新型軟體材料機器人技術(shù)探究
2019-10-11 04:02:38阮少偉
科技視界 2019年22期
阮少偉

【摘 要】軟體機器人是使用軟體材料制作,結(jié)構(gòu)柔軟,自由度極高,易適應(yīng)環(huán)境,具有良好的生物相容性,在醫(yī)療衛(wèi)生、教育服務(wù)、緊急救援和智能制造等方面有廣闊的應(yīng)用前景。軟體機器人的材料工藝和驅(qū)動結(jié)構(gòu)是軟體機器人功能多樣性的重要來源。本文從材料和驅(qū)動結(jié)構(gòu)兩方面介紹了近年軟體機器人的研究進展,材料方面包括了記憶合金、彈性體材料和軟體電路材料,而驅(qū)動結(jié)構(gòu)方面的研究進展則通過爬行機器人、蠕動機器人和昆蟲仿生機器人等例子來介紹。本文還分析了軟體機器人面臨的主要挑戰(zhàn),為未來的研究方向提供了指引。
【關(guān)鍵詞】軟體機器人;軟體材料;仿生
中圖分類號: TP242 文獻標(biāo)識碼: A文章編號: 2095-2457(2019)22-0040-002
DOI:10.19694/j.cnki.issn2095-2457.2019.22.016
0 前言
近5年,不斷發(fā)展的仿生學(xué)和材料學(xué)為機器人技術(shù)帶來了全新的研究方向。傳統(tǒng)機器人多由合金和工程塑料等制成,楊氏模量在109-1012Pa范圍,而生物組織如皮膚和肌肉的模量約為104-109Pa,比剛體材料小了1000倍以上[1]。因此,運用3D打印以及與生物組織模量相仿的柔性新材料可以做出與傳統(tǒng)機器人不一樣的軟體材料機器人。這類機器人具有無限的自由度,能隨意彎曲扭轉(zhuǎn)甚至變形,運作過程安全柔順,較傳統(tǒng)機器人有更強的適應(yīng)能力和更多的功能,在醫(yī)療衛(wèi)生、教育服務(wù)、緊急救援和智能制造等方面有廣闊的應(yīng)用前景。傳統(tǒng)機器人設(shè)計、生產(chǎn)和控制技術(shù)并不適用于軟體機器人,軟體機器人為機器人學(xué)開辟了全新的發(fā)展空間,其結(jié)構(gòu)原理、材料工藝、控制方法和設(shè)計理論等方面具有巨大的研究價值。
本文介紹了軟體機器人材料和驅(qū)動結(jié)構(gòu)的最新研究進展,分析了軟體機器人待解決的問題,為進一步研究提供了參考。
1 研究進展
1.1 材料
軟體機器人的關(guān)鍵在于智能柔性材料的應(yīng)用,這不光包括機器人主體的材料,也包含電路、電子零件以及電源的材料。不同的材料選擇決定了機器人的最大負載、變形、續(xù)航以及耐用度等性能。目前制作軟體機器人的主要材料有以下3種:形狀記憶合金;彈性體高分子材料;高分子復(fù)合物。此外,部分柔性電子材料也開始應(yīng)用。
