一種機械式多穩態壓電俘能器及其特性研究
2019-10-22 09:27:14汪燦,謝進,馬戈,鄒政
壓電與聲光 2019年5期
關鍵詞:系統
汪 燦,謝 進,馬 戈,鄒 政
(西南交通大學 機械工程學院, 四川 成都 610031)
0 引言
從環境振動中收集能量為無線傳感器、便攜式電子設備等低功耗設備供能成為近年的研究熱點[1]。由于壓電俘能器具有能量密度高及結構簡單的優點,被廣泛用于振動能量的收集[1]。研究表明,非線性壓電俘能器具有比線性壓電俘能器更好的俘能性能[2-7],關于非線性雙穩態壓電俘能器已有大量的研究成果[2-3]。最近研究結果表明,三穩態壓電俘能器具有比雙穩態更好的低頻俘能性能[4-7]。文獻[4-5]利用2個可旋轉的外部磁鐵與固定在懸臂梁自由端的磁鐵形成三穩態系統。文獻[6-7]通過實驗和仿真證實了在隨機激勵下,三穩態系統也具有更好的俘能性能。
現有雙穩態系統和三穩態系統多數都是通過磁鐵來引入非線性恢復力。然而,在某些特殊應用場合,磁鐵產生的磁場或許對周圍環境產生影響,反之,周圍環境也會影響到俘能器的磁場,進而影響俘能器的性能[8]。因此,人們又提出了各種機械式的非線性俘能器結構。文獻[8]將線性俘能器用線性彈簧連接起來,形成單穩態的非線性俘能器;文獻[9]設計了一個懸臂擺的單穩態俘能器,通過擺的運動,引入非線性恢復力。文獻[10]將彈簧傾斜安裝在基座上,使彈簧與質量塊運動方向保持一定的角度,通過這種方式引入了非線性恢復力,形成雙穩態的非線性俘能器。
