一種可自主折展電活性驅動元件的原理探究
2019-10-24 08:14:50杜聰聰付傲然吳海宇王志國
上海航天 2019年4期
杜聰聰,付傲然,吳海宇,王 皓,崔 凡,王志國
(1.上海交通大學 機械與動力工程學院,上海 200240;2.上海航天設備制造總廠有限公司,上海 200245)
0 引言
微納衛(wèi)星指質量介于10~100 kg 的衛(wèi)星[1]。隨著航天器發(fā)射低成本的要求和衛(wèi)星組網技術發(fā)展的推動,微納衛(wèi)星憑借體積小、功耗低及低成本等優(yōu)勢,成為當今航天領域研發(fā)熱點,逐步應用于氣象遙感、太空偵察等領域[2-3]。然而,衛(wèi)星尺寸的大幅度縮減對其能量供需和結構設計提出新挑戰(zhàn),需要采用功耗低、結構緊湊的驅動元件替代傳統(tǒng)的機械傳動機構,以完成微納衛(wèi)星的特定任務。
電活性聚合材料EAP 是一類在電場激勵下能發(fā)生特定大變形的新型材料,主要分為離子型和電場型[4],其中離子聚合物-金屬復合材料和介電彈性材料已得到初步應用。例如美國國家航空航天局采用離子型EAP材料驅動特性,實現空間儀表盤的除塵清理[5]。在微納操作領域,有研究者提出了微納操作樣機,能夠帶動末端探針實現二自由度運動[6],以及EAP 可作為微型CCD 相機柔性透鏡驅動元件[7]。利用離子型EAP材料作為電致動彎曲的驅動元器件,其應變甚至可達到40%[8],而導電聚合驅動電壓低,一般只需±0.1~2 V,能量轉化效率高。此外導電聚合物材料疲勞壽命長,氧化還原循環(huán)次數可達到106次[9]。
本文探索出一種可靠的離子型電活性聚吡咯聚合物材料的制備工藝,測定新材料的相關性能,并得到實驗驗證。基于該材料制備了具有特定形狀的電活性驅動元件。利用該驅動元件,設計了在外電場作用下具有一定運動能力的機構,并制作了實驗樣機。
1 材料制備與結構特性
1.1 材料制備
離子型電活性聚吡咯(IEAP)材料內部為對稱三明治夾心結構,中間為疏水性聚偏二氟乙烯(Polyvinylidene Fluoride,PVDF),兩側由外向內依次為聚吡咯(Polypyrrole,PPy)和金箔(Au)。
