MEMS矢量水聽器陣列的仿真與實驗研究
2019-10-17 08:18:34馮飛
指揮控制與仿真 2019年5期
關鍵詞:信號
馮 飛
(中國人民解放軍91388部隊,廣東湛江 524022)
低頻、小型化、陣列化、低功耗、低成本是水聽器和矢量水聽器發展的重要方向,基于微電子機械系統(Microelectro-mechanical systems, MEMS)水聽器和矢量水聽器能滿足這一要求[1]。低頻、小型化、陣列化、低功耗、低成本是矢量水聽器的發展方向,MEMS矢量水聽器具有體積小、功耗低等優勢[2],能夠滿足這類平臺對體積、功耗等的要求。目前多數方位估計方法均是基于等間距均勻直線陣列的,本文利用MEMS矢量水聽器進行了組陣仿真實驗研究,因為這類型陣列的信號遵循范德蒙行列式的形式,能夠方便地進行數據處理[3]。因此,研究小尺度均勻直線陣列是研究其他形式陣列的基礎,具有重要的實際意義。本文以6元矢量水聽器均勻直線陣列為例,通過優化設計,以較小的陣元間距構成線型陣列,在給定的仿真參數下,對其性能進行了仿真與實驗驗證。
1 六元垂直陣列增益理論與仿真
矢量水聽器具有“8”形方向性,可以提供聲場的方向信息,因此本文將矢量水聽器組成的陣列與標量水聽器陣列進行比較。它在信噪比處理增益方面具有優勢。由于矢量水聽器可以同時提供聲壓和振動速度信息,因此可以通過波束形成方法獲得多個波束形成的輸出及其組合。這里,僅分析由二維矢量水聽器組成的均勻線性陣列。
假設信號與噪聲不相關,并且信號的入射方位角與引導方位角一致,即對于任何方向的入射信號,其中的信號分量通過波束形成同相疊加。波束形成后的聲壓和振動信號的順序表示為
Vci=Vxicosθ′+Vyisinθ′
(1)
式中,θ為信號的入射方位角,θ′為引導方位角,Vyi為聲壓信號,Vxi為振束信號。
1.1 組合形式選擇
對于常用的組合形式,其理論增益如表1所示[4]。
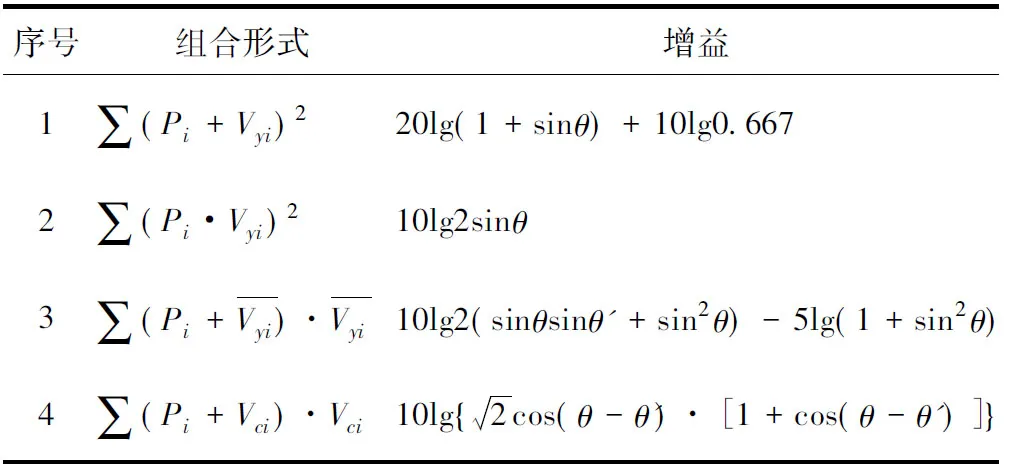
表1 組合形式
從表1可以看出,當θ=θ′=π/2時,四種組合的組合增益分別為4.26 dB,3.01 dB,4.52 dB和4.52 dB。當θ′=θ=0時,組合1,3增益很小,組合2增益是負無窮大。組合4利用兩種振動速度,并且組合增益不受角度變化的影響。因此,這里處理組合4以處理矢量水聽器陣列輸出信號以實現最大增益。
