范圍之內,見表1。
對月壤粒徑分布與承載特性進行專項研究,分析得出粒徑分布對模擬月壤承壓性能影響大:粒徑粗且分布均勻的模擬月壤承壓能力強;相對粒徑越小、顆粒越均勻,承載能力越差[2]。根據現有資料,真實月壤中值粒徑分布為 44~130μm,根據需要,共研制了5種SNJ系列中值粒徑模擬月壤[3]。詳見表2,其中SNJ-2為大范圍測試用壤,其他為摸底試驗用壤[4]。
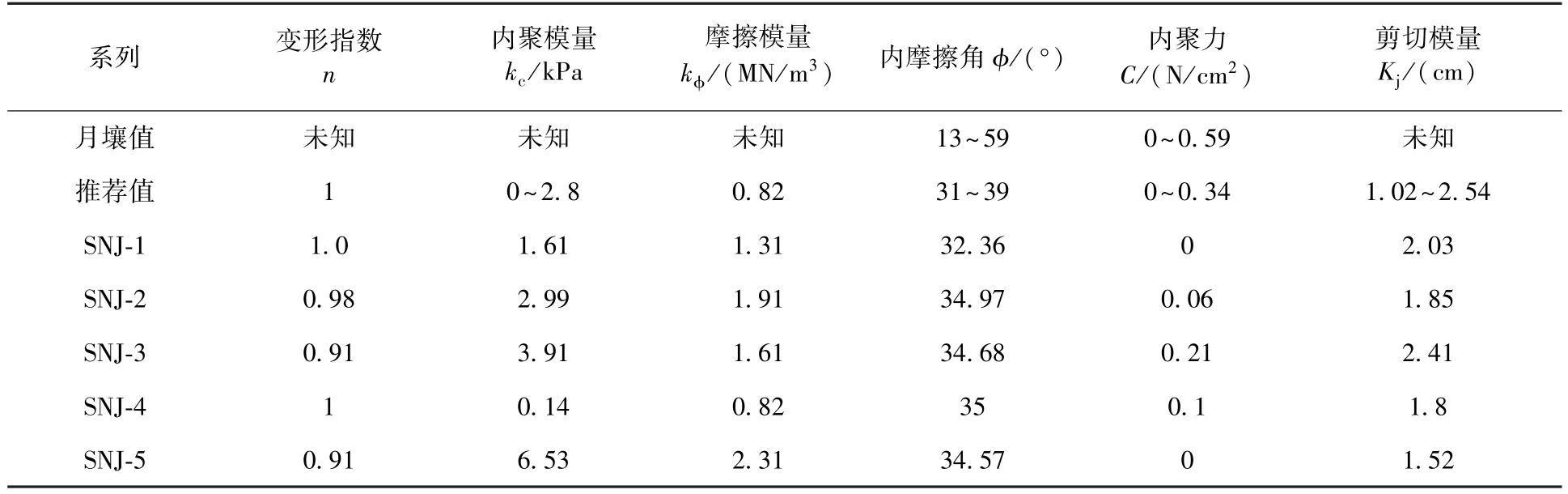
表1 月壤及模擬月壤力學參數指標Table 1 The mechanical parameters of lunar soil and simulated lunar soil

表2 SNJ系列模擬月壤的中值粒徑Table 2 The median diameter of SNJ series simulated lunar soil /μm
配備不同粒徑的模擬月壤,并對它們的物理特性進行研究,從而建立模擬月壤的物理力學性能與粒徑大小、配置過程等幾何參數的關系,用以研究模擬月壤的承載特性,為后續的單輪臺架試驗和移動系統的綜合仿真和測試提供理論和物質基礎。
3.4 非結構化地形地貌綜合模擬
根據探測器著陸區附近的地形,結合移動分系統試驗項目規劃,將地形簡化為平地、斜坡、坑和障礙3種類型。根據試驗場的試驗區面積大小,按照真實月表的坑和石塊的分布概率進行估算,得出試驗場中坑的個數、石塊直徑和數量。
試驗場地按驗證產品指標項目進行區域劃分,形成月表形貌綜合模擬試驗室。試驗室內設有直線行駛區、固定斜坡區以及固定斜坡模擬塊、轉向區、越障區以及典型障礙模塊、V形坑區、可調斜坡區以及可調斜坡設備、綜合形貌區、不同模擬月壤下移動性能摸底測試區等,如圖3所示。