聚吡咯電勢高(陽極)一側的膨脹和電勢低(陰極)一側的收縮使材料產生了橫向的壓力差,導致了材料整體向體積收縮(陰極)的方向彎曲,如圖1所示。在外界電場的作用下,通過IEAP 內部發(fā)生電化學的氧化還原反應造成了材料宏觀的彎曲變形,這種氧化還原反應的本質是導電聚合物的摻雜與脫摻雜過程。
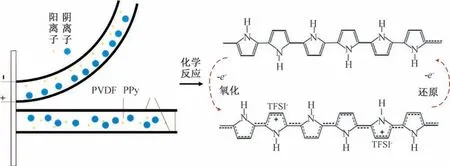
圖1 IEAP材料的驅動原理示意圖Fig.1 Schematic diagram of the principle of IEAP
為了增加材料表面的導電性和電容性,對聚吡咯表面進行鍍金,Au具有較好的延展性,適合驅動元件的大變形。另外,Au 作為惰性金屬,性質穩(wěn)定,不易發(fā)生化學反應,便于后續(xù)的電化學沉積。本文所采用的鍍金方案為電子束蒸發(fā)法,主要技術指標見表1。電化學工作站在制備過程中施加大小恒定的電流,實現電化學沉積聚吡咯。當正電位施加到電極時,不溶性的導電聚合材料(PPy)沉積在陽極處。本文制備IEAP 材料的環(huán)境示意如圖2所示。

表1 電子束蒸發(fā)系統(tǒng)主要技術指標Tab.1 Main technical indicators of electron beam evaporation system
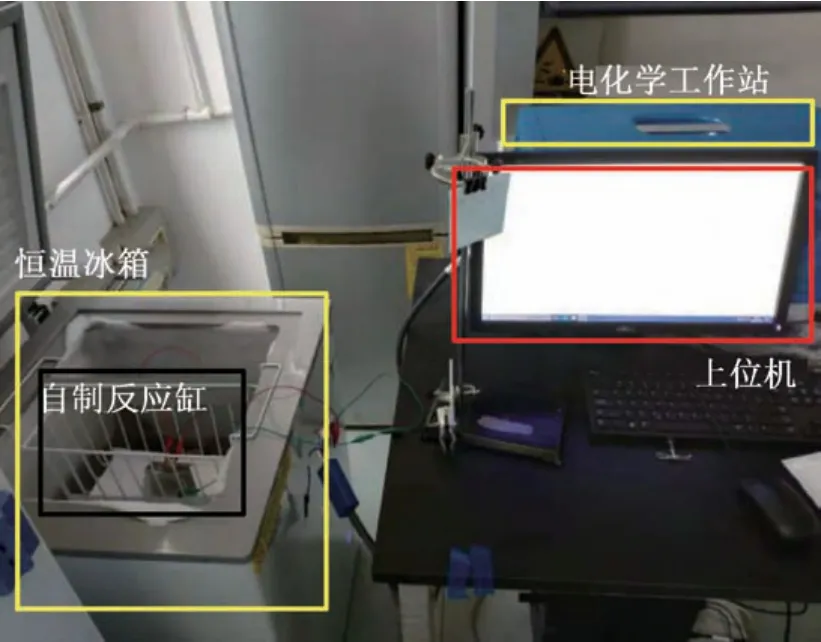
圖2 IEAP材料的制備環(huán)境Fig.2 Preparation environment of the IEAP
本文試件采用是三電極法制備,將電化學工作站正極接基底PVDF 兩側的鍍金層,負極接不銹鋼絲網,參比泡沫鎳電極浸入電解液中。將0.1 mol/L的吡咯單體與0.1 mol/L的Li+與TFSI-的混合溶液加入電解槽中。在-23 ℃的恒溫冰箱中冷卻30 min后,接入電流開始反應。恒流法制備有效反應面積為50 cm2,采用的電流恒定為5 m A,電流密度為0.1 m A/cm2。反應完成后,將樣品在溶液中浸泡30 min 后取出,剪取30 mm×5 mm 和30 mm×10 mm 兩種矩形長條樣品作為IEAP驅動元件。
