室內定位研究方法綜述
2019-10-18 02:57:59王星星叢思安
軟件導刊 2019年9期
王星星 叢思安
摘 要:基于位置的服務對用戶位置精度要求越來越高,現有室外定位技術已無法滿足要求,因此室內定位研究具有重要應用價值。分析了室內定位特殊的環境因素,闡述了室內定位的基本原理、實現步驟與方法,重點分析了目前廣泛使用的指紋定位技術及相關改進方法,總結了室內定位研究趨勢。
關鍵詞:室內定位;環境因素;指紋定位
DOI:10. 11907/rjdk. 182861 開放科學(資源服務)標識碼(OSID):
中圖分類號:TP301文獻標識碼:A 文章編號:1672-7800(2019)009-0009-04
Review of Study Methods of Indoor Positioning
WANG Xing-xing,CONG Si-an
(College of Information Engineering, Minzu University of China, Beijing 100081, China)
Abstract: The continuous development of location based service(LBS) puts forward higher requirements for the accuracy of users' position. The existed outdoor positioning technology has been unable to meet the demands of positioning accuracy, so the research of indoor positioning shows important application value and significance. This paper concentrated on inducing the general methods and procedures of indoor positioning to provide the study methods to beginners in the field. Firstly, this paper analyzed the environmental factors that affect indoor positioning; secondly, it expounded the technologies, implementation methods and algorithms of indoor positioning; thirdly,it focused on fingerprint location technology as well as its improvements. Finally, this paper summarized the research trends of indoor positioning.
Key Words: indoor positioning; environmental factors; fingerprint location
0 引言
研究表明,人們有超過80%的時間位于室內,因此提供精確的室內位置信息對生產生活具有重要意義[1]。隨著物聯網及無線傳感器網絡的發展,基于位置的服務(Location Based Services,LBS)應用越來越廣泛,這對室內定位精度提出了更高要求。
室內定位技術研究最早可追溯到1996年美國聯邦通信委員會制定的E-911定位標準,之后室內定位技術得到快速發展[2]。室內定位包含兩個基本要素:環境因素和定位實現。一個優良的室內定位方法并不僅限于追求高的定位精度,還應包括高精度、低功耗、低成本、隱私保護和信息安全幾個方面 [3]。
1 環境因素
