電液提升裝置能量回收系統(tǒng)設(shè)計(jì)及分析
2019-10-16 05:38:20聶波,張進(jìn)
中國(guó)工程機(jī)械學(xué)報(bào) 2019年5期
聶 波,張 進(jìn)
(1.咸寧職業(yè)技術(shù)學(xué)院 工學(xué)院,湖北 咸寧 437100; 2.江蘇大學(xué) 機(jī)械工程學(xué)院,江蘇 鎮(zhèn)江 212000)
提升裝置的工作效率與環(huán)保節(jié)能效果密切相關(guān),隨著限制全球變暖的排放標(biāo)準(zhǔn)變得日益嚴(yán)格[1],提高機(jī)器能源效率已經(jīng)成為備受關(guān)注的問題[2-3].提高移動(dòng)機(jī)械能源效率主要有兩個(gè)方面:一是提高能源的利用效率;二是實(shí)現(xiàn)能源的回收利用.移動(dòng)機(jī)械工作中的兩種主要可回收的能量形式是動(dòng)能和勢(shì)能[4],實(shí)現(xiàn)動(dòng)能和勢(shì)能的有效回收,使移動(dòng)機(jī)械能夠在原始能源的作用下運(yùn)行更長(zhǎng)時(shí)間.在移動(dòng)機(jī)械領(lǐng)域,已經(jīng)提出的能量回收形式可分為3種[5]:基于液壓蓄能器的能量回收系統(tǒng);基于蓄電池或超級(jí)電容器的能量回收系統(tǒng);基于飛輪的能量回收系統(tǒng).利用勢(shì)能進(jìn)行再生已經(jīng)廣泛應(yīng)用在電梯、挖掘機(jī)、起重機(jī)和叉車中[6-7].電動(dòng)液壓叉車作為移動(dòng)機(jī)械,具有能量轉(zhuǎn)換率高、操作靈活等特點(diǎn),可實(shí)現(xiàn)貨物的叉取、升降和堆垛等操作,被廣泛應(yīng)用在車間、食品、倉庫等對(duì)環(huán)境要求較高的作業(yè)場(chǎng)合.由于電動(dòng)叉車的功率容量有限,初始成本高,因此,電動(dòng)叉車的電能損耗尤為重要,電池的更換系統(tǒng)不具有時(shí)間效率[8-9].此外,提升裝置的提升功能和叉車的牽引力消耗了大部分能量.在設(shè)備的其他功能方面,沒有能量可回收,而且動(dòng)能水平相當(dāng)?shù)?無法有效回收能源,更加迫切地關(guān)注電動(dòng)叉車的能量效率[10].
學(xué)者們針對(duì)叉車負(fù)載和能量回收效率已經(jīng)做了大量研究[11-13].但大多以現(xiàn)有液壓叉車結(jié)構(gòu)為基礎(chǔ),對(duì)于需要更高作業(yè)范圍需求的叉車,需要兩級(jí)提升作業(yè),未從理論仿真和試驗(yàn)相結(jié)合方面,深入研究叉車的節(jié)能效率.
本文以新型電動(dòng)液壓叉車作為移動(dòng)設(shè)備的研究對(duì)象,分析了叉車升降結(jié)構(gòu),基于叉車結(jié)構(gòu)設(shè)計(jì)了能量回收系統(tǒng),建立了各主要元件的數(shù)學(xué)模型,并在Matlab/Simulink中建立了能量回收仿真模型.從能量回收的角度,通過在能量回收系統(tǒng)中使用不同的下降速度和有效載荷,對(duì)不同提升區(qū)的節(jié)能率進(jìn)行了研究,研究了不同提升區(qū)的節(jié)能效果,分析了兩個(gè)不同的提升區(qū)之間的差異,以期提高叉車的能量利用率,最大限度地實(shí)現(xiàn)能量回收利用.