1.2 結構表征
無水乙醇清洗去除驅動元件中含有的碳酸丙烯酯PC后,在45 ℃的真空環(huán)境下干燥處理12 h后,采用泰思肯公司(TESCAN)設計的MIRA3型號場發(fā)射掃描電子顯微鏡(scanning electron microscopy,SEM)來分析IEAPA 驅動器形貌特征。其中,電鏡在30 k V 下二次電子像分辨率為1.0 nm,在3 k V下為3.0 nm;電鏡的束流為2 p A~200 n A;探頭的面積為80 mm2;能量的分辨率為125 e V;元素檢測范圍為Be4-Pu94。
形貌特征如圖3所示,兩側為PPy層,中間多孔狀結構為PVDF 層,Au 薄膜厚度為納米級,和PPy,PVDF材料厚度不是一個數量級,故分界線不明顯。兩側PPy層厚度基本一致,但PPy層外表面仍存在不平整區(qū)域,一定程度上影響驅動元件的機械性能。根據驅動元件厚度方向的形貌特征,后續(xù)建模與有限元仿真中,驅動元件厚度方向尺寸為:驅動元件PPy 層厚度約為30μm,PVDF 層厚度約110μm,Au層厚度為70 nm。
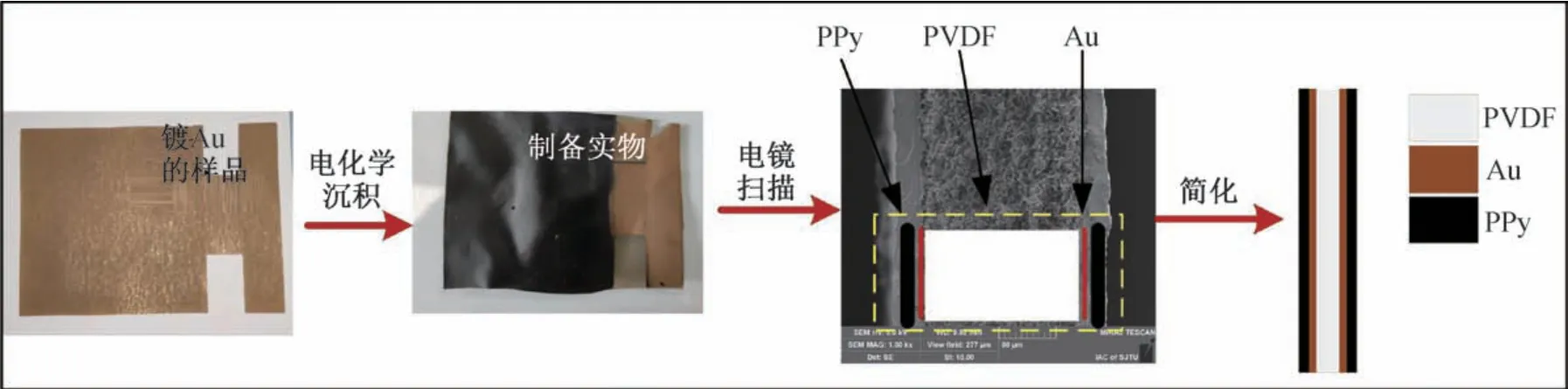
圖3 IEAP驅動元件厚度方向的形貌特征和結構Fig.3 Topographical features of the thickness direction of the IEAP
1.3 電致特性測試
對30 mm×5 mm 和30 mm×10 mm 兩種尺寸的IEAP驅動元件進行測試,對驅動元件兩端施加方波電壓,記錄通過驅動元件的電流和電荷量隨時間變化的曲線,及驅動元件的位移曲線,測試環(huán)境如圖4所示,其中圖的左半邊是測試所必需的硬件,右半邊是測試信號的波形圖,分別代表3個周期的電壓、電流和電荷量的數值變化。
在2種不同幅值的方波電壓下,測試2種不同寬度(5/10 mm)驅動元件的響應。以30 mm×5 mm的IEAPA 驅動器的測試過程為例,測試的參數如下:施加的方波電壓周期為60 s,幅值為0.2 V,測得通過驅動元件的電流以及兩端電荷量隨時間變化如圖4的右部分所示。為了描述驅動元件的特性,從方波電壓剛開始變化的時刻為0時刻開始計時,到下一次電壓反轉之前的這半個方波周期內,驅動元件位移達到穩(wěn)態(tài)的時間t x為