1.2 矢量陣增益仿真
在相同條件下,不同頻率的矢量陣列的增益高于聲壓陣列的增益[5]。這里,Matlab用于模擬6元素矢量水聽器陣列的矢量組合增益。陣元間距為0.5 m,有效陣列長度為3 m,實際陣列長度為3.5 m,聲速為1 500 m/s。信號頻率為1 kHz,采樣頻率為10 kHz,低頻白噪聲上限截止頻率為4 kHz。當θ=θ′=π/2時,結果表明,當使用四種不同組合的形式時,6元矢量水聽器的增益分別為10.0 dB、8.7 dB、10.3 dB、10.3 dB;當θ=θ′=π/4時,結果表明,當使用四種不同組合的形式時,6元矢量水聽器的增益分別為8.6 dB、7.2 dB、7.9 dB、10.3 dB。結合兩組數據可以看出,組合4形式的增益不受方位角的影響,所以采用組合4形式處理矢量水聽器陣列輸出信號來實現最大增益,即使用組合4形式的 6元矢量水聽器的增益為10.3 dB。
1.3 波束指向性圖仿真
本次實驗使用的矢量水聽器包含二維矢量通道,且含有標量通道,為了得到具有較高增益較窄波束的組合指向性,采用聲壓振速聯合處理選擇(P+VC)*VC組合方式。
其中,P為聲壓,Vx、Vy分別為xy路振速,θ為方位角,Vc=Vxcosθ+Vysinθ。
其指向性波束如下[6]:
(2)
R(n)=w*(1+cos(θ-θ0))cos(θ-θ0)
(3)
對波束指向性數據處理,結果如圖1所示。
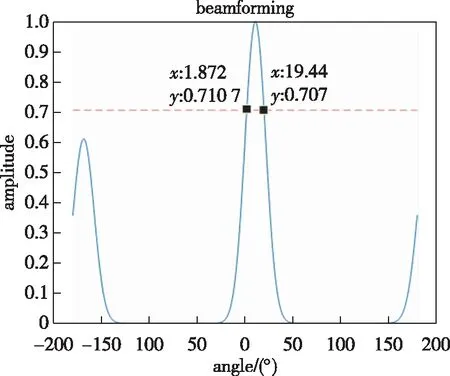
圖1 波束指向性仿真圖
仿真結果如圖1所示,橫坐標對應著方位角關系,縱坐標對應著波束指向性關系,由圖1中兩點數據可知,1 kHz信號在陣元間距為0.5 m時,波束寬度為20°。
2 陣列增益測試
在開闊水域進行實驗,測試水深,水面相對平靜,可以認為噪聲是各向同性的。MEMS矢量水聽器陣列由MEMS矢量水聽器、支架、指南針等組成。實驗場地是開放式水庫,底部是倒梯形結構。岸邊建有浮橋構成的碼頭伸入水中 ,碼頭處水深約15 m,水庫中央深度約50 m。 使用支撐框架組成矩形支撐結構,將6支矢量水聽器以間隔0.5 m方式固定在支架上,1個標量水聽器從頂部固定在與第三個水聽器相同的位置。它們剛性固定,電子羅盤固定在水聽器支架上。使用采集卡實時采集采集數據,采樣軟件中的采樣率設置為10 K/s,實驗示意圖如圖2所示。
