基于機載LiDAR點云制作DEM及等高線的方法
2019-10-12 04:00:30秦佩陽林書范張道輕
資源導刊(信息化測繪) 2019年9期
關鍵詞:分類
秦佩陽 林書范 張道輕
(1.河南省遙感測繪院,河南 鄭州 450003;2.海口弘勘地理信息有限公司,海南 海口 570226;3.河南省征地儲備中心,河南 鄭州 450016)
1 引言
機載LiDAR 系統是集激光、全球定位系統(GPS)和慣性導航系統(IMU)技術于一體的空間測量系統[1],不受日照和天氣條件限制,能全天候對地觀測。機載激光雷達傳感器發射的激光脈沖能部分穿透樹林遮擋,獲取地面的高精度三維信息,在災害監測、資源勘查、森林調查、地形測繪等領域得到廣泛應用。以此為基礎制作的DEM 數據具有表達地貌細微、精度高的優點,成為國內外獲取DEM 的主要手段。本文基于機載LiDAR點云簡單分類,利用軟件對其進行精細分類后獲得地面點點云,制作高精度DEM,并對高精度DEM 反生出來的等高線進行處理,以滿足萬分之一制圖要求。
2 總體技術方案
對LiDAR 點云預處理后的地表點進行人工精細分類,提取精細分類后地面點云進行高精度DEM 的構建與輸出;針對不同地形DEM 反生的等高線,經過綜合處理,滿足地形圖制圖要求。具體作業流程如圖1 所示。
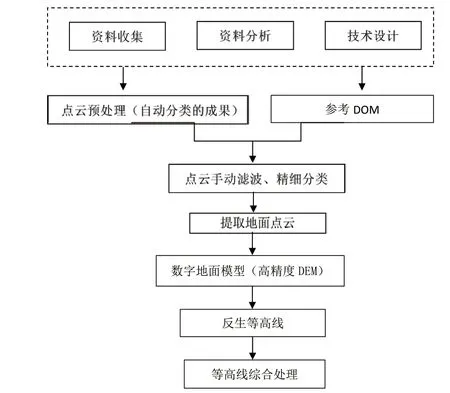
圖1 高精度DEM及等高線處理流程圖
3 點云精細分類及高精度DEM 構建
3.1 點云分類軟件和精細分類方法
3.1.1 TerraSolid 軟件介紹
TerraSolid 系列軟件是第一套商業化的LiDAR 數據處理軟件,基于MicroStation 開發運行[2]。利用TerraSolid 中 的TerraScan、TerraModel 模 塊 處 理LiDAR 點云數據,通過自動濾波、手動精細分類,設定閾值,去除各種噪聲和誤差點,尋找地面點。提取地面點是最重要的操作步驟,即濾掉非地面點的回波信號所產生的數據,如房屋、植被、交通工具及橋梁等,以得到更加貼近地表的地面點。
3.1.2 濾波基本原理
濾波的基本原理是基于真實地面與地物高程差異,針對相鄰點或點集之間的高程差,通過構建“網格”范圍并采取一定的規則進行運算,把混合在一起的屬于不同對象的點區分開來,特別是地面點與非地面點。
3.1.3 點云預處理
測量過程中因儀器誤差和被測對象的物理特性不免會混有噪聲點,相比激光點總數,噪聲點數目極少,但多數濾波算法都是以高程突變為理論依據進行濾波,最低點默認為地面點,如果噪聲點沒有被去除將影響濾波效果,因此在精細分類前去除噪聲點非常必要。
3.1.4 點云精細分類方法
經過預處理后的點云數據含地面點、植被點、建筑物點、水域點、橋點等,原始點云均在同一數據層。精細分類是將這些點分類歸屬至預先定義的正確數據層中,如地面點放在ground 層、植被點放在vegetation 層、建筑物點放在building 層等,其中重點是分出地面點,生成高精度DEM。常用濾波分類方法有數學形態學法、基于地形坡度法和基于不規則三角網的濾波算法。
(1)數學形態學法
Lindenberger 最早提出采用數學形態學法對激光點云數據進行開運算,然后通過自回歸過程改善開運算結果,自回歸運算要求激光點有序排列,適合處理有序的激光點數據[3]。目前,形態學算法應用于許多圖形圖像處理軟件,這些軟件在數據處理時常將數據規格格網化,從而導致信息損耗,特別是在地面點和地物點間進行內插,得出的高程值在地面點與地物點之間,讓內插的高程數據相比實際數據更平滑。但在地形特征信息明顯區域,如山頂、山脊線、山谷線等處,這一方法將弱化地形特征信息,使濾波分類更困難。
(2)基于地形坡度法
該算法基本思想是基于非地形坡度引起的兩相鄰點與高程差異有關的坡度值,認定其中較高的點是非地面點。在高差一定的情況下,隨著兩點間距離的減小,較高點是地面點的可能性也減小。該方法根據一個可接受的兩點間的高程差,構造兩點間的距離函數的函數。因此,兩點之間的閾值Δhmax(d)可以利用兩點間的距離來定義,即濾波函數如公式(1)所示。

