基于RFID技術的室內定位算法研究
2019-10-30 08:28:52樊曉曦王藝霖江翰峰張國平
中國應急管理科學 2019年11期
關鍵詞:信號
樊曉曦 王藝霖 江翰峰 張國平

摘要:在本研究中為深入分析并提高室內定位系統的功能,在本節中設計了主動射頻識別技術,將其應用于室內環境低成本定位仿真分析,通過引入仿真算法,參考標簽輔助定位,由于布局導致接收信號不同對定位電子標簽完成距離和方向進行預測,闡述了該系統的具體布局方式,針對不同方式對系統產生的定位精度開展仿真分析,結合仿真結果表明選取適合企業生產車間,人員定位的有效方案,利用該方案能夠顯著提高室內定位精確度,并降低整個定位系統成本具有較強的實用價值。
關鍵字:RFID;室內定位;算法;研究
近年來隨著科學技術的發展,室內目標定位具有十分重要的作用,在本研究中針對某企業生產車間人員定位系統進行研究設計,在日常生產中利用該系統能夠為企業提供人員考勤管理并有效實現生產指揮,一旦發現安全事故時,能夠及時為搶險救災提供保障,在室內環境下信息攜帶功能應用最廣,傳輸可靠射頻識別技術,射頻識別技術定位系統是通過標簽對物品的唯一識別性能,通過讀卡器接收的電子標簽信號來獲得具體的定位信息。目前針對室內定位控系統其定位誤差通常在1.2米左右的范圍,其中射頻識別技術的定位誤差可達到一米以內,這種射頻識別系統具有良好的可拓展性,適用于處理復雜環境,但該系統也會面臨硬件設備成本高,耗時較長,定位精度很容易受到標簽密度分布和形狀的影響,因此對其使用范圍受到一定程度約束。基于目前現有室內定位算法的不足之處的研究,提出了接受信號強度室內定位算法,利用多屏讀卡器和轉發讀卡器指令標簽信號進行定位,相比傳統的定位算法來說這種算法所使用的讀寫器較少,而且標簽較少,能夠提高定位精度,降低企業的運營成本以及降低系統現場布局難度,通過組合方式擴大定位區域,能夠彌補傳統定位系統的不足之處。
1定位方法分析
常見的定位方法包括基于信號到達角定位,接受信號強度定位,信號到達時間定位等,由于室內環境被視距傳輸,多徑傳輸效應的存在,導致信號到達接收端存在一定程度的時延和不同入射角。信號到達時間和信號到達角這兩種定位方式在室內空間存在不可預測誤差和高精度時鐘、硬件設備成本較高等問題,相比信號強度定位方法檢測設備比較簡單,通過多次測量平均值來提高最終信號強度檢測的精確度,以降低遮蔽和多徑效應的不良影響,也是目前室內空間定位的主要研究方向,因此在本研究中采用基于信號強度這種方法進行定位系統的研究。
2構建系統模型
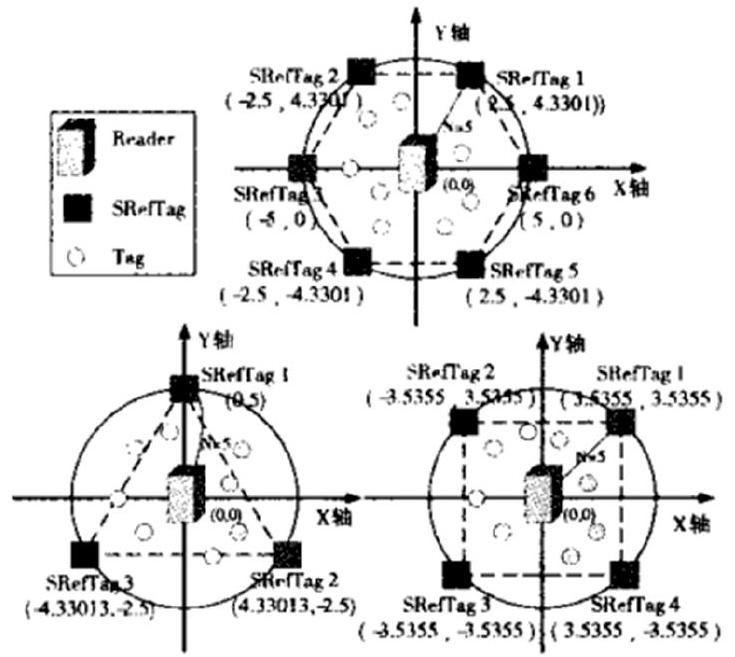
定位系統在布局上需要引入參考點,即使用參考標簽完成輔助定位,這些標簽能夠實現轉發讀卡器信號的功能,結合布局情況和信號接收強度,對電子標簽完成位置估計,整個定位系統的構建包括讀卡器,參考標簽,待定位標簽。具體來看讀卡器可以使用多屏讀卡器用于發送不同強度的射頻信號,最大信號強度為fullpower,最遠距離為n米,指定參考標簽并完成標簽轉發動作,參考標簽的位置是固定的,其功率是sREFtgPw可傳輸距離最高為m米,能夠具備讀卡器傳輸指令轉發的功能。待定位標簽其功率為tagpw可傳輸距離為n米,具體的系統布局如下所示,分別存在三、四、六個參考標簽數目。