月表形貌綜合模擬試驗室中角度可調斜坡裝置可構建5°~45°之間任意一個坡度值的斜坡,與典型障礙組合,可實現各種極限地形地貌快速構建,用于進行月球車的不同模擬月壤的極限坡度適應能力、一定坡度下越障極限能力、一定障礙下最大坡度適應能力的考核[5]。

圖3 月表形貌綜合模擬試驗室圖Fig.3 Comprehensive simulation laboratory for lunar landform
通過地面輪壤試驗測得,車輪擾動深度不超過20 cm,因此月面形貌綜合模擬試驗場地鋪設厚度為30 cm。在模擬月壤場地整備時,根據月壤密度垂直分布特點,逐層進行模擬月壤初始鋪裝,以減少底部模擬月壤的容重不均勻現象,并模擬底部月壤的密實狀態。對表層模擬月壤進行旋耕翻松處理,深度在150~200 mm范圍內,模擬月表擾動層在自然堆積下的疏松狀態。為避免外界干擾,使用專用整備平臺將鋪設的模擬月壤表面刮平后,通過散落法制備出不小于10 mm的極度松散模擬月壤淺表層,模擬月球表面散落月塵的自然狀態。模擬月壤初始鋪裝工藝流程見圖4。
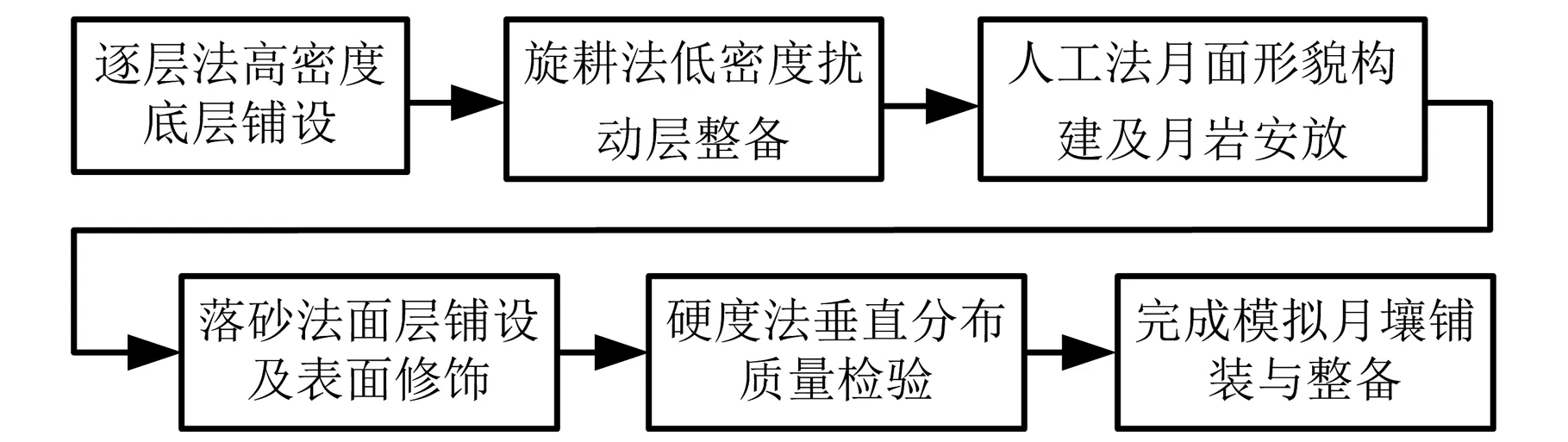
圖4 模擬月壤鋪裝與整備流程Fig.4 The pavement and treatment of simulated lunar soil
場地鋪設完畢后,對模擬月壤疏松度進行測試,測試設備如圖5所示,在一定重力載荷作用下,圓錐儀相對模擬月壤下沉一定的深度,通過測量桿上對應的尺度,換算出該測試點模擬月壤疏松度[6]。
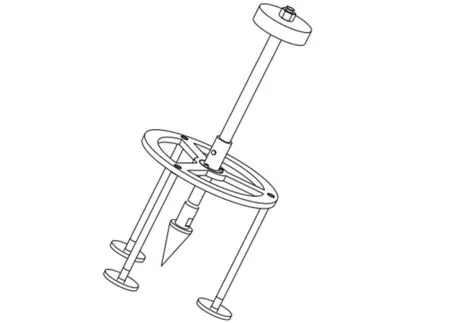
圖5 模擬月壤疏松度測試裝置Fig.5 The testing device for prosity of simulated lunar soil