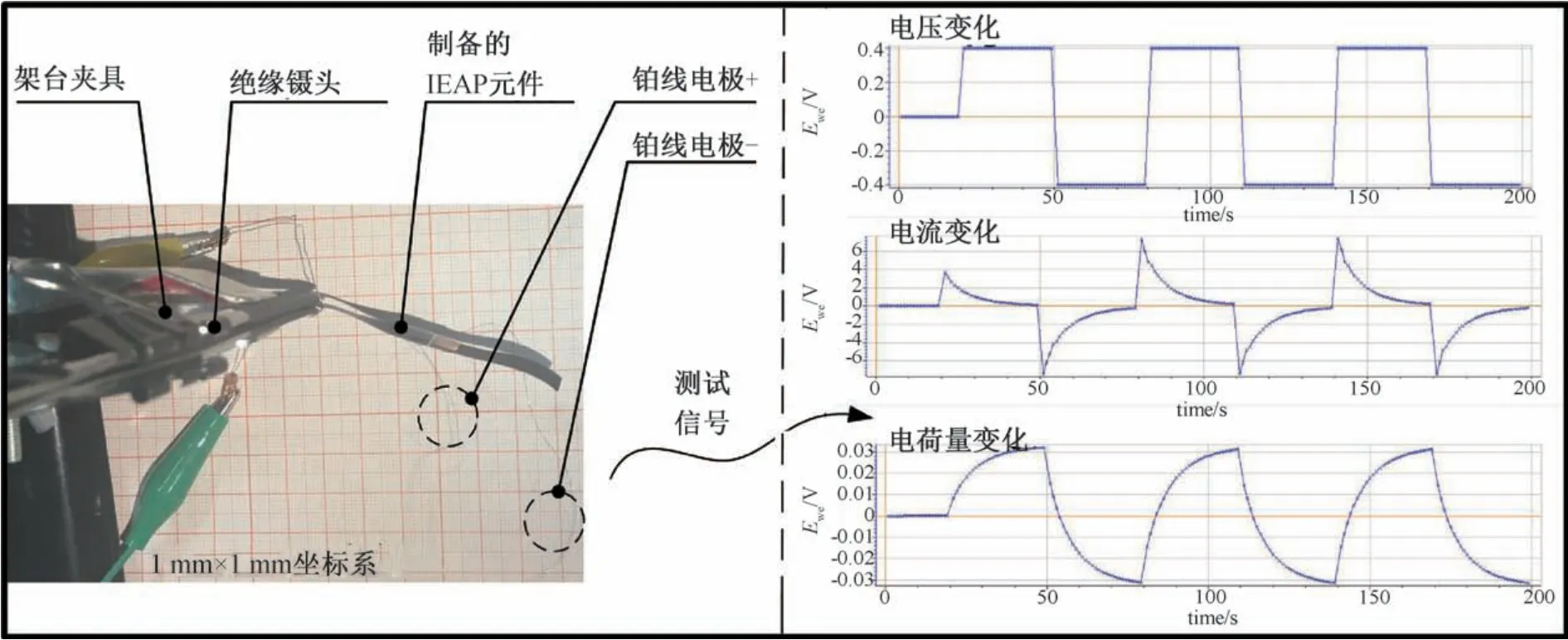
圖4 IEAP驅動元件的測試環(huán)境Fig.4 Test environment of the IEAP
式中:x t為t時刻的驅動元件末端垂直方向位移;x0和x0.5T分別為0時刻和0.5T時刻的驅動元件末端垂直方向位移。
在一個電壓變化周期內,4組測試的驅動元件的位移隨時間變化關系,如圖5所示。由圖可知:同一驅動元件,輸入方波電壓的幅值越大,則驅動元件的達到穩(wěn)態(tài)電流所用的時間越長,達到穩(wěn)態(tài)位移所用時間越短;輸入同幅值的方波電壓,驅動元件的面積越大,驅動元件充放電的電流也越大,達到穩(wěn)態(tài)電流所用的時間幾乎沒有變化,但達到穩(wěn)態(tài)位移所用時間變長。
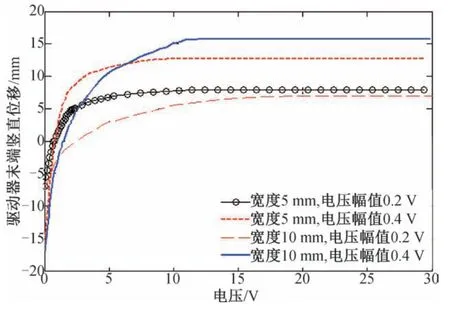
圖5 4種情況下驅動元件末端垂直方向位移對比Fig.5 Comparison of vertical displacement of the end of the driving element in four cases
2 模型假設與參數標定
2.1 模型假設與邊界條件
1)Au層厚度70 nm,遠小于PVDF 層的厚度110μm 與PPy層的厚度30μm,仿真中忽略不計Au層對IEAP驅動元件結構剛度影響。
2)在一定電壓范圍內,驅動元件的PPy 層因電壓產生的應變與電壓大小呈線性相關[10]。相關研究表明:PPy彈性模量與電壓值正相關,值介于20~180 MPa[11]。簡化建模,本文設定PPy彈性模量在-0.5~0.5 V 的外界電壓下為常數。
3)驅動元件的熱-結構等效模型中,PVDF層的熱阻遠大于PPy層熱阻,其中熱阻反映導熱材料對熱流傳導的阻礙能力,這保證有限元分析中驅動元件上下面之間是不發(fā)生熱傳遞,兩端加載恒溫邊界條件,保證整個PPy層溫度和加載的溫度一致。