室內環境的特殊性使得原有的GPS信號發生中斷,因此在室內繼續采用GPS技術難以實現精準定位。室內環境的復雜性對定位的影響主要體現在兩個方面:①環境變化引起的定位精度下降;②原有語義信息失準[4]。
一方面,信號在室內傳播時由于衰減、非視距傳播(Non-Line of Sight,NLOS)、反射、衍射、多徑等造成信號強度不穩定,從而引起定位誤差。墻體等建筑的厚度、材質以及結構、室內人員的密度、人員活動、室內溫度及濕度的變化也會對無線信號的強度造成一定程度的干擾[5];另外在采集信號時,移動設備的型號、用戶手持移動設備的方向以及人體遮擋,甚至是采集時間不同也會導致信號強度存在差異和不穩定性。
另一方面,基于室內環境的語義信息,如房間編號、區域、功能等信息會隨著時間及環境變化而發生變動,從而使原有的語義信息和基于語義所提供的位置信息精確度下降。
2 定位實現
應當根據具體環境設計合理的方法實現定位,方法一般包括位置估計和位置跟蹤兩大類。位置估計指目標當前所在位置的估計,位置跟蹤指一段時間內移動目標的運動軌跡,它在時間上具有移動性和連續性。
無論是哪種定位,都遵循以下兩個基本操作流程:
(1)根據客觀環境選擇合適的定位技術,常用的定位技術包括ZigBee技術、射頻識別技術(Radio Frequency Identification, RFID)、超寬帶技術(Ultra Wideband, UWB)、WiFi 技術、地磁、慣性傳感器、可見光等[3-4]。
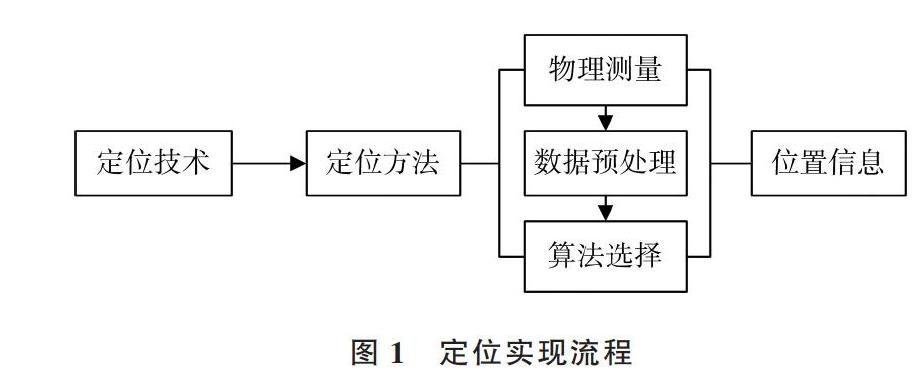
(2)確定定位方法。定位方法分為3個步驟:①物理測量,根據定位技術收集定位所需要的數據;②數據預處理,對采集到的數據進行降噪、降維等處理,使數據更加符合算法要求;③算法選擇,確定位置信息的計算規則并最終實現位置估計或跟蹤。具體流程如圖1所示。
2.1 定位技術
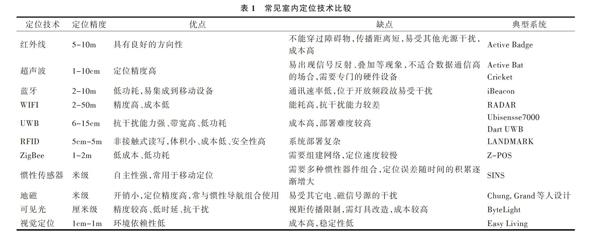
定位技術廣泛應用于室內定位中,文獻[7-9]對主流定位技術進行了詳細描述,表1概括了常見定位技術的定位精度、優缺點及典型系統。
2.2 定位方法
2.2.1 物理測量
物理測量手段中任何具有位置區分性的信號,如聲、光、電磁波、視覺信號等都可以用于定位。信號的位置可區分性越高,則達到的定位精度就越高,如超聲波、聲波等傳播速度慢的信號可以達到厘米級精度,而無線電波傳播速度快,精度最多可以達到米級。基于測距的定位通常需要精確測量信號在發射端和接收端的傳播時間,指紋定位則需要測量來自各信源節點的信號強度。
2.2.2 數據預處理
室內定位數據預處理主要是對參考節點及待測節點收集到的數據進行降噪處理。
由于室內復雜環境的干擾導致接收信號不穩定,因此需要過濾掉采集信號中的異常值。常見的濾波算法有均值濾波、高斯濾波、小波去噪、卡爾曼濾波等方法。文獻[10]采用均值濾波法對同一位置采集的多條信號強度信息求均值,保留較穩定的信號強度;文獻[11]采用高斯濾波去噪。假設測量的信號強度服從高斯分布,利用該分布過濾掉小概率信號強度的干擾;文獻[12]采用小波去噪的方法將信號與噪聲分解并過濾掉噪聲;文獻[13]采用卡爾曼濾波過濾掉多徑效應造成的異常值。
2.2.3 算法選擇
室內定位主要集中在位置估計和位置跟蹤兩個主要方面。位置估計算法利用已知位置的參考點對待測點進行位置預測。位置跟蹤算法則需要實時追蹤待測點的位置信息并獲得位置軌跡。位置估計是對靜態位置的估計,而位置追蹤則是移動定位,因此它們在算法選擇上也具有較大的差異性。