在有限資源情況下模擬地形地貌,構建出不同的極限地形組合以考核月球車的在軌工作能力。模擬月壤的鋪設方法,在國內外沒有通用標準,試驗發現通過模擬月壤疏松度測試能控制模擬月壤特性的一致性,從而提高移動系統與輪壤相關的各項試驗的準確性。
3.5 月面輪壤作用地面試驗技術
車輪與月壤的接觸特性和承壓特性是月球車移動系統在月面移動的理論基礎,需研制滑移小、牽引力大、通過性強的車輪[7]。
基于輪壤作用動態仿真系統研制輪壤作用試驗系統,通過高精度傳感器的合理布局和結構設計,牽引力測量精度可達0.05 N;車輪沉陷量測量精度可達0.1 mm;車輪驅動力矩的測量精度可達±0.5%FS,試驗系統見圖6。

圖6 輪壤作用試驗系統Fig.6 The test system for interaction between wheel and soil
該輪壤作用試驗系統可實現的功能包括:
1)通過力矩傳感器的車輪載荷反饋,對車輪進行實時閉環加載;
2)精確設置車輪運行參數,自動控制試驗車輪的轉動速度和前進速度;
3)在車輪過坑、越障等過程中,加載臺隨車輪垂直位置的起伏自主跟隨和退讓;
4)配備各類精密傳感器,實時精確測量車輪的掛鉤牽引力、側向力、滑轉率、沉陷等參數;
5)實時顯示測量數據,并通過可視化曲線觀測特性參數的變化趨勢;
6)實時計算車輪的側偏性能、轉向性能、越障性能、爬坡性能、抗側滑性能等力學特性,用于模擬巡視器在非結構環境中克服幾何障礙而正常通過各種地面和地形的行駛能力。
通過建立該輪壤作用試驗系統突破場地的限制,更加專注地研究車輪與模擬月壤之間的作用關系。利用模型計算結果進行車輪多方案比較,再通過輪壤作用試驗系統,從而獲得最優的車輪構型。
3.6 1/6g低重力環境模擬技術
月球車在月面工作時為1/6g低重力,因此地面需要模擬月球車運動時的低重力,才能更真實地模擬月面工作情況。移動系統地面低重力模擬狀態如圖7所示。該低重力模擬裝置包括恒張力控制系統與吊掛位姿跟蹤子系統[8]。
