基于EDEM-Fluent的氣動(dòng)式魚(yú)塘投飼機(jī)性能優(yōu)化
2019-10-10 02:45:18趙思琪丁為民趙三琴顧家冰張建凱
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2019年9期
趙思琪 丁為民,2 趙三琴,2 顧家冰,2 張建凱
(1.南京農(nóng)業(yè)大學(xué)工學(xué)院, 南京 210031; 2.江蘇省智能化農(nóng)業(yè)裝備重點(diǎn)實(shí)驗(yàn)室, 南京 210031)
0 引言
隨著大規(guī)模高密度水產(chǎn)養(yǎng)殖模式的發(fā)展,飼料已成為養(yǎng)殖過(guò)程主要的成本因素,約占總養(yǎng)殖成本的60%[1-2],投飼機(jī)作為投飼工序的核心裝備,其作業(yè)性能直接影響飼料利用效率和養(yǎng)殖效益。
針對(duì)當(dāng)前大面積高密度養(yǎng)殖水域的作業(yè)需求,氣動(dòng)式投飼技術(shù)得以迅速發(fā)展[3-5],借助氣力輸送技術(shù)實(shí)現(xiàn)飼料遠(yuǎn)距離輸送,經(jīng)拋料機(jī)構(gòu)高速轉(zhuǎn)動(dòng)將飼料360°拋撒至水面,完成投飼過(guò)程。在實(shí)際應(yīng)用中,由于給料箱與拋料結(jié)構(gòu)相距較遠(yuǎn),現(xiàn)有氣動(dòng)式投飼機(jī)以偏置式進(jìn)料、離心式拋撒為主,但普遍存在拋料不均勻問(wèn)題[6-8],研究表明飼料分布不均勻不僅會(huì)降低魚(yú)類攝食效率,而且會(huì)增加魚(yú)群體間競(jìng)爭(zhēng)強(qiáng)度,影響飼料利用率和魚(yú)群同等生長(zhǎng)[9-10]。為提高氣動(dòng)式投飼機(jī)拋料均勻性,國(guó)外專家學(xué)者通過(guò)建立投飼機(jī)拋料機(jī)構(gòu)數(shù)學(xué)模型,分析風(fēng)速、顆粒大小、拋料角度對(duì)飼料分布的影響,以優(yōu)化拋料性能,但難以從根本上解決不均勻性問(wèn)題[11-12];目前國(guó)內(nèi)相關(guān)研究主要集中在整機(jī)結(jié)構(gòu)設(shè)計(jì)和控制系統(tǒng)研究[13-15],對(duì)影響拋料性能的主要因素及優(yōu)化改進(jìn)方案研究較少。近年來(lái),隨著計(jì)算機(jī)技術(shù)的發(fā)展,離散元素法(Discrete element method,DEM)及其數(shù)值模擬仿真軟件EDEM在農(nóng)業(yè)顆粒物料運(yùn)動(dòng)分析方面得到廣泛應(yīng)用[16-17],為研究離散飼料顆粒與拋料機(jī)構(gòu)相互作用等提供了良好的平臺(tái)和手段。同時(shí),F(xiàn)luent作為一種有效的三維流場(chǎng)分析軟件,包含豐富而先進(jìn)的湍流模型,可以精確模擬分析無(wú)粘流、層流、湍流等流場(chǎng),實(shí)現(xiàn)對(duì)流場(chǎng)內(nèi)不同空間壓力、濃度、速度等物理量的研究,為研究氣力輸送過(guò)程提供了良好的平臺(tái)基礎(chǔ)[18]。因此,本文以傳統(tǒng)氣動(dòng)式投飼機(jī)為研究對(duì)象,應(yīng)用EDEM-Fluent耦合方法[19-20]建立氣動(dòng)式投飼機(jī)拋料機(jī)構(gòu)的運(yùn)動(dòng)學(xué)仿真模型,研究飼料顆粒在拋料作業(yè)中運(yùn)動(dòng)過(guò)程,分析影響投飼機(jī)拋料不均勻的主要原因,在此基礎(chǔ)上提出相應(yīng)優(yōu)化改進(jìn)方案,探討各因素及其相互作用對(duì)拋料均勻性的影響規(guī)律,以得到提高拋料性能的最優(yōu)設(shè)計(jì)參數(shù)組合,并對(duì)改進(jìn)效果進(jìn)行仿真和場(chǎng)地試驗(yàn)驗(yàn)證。
1 氣動(dòng)式投飼機(jī)結(jié)構(gòu)與工作原理
如圖1所示,氣動(dòng)式投飼機(jī)結(jié)構(gòu)主要包括料箱、拋料盤(pán)、進(jìn)料管、進(jìn)料室、交流電動(dòng)機(jī)、支架等部件。

