一種大容性負(fù)載的壓電陶瓷驅(qū)動(dòng)電源設(shè)計(jì)
2019-10-22 09:27:18張文濤熊顯名
壓電與聲光 2019年5期
錢(qián) 存,張文濤,杜 浩,熊顯名
(桂林電子科技大學(xué) 廣西光電信息處理重點(diǎn)實(shí)驗(yàn)室, 廣西 桂林 541004)
0 引言
隨著光刻技術(shù)的迅速發(fā)展,所需定位精度經(jīng)微米級(jí)到亞納米級(jí),再由亞納米級(jí)至低于納米級(jí)的定位精度,納米級(jí)以下的定位已成為高精度定位的難點(diǎn)之一[1]。壓電陶瓷作為微定位系統(tǒng)的促動(dòng)裝置,具有分辨率高,剛度大,能耗低,溫度響應(yīng)小及無(wú)機(jī)械摩擦等優(yōu)點(diǎn),廣泛應(yīng)用于精密定位系統(tǒng)中。然而對(duì)于大容性的壓電陶瓷促動(dòng)器,其對(duì)電源性能的要求較高。常用的電源因?yàn)樵?shù)多,電路易發(fā)生振蕩,影響壓電陶瓷的線性位移控制,因此,大容性負(fù)載的壓電陶瓷驅(qū)動(dòng)電源的設(shè)計(jì)對(duì)光刻技術(shù)的發(fā)展有重要的價(jià)值。
1 驅(qū)動(dòng)電源結(jié)構(gòu)與指標(biāo)
1.1 驅(qū)動(dòng)電源結(jié)構(gòu)
圖1為壓電陶瓷驅(qū)動(dòng)電源[2]結(jié)構(gòu)。模擬信號(hào)生成電路:將微處理器(MCU)輸出的數(shù)字信號(hào)經(jīng)D/A轉(zhuǎn)換器(DAC)轉(zhuǎn)換為模擬信號(hào)后濾波;功率電源電路為各元件提供穩(wěn)定的電壓電流;濾波后0~5 V模擬信號(hào)經(jīng)線性穩(wěn)壓放大電路放大為0~100 V穩(wěn)定可控的電壓信號(hào),以驅(qū)動(dòng)壓電陶瓷。

圖1 驅(qū)動(dòng)電源結(jié)構(gòu)框圖
1.2 驅(qū)動(dòng)電源指標(biāo)