形狀記憶合金是一種在受到有限的塑性形變后,可通過調(diào)節(jié)溫度使其回復(fù)到形變前狀態(tài)的材料。其原理在于記憶合金獨有的馬氏體相變,低溫時記憶合金處于可隨意變化的馬氏體,而當(dāng)達到特定溫度時,馬氏體會變成具有最低能量的奧氏體狀態(tài),這時候材料的形狀也會隨之回復(fù)原形。形狀記憶合金在一些軟體機器人中用于提供動力或控制形變, Ti-Ni型是主流的材料。
彈性體高分子材料主要是橡膠類聚合物,柔軟之余具有較大的彈性限度,屈服強度內(nèi)的拉伸不會令其受損,其應(yīng)力反應(yīng)呈非線性,力學(xué)特征要用彈性系數(shù)表示,楊氏模量只能作為其硬度的參考。彈性體楊氏模量通常在0.1-10MPa,而目前用在軟體機器人上的主要是聚硅氧烷、聚氨酯和聚丙烯酸酯,楊氏模量在0.1-1MPa[2]。
高分子復(fù)合物與彈性體材料的最大區(qū)別在于其通過在彈性體材料中添加導(dǎo)電微粒制得,具有導(dǎo)電、導(dǎo)熱性。常用的導(dǎo)電微粒包括炭黑、片狀石墨、碳納米管、納米銀箔等,也有使用可導(dǎo)電聚合物如聚苯胺和聚磺苯乙烯制作的[2]。大部分導(dǎo)電高分子復(fù)合物都有明顯的機電耦合遲滯,即無荷載時的電阻比有荷載時大,這可能是由于復(fù)合物內(nèi)的導(dǎo)電粒子非直接相連,電導(dǎo)率由電子穿隧效應(yīng)主導(dǎo),負載時導(dǎo)電粒子間的距離被壓縮導(dǎo)致更易導(dǎo)電[3]。
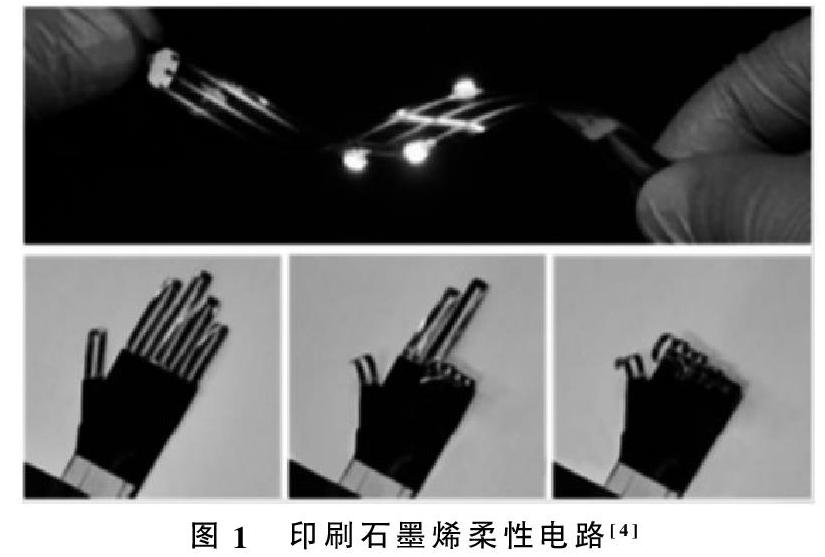
要發(fā)揮軟體機器人的潛能,讓探測和運算系統(tǒng)融合在主體中,新型智能電子材料必不可少。柔性電路是其中一種解決方案。目前柔性電路的制作技術(shù)有石墨烯印刷和誘導(dǎo)蒸鍍(圖1)[4]。此外,導(dǎo)電薄膜材料也在研發(fā)中, 1.77×10-6Ωm透光85%以上的可拉伸電路材料已成功制作出來[4]。
1.2 驅(qū)動結(jié)構(gòu)
軟體機器人的驅(qū)動結(jié)構(gòu)和傳統(tǒng)機器人完全不一樣,連續(xù)形變賦予了軟體機器人極大自由度,其驅(qū)動結(jié)構(gòu)也因此多種多樣。根據(jù)過往研究,軟體機器人的驅(qū)動結(jié)構(gòu)可歸為三類:可伸縮筋腱;流體驅(qū)動;應(yīng)激性聚合物驅(qū)動[5]。
1.2.1 可伸縮筋腱
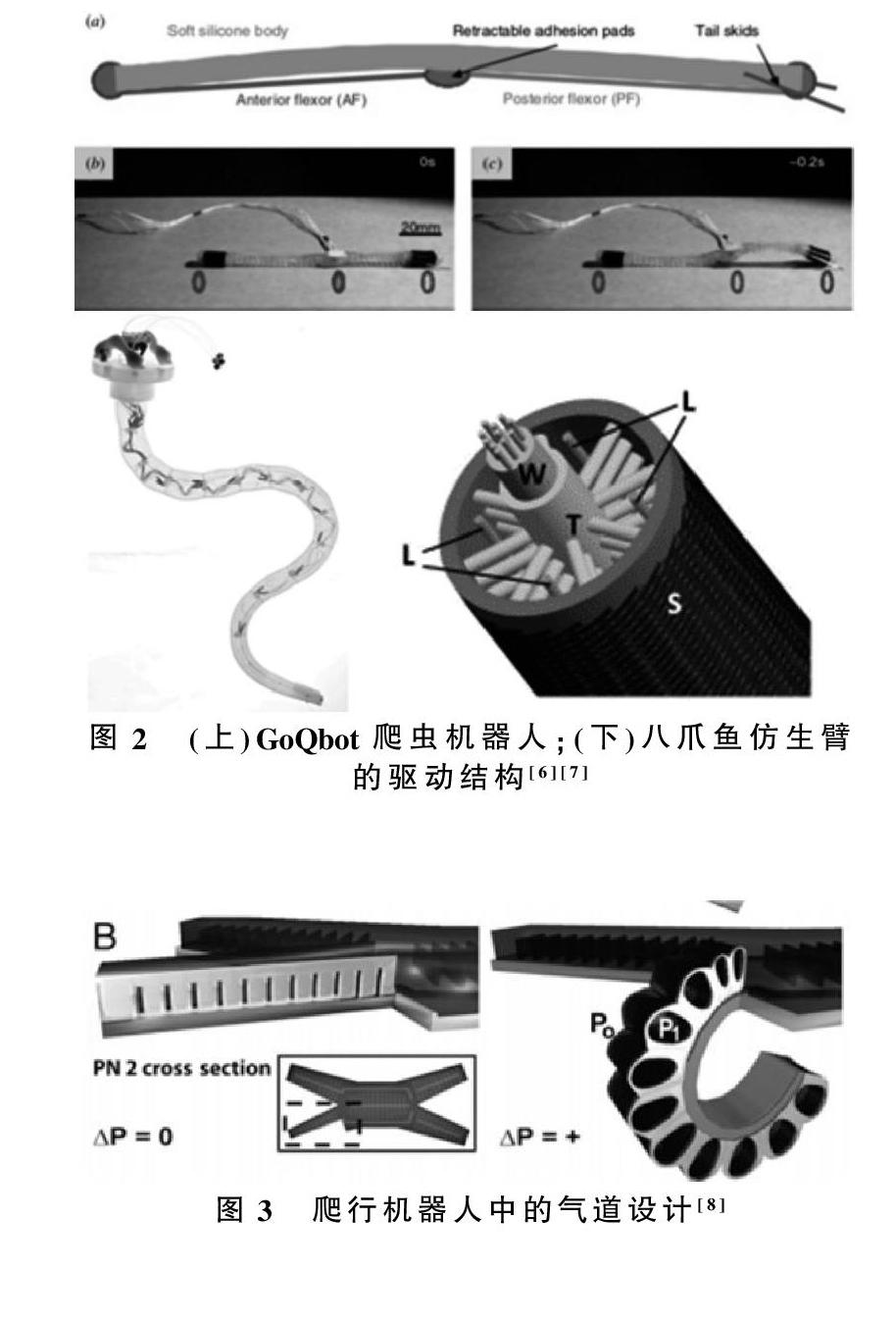