在平面中間放置讀卡器,讀卡器和參考坐標的具體位置信息是一致的,在距離一層讀卡器n米位置均勻分布參考標簽,參考標簽的數目可以是三,四,六個等,可以假設n個待測定標簽位于半徑為n的區域內。
收集定位系統的信息.在信息收集過程中具體流程如下:第一需要以最大功率由讀卡器對待定位標簽,參考標簽進行信號的發射,并準確記錄被識別的定位標簽;第2步參考標簽按照順序轉發讀卡器的信號指令,并準確記錄每個參考標簽信號被哪些在定位標簽所接收;第3步需要改變讀卡器信號傳輸的功率準確定位哪些已經被識別的定位標簽;第4步重復上述步驟。
3具體定位算法的實現分析
可以通過兩種信號確定在定位標簽的位置,包括位于參考標簽的傳輸范圍內,以及能夠被讀卡器發送的輔助信號識別,由于在定位系統中參考標簽的位置是固定的,由讀卡器所發送的輔助信號功率是根據環境不斷變化的,因此在本研究中算法可以根據參考標簽和待定標簽的位置進行細化。假設讀卡器發送輔助信號功率分別為power a和b,則power可以表示讀卡器發送功率power信號強度時能夠達到的最遠距離,且power a低于power b且小于等于fullpower。在定位標簽位于0個參考標簽范圍內,結合讀卡器所讀取的待定的標簽信號強度,進而判斷該位置的遠近,但在信號獲取中無明顯的方向信息,且在這種情況下需要待定位標簽位置及讀卡器位置存在下列公式,
該公式中(Reader-X,Reader-Y)表示處于平面中間的讀卡器坐標。
如果待定位標簽有一個位于參考標簽范圍內,且待定位標簽位于讀卡器和窗口標簽的連線位置與參考系的區域,需要結合信號功率強度進行計算。綁定該定位標簽在讀卡器發送的輔助信號a和b之間,那么待定位標簽的位置可以用下列公式表示
當待定位標簽位于power a的范圍內,那么最終帶定位標簽的位置信號可以用下列公式表示
最終帶定位標簽的方程如下
如果待定為標簽在兩個參考標簽的范圍內,待定位標簽在讀卡器和兩個參考標簽連線位置的垂線直線上,且與讀卡器距離為dis。當定義標簽位于a和b輔助信號范圍內,則與讀卡器的距離如下
當待定位標簽位于a輔助信號范圍內,那么其與讀卡器之間的距離可以用下列公式表示
通過上述公式能夠計算待定位標簽的位置存在兩個目標解,其距離參考標簽較近的可作為最終真值。
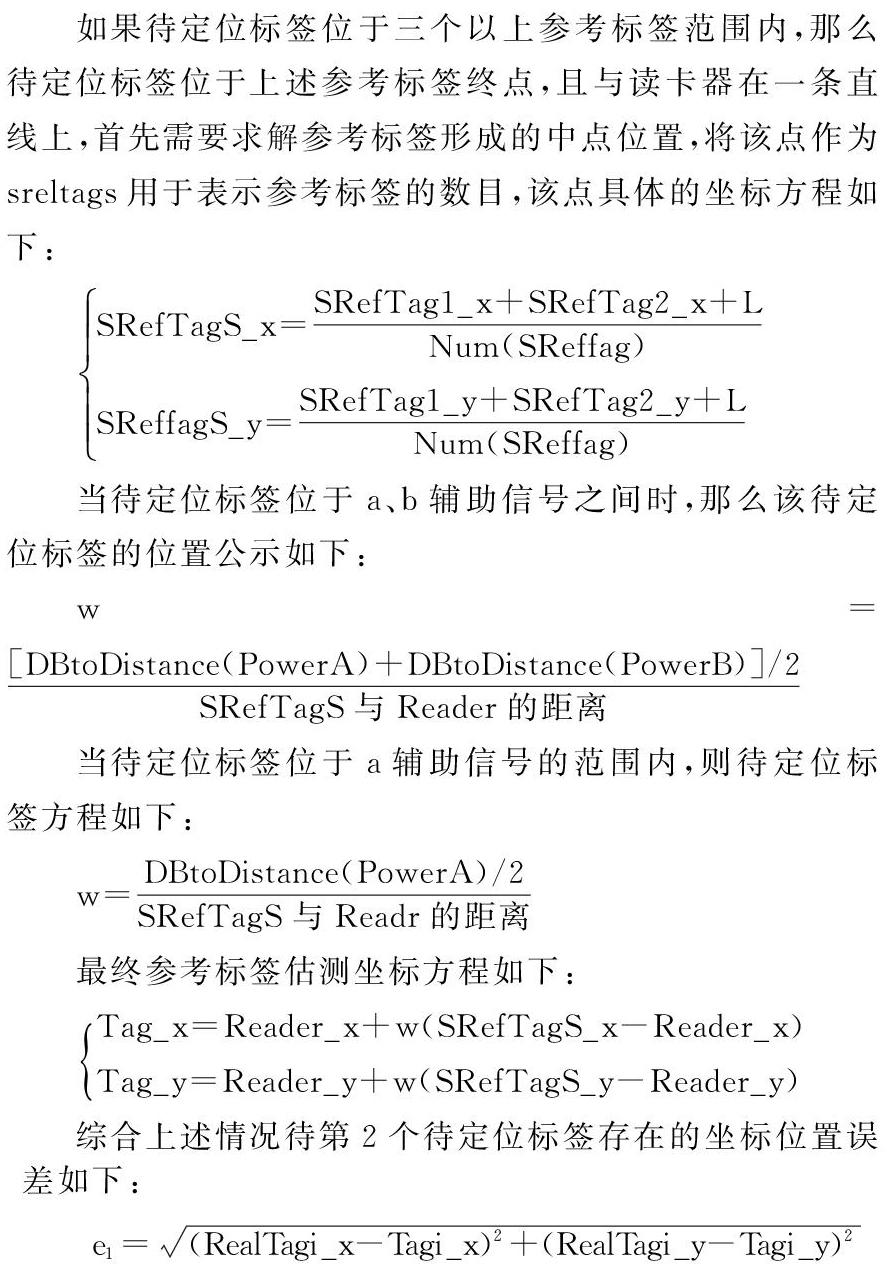
如果待定位標簽位于三個以上參考標簽范圍內,那么待定位標簽位于上述參考標簽終點,且與讀卡器在一條直線上,首先需要求解參考標簽形成的中點位置,將該點作為sreltags用于表示參考標簽的數目,該點具體的坐標方程如下
當待定位標簽位于a、b輔助信號之間時,那么該待定位標簽的位置公示如下,