在微位移系統(tǒng)中,微位移的定位頻率為1 kHz,采用的壓電陶瓷促動(dòng)器型號(hào)為Pst150/3.5*3.5/7。等效靜態(tài)電容為0.35 μF,在最大驅(qū)動(dòng)電壓100 V時(shí)行程為7 μm,為使定位精度達(dá)0.3 nm,驅(qū)動(dòng)電壓輸出分辨率應(yīng)不大于4 mV。壓電陶瓷促動(dòng)器為容性負(fù)載,要求電源具有良好的瞬時(shí)電流驅(qū)動(dòng)能力[3]。壓電陶瓷等效電阻為
(1)
式中:f為微位移的定位頻率;CL為壓電陶瓷促動(dòng)器的等效靜態(tài)電容。此時(shí),驅(qū)動(dòng)電源所需峰值電流為
(2)
式中Umax為驅(qū)動(dòng)電源的輸出電壓最大值。
為使驅(qū)動(dòng)電源具有良好的動(dòng)態(tài)效應(yīng),其壓擺率應(yīng)大于電路所需值[4]。壓擺率ASR可由輸出電壓最大值和電壓最大頻率fmax得到,即
ASR=2πfmaxUmax=6.25(V/μs)
(3)
以上分析可得驅(qū)動(dòng)電源的基本指標(biāo):
1) 實(shí)時(shí)電壓調(diào)節(jié)能力(0~100 V)。
2) 輸出電壓頻率0~1 kHz。
3) 輸出電壓分辨率≤4 mV。
4) 輸出電流≥220 mA。
5) 壓擺率ASR≥6.25 V/μs。
2 容性負(fù)載及穩(wěn)定性分析
2.1 容性負(fù)載對(duì)穩(wěn)定性的影響
高精度定位系統(tǒng)中,驅(qū)動(dòng)電源應(yīng)具有良好的穩(wěn)定性與動(dòng)態(tài)性[5]。在運(yùn)算放大器中,由開(kāi)環(huán)曲線判斷系統(tǒng)的穩(wěn)定性能,如圖2所示。當(dāng)壓電陶瓷作為負(fù)載時(shí)會(huì)在開(kāi)環(huán)增益曲線上增加一極點(diǎn)fz,使曲線在極點(diǎn)處以二十倍頻下降,將會(huì)對(duì)電路的穩(wěn)定性造成影響[6]。
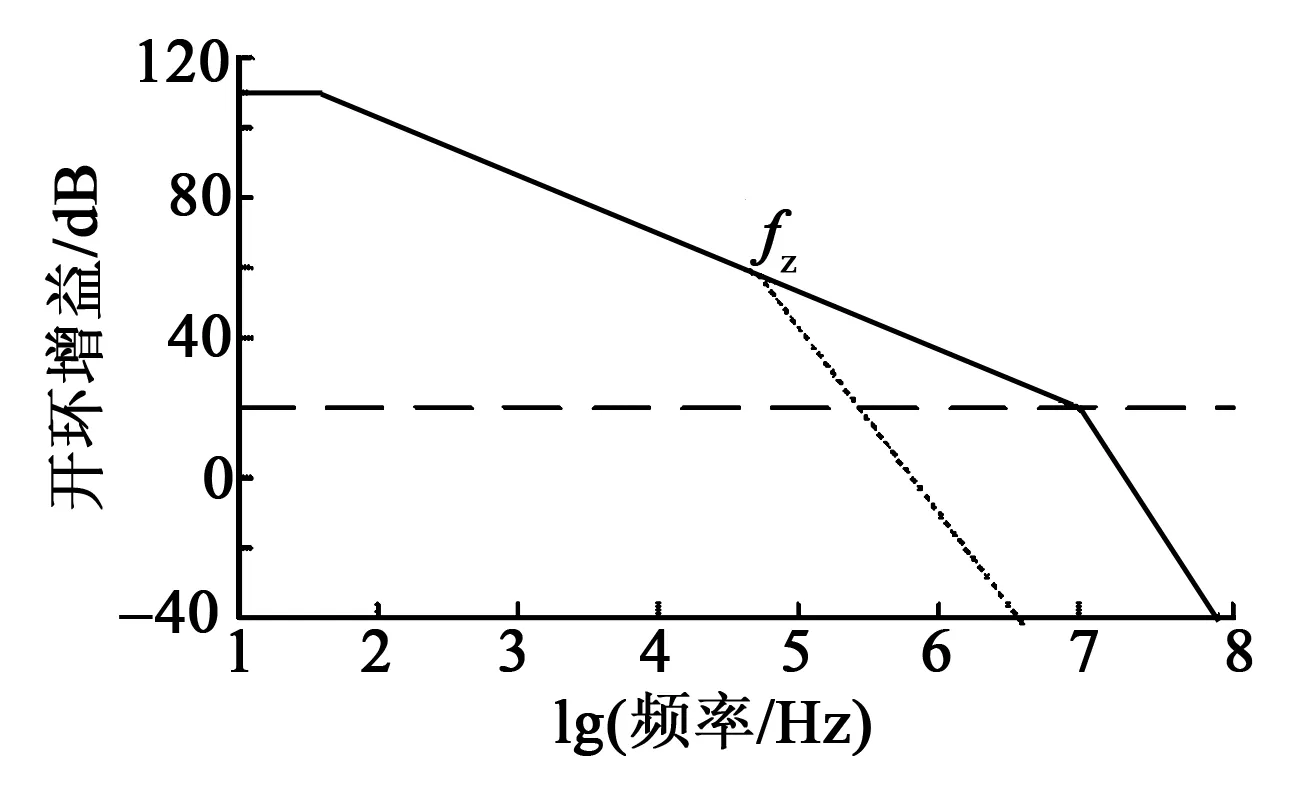
圖2 容性負(fù)載極點(diǎn)
壓電陶瓷促動(dòng)器作為動(dòng)能器件,具有較大的電容性[7],而大電容會(huì)使極點(diǎn)頻率變小,使二十倍頻曲線更早出現(xiàn),對(duì)電路危害極大。由壓電陶瓷的靜態(tài)電容CL和電源頻率可得極點(diǎn)的頻率為
