基于標準桿件的CRTSⅢ型軌道板自動化檢測系統精度評定
2019-10-28 06:42:10肖源淼葉昌堯包建強張獻州
鐵道勘察 2019年5期
肖源淼 葉昌堯 包建強 羅 超 陳 霄 李 圓 張獻州,2
(1. 西南交通大學地球科學與環境工程學院,四川成都 611756;2. 西南交通大學高速鐵路運營安全空間信息技術國家地方聯合工程實驗室,四川成都 611756;3. 中鐵二十二局集團有限公司,北京 100043)
20 世紀60 年代,高速鐵路開始在世界范圍內發展,其中具有代表性的有德國高速鐵路、日本新干線以及法國TGV[1]。 21 世紀初期,我國通過引進、消化和再創新,自主研發了CRTSⅢ型軌道板。 CRTSⅢ型軌道板具有諸多優良特性[2-4]:①結構簡單,節省材料;②調整層采用自密實混凝土,提高了結構耐久性和環境適應性;③可通過模具調整適應曲線線形,避免了軌道板打磨,減少了精調時扣件的調整量;④軌道板為先張法雙向預應力結構,抗裂性優于Ⅱ型板;因有擋肩結構,保持軌距和線形的能力亦優于Ⅰ型板。 因此,在未來的高速鐵路建設中,CRTSⅢ型軌道板將作為主要板型。
CRTSⅢ型軌道板是承載鋼軌的基礎,其相關尺寸精度與軌道的鋪設安裝有著直接的聯系。 為了確保軌道板符合精度要求,在出廠投入使用前,都必須經過各項嚴格的檢測[5]。 目前,CRTSⅢ型軌道板外形尺寸出廠檢驗的檢測參數有19 項,其中11 項要求全檢[6]。
在國外,多采用全站儀和相關檢測儀器對軌道板外形尺寸進行檢測,然后利用精密數控機床對不符合要求的部位進行打磨或填補,使軌道板在鋪裝前符合精度要求。 近年來,國內許多學者和研究機構對軌道板的檢測技術進行了系統的研究,并產生了諸多理論成果和專利[7]。 如薛峰[8]利用線陣圖像技術,提出了基于圖像檢測的移動測量方案。 許磊[9]提出了一種基于激光跟蹤和手持激光掃描組合技術的軌道檢測方法。 范生宏[10]研發了高鐵軌道板快速檢測系統,實現了包括圖像采集、圖像掃描、自動匹配、平差計算、CAD分析和報告自動生成等功能。 西南交通大學等研發了一種高速鐵路CRTSⅢ型軌道板自動化檢測系統,大大提高了軌道板檢測的效率。 但目前尚無對該類型軌道板自動化檢測系統進行精度評定的技術標準。
為了對高速鐵路CRTSⅢ型軌道板自動化檢測系統進行精度評定,驗證其可靠性和精確性,基于相關規范[11-12],提出了一種基于標準桿件的CRTSⅢ型軌道板自動化檢測系統精度評定方法。
1 精度評定原理
1.1 標準系統精度和標準偶然精度的引入
文獻[13]所提出的光學測量系統檢測標準的衡量指標主要是圍繞長度來判定,但忽視了系統誤差和偶然誤差的影響,在評價檢測系統的魯棒性方面做得不夠全面。
以集成智能機器人和三維成像儀的高速鐵路CRTSⅢ型軌道板自動化檢測系統為依托,假設該系統使用不同的方案組ym(m=1,2,…,l)作精度測試,以每組測量值作為一個子系統,每組的測量物理量由xi(i=1,2,…,n)個組成;分別對其作多次等精度的獨立測量(以mm 為有效單位),可得出其算術平均值

由貝塞爾法可知[14],每組測量標準差的估計值為

上述m 個方案組,其方差表達式為σ2m(m=1,2,…,l),有

式中:Pm(m=1,2,…l),為對應方案組ym(m=1,2,…,l)的權。 對于一組觀測值,其權之比等于相應方差倒數之比。 這表明,方差越小,其權越大;或者說精度越高,其權越大。 權可以作為比較觀測值之間精度高低的指標。
從每組測量值中篩選出最大值max(xm)和最小值min(xm),有


