底盤懸架K&C試驗臺的電控系統設計及研究
2019-10-21 06:24:46龔杰
汽車世界·車輛工程技術(下) 2019年6期

摘 要:隨著我國汽車工業的飛速發展,人們生活水平的不斷提高。人們對汽車的舒適性、操控性等品質要求也越來越高。相對發達國家汽車企業而言,國內自主品牌汽車企業在底盤性能開發方面尤其是懸架系統研究方面仍存在嚴重不足。由于進口的底盤懸架K&C(K即運動學特性,Kinematic;C即動力學特性,Compliance)測試設備價格非常昂貴,研發高性價比的自主底盤懸架K&C測試設備,縮小與發達國家汽車企業的技術差距,降低自主品牌汽車企業的試驗開發成本,促進本國汽車行業發展具有非常重要的意義。本公司在承襲多年汽車試驗設備開發經驗以及參考國外相關先進設備基礎上成功研制了具有自主知識產權的底盤懸架K&C試驗臺。文章主要介紹該設備的電控系統設計及研究分析。
關鍵詞:底盤;懸架;K&C;電控系統
0 引言
在科學技術高度發達的今天,先進的測試系統都離不開機電技術的高度融合,這種發展趨勢在汽車測試領域尤為突出。測試設備通常由機械系統、電控系統、軟件系統三大部分構成。電控系統對測試設備的測量精度、可靠性、穩定性等關鍵技術指標起著關鍵性作用。
1 測控需求分析
底盤懸架K&C試驗臺廣泛適用汽車整車K&C性能測試,具體包括垂直運動測試、側向柔度測試、縱向柔度測試、側傾運動測試、回正力矩測試、轉向運動測試等試驗內容。試驗臺還需具備車輪軸距輪距自動調整以及車輛自動對中等功能。使用環境為試驗室內常溫環境下,設備臺架布局于試驗現場。主要構成包括車身夾持系統、車身加載系統、車輪加載系統、方向盤位置與轉矩測量系統、車輪定位參數測試系統等。K&C試驗臺的總體布局圖如下所示:
2 電控方案設計
根據底盤懸架K&C試驗臺測控需求分析,按照其功能特性可以將試驗臺的整個電控系統分解為傳感器系統、伺服控制系統、信號采集系統、計算機控制系統、電控配電系統五大子系統。
2.1 傳感器系統
在測控技術領域里,傳感器是一種能把特定的被測信息按一定規律轉換成某種可用信號輸出的器件或裝置。根據測試任務的需要,傳感器主要設計布局在四個車輪平臺上,每個車輪平臺上的傳感器包括三分力傳感器、位移傳感器、角度傳感器。三分力傳感器安裝于車輪平臺的內部,實現Fx、Fy、Fz三個方向的加載測量。通過安裝在輪轂上的車輪定位輪盤連接六個高精度位移傳感器,根據位移傳感器變化,解算出角位移與線位移的變化量,測量車輪位置。角度傳感器安裝在輪轂上的車輪定位輪盤內部,用于測量車輪轉角。
2.2 伺服控制系統
伺服控制系統是一種能夠跟蹤輸入的指令信號進行動作,從而獲得精確的位置、速度及動力輸出的自動控制系統。為在車身加載系統中實現對車身的多自由度加載控制以及在車輪加載系統中實現車輪的定位控制及加載控制,需要考慮設計上采用伺服控制系統來實現需要的功能。伺服控制系統按驅動元件的不同可以分為電氣伺服系統、液壓伺服系統、氣動伺服系統。電氣伺服系統根據電機類型的不同又可分為直流伺服系統、交流伺服系統。根據各類伺服控制系統的控制穩定性、控制精度、響應特性等特點,再結合測試臺架的具體需求,考慮采用交流伺服方式。
不同類型的測試車輛有著不同的軸距和輪距,四個車輪加載系統需具備根據整車軸距與輪距調節平臺位置,進而準確定位整車的位置中心的功能,據此每個車輪加載系統設計了三套伺服系統來實現Fx、Fy、Mz三自由度的功能控制。車身加載系統根據功能要求共設計六套電動伺服控制系統。其中三套用于垂直Z方向的運動加載控制;兩套用于縱向X方向的運動加載控制,一套用于Y方向的運動加載控制。整體形成一個六自由度加載平面,對車身進行實際工況的加載,同時可以消除車輪加載產生的重力誤差,提高測量精度。
2.3 信號采集系統
信號采集系統主要是自動獲得各類傳感器信號的系統。基于測試臺架的功能需要,傳感器主要設計有三分力、位移、角度等。結合設備應用場景,為提高系統的可靠性、穩定性、測量精度,信號采集系統按照分布式設計,將其布局在臺架現場,盡量減少線纜長度,與控制計算機通過網線通訊方式連接。位移傳感器、角度傳感器使用高精度A/B脈沖輸出類型,采用NI CompactRIO 分布式測量控制器及測試模塊組合實現。三分力、數字量輸入輸出、電機編碼器等,采用BeckHoff嵌入式控制器及其功能模塊組合實現。
2.4 計算機控制系統