(4)
極點(diǎn)在fz處開(kāi)環(huán)曲線以二十倍頻速率下降,其穿過(guò)20 dB的頻率小于1 MHz,系統(tǒng)將會(huì)發(fā)生震蕩,需要對(duì)系統(tǒng)進(jìn)行相位補(bǔ)償。
2.2 超前反饋補(bǔ)償
為解決容性負(fù)載對(duì)電路的影響,采用電容超前反饋對(duì)負(fù)載引起的極點(diǎn)進(jìn)行補(bǔ)償,其補(bǔ)償方式如圖3所示。圖中,Rf為隔離電阻,Cf為反饋電容,CL為壓電陶瓷等效電容,且CL=0.35 μF,R0為放大器的輸出電阻,且R0=7 Ω。

圖3 電容超前反饋
超前反饋與負(fù)載共同作用將產(chǎn)生1個(gè)零點(diǎn)fz1和1對(duì)極點(diǎn)fp1、fp2,分別為
(5)
(6)
(7)
令fz=fp1,零點(diǎn)和低頻極點(diǎn)抵消,可消除極點(diǎn)對(duì)電路的影響,此時(shí):
RfCf=(R1//R2)CL
(8)
取Cf=220 μF,Rf=10 Ω,R1=10 kΩ,R2=90 kΩ,得到電源系統(tǒng)的新極點(diǎn)為
(9)
當(dāng)fp大于系統(tǒng)的帶寬增益時(shí),即極點(diǎn)引起的開(kāi)環(huán)曲率下降位置晚于系統(tǒng)帶寬需求,此時(shí)系統(tǒng)開(kāi)環(huán)曲線在20 dB以上,系統(tǒng)穩(wěn)定。
2.3 運(yùn)放的相位補(bǔ)償
線性放大電路采用負(fù)反饋系統(tǒng),由于負(fù)反饋放大電路易發(fā)生相移造成振蕩,應(yīng)對(duì)線路進(jìn)行相位補(bǔ)償[8]。查PA92手冊(cè)可知,放大電路采用外接電容方式進(jìn)行相位補(bǔ)償。當(dāng)閉環(huán)增益不小于12 dB時(shí),采用10 pF的電容補(bǔ)償,系統(tǒng)增益將有2 MHz的帶寬,相位裕度約為60°,滿足電源設(shè)計(jì)需求。
3 放大電路設(shè)計(jì)
3.1 線性放大電路的選擇