本文利用一種具有多穩態特性的機械結構作為俘能器。分析了其系統參數與結構穩態間的關系,并利用數值仿真法研究了在簡諧激勵和隨機激勵下系統的俘能特性。
1 系統的物理和計算模型及穩態分析
1.1 系統的物理和計算模型
本文提出的多穩態結構俘能器的物理結構如圖1(a)所示。2根線性彈簧對稱布置于懸臂梁未發生變形時平衡位置的兩側。當無外部激勵時,懸臂梁靜止,兩彈簧處于壓縮狀態。在懸臂梁上、下兩側各粘結一層寬度和長度與懸臂梁均相同的壓電片。當基座在外部激勵下發生振動,使得懸臂梁產生變形,導致壓電片發生變形,由壓電片的壓電效應可實現振動能向電能的轉化。
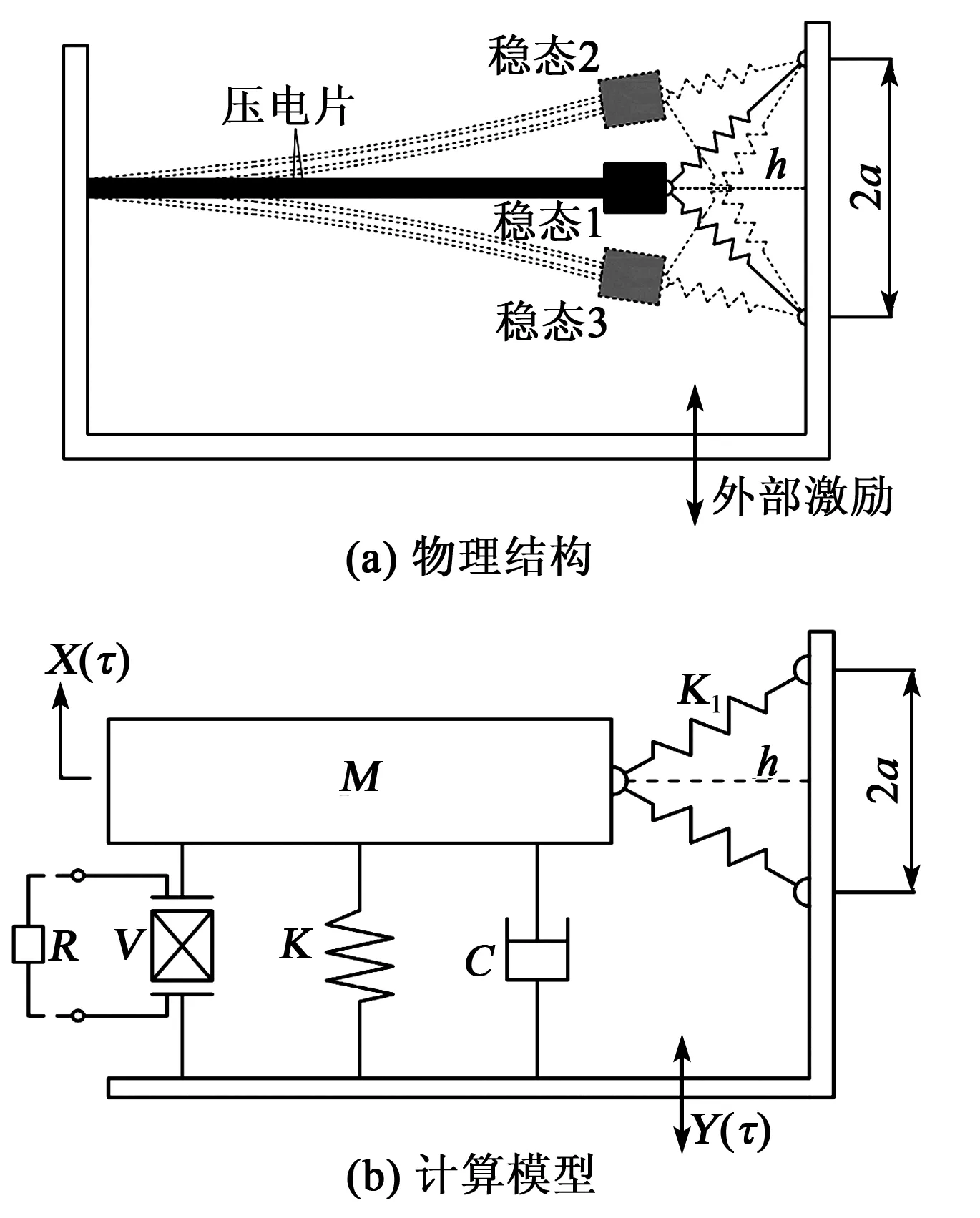
圖1 機械式多穩態俘能器的物理結構及計算模型
圖1(a)所示物理結構可利用集中參數法將懸臂梁簡化成典型的彈簧阻尼系統,如圖1(b)所示。圖中,M、K和C分別為系統的等效質量、等效剛度和等效阻尼,K1為兩線性彈簧的剛度系數,R為負載電阻,V為懸臂梁的輸出電壓,h為懸臂梁末端距右端基座的垂直距離,2a為兩線性彈簧在基座上的距離,X(τ)為懸臂梁的振動位移,Y(τ)為外部激勵。
由壓電本構方程、牛頓第二定律和基爾霍夫定律,可得系統的動力學方程[11]為
MX″+cX′+KX+F1-θV=-MY″
(1)
(2)
式中:CP為等效電容;θ為機電耦合系數;F1為兩線性彈簧力在豎直方向上的分力;X,Y分別為X(τ),Y(τ);X′為X對τ的微分。
根據線性彈簧的位置和幾何關系可得