(1)位置估計。①測距定位:基于測距的定位算法通過特定的測距技術獲得待測點與已知位置的參考點之間的距離,并借助它們之間的幾何關系估計待測點的位置信息,常用算法包括到達時間技術(Time of Arrival,TOA)、到達時間差技術(Time Difference of Arrival,TDOA)和到達角度技術(Angle of Arrival,AOA)等[3,14];基于測距的方法通常需要部署專門的硬件設備,測量過程也較復雜,而且需要建立復雜的傳播模型和衰減模型,該模型需要綜合考慮多徑傳播、墻體反射、人體干擾等諸多因素,因此采用簡單的非測距方法更為普遍;②非測距定位:非測距定位通常用指紋定位進行位置估計,指紋定位在實施上更容易實現,因此應用廣泛,但是前期需要投入大量的人力和時間進行數據收集和數據處理去構建指紋庫。
(2)位置跟蹤。位置估計是一種靜態估計方案,它沒有考慮待測點的移動性,但位置跟蹤具有時間屬性,通過歷史移動狀態對當前位置進行預測,常見算法有凸近似定位、移動基線定位、蒙特卡洛定位(即粒子濾波器)[3]和卡爾曼濾波系列[14]算法。
位置跟蹤常見問題是誤差累計。由于當前位置的計算是基于前一刻的數據預測得到,每次位置預測都會產生一定誤差,且隨著時間的推移誤差會逐步增大,這是位置跟蹤定位不精確的主要原因。
3 指紋定位
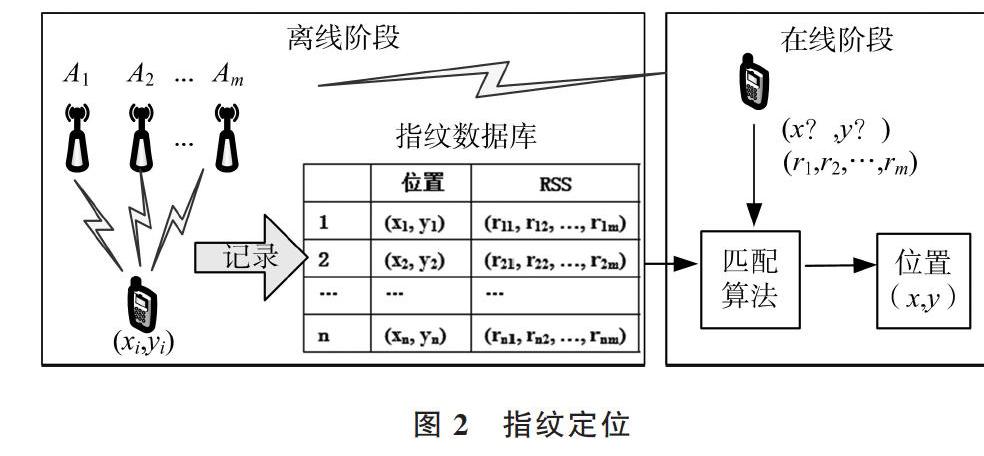
指紋定位利用信號強度隨傳播距離衰減的特征,將所處位置接收到的各個錨節點信號強度指示(Received Signal Strength Indication,RSSI)作為當前位置的唯一標識(指紋),主要包含離線訓練和在線定位兩個階段,如圖2所示。
離線階段在已知的參考點上獲取接收到的錨節點信號強度,構成 “位置-信號強度”指紋向量,完成指紋庫構建;在線階段將待測點收到的各錨節點信號強度與指紋庫中指紋向量包含的信號強度進行匹配,找到相似度較大的指紋向量,并利用指紋向量對應的位置信息估計待測點位置[3]。
3.1 離線訓練
設錨節點有m個,記為[A1],[A2],…,[Am],已知位置的參考點有n個,離線訓練階段對每個參考點收集信號強度,建立位置-信號強度指紋庫I,[ri]表示參考點的信號強度向量,[li]表示參考點的位置向量,則有
I={([r1], [l1]),([r2],[l2]),…,([ri], [li]),…,([rn], [ln])}
n表示參考點個數
[ri]=([ri1,ri2,?,rij,?,rim])
m表示錨節點的個數
[li=(xi,yi)]
其中[rij]為第i個參考點上接收到的來自第j個錨節點的平均信號強度。由于信號不穩定,通常需要在同一個參考點上對信號進行多次測量,然后對多次測量的結果進行降噪處理并求取平均值。
一般離線階段只要構建出與環境相符的指紋庫即可。為進一步提高指紋定位精度,可通過以下3方面對離線階段進行改進。
(1)對參考點信號進行降維處理。離線階段收到的信號都來自錨節點(如WiFi定位中的AP),雖然錨節點數目越多在一定程度上越能提高定位精度,但過多的信號發射結點易導致它們之間發生信號干擾,同時計算復雜度也會較高,因此要對參考點收集到的信號進行降維。降維后,[ri]=([ri1,ri2,?,rim]),降低維度為:[ri]=([ri1,ri2,?,rik]),其中k≤m。相應地,若離線階段進行了降維處理,在線階段采集的信號也應進行降維處理。
常見的降維方法包括選擇法和特征提取法。選擇法設定一個衡量標準,如對應信號強度大小[15]、信源之間的分散度、最大信息熵、互信息最小化[16]、離散注水優化模型[17]等,然后根據設定的標準對信源進行篩選。特征提取法通過算法選出具有代表性的信源,常見的算法有主成分分析法(CPA)、線性判別分析(LDA)和獨立成分分析(ICA)以及核函數法,核函數方法充分考慮了線性及非線性特征[18]。
通過上述方法,能夠篩選出具有代表性的特征向量,在降低計算復雜度的同時提高定位精確度。
(2)根據已知參考點信號對指紋空間進行擴充。一般指紋庫中采集的參考節點指紋信息越多,定位精度也會越高,但大量的指紋采集工作會耗費較高的時間、人力和物力成本。為有效解決指紋庫密度與構建成本的矛盾,研究人員提出了指紋補償思想,即利用現有參考點的指紋信息模擬鄰近點的指紋信息,該方法能有效擴充指紋空間,有利于降低指紋采集成本。常見的補償方法包括克里金插值[13,19-20]、矩陣補全原理[21-22]和神經網絡預測[23-24]等方法。