線性放大需穩(wěn)定電壓和大電流輸出,選用PA92為運(yùn)放單元。PA92是APEX公司生產(chǎn)的一款輸出電壓可達(dá)390 V,輸出電流達(dá)4 A的高精度運(yùn)算放大器[9]。其大功率輸出能力適用于大容性負(fù)載的驅(qū)動(dòng)任務(wù),且PA92是運(yùn)算放大和功率放大相結(jié)合的產(chǎn)品,減小了體積,同時(shí)可安裝散熱裝置,使運(yùn)放能長(zhǎng)期穩(wěn)定工作。PA92運(yùn)放的失調(diào)電壓為10 mV。實(shí)際需求失調(diào)電壓為
(10)
式中:Re為驅(qū)動(dòng)電源分辨率;A為運(yùn)放放大增益。
PA92的失調(diào)電壓10 mV大于實(shí)際需求的最小失調(diào)電壓0.2 mV,單獨(dú)作用放大不能滿足精度需求,選用雙極放大結(jié)構(gòu)減小系統(tǒng)的輸入失調(diào)電壓[10],其結(jié)構(gòu)如圖4所示。

圖4 雙極放大電路
線性放大電路采用復(fù)合雙極放大負(fù)反饋電路。復(fù)合反饋雙極電路的失調(diào)電壓主要由前級(jí)運(yùn)放的輸入失調(diào)電壓決定[7],為降低線性放大電路的失調(diào)電壓選用高精度放大器OP07A作為驅(qū)動(dòng)電路的前級(jí)放大。OP07A最大失調(diào)電壓為25 μV,遠(yuǎn)小于所需的0.2 mV,滿足精度需求。
3.2 線性放大電路
圖5為驅(qū)動(dòng)電壓的線性放大電路。圖中,R1、R2、R3、R4為比例電阻,Rf、Cf分別為補(bǔ)償電阻電容,Cc為相位補(bǔ)償電容,C9為環(huán)路增益修復(fù)電容。在0~5 V模擬信號(hào)輸入下,OP07A將電壓放大1倍至0~10 V,后經(jīng)PA92放大10倍至0~100 V驅(qū)動(dòng)壓電陶瓷,線性放大電路的總放大增益為20。根據(jù)輸出電壓峰值由功率電源電壓決定[7],OP07A采用±15 V穩(wěn)壓電源得到輸出電壓峰值10 V,PA92采用+120 V、-15 V穩(wěn)壓電源,得到0~100 V的輸出電壓。RCL使用1 W高精密電阻,且
(11)