公式(1)中,s 是可容許的最大地形坡度百分數;d 是兩點之間的距離;δz 為標準偏差。
(3)基于不規則三角網的濾波算法
該算法濾波的主要流程是先將點云數據進行分塊處理(分塊大小通常以測區最大地物尺寸為準),然后在塊中選取一些高程較低的點,作為原始地面點用于構建初始三角網[4]。構建好初始三角網后對非地面點P 進行判斷,如果該點到其對應三角形的距離d 以及點到三角形三個頂點之間的角度α、β、γ 均小于給定的閾值(如圖2 所示),那么該點為地面點,將該點加入初始地面點集中并重新構建TIN。然后繼續對剩余點進行判斷,經過不斷迭代,遍歷完所有的點,直至待判斷點集中不再出現滿足距離與角度閾值的點。
TerraSolid 軟件中的TerraScan 模塊對激光雷達數據的濾波采用的就是基于不規則三角網的濾波算法,通過不斷建立三角網的過程篩選出地面點。
3.2 構建高精度DEM
利用TerraScan 精細分類后,將關鍵地面點(Ground)、水點(Water)作為特征點,帶有高程信息的面狀水域范圍線和河流邊線作為特征線,采用雙線性多項式內插方法構建規則三角網,從而生產高精度DEM(如圖3 所示)。

圖2 不規則三角網濾波算法中的參數
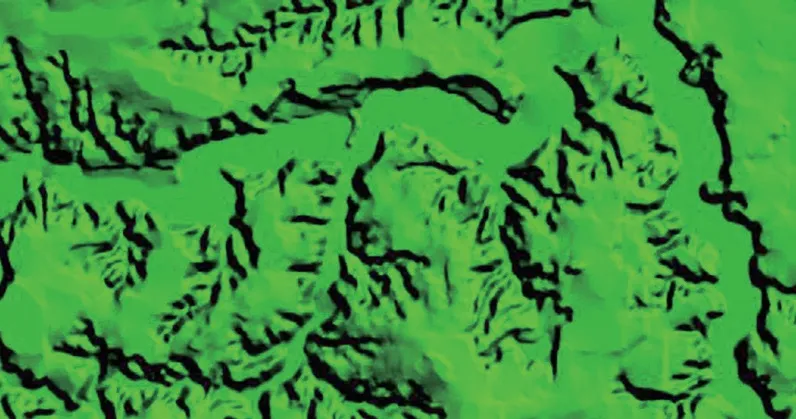
圖3 高精度DEM
4 DEM 反生等高線及綜合處理
4.1 DEM 反生的曲線存在的問題
地形圖制圖要求等高線滿足精度的同時,曲線光滑,但作業中DEM 反生的等高線,尤其是平地1 米等高距的等高線存在抖動、鋸齒狀、尖銳角、綜合取舍難、主次難分的情況(如圖4 所示),需作業人員進行分析。
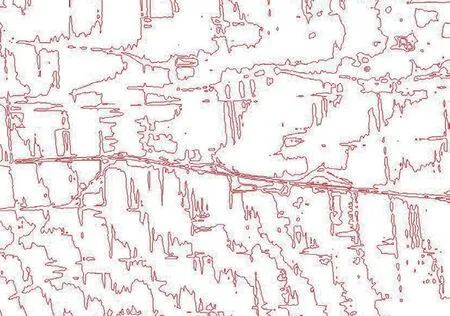
圖4 初始反生的等高線
4.2 MapMatrix 中DEM 編輯功能介紹
利用航天遠景MapMatrix 中的DEM 編輯模塊對原始DEM 進行局部平滑或全局平滑,根據不同地形設定不同的平滑度(1 ~12)(如圖5 所示),對平地可以適當加大平滑度,以滿足精度和制圖要求,丘陵山地不能平滑太厲害,以免山頭被消掉。
DEM 平滑后進行精度驗證,反生曲線和原始曲線對比不能超過半個等高距。經過上述處理后,圖6 顯示,處理前后等高線中心位置沒有發生偏移,主次分明,美觀圓滑,滿足制圖要求。

圖5 DEM平滑界面
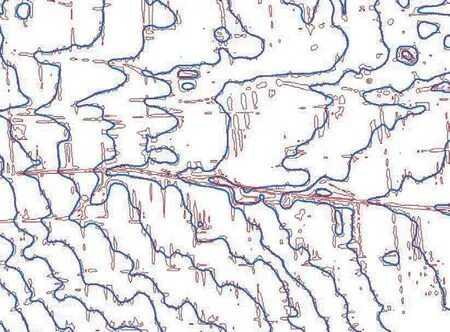
圖6 DEM平滑前后等高線精度對比
5 結語
基于機載LiDAR 點云制作DEM 及等高線的方法可以對局部地貌進行有效處理,與傳統航測立體采集相比,大大減輕了工作量,為完成河南省LiDAR 航攝生產DEM 及萬分之一基礎測繪地貌更新工作提供了借鑒和經驗。
猜你喜歡
西北民族大學學報(自然科學版)(2021年4期)2021-12-29 02:54:24
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學生天地(2019年32期)2019-08-25 08:55:22
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級語數英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46