1 系統(tǒng)組成
1.1 叉車升降結(jié)構(gòu)
為滿足更高的作業(yè)范圍需求,將電動(dòng)叉車的提升機(jī)構(gòu)設(shè)計(jì)為兩級(jí)提升裝置,如圖1所示.分為第1提升區(qū)(自由提升區(qū))和第2提升區(qū),自由提升區(qū)通過一個(gè)單作用液壓缸完成,第2提升區(qū)通過兩個(gè)并聯(lián)的單作用液壓缸實(shí)現(xiàn).第2提升區(qū)液壓缸固定在叉車底座上,自由提升區(qū)提升裝置可隨第2提升區(qū)液壓缸的伸縮發(fā)生相應(yīng)的位置變化.
1.2 能量回收系統(tǒng)
為實(shí)現(xiàn)升降過程中能量的回收,本文設(shè)計(jì)了電液提升能量回收系統(tǒng),以最大限度實(shí)現(xiàn)勢(shì)能回收,其系統(tǒng)原理如圖2所示.
電液提升能量回收系統(tǒng)主要由控制系統(tǒng)、供電系統(tǒng)、液壓系統(tǒng)和執(zhí)行系統(tǒng)4部分組成.控制系統(tǒng)主要實(shí)現(xiàn)對(duì)壓力、高度、電流、電壓信號(hào)的采集和處理.