(3)
式中L為彈簧原長。
(4)

(5)

(6)
1.2 系統勢能函數及穩態分析
由式(4)可得系統的無量綱勢能函數為

(7)
勢能函數的最小極值點對應系統的穩定點,每個穩定點對應系統的一個穩定狀態(穩態)。
由式(7)可看出,系統的穩態數目與剛度比μ、彈簧的位置參數α、β有關。分別取μ=0.1、0.25、1、4、10,得到系統的穩態隨著α、β的變化而變化的規律,如圖2所示。
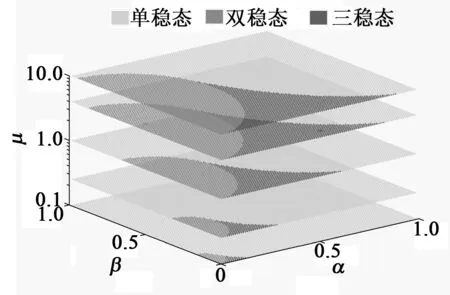
圖2 系統穩態特性參數分布圖
由圖2可看出,系統可產生1個穩定點的單穩態、2個穩定點的雙穩態和3個穩定點的三穩態。隨著μ的增大,系統產生多穩態的參數區域也將增大。
為了更直觀地了解參數μ、α、β對勢能函數及穩態數目的影響,取α=0,β=0.8,μ=1、4、10,作出勢能函數變化圖,如圖3(a)所示。由圖可見,當μ=1時,系統為單穩態;當μ=4和μ=10時,系統為雙穩態,μ值越大,則勢能U的最小值與最大值之差(即勢壘)越大,兩勢能U最小值之間的間距(即勢阱間距離)略微增加。

圖3 勢能函數與系統參數之間的關系
再取μ=1,β=0.2,α=0.1,0.3,0.8作出勢能函數變化圖,如圖3(b)所示。由圖可見,當α=0.1時,系統為雙穩態;當α=0.3,系統為三穩態;當α=0.8,系統為單穩態。由圖還可看出,與雙穩態相比,三穩態系統具有更低的勢壘,這意味著三穩態系統更易越過勢壘做大幅阱間運動。參數β對勢能函數及系統穩態數目的影響與參數α類似。
2 俘能器的俘能特性
根據文獻[12]可知,系統的輸出功率與均方根電壓的平方成正比,本文以無量綱均方根電壓作為系統俘能效果的評價指標,無量綱均方根電壓為
(8)
式中:vi為無量綱離散輸出電壓值;n為離散電壓取樣點數。
3 簡諧激勵下俘能器的運動與俘能特性
設外激勵為簡諧激勵,即

(9)
由文獻[5,13-14]可知,對于不同的壓電俘能器結構,激勵幅值大小對壓電俘能器俘能性能的影響基本一致,即隨著激勵幅值的增大,壓電俘能器的輸出電壓、工作帶寬均隨之增加。故此重點研究激勵頻率對系統的影響,取無量綱激勵幅值f=0.4。
取系統參數ξ=0.05,γ=0.5,λ=0.05,μ=1,β=0.2。為了比較系統在各種穩態下的俘能效果,取α=0.1、0.3、0.8,分別對應系統出現雙穩態、三穩態和單穩態的情況,采用龍格-庫塔法對式(6)進行數值求解。若無特殊說明,初始值均為[0 0 0]。
文中,我們主要介紹比特幣系統中涉及的相關密碼技術,包含簽名、哈希函數以及區塊鏈技術。尤其是區塊鏈技術,以鏈狀結構存儲數據,以密碼技術為數據傳輸提供機密性和認證性服務,從而形成一條分布式存儲、無法篡改、永無止息的數據庫。但比特幣等諸多數字貨幣在一定程度上具有匿名性,使得監管問題日益嚴峻,如何在保護實體隱私的同時實施有效的監管是數字貨幣領域的一大挑戰。另一方面,由于區塊鏈技術能擺脫第三方機構制約,使得它不再局限于數字貨幣領域。目前,區塊鏈技術在金融服務、公共服務和IoT等領域的應用尚處于探索階段,有待進一步發掘。
Ω=0.2時,系統對應3個不同α時的時域圖和相圖,如圖4所示。由圖可見,當α=0.3時,系統做大幅阱間運動,而α=0.1、0.8時系統只做小幅阱內運動。

