基于指數(shù)趨近律滑模控制DC-DC 變換器控制研究
2019-10-19 07:30:20張鵬翔陳國初俞慶
現(xiàn)代計(jì)算機(jī) 2019年25期
關(guān)鍵詞:設(shè)計(jì)
張鵬翔,陳國初,俞慶
(1.上海電機(jī)學(xué)院,上海201306;2.上海電氣風(fēng)電設(shè)備有限公司,上海200241)
0 引言
DC-DC Boost 變換器在新能源發(fā)電、電動(dòng)汽車等領(lǐng)域有十分廣泛的應(yīng)用。由于DC-DC Boost 變換器具有特殊時(shí)變非線性的特點(diǎn),控制器的設(shè)計(jì)具有較高難度。傳統(tǒng)線性的雙閉環(huán)PI 控制能夠滿足設(shè)計(jì)工作點(diǎn)周圍的穩(wěn)定要求,但不能保證變換器偏離設(shè)計(jì)工作點(diǎn)的穩(wěn)定性。滑模控制器是一種針對變結(jié)構(gòu)系統(tǒng)為控制對象的非線性控制,與線性的雙閉環(huán)PI 控制器相比,滑模控制器對輸出負(fù)載的變化具有較好的魯棒性。滑模控制器負(fù)載變化與輸入電壓變化時(shí)擁有較好的魯棒性和響應(yīng)速度。近年來,滑模變結(jié)構(gòu)控制在DC-DC 變換器的應(yīng)用研究成為了熱點(diǎn)。文獻(xiàn)[1]中提出了一種基于輸出電壓的PID 控制滑模變結(jié)構(gòu)控制,這種方法設(shè)計(jì)簡單易于實(shí)現(xiàn),但僅考慮了輸出電壓的影響,沒有考慮電流的影響。文獻(xiàn)[2]采用了Super-Twisting 高階滑模控制算法來控制Buck-Boost 變換器,通過將不連續(xù)控制量作用在其高階導(dǎo)數(shù)上,降低了一階滑模面的抖振,但設(shè)計(jì)較為復(fù)雜。文獻(xiàn)[6]以輸出電壓為控制量設(shè)計(jì)了Buck 變換器的模糊滑模控制,并進(jìn)行了自適應(yīng)控制的改進(jìn)。
本文分析了Boost 電路連續(xù)導(dǎo)電模式的工作工程,得到其狀態(tài)空間模型。并基于此模型進(jìn)行滑模控制的設(shè)計(jì),分析滑模控制的存在性與穩(wěn)定性,最后設(shè)計(jì)仿真實(shí)驗(yàn)控制進(jìn)行驗(yàn)證。
1 Boost電路建模
Boost 變換器是一種常用的直流升壓變換器,具有典型的非線性特征。Boost 變換器在開關(guān)管導(dǎo)通與關(guān)斷的工作狀態(tài)如圖1 和圖2 所示。在充電過程中,開關(guān)閉合,開關(guān)處用導(dǎo)線代替。此時(shí),輸入電壓流過電感。二極管防止電容對地放電。輸入為直流電,電感上的電流以一定的比率線性增加,上升比率與電感大小有關(guān)。隨著電感電流增加,電感開始儲(chǔ)能。放電過程中,當(dāng)開關(guān)斷開時(shí),由于電感的電流保持特性,流經(jīng)電感的電流不會(huì)馬上變?yōu)?,而是緩慢的由充電完畢時(shí)的值變?yōu)?。而原來的電路已斷開,于是電感只能通過新電路放電,即電感開始給電容充電,電容兩端電壓升高。

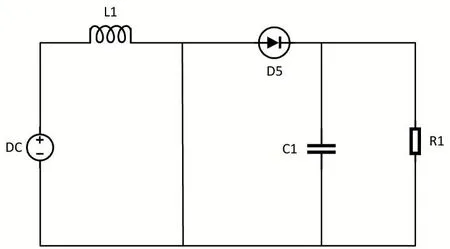
圖1 開關(guān)管導(dǎo)通狀態(tài)

圖2 開關(guān)管關(guān)斷狀態(tài)

則Boost 變換器在一個(gè)完整周期內(nèi)的狀態(tài)空間方程為:

其中,VI為輸入電壓,VO為輸出電壓,iL為電感電流,iR為電阻電流,L 為電感值,C 為電容值,u 為開關(guān)器件的開關(guān)狀態(tài)(開關(guān)開通u=1,開關(guān)關(guān)斷u=0)。
2 滑模變結(jié)構(gòu)控制器設(shè)計(jì)
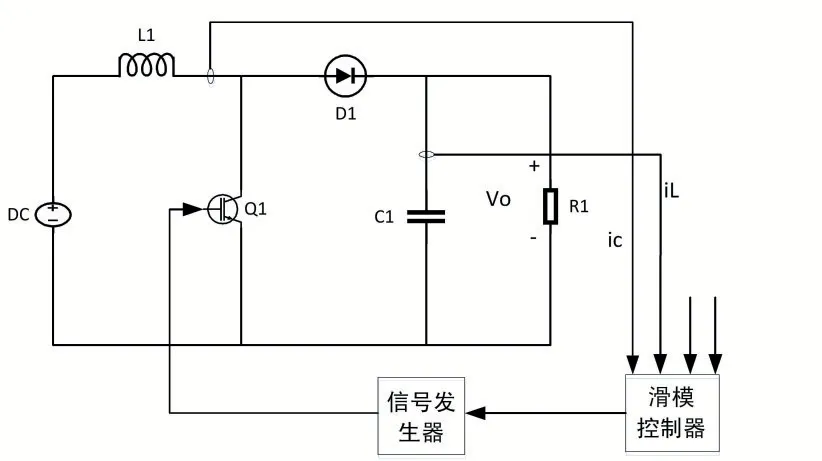
圖3 滑模控制調(diào)制形式

控制狀態(tài)變量選擇電壓誤差x1,電流誤差x2以及電流與電壓的誤差積分,表達(dá)式為:

其 中 Vref為 輸 出 電 壓 的 參 考 值 ,為電感電流的瞬時(shí)參考值,k1、k2分別為電壓誤差與電流誤差的比例值。設(shè)計(jì)以3 個(gè)狀態(tài)變量組成的滑模面:S=a1x1+a2x2+a3x3,a1、a2、a3為滑模面的滑模系數(shù)。
將Boost 變換器的狀態(tài)空間方程式(3)代入式(5)并對時(shí)間進(jìn)行微分可得到電路的動(dòng)態(tài)模型:
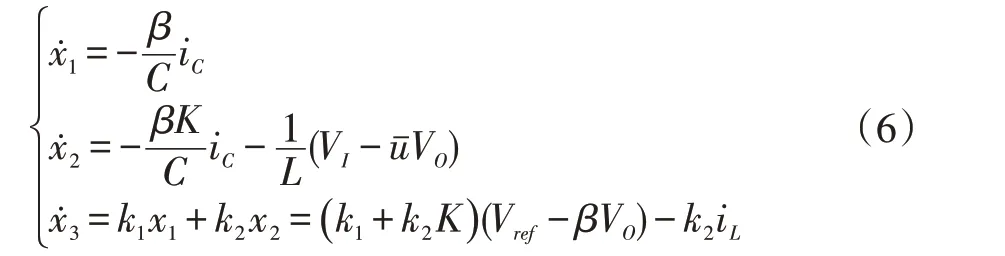
其中ū=1-u,滑模運(yùn)動(dòng)包含趨近運(yùn)動(dòng)和滑模運(yùn)動(dòng)兩個(gè)過程,趨近運(yùn)動(dòng)即系統(tǒng)從任意狀態(tài)向切換面的過程,由于開關(guān)器件的開關(guān)頻率有限、延時(shí)及狀態(tài)軌跡在趨近滑模面慣性的影響。為對趨近運(yùn)行的運(yùn)行軌跡進(jìn)行改善使其快速運(yùn)動(dòng)到滑模面,可以引進(jìn)趨近律對變換器趨近運(yùn)動(dòng)的動(dòng)態(tài)品質(zhì)進(jìn)行改善,本文采用指數(shù)趨近律=-ε sgn s-ηs,減少狀態(tài)運(yùn)動(dòng)到切換面的趨近時(shí)間。將式(6)代入求解得到等效控制:

ueq為連續(xù)值,且在范圍0 和1 之間。同乘VO可得:

令 占 空 比 d 設(shè) 置 為 d=ueq,并 設(shè) 置,設(shè)計(jì)控制信號Vc與斜坡信號Vramp,但由于所設(shè)計(jì)方程采用的參數(shù)數(shù)值較大,不太適合直接在電路中使用,尤其在電壓等級較高的場合。因此引入比例因子g,則方程為:
3 滑模控制分析
3.1 可達(dá)性分析
可達(dá)性即為變換器狀在趨近運(yùn)動(dòng)過程后達(dá)到滑模面,且運(yùn)動(dòng)軌跡能保持在滑模面周圍較小區(qū)域內(nèi)的能力,為保證可達(dá)性的要求需要滿足


可化簡為:

若變換器的工作最大值與最小值滿足存在性條件,則可以表明變換器的全部工作范圍都能滿足存在性的要求。采用輸出的預(yù)期穩(wěn)態(tài)值替代VO,可以保證變換器的工作狀態(tài)在原點(diǎn)周圍區(qū)域內(nèi)滿足存在性要求,可得存在條件為:

3.2 穩(wěn)定性分析
Boost 電路的滑模控制器的運(yùn)動(dòng)方程是由電壓和電流的狀態(tài)變量組成,非線性程度較高且有較高的求解難度,為降低求解難度采用等效控制進(jìn)行分析。將ueq帶入變換器的狀態(tài)空間方程中可得:

假設(shè)滑模面上存在平衡穩(wěn)定點(diǎn),且理想滑模狀態(tài)最終停留在此點(diǎn),平衡點(diǎn)滿足
則狀態(tài)空間方程可以化簡為:

求解此方程可得:

此方程的正實(shí)數(shù)解為輸出電壓的平衡點(diǎn),則系統(tǒng)穩(wěn)定的約束條件為:
4 仿真與實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證所設(shè)計(jì)Boost 滑模控制器的有效性與可行性,在MATLAB/Simulink 中搭建Boost 電路的仿真模型,Boost 變換器電路參數(shù)如表1 所示。

表1 Boost 變換器參數(shù)
分別采用本文所設(shè)計(jì)滑模控制與傳統(tǒng)PI 控制對Boost 變換器進(jìn)行控制,觀察變換器在加載啟動(dòng)、負(fù)載突加突減、輸入電壓變化突變的情況下,兩種控制的控制效果。
圖4 顯示了Boost 變換器在滑模控制及PI 控制下的100Ω 負(fù)載加載啟動(dòng)輸出電壓的波形,滑模控制在0.01s 達(dá)到了穩(wěn)定狀態(tài),PI 控制在0.06s 達(dá)到穩(wěn)定狀態(tài),與PI 控制相比滑模控制擁有較短的穩(wěn)態(tài)時(shí)間與超調(diào)量。圖5 為負(fù)載突減的輸出電壓波形,在t=0.2s 時(shí),負(fù)載由100Ω 切換到50Ω,圖6 為電壓突變的輸出電壓波形,在t=0.2s 時(shí),輸入電壓由500V 突變?yōu)?00V 。通過輸出電壓的仿真波形上可以得出,利用本文設(shè)計(jì)的滑模控制策略控制Boost 變換器,在負(fù)載加載啟動(dòng)、負(fù)載突增突減及輸出電壓波動(dòng)時(shí),輸出電壓的波動(dòng)范圍均停留在穩(wěn)態(tài)值較小的范圍內(nèi)。而常規(guī)PID 控制器在變換器存在較大擾動(dòng)影響時(shí),出現(xiàn)較大的負(fù)調(diào)現(xiàn)象,具有較長的過渡時(shí)間,動(dòng)態(tài)品質(zhì)不夠理想。
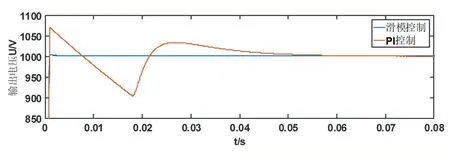
圖4 滑模控制與PI控制負(fù)載加載啟動(dòng)輸出電壓波形
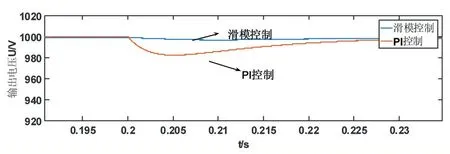
圖5 滑模控制與PI控制在負(fù)載突減輸出電壓波形
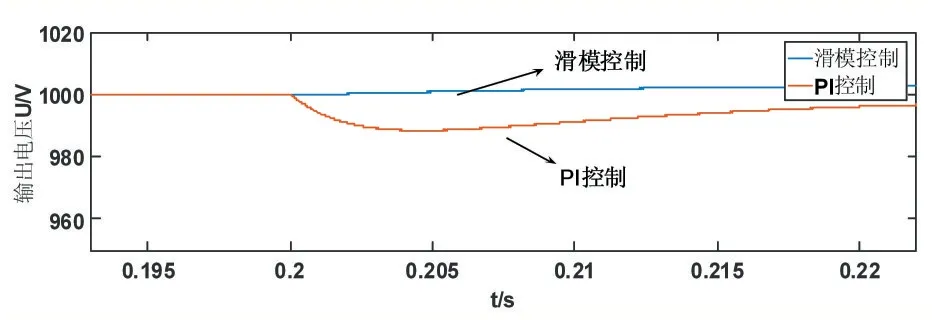
圖6 滑模控制與PI控制在電壓變化輸出電壓波形
5 結(jié)語
本文首先根據(jù)Boost 變換器在連續(xù)導(dǎo)電工作模式下的運(yùn)行狀況得到其狀態(tài)空間模型,然后設(shè)計(jì)了以電壓誤差、電流誤差及電流電壓誤差積分和為狀態(tài)量的滑動(dòng)模態(tài)面,為改善趨近運(yùn)動(dòng)的運(yùn)動(dòng)軌跡引入指數(shù)趨近律改善其趨近運(yùn)動(dòng)的動(dòng)態(tài)性能;隨后,通過理論分析推導(dǎo)得到其的存在與穩(wěn)定條件,最后通過仿真實(shí)驗(yàn)對比滑模控制與PI 控制在負(fù)載突加突減及輸入電壓變化下的控制效果,可以得出本文采用的滑模控制相較PI 控制對系統(tǒng)參數(shù)變化有具有較小的過渡時(shí)間,較好的動(dòng)態(tài)品質(zhì),較高的魯棒性。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04