供電系統(tǒng)為液壓系統(tǒng)提供驅(qū)動(dòng)能量,傳統(tǒng)液壓叉車依靠鉛酸蓄電池提供能量,本實(shí)驗(yàn)裝置電能來自電網(wǎng)的直接轉(zhuǎn)矩控制(Direct Torque Control,DTC)伺服驅(qū)動(dòng)轉(zhuǎn)換器,而不是蓄電池.采用一種固定開關(guān)頻率的改進(jìn)型DTC,控制永磁同步電機(jī)驅(qū)動(dòng)器,該驅(qū)動(dòng)器直接操作泵.通過改變液壓泵/馬達(dá)的轉(zhuǎn)速實(shí)現(xiàn)提升系統(tǒng)的速度控制.
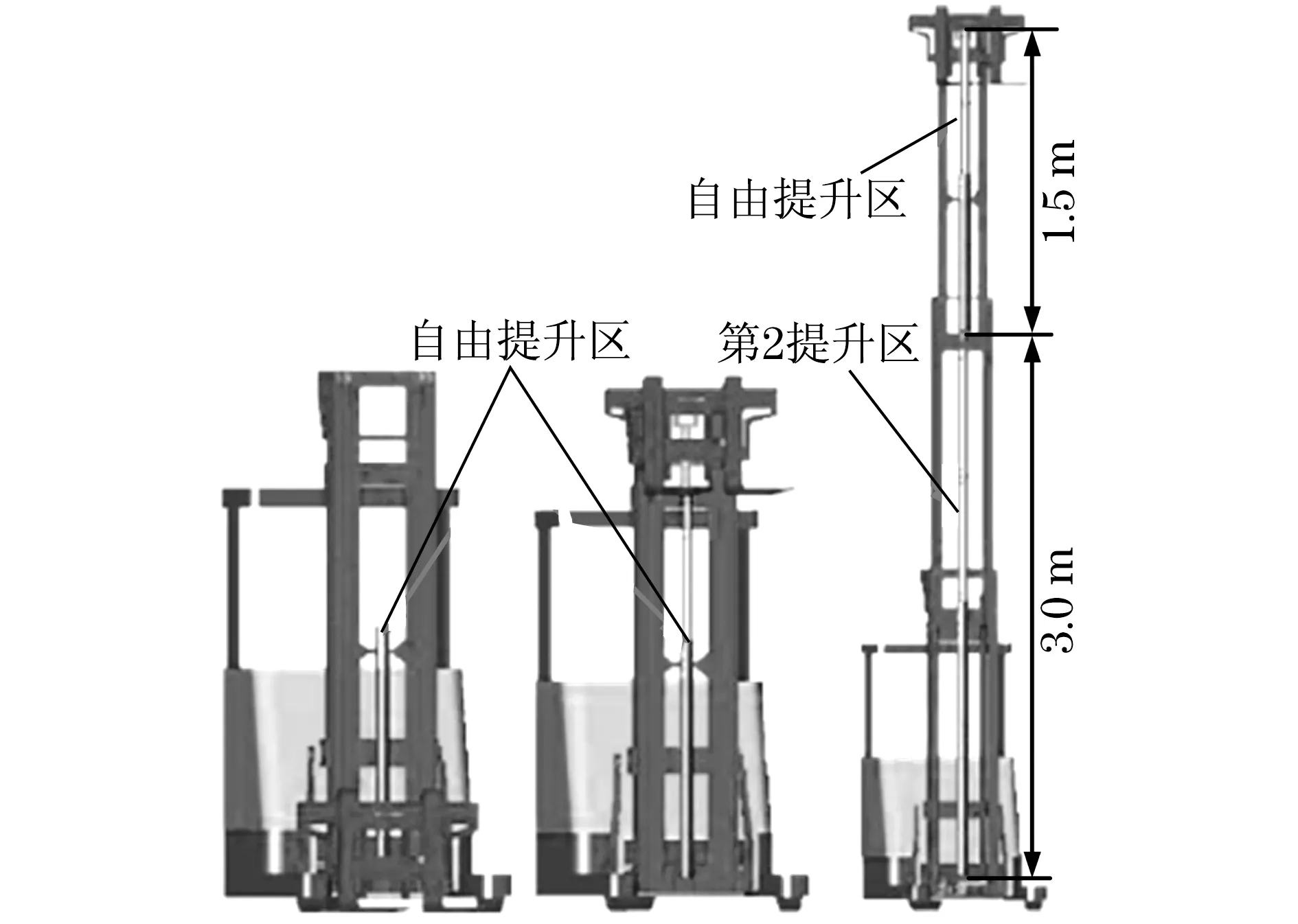
圖1 新型叉車升降結(jié)構(gòu)Fig.1 New lifting structure of forklift truck
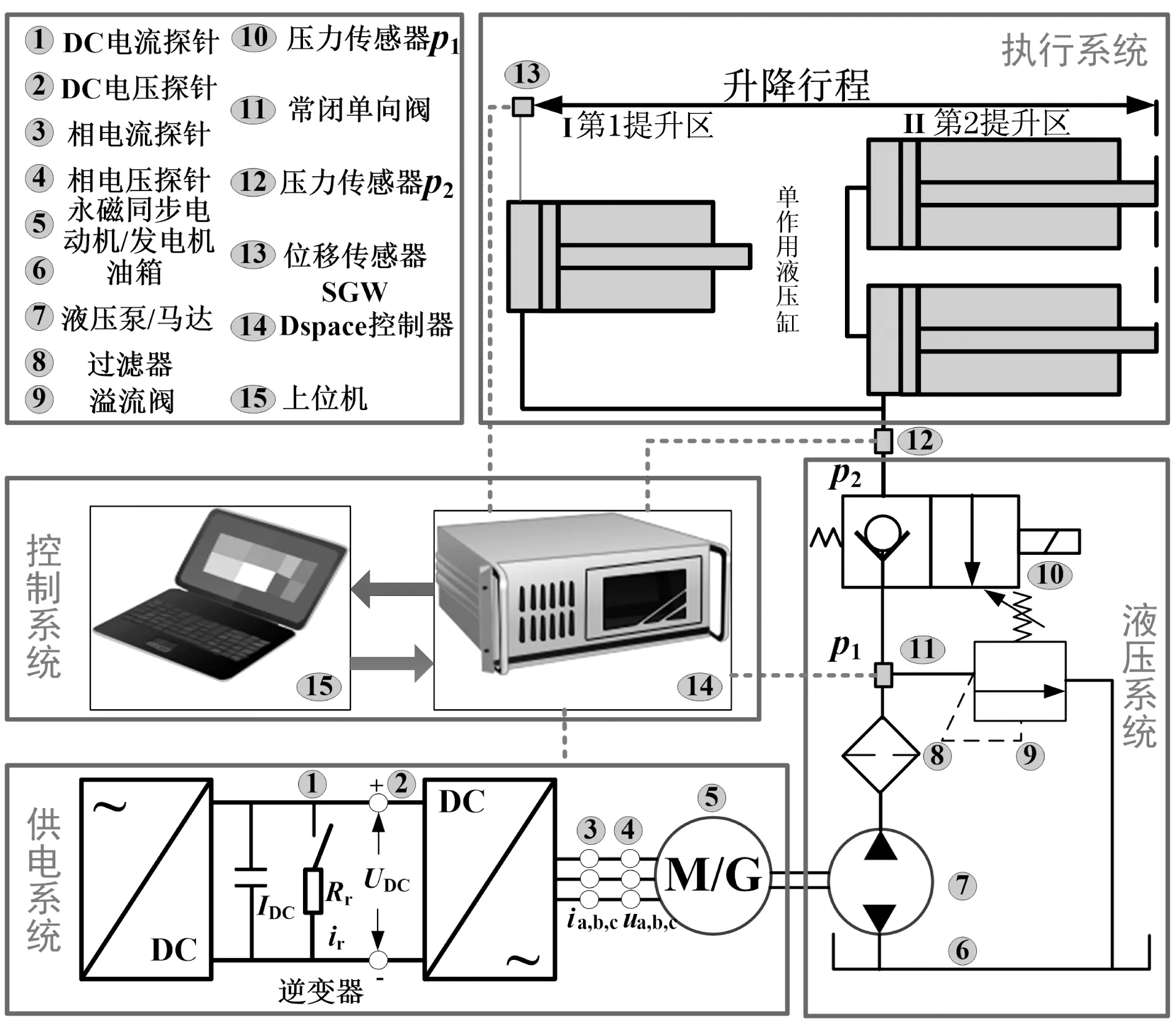
圖2 電液提升能量回收系統(tǒng)Fig.2 Electro-hydraulic lifting energy recovery system
液壓系統(tǒng)為執(zhí)行系統(tǒng)提供能量,液壓系統(tǒng)中包含的兩位常閉單向閥,可防止叉車臂意外下降.執(zhí)行系統(tǒng)包含第1液壓缸和第2液壓缸,液壓活塞連接在兩個(gè)主要的垂直桅桿上.