圖4 Ω=0.2時系統響應圖
Ω=1時系統的時域圖和相圖如圖5所示。α=0.1、0.3時系統能越過勢壘保持大幅周期運動狀態,而α=0.8時系統只在其平衡點附近做小幅周期運動。

圖5 Ω=1時系統響應圖
Ω=1.8時,與Ω=1時的情況相反,α=0.1、0.3時系統保持小幅運動,而α=0.8時系統做大幅周期運動,如圖6所示。
現對不同穩態下系統的俘能特性進行討論。
系統處于雙穩態的α=0.1時,系統隨激勵頻率變化的Vrms和位移絕對值最大值|x|max如圖7所示。由圖可看出,在頻率較低時,盡管|x|max較大,但系統俘能特性不穩定。由圖4~6可看出,此時系統被限制在勢阱內做小幅阱內運動,雖然振動位移大,但俘獲電壓較小。而當外激頻率增加時,系統均方根電壓出現波動后平穩增加,在頻率較高處出現斷崖式下跌。由圖7可看出,頻率較高時,系統的|x|max變化趨勢與均方根電壓類似。
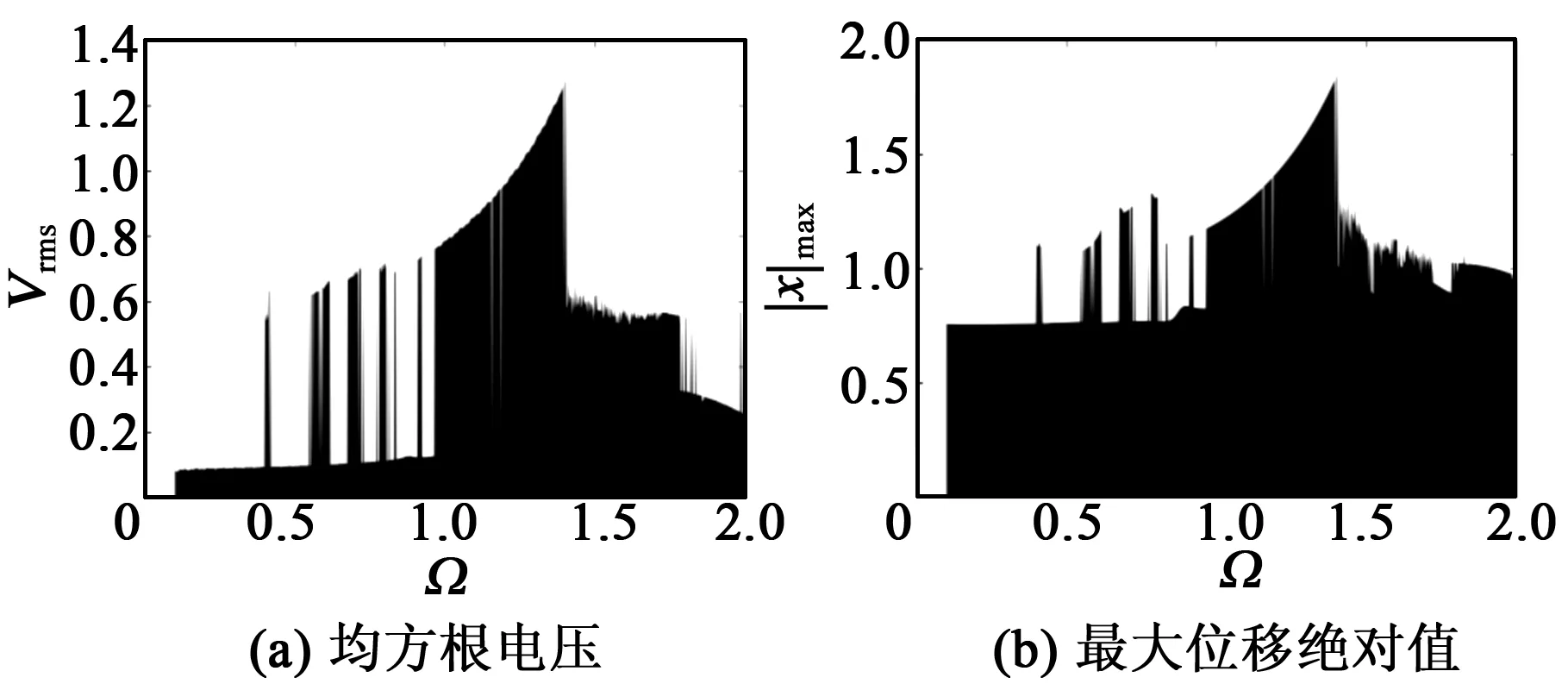
圖7 α=0.1時系統俘能特性的變化
系統處于三穩態的α=0.3時,系統隨激勵頻率變化的Vrms和|x|max如圖8所示。在頻率較低處時,系統的俘能特性較高。與α=0.1時相比,系統的有效工作帶寬和低頻俘能性能均得到增強。此時系統的Vrms與|x|max基本成正比關系。