通過恒張力控制系統來實現吊掛力的快速調整,該系統主要由收放吊索機構、力控制機構、定滑輪、傾角測量機構、力傳感器、彈簧裝置以及吊掛工裝構成。當移動分系統運動時,引起吊索的擺動,通過串聯在吊索中的力傳感器測出吊索的張力變化,給出力控制機構中的電動缸的運動方向,改變平衡壓縮彈簧的變形量,從而實現吊索的恒張力控制。當電動缸的伸出或收縮長度達到一定值時,收放吊索機構開始工作,收吊索或放吊索,完成吊索長度的調整[9-10]。恒張力控制吊掛裝置如圖8所示。
通過吊掛位姿跟蹤子系統實現實時動態跟蹤,該系統由桁車平臺、7個二維跟隨小滑臺、吊掛伸縮調整裝置以及轉盤組成。

圖7 移動分系地面低重力模擬狀態圖Fig.7 The ground simulation of low gravity for the mobile sub-system
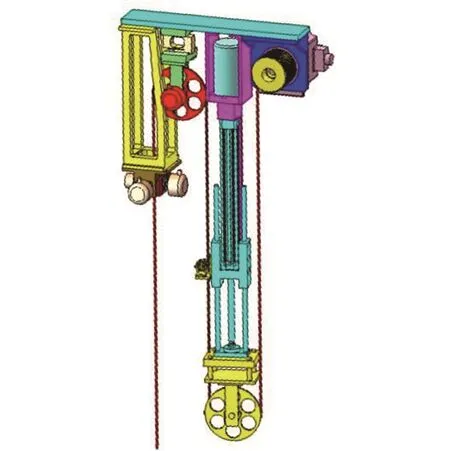
圖8 恒張力控制吊掛裝置Fig.8 The hanging device for constant tension control
水平運動方向采用桁車與滑臺調節組合。桁車平臺采用縱向大車及橫向小車組合模式,保證水平方向大范圍運動的可達性。每個小滑臺由x、y方向2組高精度直線驅動單元組成,作為小范圍運動的跟隨執行部件,實現快速精確的小范圍調整。豎直運動方向采用電動缸和卷揚設備調節,其中電動缸滿足快速調節要求,卷揚實現大范圍的可調。轉向通過安裝在桁車系統下滑臺上的轉盤完成,轉盤安裝后滿足±570°的轉角要求。系統力與位置協調控制分2層:
1)實時控制。根據角度傳感器的反饋信息,實時控制二維跟蹤平臺的伺服電機動作,調整吊索傾角,保證吊索處于鉛垂方向。根據力傳感器的反饋信息,恒張力控制桿和卷揚機動作,保證吊索張力滿足控制要求。對于吊索角度和張力控制,要求實時性高,響應快。所以該層控制策略上處于最高級。