式中:ˉxm(m=1,2,…,l)為第m 組的平均值,(m=1,2,…,l)代表第m 組測量的真值。
將極差和平均差分別單獨除相應組的測量平均值,有
式中:ysysx
m (m=1,2,…,l)表示第m 組的系統相對誤差(子系統的系統相對誤差);(m=1,2,…,l)表示第m 組的偶然相對誤差(子系統的偶然相對誤差)。
綜合考慮各子系統評價指標和權重,把待測系統作為一個新系統,有
式中:χsysxz代表測量系統的系統相對精度;χouxz代表測量系統的偶然相對精度。
為了對比不同待測物體的精度,可將其統一為一個標準,如歸并到1.0 m 長度來計算比較,有
1.2 標準精度的計算方法
測量的不確定度一般包含若干個分量,其中一些分量(A 類)可用統計方法(如貝塞爾法、最大誤差法、最大殘差法、極差法和最小二乘法等)來評定,并可用實驗標準差si表征,其它分量(B 類)只能基于經驗或其它信息做評定。 可由假設分布的置信因子及估計的誤差限,求得近似標準差uj,A 類分量和B 類分量的合成仍應按方差合成原理進行[11],即

其中,β 為協方差項,即任意兩誤差間協方差之和。 由于相關系數的計算非常困難,應盡可能避開。設有兩個誤差σ1,σ2,合成后,有

式中,ρ1,2為相關系數,當兩誤差完全相等時 ,ρ=1;當兩誤差不相等時,ρ=0。
綜合得出

式中,χsysst為測量系統的標準精度,為每米數值上的毫米精度,為相關系數。
2 實例分析
根據上述的精度評定原理,對“集成智能機器人和三維成像儀高速鐵路CRTSⅢ型軌道板自動化檢測系統”的實際檢測數據進行了驗證分析。 利用一個長2.7 m 的尺子作為標準桿件,用自動化檢測系統測量該標準桿件的長度,并與標準長度進行對比,以檢驗該自動化檢測系統的檢測精度。
高速鐵路CRTSⅢ型軌道板自動化檢測系統精度評價由兩部分組成:軌道板扣件間距方向的橫向檢測精度和大鉗口方向的橫向檢測精度。 其中,扣件間距方向的橫向檢測精度包含了標準尺橫向放置于各承軌臺處標志圓的測量距離精度,共有8 組;大鉗口方向的橫向檢測精度包含了標準尺以軌道板為依靠、豎直放置于各承軌臺處標志圓的測量距離精度,共有9 組。扣件間距方向和大鉗口方向的測量值如圖1 和圖2 所示。 由圖1、圖2 可知,扣件間距方向10 次測量的結果與標準長度基本一致,大鉗口方向10 次測量結果的最大值與最小值之差在0.6 mm 以內,與標準長度趨于一致。
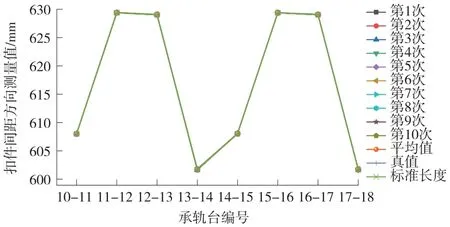
圖1 扣件間距方向測量值比較