當待定位標簽位于a輔助信號的范圍內,則待定位標簽方程如下
最終參考標簽估測坐標方程如下
綜合上述情況待第2個待定位標簽存在的坐標位置誤差如下
在上述公式中(RealTagi-X,RealTagi-Y)表示第i個待定位標簽的真實距離,其表示第i個待定位標簽計算距離,n是指待定位標簽的數目
4仿真分析
在具體實驗過程中,假設讀卡器能夠識別的圓形區域中任取400個點,作為樣點和待定位標簽的真實坐標,具體的模型布局如下所示:在仿真過程中設置參數假設讀卡器和參考標簽距離為5米,參考標簽最大傳輸功率為18.77dbm,讀卡器發送兩層輔助功率時,第1層功率為18.77dbm,第2層為11.555dbm,當讀卡器發送第3層輔助功率時第1層功率為18.77dbm,第2層為14.54dbm,第3層為7.32dbm,功率和距離等具體關系如下公式所示,
在上述公式中距離可用D表示,單位為米,距離地和傳輸功率關系可以用DBTodIstance表示其單位為dbm,結合系統參數變化能夠對平均定位誤差分析,找到更高的精度。
在分析輔助功率對整個系統定位誤差產生的影響時,當讀卡器發送2層輔助功率時,由于第1層輔助信號是不變的,需要改變第2種信號功率,實際能夠處于0~18.77.5之間,當讀卡器數目變化時,進而會改變讀卡器第2層輔助功率對誤差產生的影響。根據仿真結果發現,給定義參考標簽數目之后定位模型誤差會縮小,第2層輔助信號功率逐漸發生變化,當輔助功率在10 dbm時平均誤差最小,而當讀卡器達到第3層輔助功率時,第1、第2層信號功率是不變的,逐漸改變第3層的信號功率使其能夠在0~14.54.5之間,分析對系統平均誤差的影響,第1,第3層信號功率不變,改變第2層輔助信號功率,使其能夠在7.32和18.77dbm之間進行變化,分析對其對于性統誤差產生的影響。通過仿真結果發現,逐漸改變讀卡器發送輔助工具信號強度對平均誤差會產生影響,當第2層幅度信號功率處于14dbm時,其最終產生對系統產生的平均誤差較小,讓第3層信號強度在8dem左右時,此時對于系統平均誤差產生的影響是最小的。通過比較發現,當讀卡器輔助功率由第2直接升到第3層時,此時模型對系統產生的平均誤差有一定程度影響,但如果僅增加輔助功率層數,則無法減少定位誤差,但同時設置較多的輔助功率層數時也會很難計算坐標位置,且整個處理過程中難度較高。
分析參考標簽的數目對系統誤差產生的影響,通過模型結構我們可以發現該模型誤差和使用參考標簽數目是呈現反比例關系的,當參考標簽數目由3個逐漸增加到4個,會降低對系統平均誤差的影響,而當參考標簽的數目由4個就是增加到6個,會使對系統平均誤差的變化逐漸減慢。通過實驗可以發現,如果僅增加參考編輯數目時,對于系統定位精確度的變化較小影響較小,而如果設置較多的參考標準數目是會增加計算難度,同時對于實時定位處理來說也是不利的。