2)分時控制。根據吊點信息計算出吊點位置信息是否達到閾值,如果達到,縱向運行大車、橫向運行小車運動,保證吊點運動在合適范圍內;如果月面巡視器運動方向發生變化,通過轉盤控制單元控制轉盤作相應的轉向,保證水平跟隨平臺的坐標系與巡視器坐標系平行[11]。
該1/6g低重力吊掛系統通過多點吊掛組合能實現位置激變后載荷的快速準確調整,能解決移動系統活動部件多、位置變化無規律的特點。
3.7 釋放分離集成模擬技術
探測器和月球車分離時,探測器的著陸姿態對分離的難度有很大影響,如果著陸姿態傾斜小,則分離難度小;著陸姿態傾斜大,則月球車分離難度也隨著傾斜角度的增大而增大。分離過程如圖9所示。
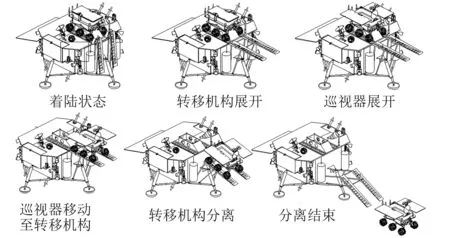
圖9 探測器和月球車分離過程Fig.9 The separation process of rover and probe
按照分離過程的要求,構建一套與移動分系統相匹配的著陸器姿態模擬平臺,如圖10所示。著陸器姿態模擬平臺具有實現巡視器與著陸器釋放過程、月面著陸后著陸器頂板和懸梯可能出現的各種姿態模擬功能,可用于移動分系統模擬與著陸器釋放、轉移、分離過程中各種功能性能測試。平臺主體以“共心三軸承”機構為基礎,選擇上楔盤子系統和下楔盤子系統共同構成裝置的角度調節部分。下楔盤和上楔盤具有相同的楔角(23°)。兩者的相對轉動,可以疊加得到0°~46°之間的任意角度,從而使頂板模塊產生0°~46°之間的任意傾斜角度。即3個自由度“合成”所需的俯仰角和側傾角,保證平臺在大載荷大傾角狀態下定位精度高,且角度連續可調[12]。

圖10 著陸器姿態模擬平臺圖Fig.10 The attitude simulation platform for the lander