式中IL為功放限流值。采用3Ω功率電阻將電流限制在220 mA,滿足大電流輸出能力。

圖5 線性放大電路
4 電源驅(qū)動(dòng)能力測(cè)試
設(shè)計(jì)驅(qū)動(dòng)電源后,按照電源性能需求對(duì)性能進(jìn)行測(cè)試,以確定電源的線性度和靈敏性。因精密定位控制需要電源具有良好的階躍性能和動(dòng)態(tài)穩(wěn)定性,對(duì)驅(qū)動(dòng)電源的測(cè)試包括階躍響應(yīng)測(cè)試、動(dòng)態(tài)響應(yīng)和線性誤差測(cè)試。
4.1 階躍響應(yīng)測(cè)試
驅(qū)動(dòng)電源在高功率的輸出中,需要有良好的輸入、輸出線性比,因此需要對(duì)輸出電壓做階躍響應(yīng)測(cè)試。在頻率1 kHz使用驅(qū)動(dòng)電源時(shí),其階躍響應(yīng)應(yīng)小于1 ms。測(cè)試輸入信號(hào)在0時(shí)刻輸入1 V的階躍信號(hào),測(cè)得響應(yīng)電壓曲線如圖6所示。由圖可知,響應(yīng)電壓放大20倍,信號(hào)平穩(wěn)上升,達(dá)到20 V時(shí)曲線無(wú)超調(diào)。電源階躍響應(yīng)速度快,在100 μs內(nèi)達(dá)到穩(wěn)定狀態(tài),滿足驅(qū)動(dòng)設(shè)計(jì)要求。

圖6 驅(qū)動(dòng)電源階躍響應(yīng)
4.2 動(dòng)態(tài)響應(yīng)
驅(qū)動(dòng)電源動(dòng)態(tài)響應(yīng)性能影響其在高頻率使用下的電壓性能。在補(bǔ)償電容Cf定值下,需要對(duì)總環(huán)路電容C9進(jìn)行調(diào)節(jié)。C9使用合適的電容可使驅(qū)動(dòng)電源系統(tǒng)具有良好的動(dòng)態(tài)跟隨效果。
C9=150 pF時(shí),設(shè)定微處理器的輸出信號(hào)經(jīng)D/A轉(zhuǎn)換為1 kHz正弦信號(hào)后,其電壓峰值為0.5 V,直流偏置為0.5 V。測(cè)得電源的輸出波形如圖7所示。由圖可知,輸出電壓在0~20 V為平穩(wěn)正弦信號(hào),無(wú)相移,動(dòng)態(tài)跟隨效果良好,波形平滑。