參考標簽的距離對系統產生平均誤差的影響,由于系統布局和讀卡器發送兩層輔助信號的功率是固定的,在整個系統中使用4個參考標簽,其最大承受功率在10~22.5之間,最大傳輸范圍也會發生變化。通過仿真結果發現,當讀卡器和參考標簽的距離為5米時,此時在18dbm的范圍內,其產生的平均誤差較小,當讀卡器和參考標簽的距離為4米時,在16 dbm時讀卡器產生的平均誤差最小,參考標簽最大傳輸功率對整個系統平均誤差有顯著影響,當讀卡器和參考標簽的距離最小時,最終平均誤差達到最小所需的功率也是比較小的。
參考標簽的具體位置對于平均誤差產生的影響,結合由于讀卡器發送兩層輔助信號位置和系統布局形式是固定的設置,4個參考標簽數目,逐漸改變參考標簽和讀卡器之間的距離,分析這種情況下對于平均誤差產生的影響,結果可以發現當參考標簽和讀卡器的距離在1-9米之間進行變化時,其最終定位系統平均誤差也會逐漸發生變化,但通過仿真發現兩者之間的距離并不是越小越好,而在5米范圍內此時能夠是平均誤差達到最小值。
擴大算法的范圍分析。針對上述構建的模型定位系統面積越小,在實際使用過程中是難以存在的,為提高系統的應用性,可以在使用較小資源下獲得較高精確度,增加系統覆蓋面積,可以提高參考標簽和讀卡器傳輸工具,并將參考標簽和讀卡器的距離增加。比如當讀卡器發送2層輔助信號功率固定時,相對應的讀卡器和參考標簽傳輸距離范圍對整個系統平均誤差產生的影響,可以發現當兩者之間傳輸距離較大時,也會相應的增加系統平均誤差。為解決這種問題,可以采用細胞組合的方式,由一個讀卡器配備多個參考標簽作為基本單元,該基本單元布局可以進行組合,進而擴大整體的覆蓋范圍,采用這種細胞組合方法可以提高系統的定位精確度,減少所使用的參考標簽數目,適用于大范圍的定位。
小結
在本研究中設計了主動射頻識別技術的低成本定位仿真算法,利用該方法能夠提高室內定位系統的性能。
參考文獻
[1]王小輝, 田磊. 基于RFID技術的三維定位算法研究[J]. 電子設計工程, 2017, 25(06):136-139.
[2]尹強. 基于RSSI的RFID室內定位方法研究[D].? 2017.
作者簡介:
1.樊曉曦,男,漢族,中國石油大學(華東),計算機科學與技術學院本科在讀
2. 王藝霖 男 漢族 1999年3月 山東濰坊人 本科學歷 中國石油大學華東在校生
3. 江翰鋒,男,漢族,1999年2月,河南新鄉人。本科學歷 中國石油大學華東在校生
4.通訊作者為 張國平 ,張國平,1992年石油大學(華東)計算機應用技術專業畢業留校任教,1998年晉升為講師,2001年石油大學(華東)計算機應用技術專業研究生畢業,2003晉升為副教授。工作期間主要參加計算機專業的教學和科研工作,先后主講了《操作系統原理》,《數據庫原理》,《面向對象程序設計——Java語言》,《Web數據庫》,《Unix系統環境》,《軟件工程》,《面向對象方法》,《UML語言》,《軟件設計實例分析》等多門計算機本科、研究生課程。現從事的主要研究方向有:信息系統與信息集成技術、數據庫與數據網格。[1]
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