(3)采用聚類算法降低搜索空間。由于指紋空間較大,在線階段若直接將待測點指紋與指紋庫進行匹配,需要遍歷整個指紋庫,計算復雜度較高且定位效率低。為了降低搜索空間,離線階段構建指紋庫時通常采用K-means、DBSCAN等聚類算法[12-14]。以聚類為主的方法實際上體現了一種先進行粗定位、再進行細定位的思想。粗定位能夠有效提高定位效率,細定位確保了高定位精度,二者達到平衡。
3.2 在線定位
指紋定位主要通過訓練匹配模型,將待測RSS信號與指紋庫信號進行匹配,以估計待測點位置。匹配模型通常采用機器學習算法,主要包括3類:①確定性定位算法:直接計算待測位置的指紋與指紋庫中每一條指紋數據之間的向量距離,選取距離待定位點最近或多個參考點的位置,計算待測點位置,如最鄰近法(NN,KNN,WKNN);②概率型定位算法:將測得的指紋庫數據按照一定的模型轉化為概率分布的形式實現定位,如樸素貝葉斯算法、最大似然概率法、直方圖法及核函數法等[25];③人工神經網絡定位算法:該算法不必事先知道輸入(信號強度)與輸出(位置)之間的數學模型,通過隱層堆疊及每一層對上一層的輸出進行權重優化的學習機制完成位置估計,具有很好的函數逼近功能,常見的如BP神經網絡[26-29]、深度信念網絡等算法。此外,支持向量機算法等機器學習算法[30]也廣泛應用于定位。
4 研究趨勢
目前尚沒有成熟穩定且廣泛應用的高精度室內定位技術,提高定位精度在很長一段時間內仍是室內定位的主要研究方向。
隨著無線傳感網絡及物聯網的迅猛發展,采用自組織網絡的定位技術會得到深入研究;不同定位技術間的融合能有效克服單一定位技術的局限性,所以融合定位將成為提高精度的主要方法之一。
在指紋定位中,室內環境變化和設備位置移動會導致在線階段監測的指紋數據與離線階段建立的指紋數據不一致,因此采用一定的策略對指紋定位中的指紋庫進行更新是提高定位精度的有效方法之一。更新指紋庫方法有眾包更新、將高精度定位結果實時更新到指紋庫等方法[31]。此外,位置指紋表征也會趨向多樣化,如建立物理臨近信息庫[32]、收包率[33]、接入數目、移動端方向角[34]等方法。
5 結語
室內定位技術由于其特殊的環境因素帶來的多徑、反射、非視距等影響,定位難度和復雜度要高于室外定位。在實現定位時充分考慮環境因素影響有助于提高定位精度,從而為用戶提供更加精準的基于位置的服務。無論是定位技術的融合或改進,還是定位算法的優化,都為提高室內定位的精度研究提供了方法和技巧。隨著定位精度的提高,深入探討和研究室內定位的功耗、用戶隱私及信息安全等問題,有助于室內定位技術的廣泛應用。
參考文獻:
[1] DENG Z L,YAN P. Situation and development tendency of indoor positioning[J]. China Communications,2013,10(3):42-55.
[2] 王靜. 基于信號強度室內定位技術的研究與實現[D].北京:北京工業大學,2009.
[3] 史蒂芬·山德,阿明·達曼.無線通信系統中的定位技術與應用[M].郎為民,譯.北京:機械工業出版社, 2016.
[4] 劉云浩.Location, localization and localizability[J].計算機科學技術學報:英文版,2010, 25(2):274-297.
[5] 陳斌濤,劉任任,陳益強,等.動態環境中的WiFi指紋自適應室內定位方法[J]. 傳感技術學報, 2015(5):729-738.
[6] 趙銳,鐘榜,朱祖禮,等. 室內定位技術及應用綜述[J]. 電子科技, 2014,27(3):154-155.
[7] 關歡. 無線網絡室內定位技術的設計與實現[D]. 上海:上海交通大學, 2015.