計算機控制系統主要實現以人機交互的形式來控制測試設備完成各測試任務。計算機控制系統構建測試平臺的架構形式很多,根據具體使用場景不同而不同。若測試系統為整體式臺架,采集控制線路較短,環境干擾影響較小時,通常適合將采集控制卡集成在計算機內部,如各種ISA卡、PCI卡等。若測試系統為分布式布局,采集控制線路較長,環境干擾嚴重時,則適合通過網絡通信的方式構建控制系統。
基于底盤懸架K&C試驗臺的使用場景,計算機控制系統通常布置在客戶的監控室內,與測試臺架的距離較遠,使用了較多的伺服電機及驅動器,整體電磁環境較復雜,干擾嚴重。控制系統需要采用分布式布局,采用工業計算機與NI測量系統和BeckHoff控制系統通過網絡通信實現。
2.5 電控配電系統
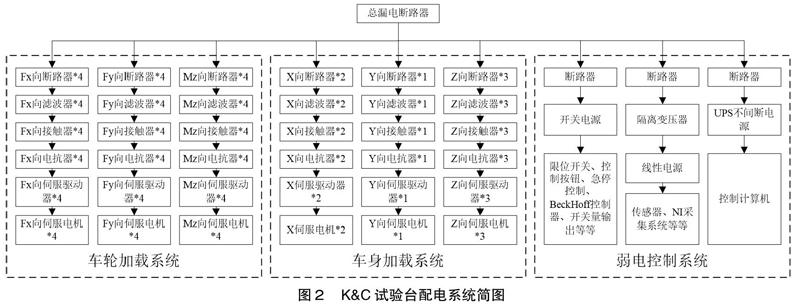
配電系統是底盤懸架K&C試驗臺的重要組成,完善的配電系統是保證設備穩定可靠運行的前提,熟悉各類用電負載的技術要求是設計配電系統的關鍵。在配電設計上需要考慮系統的漏電安全保護,考慮維護檢修的便利性,考慮各子系統之間的相互影響,考慮強弱電系統的隔離處理等。
基于其他子系統的設計,配電系統中強電部分主要包括四個車輪加載系統的Fx/Fy/Mz方向的伺服電機系統、車身加載系統的X1/X2/Y/Z1/Z2/Z3伺服電動缸系統,共計18套伺服控制系統。弱電部分主要包括各傳感器、信號調理、分布式采集系統等。配電系統簡圖如下:
3 信號抗干擾處理
干擾信號是指對有用信號的接收造成損傷的信號。干擾信號按其來源不同可以劃分為外部傳導干擾、外部輻射干擾、內部傳導干擾、內部輻射干擾。傳導干擾是指通過導電介質把一個電氣網絡中的信號耦合到另一個電氣網絡,輻射干擾是指干擾源通過空間把其信號耦合到另一個電氣網絡。為提高測試臺架的測量精度、穩定性、可靠性。必須采取合理的抗干擾措施,減小干擾信號對測量系統的影響,同時也需要盡可能降低系統自身的干擾信號對外部環境的影響。
3.1 外部傳導干擾
外部傳導干擾的主要途徑是設備電源進線。國內通常設備配電采用的是三相五線制。干擾信號通常為50Hz電源中的諧波干擾,其主要來源于供電網絡中的其他用電設備。針對此類型的干擾,需要在配電設計中使用隔離變壓器,這樣也可以防止系統內部的諧波干擾輸出影響供電網絡。
3.2 外部輻射干擾
外部輻射干擾的主要途徑是整個空間環境。輻射干擾源通常分為自然干擾源和人為干擾源兩大類。自然干擾源主要來源于大氣層的天電噪聲、地球外層空間的宇宙噪聲。人為干擾源主要來源于機器設備發射出的電磁信號,其中有部分是專門發射的電磁信號即有意發射干擾源,通常包括廣播、電視、導航等。另一部分為在完成自身功能的同時附帶發射的電磁信號即無意發射干擾源,通常包括輸電線、變頻器及電機、伺服驅動器及電機等。針對此類型的干擾,需要對臺架及柜體做可靠接地。
3.3 內部傳導干擾
內部傳導干擾主要來自伺服驅動器及伺服電機。針對此類型的干擾,需要在配電設計中伺服驅動器必須使用噪聲濾波器以及電抗器,以消除其工作時產生的諧波干擾耦合到弱電系統中,同時也需要在弱電配電中加入隔離變壓器做進一步的隔離處理。
3.4 內部輻射干擾
內部輻射干擾也主要來自伺服驅動器及伺服電機。為解決其工作時產生輻射干擾,需要將伺服驅動器等強電系統和信號采集等弱電系統隔離布局安裝,整個設備的強電和弱電要分開布線,且留足夠間距,伺服驅動器與伺服電機間的電纜需要采用多層屏蔽電纜。信號采集系統的電纜也要采用多層屏蔽電纜,多層屏蔽電纜還需可靠接地,關鍵信號做信號隔離處理,且選擇高品質的元器件。
4 結語
底盤懸架K&C試驗臺研制成功后進行了廣泛的推廣及應用。滿足了廣大的自主品牌汽車企業的汽車研發需求,目前已經取得了不錯的市場業績。在研發過程中,學習和總結的相關測試設備開發經驗可以很好地應用在其他測試設備開發中,對提升整個研發團隊的知識水平以及技術研發能力起到很好的促進作用。
參考文獻:
[1]王伯雄.測試技術基礎(第2版)[M].北京:清華大學出版社,2012(04).
[2]韓九強,張新曼,劉瑞玲.現代測控技術與系統[M].北京:清華大學出版社,2007(09).
[3]徐義亨.工業控制工程中的抗干擾技術[M].上海科學技術出版社,2010(01).
[4]孫傳友,李濤.測控系統原理與設計[M].北京:北京航空航天大學出版社,2014(08).
作者簡介:龔杰(1979-),男,四川內江人,碩士研究生,中級職稱,研究方向:檢測技術與自動化裝置。