為進(jìn)一步降低能量損耗,在整個(gè)液壓系統(tǒng)中,未使用換向閥或調(diào)速閥作用速度控制元件,直接通過調(diào)節(jié)電動(dòng)機(jī)的轉(zhuǎn)速實(shí)現(xiàn)提升區(qū)液壓缸流量和速度的控制.
本研究中采用雙向液壓泵/馬達(dá)作為能量轉(zhuǎn)換元件.在提升過程中,作為液壓泵元件,永磁同步電動(dòng)機(jī)驅(qū)動(dòng)液壓泵工作,消耗能量;下降過程中,作為液壓馬達(dá)元件,依靠重力勢(shì)能驅(qū)動(dòng)馬達(dá)旋轉(zhuǎn),進(jìn)而帶動(dòng)永磁同步電動(dòng)機(jī)發(fā)電,將電能儲(chǔ)存在逆變器中,實(shí)現(xiàn)能量回收.永磁伺服電動(dòng)機(jī)的額定效率遠(yuǎn)高于90%,具有極低的開關(guān)和導(dǎo)通損耗,因此,可進(jìn)一步的提高能量回收率.
2 數(shù)學(xué)模型建立
電動(dòng)叉車能量回收系統(tǒng)是一種混合系統(tǒng),為了得到提升區(qū)升降過程中的能量效率和節(jié)能率,建立電動(dòng)機(jī)、液壓缸和液壓泵的數(shù)學(xué)模型,進(jìn)一步建立了能源效率和節(jié)能率模型.