[8] 鄧中亮,尹露, 唐詩浩,等. 室內定位關鍵技術綜述[J]. 導航定位與授時,2018(5):88-92.
[9] 徐盛良,魯照權,周永燕,等. 基于超聲波測距的室內定位系統[J]. 機械設計與制造工程,2017, 46(11):112-116.
[10] LENG Y F, ZHU H P, ALSHARARI T, et al. An improved RSSI positioning algorithm based on reference distances[J]. Advanced Materials Research, 2014(971-973):1547-1552.
[11] WANG Y, ZHAO Y, MUHAN L I. Application research of Gauss filter in Zigbee indoor positioning[J]. Journal of Geomatics, 2016(1):512-517.
[12] GONG P, MAO Y, DU Y. An UWB indoor location algorithm based on wavelet de-noising[J]. Microcomputer & Its Applications, 2015(6):66-69.
[13] 章曉強,方飛,應可珍,等. 一種基于插值的室內指紋定位系統設計與實現[J]. 傳感技術學報,2017, 30(4):596-602.
[14] 方旭明. 基于自適應卡爾曼濾波器的WSN定位算法研究[D]. 南京:南京大學, 2017.
[15] 劉乾辰,徐昌慶,祝正元,等. 一種改進的無線局域網位置指紋定位法[J]. 信息技術, 2014(7):140-142.
[16] 張偉,花向紅,邱衛寧,等. WiFi指紋定位的一種新組合算法[J]. 測繪工程, 2017, 26(3):14-18.
[17] 周牧,蒲巧林,田增山. 室內WLAN定位中位置指紋優化的接入點部署方法[J]. 通信學報,2015, 36(s1):30-41.
[18] 周志華,王玨. 機器學習及其應用[M]. 北京:清華大學出版社, 2007.
[19] 毛科技,方凱,戴國勇,等. 采用Kriging的WSN多維度向量指紋定位算法研究[J]. 小型微型計算機系統,2016,37(11):2514-2519.
[20] 郭紅成,羅海勇,尹浩,等. 基于線性插值和動態指紋補償的分布式定位算法[J]. 傳感技術學報, 2009, 22(12):1795-1801.
[21] CHANG L, XIONG J, WANG Y, et al. Lupdater: low cost RSS fingerprints updating for device-free localization[C]. International Conference on Distributed Computing Systems,2017:900-910.
[22] 沙朝恒,肖甫,陳蕾,等. 一種基于矩陣補全的室內指紋定位算法[J]. 計算機科學,2016, 43(6):91-96.
[23] 韓曉曉. 基于RBF神經網絡的動態射頻地圖建立方法研究[D]. 太原:太原科技大學,2015.
[24] 吳東金,夏林元. 面向室內WLAN定位的動態自適應模型[J]. 測繪學報, 2015, 44(12):1322-1330.
[25] 張文學. 基于WiFi的RSSI指紋定位算法研究[D]. 成都:電子科技大學, 2015.
[26] 李瑛,胡志剛,劉洋. 一種基于BP神經網絡的室內定位模型[J]. 計算機應用,2007, 27(b06):56-57.
[27] 李麗娜,梁德骕,馬俊,等. 基于灰色-RBF神經網絡的傳播損耗模型訓練[J]. 計算機應用與軟件,2016,33(8):136-140.
[28] 石曉偉,張會清,鄧貴華. 基于BP神經網絡的距離損耗模型室內定位算法研究[J]. 計算機測量與控制, 2012, 20(7):1944-1947.
[29] 吳東金,夏林元. 面向室內WLAN定位的動態自適應模型[J]. 測繪學報,2015,44(12):1322-1330.
[30] 李福堅,吳黎明. 一種改進的支持向量機的室內指紋定位技術[J]. 自動化與信息工程, 2014,35(4):29-33.
[31] 李燕君,徐凱鋒,邵劍集. 利用眾包更新WiFi室內定位指紋庫的方法研究[J]. 傳感技術學報, 2014(12):1692-1698.
[32] 周牧,張巧,邱楓. 基于物理鄰近點輔助的無線局域網指紋定位方法[J]. 計算機應用,2014, 34(6):1563-1566.
[33] 張金藝,張晶晶,李若涵,等. 流水線型局部加權回歸RFID室內定位[J]. 應用科學學報, 2014(2):125-132.
[34] 劉志鵬,袁敏. 一種基于WiFi的改進型室內位置指紋定位方法[J]. 計算機與現代化, 2016(4):36-39.
(責任編輯:杜能鋼)