釋放分離集成模擬系統解決了巡視器與著陸器在軌壓緊、釋放、轉移、分離全過程中各種工況的地面模擬問題,實現了極限工況全覆蓋下移動性能與機構能力,同時考核在軌狀態實時快速跟蹤復現與驗證的效果。以“共心三軸承”技術為基礎,采用3個自由度“合成”所需的x、y二自由度方法,解決了釋放轉移過程中著陸器頂板載荷大、姿態傾角大、角度調整要求連續快捷與頂板定姿精度要求高、地面模擬成本要求低等多組對立約束問題,達到了頂板大載荷下定姿精度高、頂板角度快速連續可調的效果,為兩器分離模擬試驗的開展提供更好方式。
3.8 月面移動功能與性能驗證技術
對月面地形和著陸姿態進行分析,月球車需具備克服200 mm障礙、20°坡、最小轉彎半徑小于1.5 m、橫向靜態穩定性大于30°、縱向靜態穩定性大于36°及最大速度大于200 m/h等能力。
采用多交集事件單軸驗證方法,提出了一系列簡便可行、準確有效的典型移動功能性能測試方案,構建了最小轉向半徑、最大移動速度、適應坡度、越障、過坑、加電與斷電制動保持等功能與性能測試方案[13],明確了移動分系統參試產品狀態、環境模擬方法、指標與試驗測試參數對應關系等。
除在非結構地形地貌場地進行月球車各項性能摸底試驗外,還基于綜合建模、分析評估和結果分析技術(Probabilistic Risk Assessment,PRA),建立了一套移動分系統在軌工作可靠性試驗及評估體系,包括組件可靠性試驗及評估、各功能事件的試驗及評估、系統綜合試驗及評估等方面,涉及事件樹和故障樹建模、貝葉斯網絡建模、應力-強度分析、貝葉斯分析以及蒙特卡洛仿真分析等技術方法,建模示意見圖11。
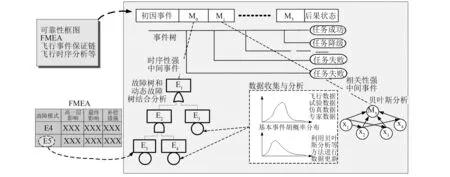
圖11 基于事件鏈的任務過程綜合建模示意圖Fig.11 Comprehensive modeling of task process based on event chain