4)溫度場是關于空間和時間的函數,是一種多維的非穩(wěn)態(tài)溫度場。本文主要研究驅動元件的穩(wěn)態(tài)響應,將溫度場簡化只與空間有關。
2.2 熱力學等效模型
在有限元分析軟件中,并沒有能夠直接解決制備的驅動元件所對應數學模型的功能塊[14]。但有限元軟件中包含了基于熱彈性理論的熱-結構耦合分析,可以用熱應變來等效電壓應變,溫度場來等效電壓場,熱膨脹系數來等效電壓膨脹系數。基于熱力學等效模型的理論,構建了本構方程所需的性能參數,從而能夠分析材料力電耦合過程[12]。針對驅動元件的溫度場分布,可將驅動元件作為一個沒有質量交換只有能量交換的封閉系統(tǒng),系統(tǒng)中能量遵循熱力學第一定律[13],即

式中:Q為流入系統(tǒng)的熱量;W為系統(tǒng)對外界所作的功;ΔU為系統(tǒng)的內能增量;W K為系統(tǒng)的動能增量;W E為系統(tǒng)的勢能增量。
在上述的系統(tǒng)能量中,并不考慮系統(tǒng)對外做功,同時認為系統(tǒng)中的勢能和動能并無變化,則有W=W E=W K=0,得Q=ΔU。對于封閉系統(tǒng),流入系統(tǒng)的熱量等于系統(tǒng)內能的增量。將其劃分為微小單元來描述其熱量傳遞過程,根據傅里葉導熱定律,系統(tǒng)內部的熱量傳導用熱傳導微分方程來描述。由于系統(tǒng)內無內熱源,故系統(tǒng)上的內熱源q v=0。同時認為材料的導熱系數是各項同性,則有

式中:λx,λy,λz分別為空間3 個方向上的導熱系數。進一步簡化為拉普拉斯方程,即
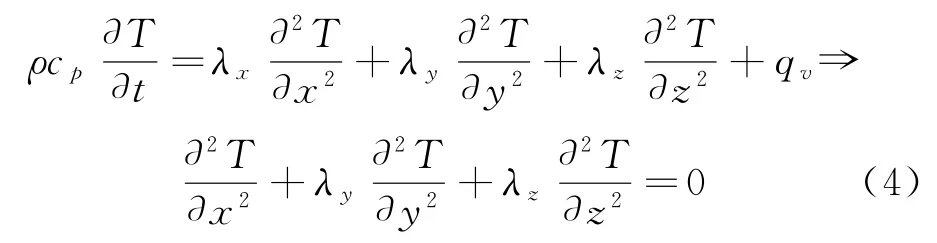
式中:T=T(x,y,z)為系統(tǒng)內部瞬態(tài)溫度場;ρ為系統(tǒng)材料的密度;c p為系統(tǒng)材料比熱容。
當系統(tǒng)內有多種材料時需劃分為若干個子系統(tǒng),其中每個子系統(tǒng)的溫度分布均滿足拉普拉斯方程。再通過每個子系統(tǒng)之間的溫度邊界條件進行整體分析。已知穩(wěn)態(tài)時刻系統(tǒng)邊界面上的溫度值作為第一類邊界條件,即:T|s=T|w。