圖8 α=0.3時系統俘能特性的變化
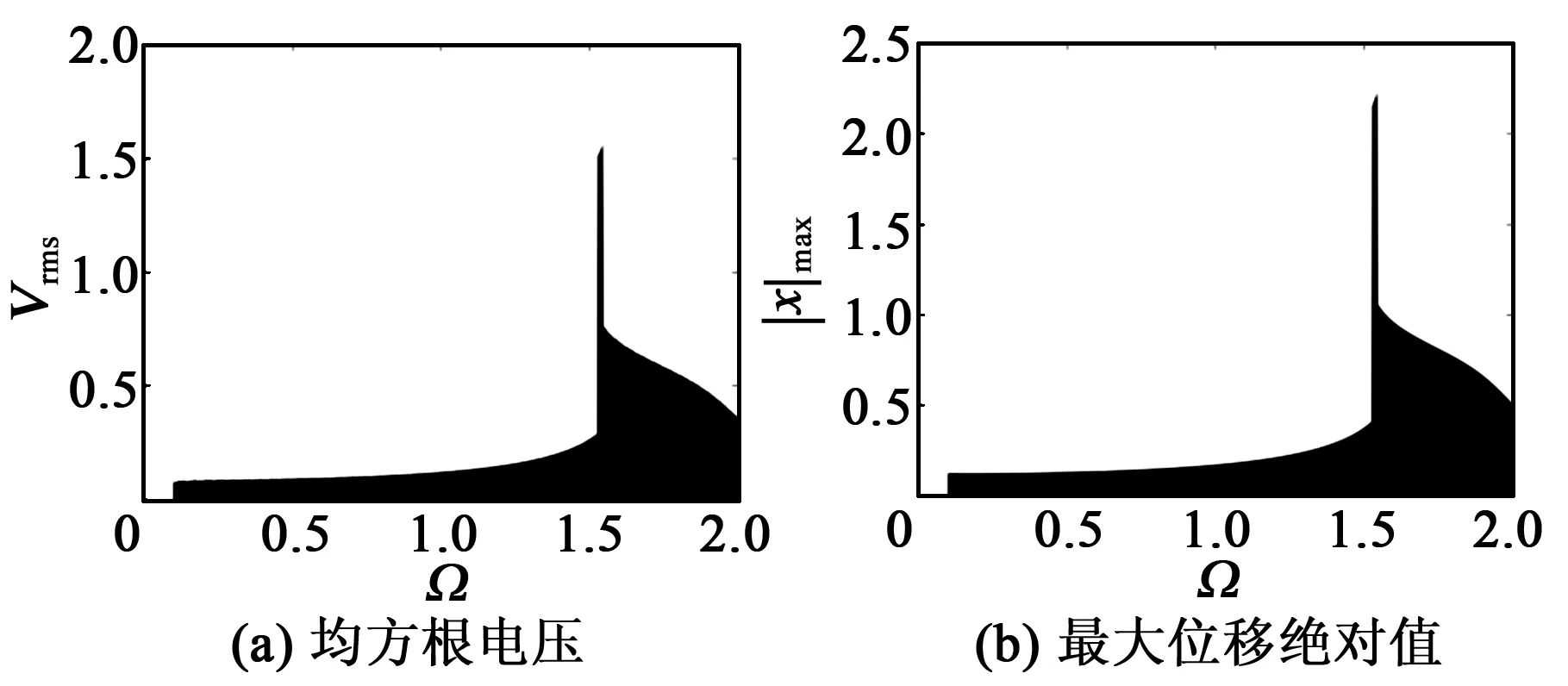
圖9 α=0.8時系統俘能特性的變化
4 隨機激勵下俘能器的運動與俘能特性
本節研究高斯白噪聲隨機激勵下系統的俘能特性,系統參數與第3節相同。
根據文獻[15]得到由獨立單位正態隨機序列ζk模擬的高斯白噪聲信號,即
(10)
式中:D為噪聲強度;Δt為時間間隔;randn(1,N)為N個符合正態分布的隨機數。
將式(6)寫成歐拉差分格式,對系統進行求解,研究不同噪聲強度對系統運動特性的影響。
取噪聲強度D=0.008。當α=0.1時,系統被限制在勢阱內做小幅阱內運動,系統的時域圖及相圖如圖10所示。當α=0.3時,系統能越過勢壘,在3個平衡點間來回跳躍,做大幅阱間運動,系統的時域圖及相圖如圖11所示。當α=0.8時,系統在平衡點附近做混沌運動,系統的時域圖及相圖如圖12所示。