2.1 電動(dòng)機(jī)模型
電動(dòng)機(jī)是影響叉車勢(shì)能回收的主要因素之一,因此,有必要建立電動(dòng)機(jī)的控制模型,提高電動(dòng)機(jī)的能量轉(zhuǎn)化效率.帶有轉(zhuǎn)子表面安裝磁體的永磁同步電動(dòng)機(jī)的轉(zhuǎn)子可以被認(rèn)為是非凸,并且假定在通過電動(dòng)機(jī)中心的任何軸上都有相同的磁阻.因此,永磁同步電動(dòng)機(jī)的電流向量計(jì)算公式為
(1)
式中:ia,ib,ic為瞬時(shí)相電流.
電流向量可以分解為d軸分量id和q軸分量iq.
定子d軸和q軸的繞組磁鏈計(jì)算公式為
式中:ψPM為永磁磁鏈;Lsd,Lsq為d軸和q軸磁鏈系數(shù).
d軸和q軸的電壓計(jì)算公式為
式中:Rs為電動(dòng)機(jī)電阻;ωm為電動(dòng)機(jī)角速度;ψsd為d軸繞組磁鏈;ψsq為q軸繞組磁鏈.
在額定工況下,電動(dòng)機(jī)參數(shù)為Rs=0.193 Ω,Lsd=Lsq=0.31×10-3H.這些參數(shù)依賴于電動(dòng)機(jī)的工作點(diǎn),但電動(dòng)機(jī)參數(shù)的不確定性并不是整個(gè)系統(tǒng)的主導(dǎo)因素,因此,在本仿真中這些參數(shù)是恒定的.
電動(dòng)機(jī)角速度ωm與轉(zhuǎn)子實(shí)際轉(zhuǎn)速Ω相關(guān),計(jì)算公式為
(6)
式中:p=3為極對(duì)數(shù)數(shù)目.
非凸極永磁同步電動(dòng)機(jī)的電磁轉(zhuǎn)矩公式如下:
(7)
加速度是由電磁轉(zhuǎn)矩和負(fù)載轉(zhuǎn)矩之間的差異以及負(fù)載與電動(dòng)機(jī)的組合慣量等因素決定,其計(jì)算公式為
(8)
式中:TL為負(fù)載扭矩;Jeq=Jp+Jm為總等效轉(zhuǎn)動(dòng)慣量,其中,Jp=1.1×10-3kg·m2為負(fù)載組合慣量,Jm=88.2×10-4kg·m2為電動(dòng)機(jī)組合慣量.
空間矢量表示通常忽略鐵損耗,并且不容易將鐵損耗電阻與磁化電感并聯(lián).因此,本文給出了氣隙損耗的簡(jiǎn)化表達(dá)式,并利用減小的端電壓計(jì)算了鐵損耗,即
(9)
式中:us為磁電壓;Lm為磁化電感;Lsσ為非凸極磁化電感;RFe(f)為磁化電阻.
當(dāng)機(jī)器頻率變化時(shí),鐵損電阻隨時(shí)間的變化而變化,本文假定損耗隨頻率平方而變化.
2.2 液壓缸模型
基于活塞運(yùn)動(dòng)方程和動(dòng)態(tài)壓力方程,建立了單作用液壓缸的數(shù)學(xué)模型.根據(jù)流量連續(xù)性方程可得
(10)
式中:Be為體積模量,Be=1 400×106Pa;ps為系統(tǒng)壓力,Pa;V=V0+xpSp為液壓缸體積,m3;xp為活塞位移,m;Sp為活塞橫截面積,mm2;Qin為輸入流量,m3/s.其中,第1活塞橫截面積為Sp1=0.002 8 m2,初始體積為V0,第2活塞橫截面積為Sp2=0.002 6 m2.第1和第2活塞長(zhǎng)度分別為L(zhǎng)cy1=0.88 m和1.82 m.
根據(jù)牛頓第二定律獲得活塞的運(yùn)動(dòng)方程如下:
(11)
液壓缸摩擦力方程計(jì)算公式為
(12)
式中:σ為液壓缸黏性摩擦;Fcou為庫倫摩擦;Fso為靜態(tài)摩擦;Cs為Stribeck摩擦;對(duì)于自由提升區(qū)σ=3 000,Fcou=0.1,Fso=600,Cs=11;對(duì)于第2提升區(qū),σ=6 000,Fcou=2,Fso=600,Cs=11.