其中,T|S表示系統(tǒng)某一邊界面上的溫度值,T|w為給定的溫度值。在本研究中,將驅動元件兩端的電壓ΔV=1 V等價為ΔT=1 K[12],對邊界條件做出的等價。在兩端施加1 V 的電壓,相當于在驅動元件模型的兩端添加2個第一類邊界條件,且上下兩端的溫度的差值為1 K。由于驅動元件由多種材料組成,宏觀上每種材料的電阻不同,故等效為傳熱模型后表現為每種材料的導熱系數不同。將總的系統(tǒng)分為若干個具有單種材料的子系統(tǒng)后,不同子系統(tǒng)具有不同的導熱系數。每個子系統(tǒng)之間若具有交接面,則交接面上邊界條件需滿足

式中:λ1,λ2分別為系統(tǒng)1和系統(tǒng)2的材料的導熱系數。
基于以上所述原理,描述了驅動元件兩側輸入電壓與驅動元件靜態(tài)響應之間關系。圖6所示是標定材料參數的流程圖,首先是將材料的模型簡化得到理想的幾何模型,然后通過熱力學等效將電場對應到溫度場。最后,將實際測得的多組驅動元件的力學響應,用于指導ANSYS 18.2有限元軟件仿真中參數的標定,經過調整參數使得實驗與仿真的響應結果相吻合。需要注意的是,所標定得到的數值不具有實際的物理含義,是在ΔT=1 K 等價為ΔV=1 V 的假定下,擬合得到的參數。通過以上標定,可得PVDF 的彈性模量EX1=5.81 MPa,PPy的彈性模量EX2=12.1 MPa,電壓膨脹系數β=α=0.25。
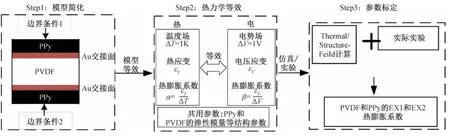
圖6 熱-結構耦合模型等效分析示意圖Fig.6 Schematic diagram of thermal-structural coupling model
通過該方法得到的參數,用于驅動元件在-0.5~0.5 V 電壓載荷下,在ANSYS有限元軟件進行有限元仿真,所得的位移變化結果與實際驅動元件測試的位移結果有著較好的擬合效果,如圖7所示。實驗和仿真的位移數據最大誤差為13.1%,平均誤差為9.3%,說明了使用該等效模型法描述PPy驅動元件的電-機械響應的準確性。
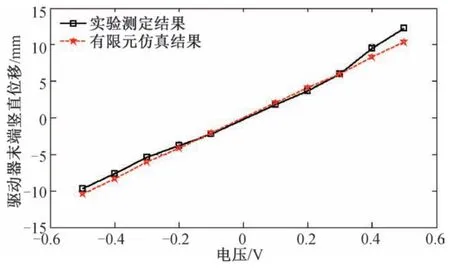