圖10 α=0.1時系統響應圖(D=0.008)

圖11 α=0.3時系統響應圖(D=0.008)
圖12 α=0.8時系統響應圖(D=0.008)
取噪聲強度D=0.02。當α=0.1時,系統此時能越過勢壘,但其阱間運動發生的頻率較低,系統的時域圖及相圖如圖13所示。當α=0.3時,系統仍能做阱間大幅運動,同時阱間運動發生的頻率比D=0.008時增加,系統的時域圖及相圖如圖14所示。當α=0.8時,系統在平衡點附近仍做混沌運動,但大位移振動發生的頻率也明顯增高,系統的時域圖及相圖如圖15所示。

圖13 α=0.1時系統響應圖(D=0.02)
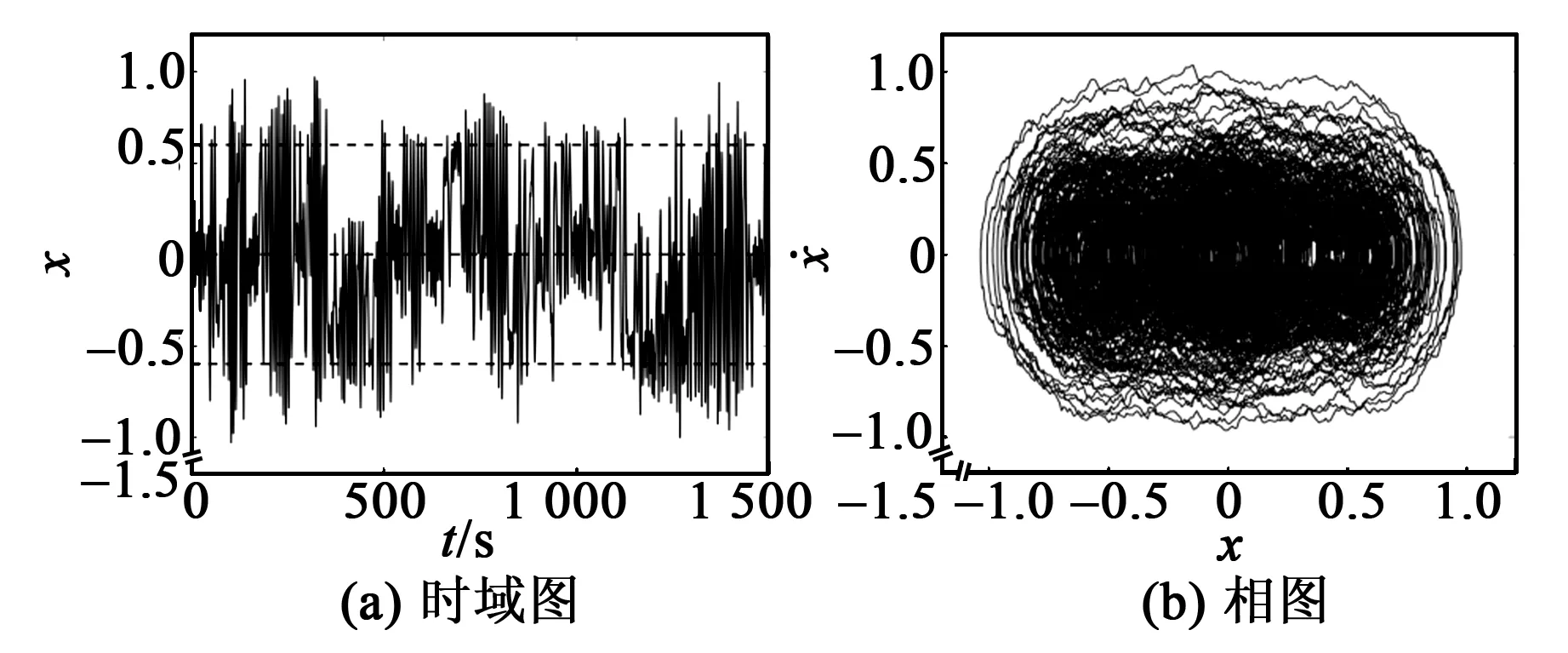
圖14 α=0.3時系統響應圖(D=0.02)

圖15 α=0.8時系統響應圖(D=0.02)
圖16為隨D變化時系統Vrms變化情況。由圖可知,當D較低時,α=0.3時系統具有更好的俘能效果;隨著D增加,Vrms也隨之增加,α=0.1時系統的Vrms與α=0.3時近似相等;而α=0.8時系統的俘能效果較差。總之,在隨機激勵情況下,三穩態系統比其他穩態系統具有更好的俘能特性。

圖16 均方根電壓
5 結論
本文提出了一種機械式多穩態壓電俘能器裝置,利用集中參數法建立了系統的動力學方程,并對其進行了勢能函數分析。研究了在簡諧激勵和隨機激勵下此系統處于不同狀態下的運動和俘能特性,得出以下結論:
1) 彈簧的剛度和位置參數決定了系統的穩態性能,通過調節彈簧的安裝參數,可實現系統的多穩態轉換。
2) 簡諧激勵下,當環境的振動頻率較低時,三穩態系統具有絕對的優勢;隨著頻率增加(Ω>1),雙穩態系統的俘能性能略高于三穩態系統俘能性能,雙穩態系統的峰值均方根電壓為1.272,而三穩態系統的峰值均方根電壓為1.095。在高頻環境中(Ω>1.5),單穩態系統具有比較高的俘能性能。
3) 隨機激勵下,三穩態系統的阱間運動噪聲強度閾值較低,而Vrms較高,且隨著噪聲強度D的增加,Vrms也會增加。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