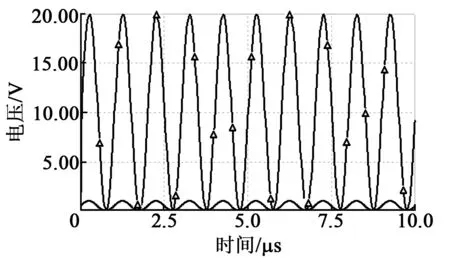
圖7 驅(qū)動(dòng)電源的動(dòng)態(tài)響應(yīng)
4.3 電壓輸出精度
為測(cè)試驅(qū)動(dòng)電源的電壓輸出精度,將0~5 V輸入信號(hào)設(shè)置為1 000頻點(diǎn)/s上升,得到輸入電壓與驅(qū)動(dòng)電源的輸出信號(hào)如圖8所示。由圖可知,系統(tǒng)輸出電壓的線性度良好,無(wú)波動(dòng)。
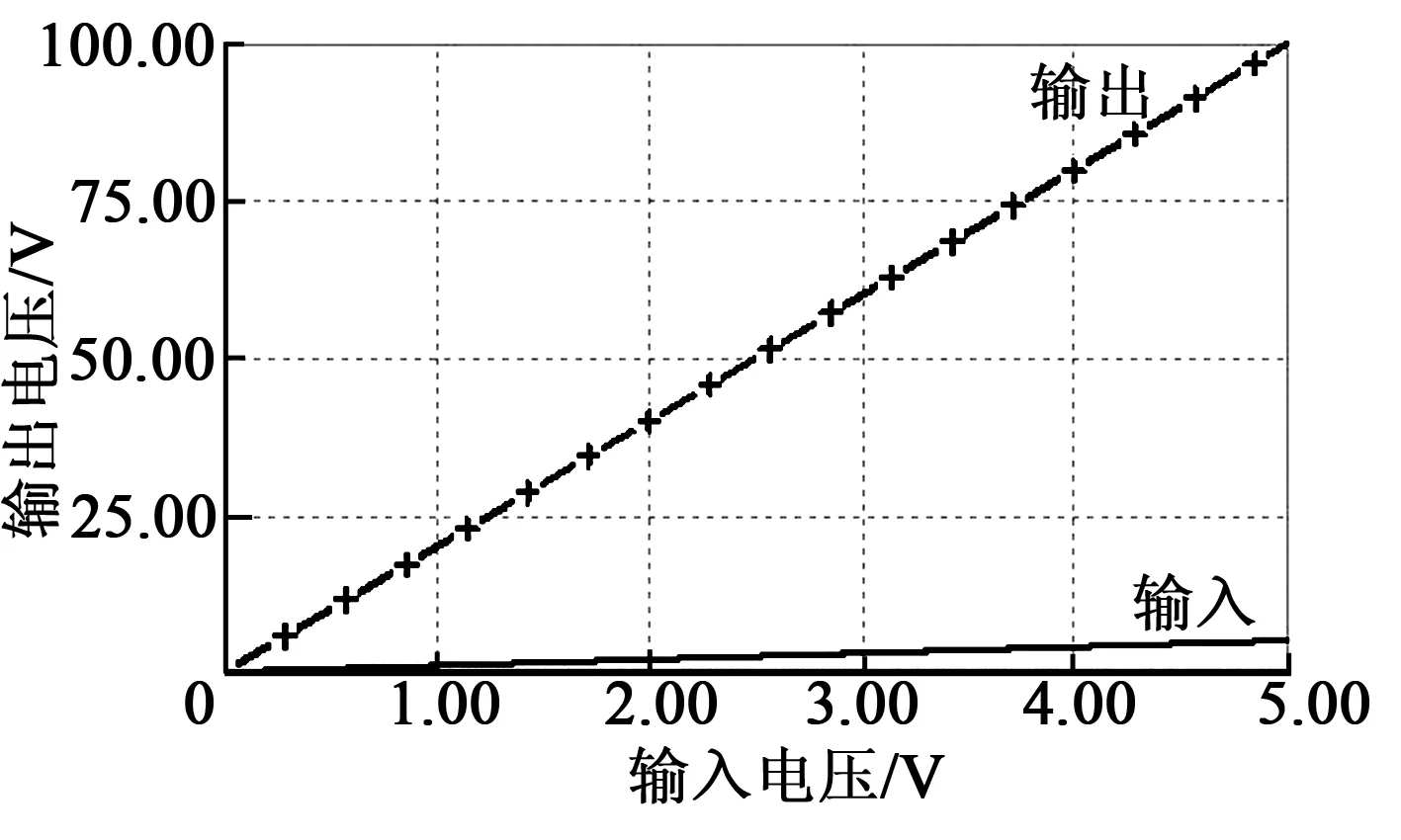
圖8 驅(qū)動(dòng)電源輸入輸出關(guān)系
為測(cè)量輸出電壓信號(hào)的線性誤差大小,對(duì)以上結(jié)果隨機(jī)抽取8組輸入電壓進(jìn)行測(cè)試,對(duì)其輸出電壓采用高精度電壓表測(cè)量,每組結(jié)果分10次進(jìn)行測(cè)量,取測(cè)量結(jié)果平均值,得到數(shù)據(jù)如表1所示。由表可知,在0~100 V輸出過(guò)程中線性度穩(wěn)定,且輸出電壓誤差均小于0.5 mV。
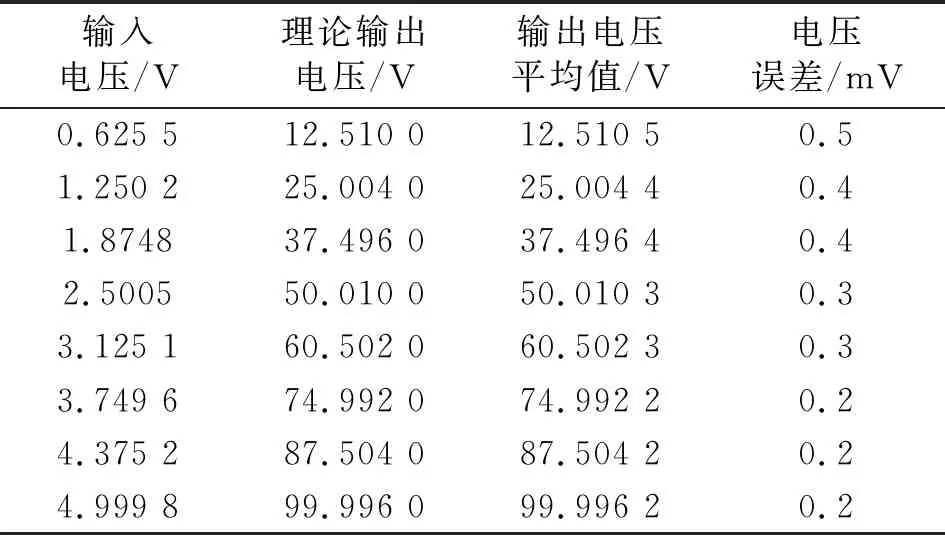
表1 輸出誤差測(cè)試
5 結(jié)束語(yǔ)
本文對(duì)大容性負(fù)載電路進(jìn)行穩(wěn)定性分析,對(duì)負(fù)載補(bǔ)償方式和影響動(dòng)能因素進(jìn)行分析,并對(duì)電源系統(tǒng)的高精度輸出能力進(jìn)行分析。提出了采用電容超前反饋與相位補(bǔ)償相結(jié)合的方式,采用雙極線性放大方法。經(jīng)過(guò)實(shí)驗(yàn)驗(yàn)證表明,電源系統(tǒng)具有良好的大電流驅(qū)動(dòng)能力,在輸出精度與動(dòng)態(tài)響應(yīng)上有良好的效果。驅(qū)動(dòng)電源精度穩(wěn)定,動(dòng)態(tài)響應(yīng)快,輸出電流大,滿足驅(qū)動(dòng)壓電促動(dòng)器在微位移系統(tǒng)中的應(yīng)用。