4 地面試驗技術驗證
在試驗和評估體系形成的共同架構下,移動系統順利通過地面評估,在軌按照各種規劃路徑,為月球車在軌探測提供了可靠的移動平臺。
4.1 月球車在軌工作情況
玉兔2號月球車2019年1月3日與探測器順利分離,抵達月面,進入月面工作階段。在軌完成了移動系統的主要功能驗證,包括月面著陸前階段承載和生存功能,月面分離功能,支撐巡視器重量功能,前進、后退、制動等能力,在平面和坡上具有原地轉向和行進間轉向等多種轉向能力,具有地形適應能力,包括坡、坑和障礙物等,具有縱向和橫向穩定性,具有加電和斷電保持巡視器靜止的功能,適應月面環境,月晝期間正常工作,安全度過月夜后具有正常工作能力。
移動系統在軌典型工況中速度和電流的曲線如圖12、圖13所示,在軌工作數據表明,在軌運動的速度和電流等指標與地面試驗情況保持一致,從而充分肯定了地面試驗的有效性。
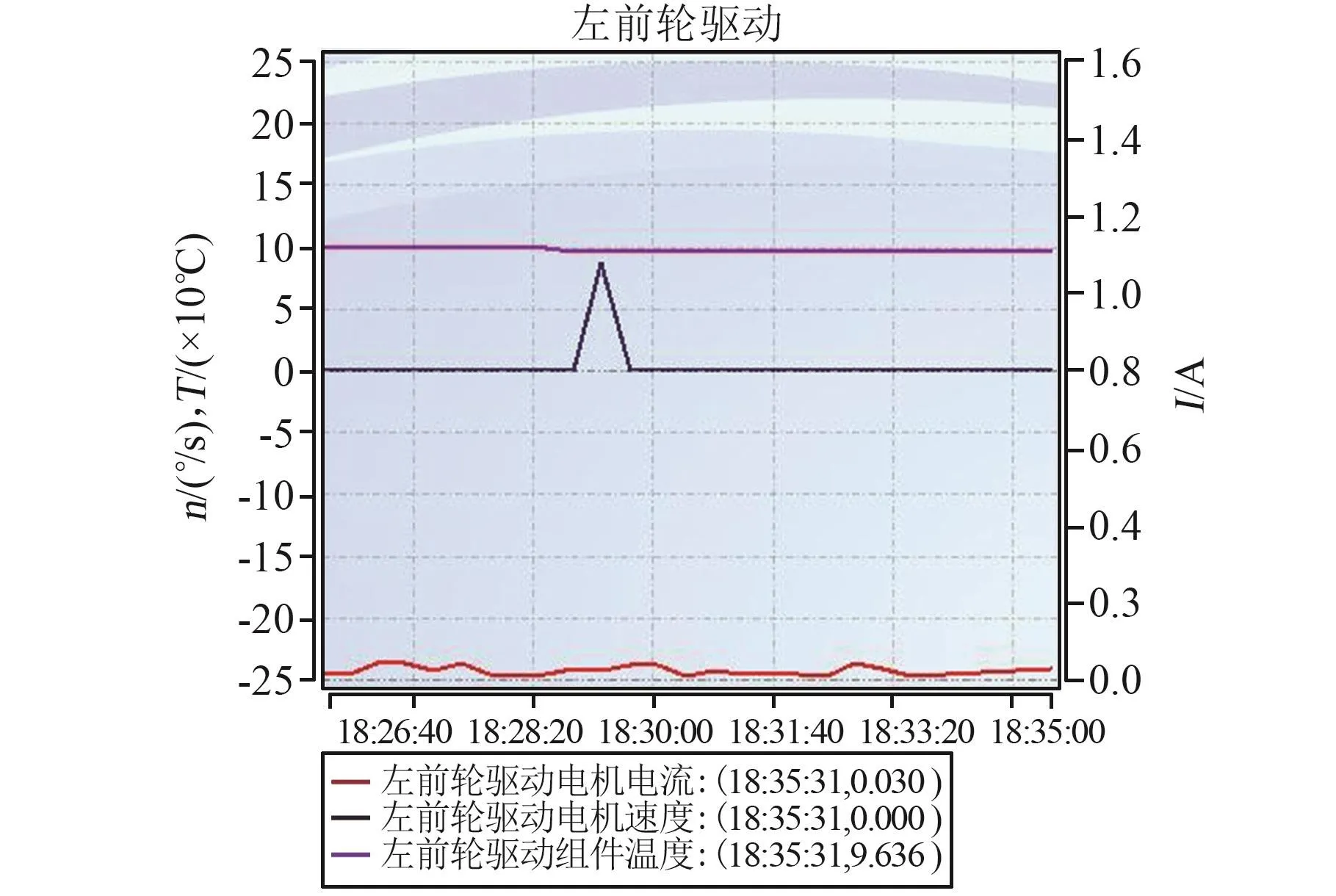
圖12 在軌盲走驅動輪運動曲線Fig.12 The data curve of the driving wheel
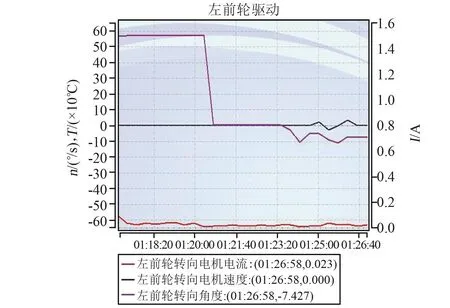
圖13 在軌轉向驅動輪運動曲線Fig.13 The data curve of the steering wheel
從在軌避障相機拍攝的圖片(圖14)可看出,車輪在月面行駛時,月塵的吸附特性導致車輪表面很多區域都積滿了月塵,從而推斷活動部件附近,尤其是驅動機構附近也積滿月塵,由此看出,密封件的防塵效果顯著,進一步表明密封防塵試驗方法的有效和準確。
移動系統按照路徑規劃結果,在軌直線行駛到位精度高、轉向定位準確,為精確探測、尋找休眠點等關鍵事件的快速實現提供良好的基礎。