2.3 液壓泵模型
液壓泵流量方程可通過如下公式獲得:
(13)
式中:Q為泵輸出流量,m3/s;Vth=19×10-6m3/rev為泵的理論體積排量;ηvol=0.95為體積效率,是轉(zhuǎn)速和壓力的函數(shù).
泵轉(zhuǎn)動(dòng)的2階微分方程可表示為
(14)
式中:Tmotor為驅(qū)動(dòng)力矩;Tp,th壓縮流體所需的理論力矩;Tf,p為摩擦力矩.
壓縮流體的理論力矩建模如下:
(15)
式中:ps為系統(tǒng)壓力;po為回油壓力.
液壓缸內(nèi)的摩擦力矩計(jì)算公式如下:
Tf,p=TvΩ+sign(Ω)[Tcou+Tsoe-|Ω|/Cs]
(16)
式中:Tv為泵黏性摩擦.
對(duì)于第1液壓缸,Tv=1,Tcou=0.1,Tso=300,Cs=11;對(duì)于第2液壓缸,Tv=10,Tcou=0.5,Tso=300,Cs=11.
2.4 能源效率模型
叉車升降過程中能源效率η(t)與輸入、輸出能量相關(guān),在時(shí)間間隔[t1,t2]內(nèi),可定義為
(17)
式中:Eout,Ein分別為[t1,t2]時(shí)間段內(nèi)的總輸出能量和總輸入能量.
2.5 節(jié)能率模型
叉車的節(jié)能率主要與升降過程中消耗能量、回收能量相關(guān),為了研究不同提升區(qū)效率,將節(jié)能率ηr定義為
(18)
式中:E1為無能量回收時(shí)叉車的能耗;E2為具有能量回收時(shí)叉車的能耗.
在提升系統(tǒng)中,叉車能量消耗計(jì)算公式分別為
式中:Em為電動(dòng)機(jī)輸入能量;ηinv為逆變器轉(zhuǎn)換效率,假定為常數(shù)92%;Er為回收能量;ηsc為超級(jí)電容器的放電效率.
電動(dòng)機(jī)輸入能量Em和回收能量Er的計(jì)算公式如下:
式中:iabc,uabc為用傳感器探針測(cè)量的電動(dòng)機(jī)端相電流和相電壓;ir,ur分別為測(cè)量的電阻段電流和電壓.
因此,節(jié)能比ηr可根據(jù)下式重新計(jì)算:
(23)
3 結(jié)果分析
為了驗(yàn)證本文所提模型的正確性,同時(shí)研究不同因素下的節(jié)能效果,在Matlab/Simulink中建立了電動(dòng)叉車提升系統(tǒng)的微分方程,通過對(duì)比仿真和實(shí)測(cè)結(jié)果,證明所建立模型的正確性.并進(jìn)一步分析了不同下降速度和不同有效載荷下,新型電動(dòng)叉車的節(jié)能效果.
3.1 模型正確性驗(yàn)證
在提升過程中,永磁同步電動(dòng)機(jī)驅(qū)動(dòng)功率為10 kW,有效載荷為800 kg,自由提升區(qū)液壓缸伸出量為1.5 m,第2提升區(qū)液壓缸伸出量為3.0 m.下降過程中,控制貨叉速度為0.2 m/s,第2提升區(qū)和自由提升區(qū)液壓缸先后復(fù)位到初始位置.獲得不同提升區(qū)仿真和試驗(yàn)結(jié)果各參數(shù)如圖3和圖4所示.