圖7 有限元仿真與實際試樣的末端位移Fig.7 Displacement of finite element simulation and the actual sample data
3 單、雙自由度機構設計與分析
3.1 單自由度機構設計
遵循由簡到復雜的思路,先依據該驅動元件設計一種單自由度機構進行研究。本文使用線徑0.1 mm的鉑絲纏繞的薄銅片固定在驅動元件器的連接端,使用寬度為5 mm 的聚乙烯單面膠紙將2個驅動元件連接,側向布置在水平坐標紙上,忽略重力影響,連接示意如圖8所示。
在驅動器1,2兩端施加不同電壓,進行相應的實驗測定,實際位移和仿真對比如圖9所示。驅動器1兩端施加電壓為0.4 V,驅動器2兩端施加電壓為0.4 V,相應地,在仿真中等效條件為驅動器1,2兩端施加0.4 K 和0.4 K 的溫度載荷,實驗與仿真結果如圖9(a)所示。同理,驅動器1兩端施加電壓為0.4 V,驅動器2兩端施加電壓為-0.4 V,驅動器呈現S型,如圖9(d)所示。
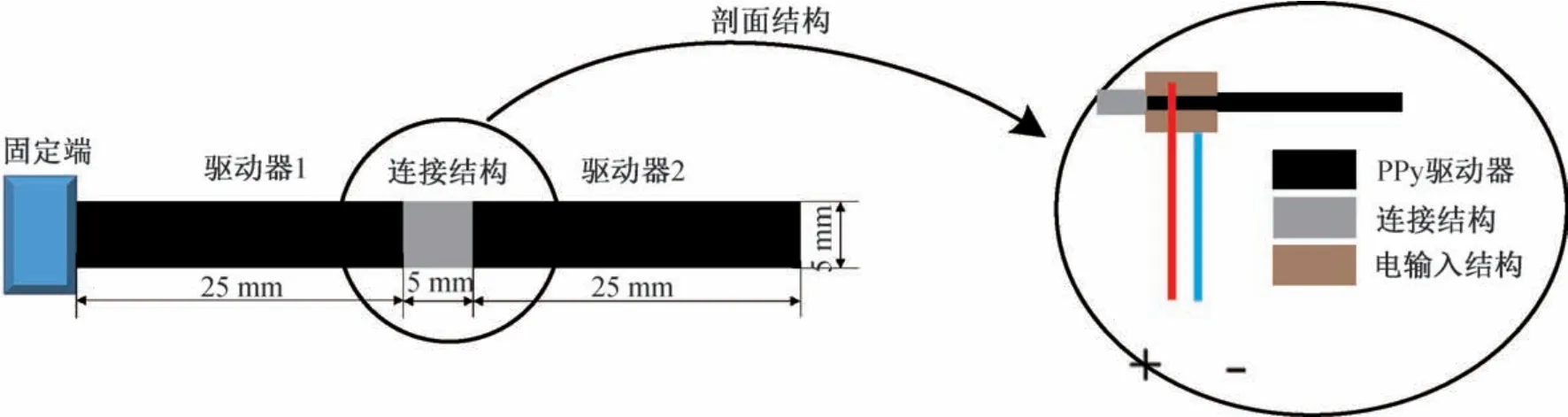
圖8 單自由度機構的設計Fig.8 Design of one-degree prototype
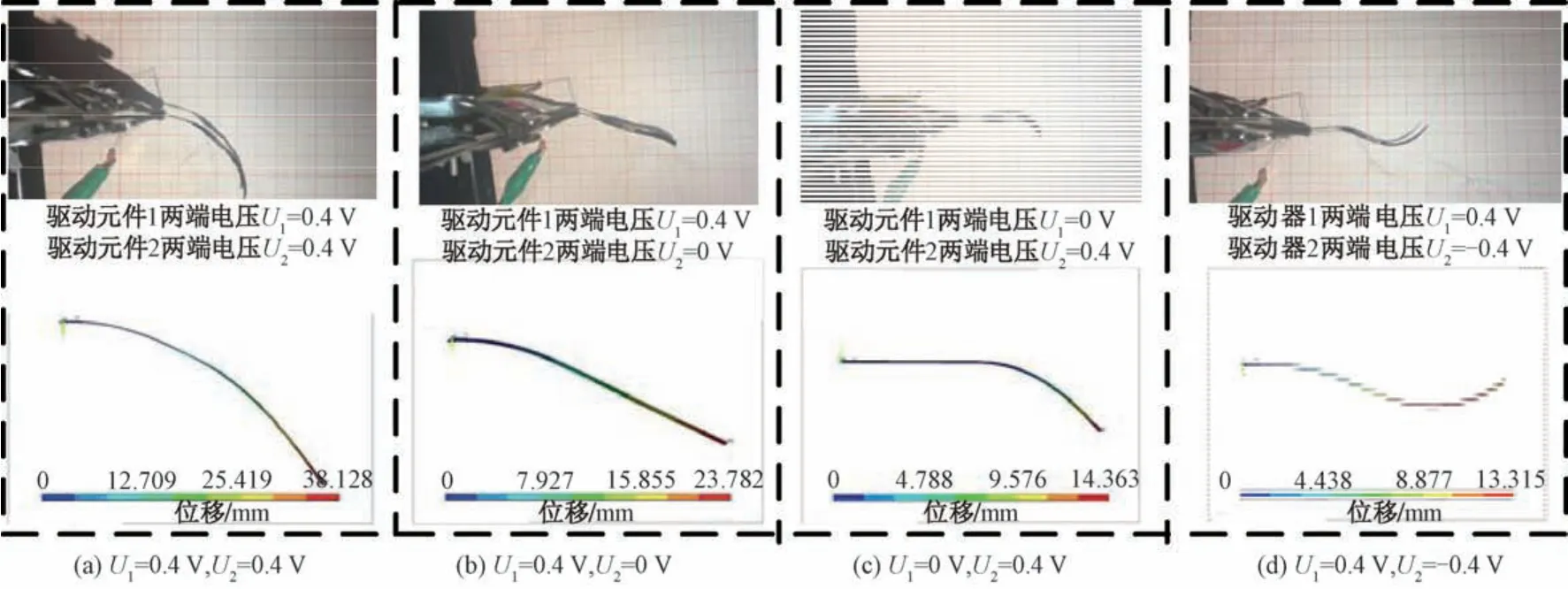
圖9 驅動元件1,2兩端施加不同電壓,樣機實際末端位移和仿真對比Fig.9 Prototype displacement comparison of experiment and simulation of different voltages
3.2 雙自由度機構設計
將4個IEAP 材料粘接在低剛度厚度為2μm聚乙烯薄膜表面,IEAP 兩側與小的銅片電極接觸并用鉑絲引出,如圖10所示,共有4個電壓輸入分別驅動4個IEAP 薄膜,通過電活性薄膜材料的彎曲和基底結構耦合約束來實現二自由度位移輸出,構成一種簡易二自由度機構。
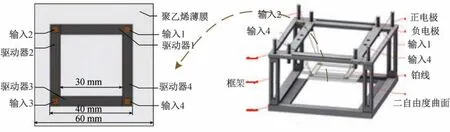
圖10 雙自由度機構設計圖Fig.10 Two-degree freedom test prototype