記憶合金較容易生產(chǎn)和編程,也能承受較大的形變,可伸縮筋腱就是由軟體機器人內(nèi)的記憶合金骨架組成,通過調(diào)整溫度可控制機器人形變[1]。例子有GoQbot機器蚯蚓和八爪魚仿生臂(圖2)[6][7]。
1.2.2 流體驅(qū)動
流體驅(qū)動由軟體機器人內(nèi)的管路組成,通過泵以流體為媒介控制機器人各部分形變實現(xiàn)姿態(tài)控制。爬行機器人是一個典型例子(圖3)[8]。系統(tǒng)中的氣路由一層彈性體材料和一層應(yīng)變限制材料組成。加壓時由于彈性系數(shù)不同,兩層材料形變程度不同,使得整個氣路發(fā)生彎曲,從而獲得軟體機器人運動所需的姿態(tài)。氣路彎曲的程度可由施加的壓力來控制,圖4展示了機器人穿過4cm縫隙的過程,其中拱起動作壓力為7psi,爬行動作壓力為4psi[8]。
1.2.3 應(yīng)激性聚合物驅(qū)動
應(yīng)激性聚合物指在外界刺激下有功能響應(yīng)的材料。調(diào)節(jié)刺激的強度能控制機器人的形變,實現(xiàn)姿態(tài)控制。例子有昆蟲仿生機器人,該機器人由5層薄膜構(gòu)成,包括兩層鈀-金電極,中間夾一層PVDF聚合物,此外還有一層硅膠粘合劑和一層塑料底板(圖5)[9]。通過對機器人主體施加交流電,可引起PVDF薄膜的壓電效應(yīng),使機器人產(chǎn)生伸展和收縮,從而產(chǎn)生驅(qū)動力[9]。
長度為25mm的PVDF驅(qū)動軟體機器人在200V、200Hz條件下行走速度能達到8.7cm/s,且更小的體積和更高的驅(qū)動電壓能使機器人達到更快的速度,最高可達每秒20倍自身身長[9]。
2 總結(jié)
軟體機器人是一種新型的機器人,其材料工藝、結(jié)構(gòu)原理、控制和驅(qū)動技術(shù)與傳統(tǒng)機器人完全不一樣,在多方面仍有待研究。新型的材料和驅(qū)動結(jié)構(gòu)是軟體機器人功能多樣性的核心,本文介紹了目前相關(guān)研究的最新進展,包括軟體機器人的主體材料:形狀記憶合金、彈性體高分子材料和高分子復(fù)合物,以及可伸縮筋腱驅(qū)動、流體驅(qū)動、應(yīng)激性聚合物驅(qū)動等主要驅(qū)動方式。(下轉(zhuǎn)第7頁)(上接第41頁)
3 展望
軟體機器人的研究尚處于起步階段,要發(fā)揮出軟體機器人的潛力,需要在智能柔性材料、驅(qū)動結(jié)構(gòu)等方面作進一步研究,如柔性電路、柔性電池和電子材料以及新的快速驅(qū)動結(jié)構(gòu)等都可以提升軟體機器人的性能,使其更柔軟、具有更多功能,能更廣泛由于醫(yī)療衛(wèi)生、教育服務(wù)、緊急救援和智能制造等方面。
【參考文獻】