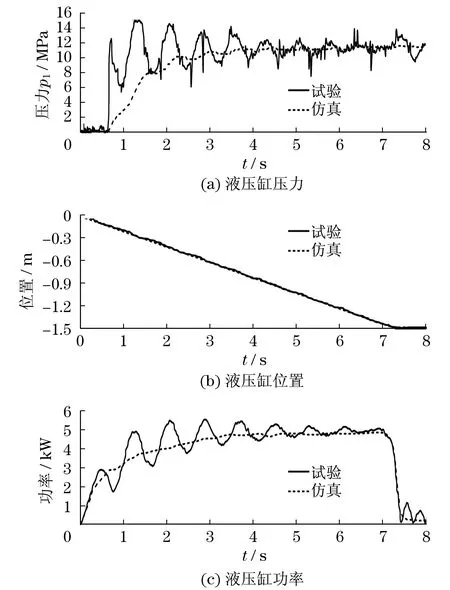
圖3 自由提升區(qū)仿真和試驗(yàn)結(jié)果Fig.3 Simulation and test results of free lifting zone

圖4 第2提升區(qū)仿真和試驗(yàn)結(jié)果Fig.4 Simulation and test results of the second hoisting zone
由圖3和圖4可以看出:當(dāng)?shù)?提升區(qū)液壓缸運(yùn)動(dòng)到最低位置和自由提升區(qū)液壓缸突然啟動(dòng)下降運(yùn)動(dòng)時(shí),會(huì)產(chǎn)生劇烈的振蕩.在兩液壓缸交叉控制過程中需要更流暢的控制.基于仿真和試驗(yàn)結(jié)果,獲得自由提升區(qū)和第2提升區(qū)各參數(shù)統(tǒng)計(jì)結(jié)果,如表1所示.
自由提升區(qū)、第2提升區(qū)仿真及試驗(yàn)結(jié)果誤差均控制在5%以內(nèi),證明了所建立數(shù)學(xué)模型和仿真模型的正確性.
此外,第2提升區(qū)的勢(shì)能是自由提升區(qū)的2倍,但第2提升區(qū)回收能量約為自由提升區(qū)的3倍.大部分的回收能量發(fā)生在第2提升區(qū),自由提升區(qū)、第2提升區(qū)回收率分別為49.5%和67.2%.
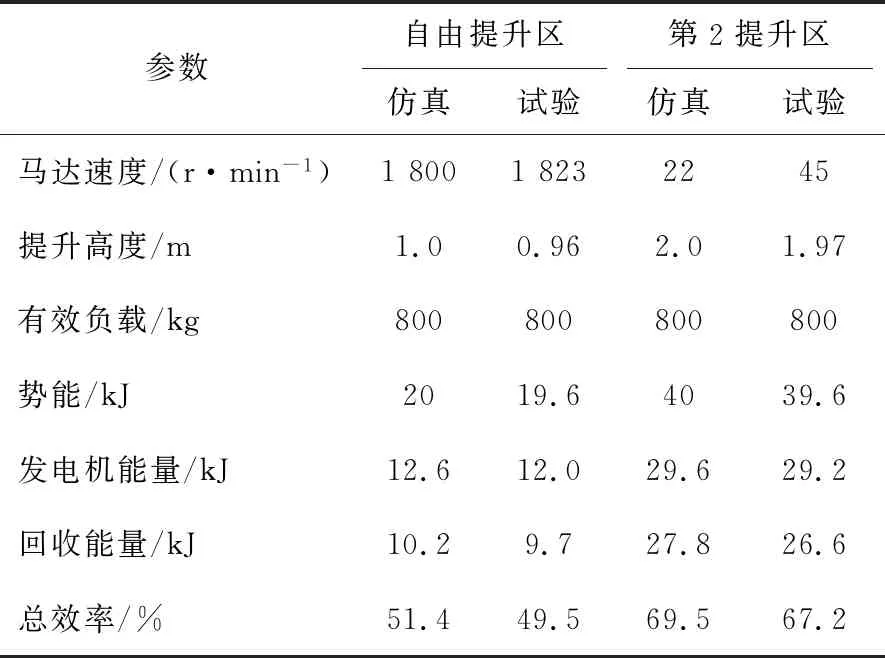
表1 不同提升區(qū)仿真和試驗(yàn)結(jié)果對(duì)比Tab.1 Comparison of simulation and test results in different hoisting zones
3.2 節(jié)能率影響因素分析
為進(jìn)一步研究不同參數(shù)下的本文所提模型的節(jié)能效果,對(duì)下降速度和有效負(fù)載下的節(jié)能率進(jìn)行了研究,以期獲得最佳的控制參數(shù).