上述實驗結果如圖11所示。由圖可見,通過控制二自由度機構輸入電壓,可實現機構的末端位移按照特定指令進行改變,4種位型實驗與仿真結果對比,形狀趨勢大致擬合基本一致。但由于很多難以控制或消除的因素,如本身重力、所用聚乙烯薄膜剛度和所用鉑絲都會對機構的運動精度造成影響。
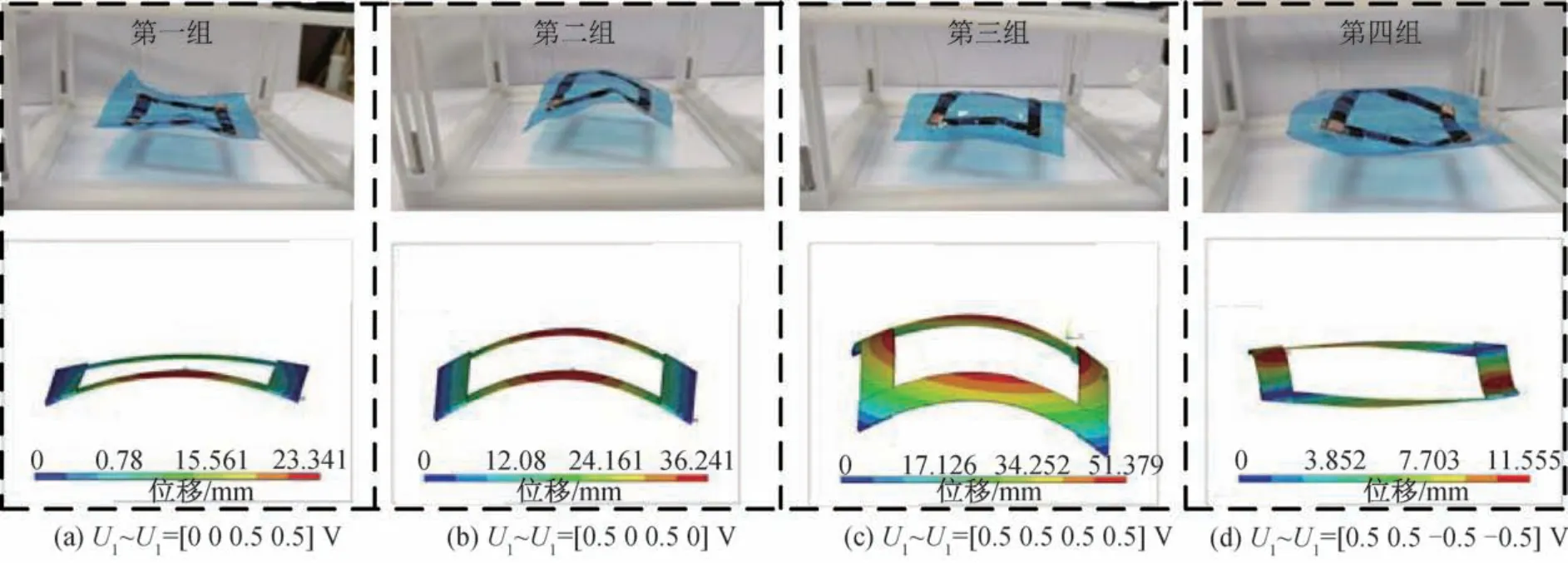
圖11 二自由度樣機施加不同電壓,實際位移和仿真對比Fig.11 Prototype displacement comparison of experiment and simulation applying different voltages
4 結束語
本文介紹了IEAP材料的恒流法制備工藝和材料電致大變形的電化學原理,通過電鏡形貌掃描定材料厚度方向的幾何參數。基于熱力學理論,對IEAPA 驅動器建立熱-結構耦合等效有限元模型,確定了模型的材料參數:PVDF 的彈性模量EX1=5.81 MPa,PPy 的彈性模EX2=12.1 MPa。在-0.5~0.5 V 輸入電壓下測試驅動元件的靜態(tài)電-機械響應,進一步設計了單、雙自由度機構并進行實驗,所得的實驗結果能較好與仿真結果相擬合。但由于受限于工藝手段和條件,對電-機械變形的標定帶來一定影響,實驗和仿真結果的最大誤差為13.1%。以單驅動元件為例,0.5 V 電壓下,驅動元件末端的最大位移為9.7 mm。今后可以嘗試對結構進行鏤空設計,在減小自重的基礎上,提高變形驅動的能力。該智能材料可應用于太陽能帆板折展和太空微小礦物質抓取等微操任務,由于舍棄復雜臃腫的機械傳動機構,因此在太空探索領域具有獨特優(yōu)勢和廣闊的應用前景。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:46
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學學報(2019年6期)2019-08-13 07:04:32
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
機械工程師(2015年10期)2015-02-02 01:14:03