[1]Lee,C.,Kim,M.,Kim,Y.J.,Hong,N.,Ryu,S.,Kim,H.J.,&Kim,S.(2017).Soft robot review.International Journal of Control,Automation and Systems,15(1),3-15.
[2]楊冠軍,楊華斌,曹繼敏.(2004)我國形狀記憶合金研究與應(yīng)用的新進展[J].材料導(dǎo)報,18(2),P42-44.
[3]Majidi,C.,Soft-Matter Engineering for Soft Robotics.Adv. Mater.Technol,2019,4,1800477.
[4]Invisible,stretchable circuits to shape next-gen tech(2018, February 12)[2019-08-03]https://phys.org/news/2018-02-invisible-stretchable-circuits-next-gen-tech.html.
[5]Rus,D.,&Tolley,M.T.(2015).Design,fabrication and control of soft robots.Nature,521(7553),467–475.
[6]Menciassi,A.,Gorini,S.,Pernorio,G.,Dario,P.ASMA Actuated Artificial Earthworm.IEEE International Conference on Robotics and Automation,2004.
[7]Laschi,C.,Cianchetti,M.,Mazzolai,B.,Margheri,L.,F(xiàn)ollador, M.,&Dario,P.(2012).Soft Robot Arm Inspired by the Octopus. Advanced Robotics,26(7),709–727.
[8]Shepherd,R.,Ilievski,F(xiàn).,Choi,W.,Morin,S.,Stokes,A.,Mazzeo,A.,Chen,X.(2011)Multigait soft robot.Proc Natl Acad Sci USA,108(51),20400-20403.
[9]Wu,Y.,Yim,J.,Liang,J.,Shao,Z.,Qi,M.,Zhong,J.,Luo,Z.,Yan,X.,Zhang,M.,Wang,X.,F(xiàn)earing,R.,F(xiàn)ull,R.,Lin,L.(2019).Insect-scale fast moving and ultrarobust soft robot.Science Robotics,4.eaax1594.