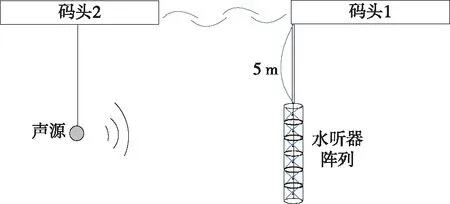
圖2 實驗方案示意圖
將水聽器陣列從碼頭1處放入水中,采集設備放置于碼頭1上,發聲換能器置于碼頭2上。聲源與水聽器陣列間距17.6 m。其中聲源入水深度6.75 m,陣列入水深度5 m。聲信號發射頻率1kHz,波型為正弦。采用數據采集卡記錄每個頻點數據,采樣頻率10 K/s,采樣時間為連續信號1 s。
在計算時使用聲壓振速聯合處理的方式取得陣列信號,并通過功率譜密度圖像計算信噪比。組合方式如式(4)
P0=vi(n)(P(n)i+vi(n))
(4)
對陣列增益數據處理,結果如圖3所示。
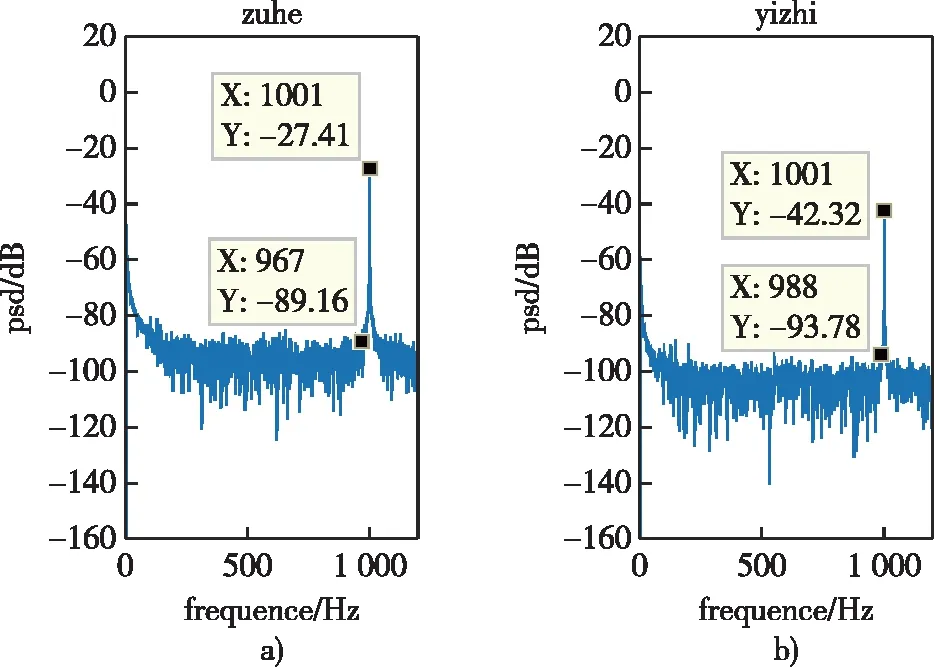
圖3 信號的功率譜密度
圖3a)為陣列信號的功率譜密度圖,橫坐標對應著頻率關系,縱坐標對應著功率譜密度關系,由圖中兩點數據可知,陣列信號信噪比為61.75 dB,圖3b)為單支矢量水聽器信號的功率譜密度圖,橫坐標對應著頻率關系,縱坐標對應著單支矢量水聽器信號功率譜密度關系,由圖2中兩點數據可知,單支矢量水聽器信噪比為51.46 dB。綜合a)、b)圖對應的信噪比分別為61.75 dB,51.46 dB可知,陣列增益為10.3 dB。
3 波束寬度測試
實驗示意圖如圖2所示。將水聽器陣列從碼頭1處放入水中,采集設備放置于碼頭1上,發聲換能器置于碼頭2上。兩碼頭間距17.6 m,聲源入水深度6.75 m,陣列入水深度5 m,聲信號發射頻率1 kHz,波型為正弦。采用數據采集卡記錄每個頻點數據,采樣頻率10 K/s,采樣時間為連續信號1 s。
對陣列波束寬度數據處理,結果如圖4所示。
本文使用矢量水聽器波束形成算法,對陣列信號進行波束測試,結果如圖4所示,橫坐標對應著方位角關系,縱坐標對應著陣列波束寬度關系,由圖中兩點數據可知,陣列的波束寬度為17.6°。
4 結束語
本文對所設計的6元件MEMS矢量水聽器陣列的陣列增益和波束寬度進行了仿真和實驗驗證。 表明其具有較好的一致性,這為應用開拓帶來了可行性。矢量水聽器陣列對于提高水聽器的可靠性非常重要,為MEMS矢量水聽器的工程應用奠定了基礎。 MEMS矢量水聽器陣列可進一步應用于水下聲學對抗,并且需要可進一步研究安裝在魚雷、潛艇和艦船上進行水下目標檢測。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