圖2 大鉗口方向測量值比較
由式(1) ~式(8)可計算得到各類精度,成果如表1 和表2 所示。
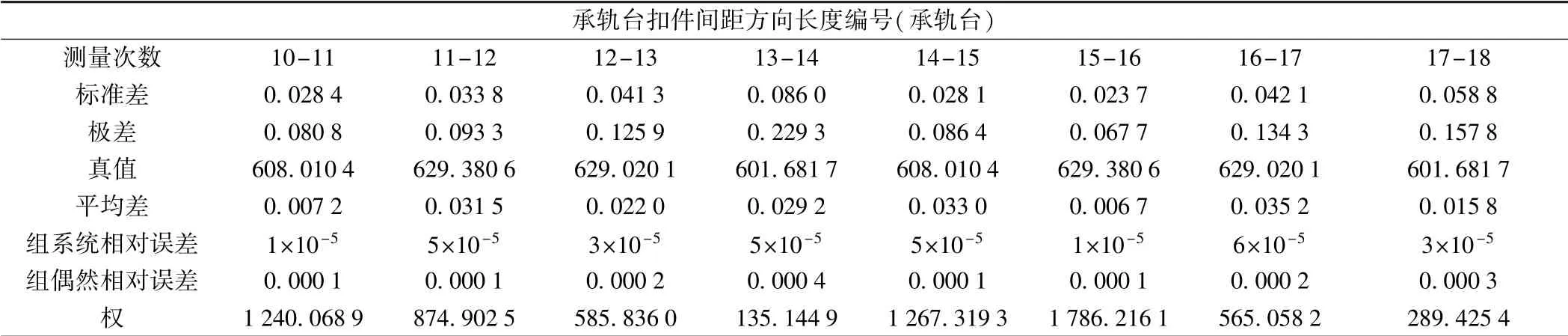
表1 扣件間距方向的檢測精度評定計算
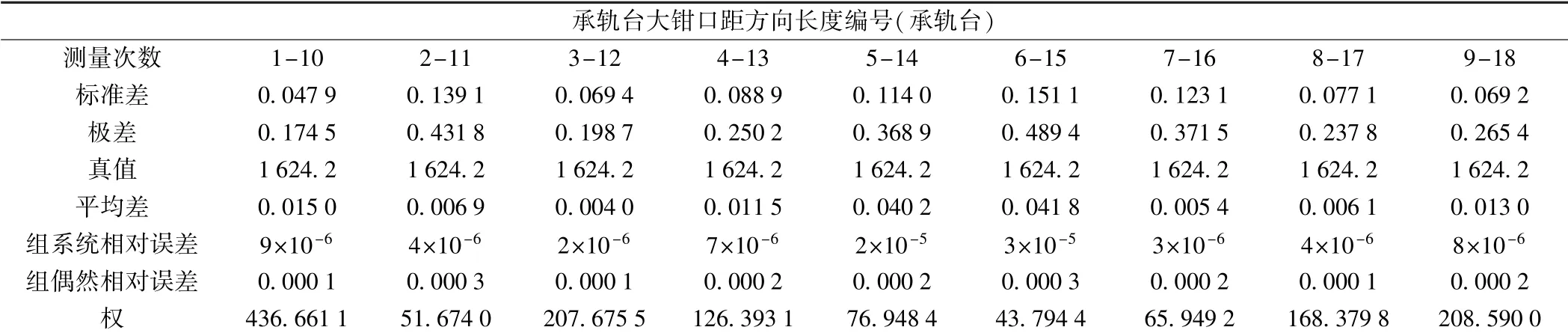
表2 大鉗口方向的檢測精度評定計算
根據表1、表2 以及式(7)可得,測量系統的系統相對精度χszysx為0.000 03 mm,偶然相對精度為0.000 152 8 mm。 根據式(8),可計算得出測量系統的標準系統精度為0.030 0 mm,標準偶然精度為0.152 8 mm。
系統相對誤差和偶然相對誤差兩者沒有必然的聯系[8](不相關、非線性)。 因此,可根據式(11)計算出高速鐵路CRTSⅢ型軌道板自動化檢測系統的標稱精度

某高鐵制板廠上萬塊軌道板的質量檢測實踐證明,該方法計算得到的精度評定結果真實可靠。
3 結論
(1)高速鐵路CRTSⅢ型軌道板自動化檢測系統的標準系統精度為0.030 0 mm,標準偶然精度為0.152 8 mm,標稱精度為0.155 mm/m。
(2)該精度評定方法考慮了系統誤差和偶然誤差的精度,可在較短時間內定量、全面地評價CRTSⅢ型軌道板自動化檢測系統的精度,也可為評價系統的魯棒性提供理論支撐。
(3)該精度評定方法不僅適用于CRTSⅢ型軌道板,還可用于對其他高速鐵路工程部件的檢測結果進行精度評定,具有廣泛的實際應用價值。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年8期)2019-05-09 02:22:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