在不同速度和有效載荷下,自由提升區(qū)和第2提升區(qū)的節(jié)能率如圖5所示,統(tǒng)計(jì)結(jié)果如表2所示.假設(shè)兩提升區(qū)貨物的提升和下降操作時(shí)間均為10 s,且提升總高度相同.

圖5 不同速度和有效載荷下節(jié)能率Fig.5 Energy-saving rate under different speeds and effective loads

表2 不同速度和有效負(fù)載下節(jié)能率Tab.2 Energy-saving rate under different speeds and effective loads
表2中可以看出:在相同負(fù)載下,自由提升區(qū)和第2提升區(qū)節(jié)能率均隨著下降速度的增加而減小.這是因?yàn)樵谧畹娃D(zhuǎn)速(0.2 m/s)時(shí),電氣損耗占主導(dǎo)地位,發(fā)電效率降低;在最高轉(zhuǎn)速(0.6 m/s)下,液壓流體摩擦損失占主導(dǎo)地位.與電氣損耗相比,液壓流體摩擦損耗要遠(yuǎn)大于電氣損耗,因此,其能量損失更大,導(dǎo)致節(jié)能率隨速度的變化而降低.
在相同下降速度下,自由提升區(qū)和第2提升區(qū)節(jié)能率均隨著有效載荷的增大先增大后減小,節(jié)能率并非與有效載荷呈正比關(guān)系.這是因?yàn)殡S著有效載荷的進(jìn)一步增大,整個(gè)回收系統(tǒng)液壓系統(tǒng)功率增大引起發(fā)熱量增大,改變了液壓系統(tǒng)和電氣系統(tǒng)的參數(shù),導(dǎo)致回收效率發(fā)生下降.
此外,在相同速度和有效負(fù)載下,第2提升區(qū)的節(jié)能率始終高于自由提升區(qū),進(jìn)一步說明了能量回收主要發(fā)生在第2提升區(qū).
從表2可以看出:在自由升降區(qū),在0 kg有效載荷下,下降過程由于負(fù)載較小,液壓缸伸出量保持不變,沒有油液通過液壓馬達(dá),無能量回收,必須依靠外力將貨叉恢復(fù)初始位置,所有的勢(shì)能都轉(zhuǎn)化為熱能損失;在第2提升區(qū)下降階段,液壓泵/馬達(dá)在所有情況下都處于馬達(dá)工況下,即使有效載荷為0 kg,同樣具有能量轉(zhuǎn)化,其節(jié)能率相當(dāng)高.
4 結(jié)語
針對(duì)傳統(tǒng)電動(dòng)叉車能源利用率低的問題,本文提出了一種適合于更高作業(yè)范圍新型電動(dòng)叉車.設(shè)計(jì)了叉車能量回收系統(tǒng),分析了能量回收系統(tǒng)工作原理,推導(dǎo)了各元件的數(shù)學(xué)模型及節(jié)能率模型.為了證明所建立數(shù)學(xué)模型的正確性,同時(shí)研究不同因素下的節(jié)能效果,在Matlab/Simulink中建立了電動(dòng)叉車提升系統(tǒng)的微分方程,通過對(duì)比仿真和實(shí)測(cè)結(jié)果,證明了所建立模型的正確性.分析了不同速度和有效載荷下兩個(gè)不同提升區(qū)之間的節(jié)能率差異.結(jié)果表明:在自由升力區(qū),節(jié)能率從0%~49.5%不等;在第2提升區(qū),節(jié)能率在23.6%~67.2%之間,系統(tǒng)最大節(jié)能效果發(fā)生在第2提升區(qū).通過合理調(diào)整升降速度和有效負(fù)載,可補(bǔ)償液壓系統(tǒng)的損失,說明本文所提回收方法是可行的.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
甘肅教育(2020年14期)2020-09-11 07:57:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
時(shí)代英語·高二(2015年1期)2015-03-16 00:08:11