至3月13日第3次休眠,經歷了3個月晝和月夜,月球車完成3個月壽命期的在軌工作,累計移動距離達到163 m。目前移動系統各項參數正常,狀態良好。月球車在月面行走軌跡圖如圖15所示。
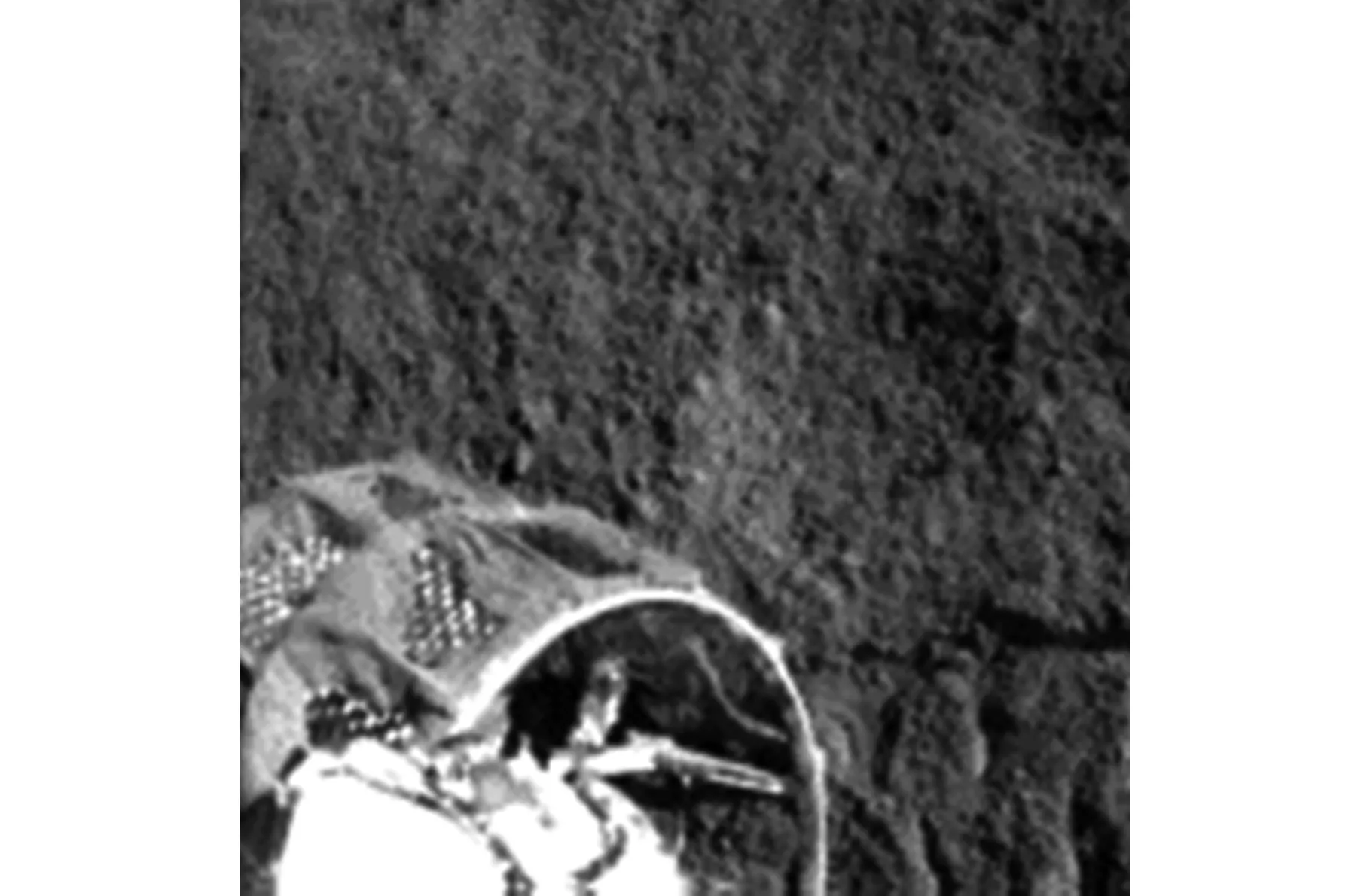
圖14 在軌車輪積滿月塵Fig.14 The wheel full of lunar dust

圖15 月球車月面移動軌跡圖Fig.15 The trajectory of lunar rover on the moon
4.2 在軌數據與地面試驗數據對比
巡視器在軌完成的主要工作為盲走和原地轉向,從直線行駛能力、原地轉向能力方面,將在軌數據和地面試驗數據進行對比,對比結果如表3所示。
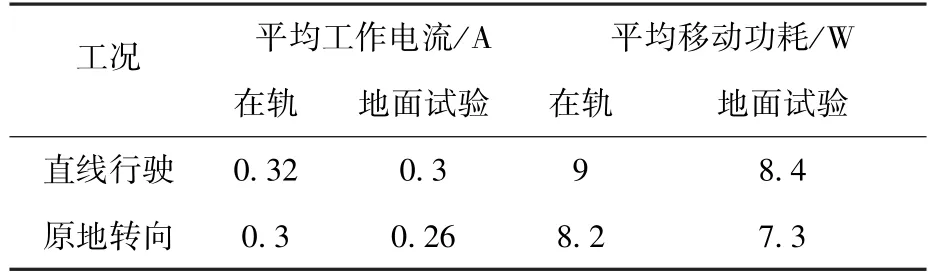
表3 在軌和地面試驗數據對比Table 3 Comparison of on-orbit and ground test
對比結果表明,在軌的平均工作電流和平均移動功耗與地面基本保持一致,地面試驗能作為移動分系統產品合格的評價標準。
5 結論
在月球車可靠性試驗研究過程中,建立了能夠適應345℃溫差的深冷高低溫試驗系統,模擬月面溫度環境;建立了活動部件密封圈試驗系統,掌握高低溫、揚塵環境下密封產品的試驗方法;建立了月球車月面通過性試驗和月面低重力模擬的月貌試驗室,能準確評估移動系統的性能;研制了專門研究不同構型的車輪和月壤作用關系的輪壤測試設備,用于準確預測車輪的行駛性能;研制了釋放分離設備,模擬月球車與探測器分離所有角度,全面模擬兩器分離的所有工況。月球車在軌成功服役表明地面試驗技術能作為其評價的手段,為其他深空探測移動平臺的試驗奠定基礎,后續根據探測星球的土壤特點,還需進一步完善試驗條件和評價體系。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32