圖1 氣動(dòng)式投飼機(jī)結(jié)構(gòu)示意圖Fig.1 Structure diagrams of pneumatic feeder1.拋料盤(pán) 2.進(jìn)料管 3.進(jìn)料室 4.交流電動(dòng)機(jī) 5.支撐底座 6.支架 7.浮球 8.拋料葉片 9.動(dòng)力軸 10.導(dǎo)流板
關(guān)鍵部件為拋料盤(pán)和進(jìn)料室,拋料盤(pán)由上下圓板和葉片組成,圓板半徑R1為270 mm,葉片長(zhǎng)、寬為195、72 mm,截面為矩形,共12條,徑向繞動(dòng)力軸均布在拋料盤(pán)內(nèi),作業(yè)時(shí)拋料盤(pán)以角速度ω高速旋轉(zhuǎn),對(duì)飼料起到負(fù)壓吸送和離心拋撒作用;進(jìn)料室由腔體和導(dǎo)流板組成,腔體主要起到對(duì)氣固兩相流的混合和過(guò)渡輸送作用,進(jìn)料室內(nèi)徑R2為50 mm,進(jìn)料室高度h為110 mm,腔體底部進(jìn)料口為圓面,進(jìn)料管內(nèi)徑R3為35 mm;導(dǎo)流板主要起到引流和均分飼料的作用,將飼料流均勻往左右兩個(gè)半腔引流,有利于飼料在腔內(nèi)均勻混合,由寬度30 mm、長(zhǎng)度70 mm的“L”型角鐵制作,安置在料腔底部進(jìn)料口中間位置。
拋料工作原理:拋料盤(pán)高速旋轉(zhuǎn)使投飼機(jī)和輸料管內(nèi)部產(chǎn)生負(fù)壓吸力,將前端料箱供給的飼料在負(fù)壓氣力作用下沿輸料管進(jìn)入進(jìn)料室內(nèi),經(jīng)導(dǎo)流板均分引流后沿室壁進(jìn)入腔體內(nèi)部混合,進(jìn)而在氣力作用下向上輸送至拋料盤(pán),在水平拋料盤(pán)高速旋轉(zhuǎn)作用下沿徑向葉片導(dǎo)軌做加速運(yùn)動(dòng),至料盤(pán)邊緣以一定速度拋出后做類平拋運(yùn)動(dòng),最后落入水面完成投飼過(guò)程。
2 顆粒飼料運(yùn)動(dòng)特性分析
2.1 飼料顆粒在離心盤(pán)上的運(yùn)動(dòng)
假定飼料顆粒為剛性質(zhì)點(diǎn),質(zhì)量為m,因拋料盤(pán)內(nèi)氣流對(duì)飼料質(zhì)點(diǎn)的作用力遠(yuǎn)小于離心力,在此忽略不計(jì)[21]。則飼料顆粒模型在拋料盤(pán)內(nèi)受力分析如圖2所示。

圖2 飼料顆粒模型受力分析Fig.2 Force analysis of feed particle model
顆粒隨拋料盤(pán)做繞軸轉(zhuǎn)動(dòng)和沿葉片滑移的合成運(yùn)動(dòng),由圖可知,顆粒所受離心力F1為
F1=mω2l
(1)
式中l(wèi)——飼料顆粒與拋料盤(pán)中心線垂直距離,mm
顆粒所受科氏力Fk為
(2)
葉片側(cè)面對(duì)顆粒的摩擦力Ff為
(3)
式中μ——飼料顆粒與拋料葉片之間摩擦因數(shù)
顆粒重力引起的摩擦力F2為
F2=μmg
(4)
則沿OA方向,由牛頓第二定律得
(5)
式中r0——拋料葉片末端與拋料盤(pán)中心線垂直距離,mm
解式(5)得飼料顆粒在離心盤(pán)內(nèi)的運(yùn)動(dòng)方程為
(6)

(7)
(8)
(9)
(10)
2.2 飼料顆粒脫離拋料盤(pán)后的運(yùn)動(dòng)
飼料顆粒以一定速度脫離拋料盤(pán)后,經(jīng)類平拋運(yùn)動(dòng)最終落入水面,在空氣域中受重力、空氣阻力等作用。因飼料顆粒較小,在無(wú)邊界的空氣流體中可以將飼料顆粒的圓柱形狀近似于球面進(jìn)行分析[22],則在空氣中運(yùn)動(dòng)時(shí),空氣阻力Fa為
(11)
式中Cd——空氣阻力系數(shù)
ρ1——空氣密度,kg/m3
rp——飼料顆粒當(dāng)量半徑,mm
v——飼料顆粒相對(duì)空氣速度,m/s
以離心盤(pán)水平面為xy面,以垂直盤(pán)方向與重力同向?yàn)閦軸,則飼料顆粒在空中3個(gè)方向運(yùn)動(dòng)方程為
(12)
(13)
(14)

(15)
式中vx——沿x方向速度分量,m/s
vy——沿y方向速度分量,m/s
vz——沿z方向速度分量,m/s
通過(guò)對(duì)飼料在拋料盤(pán)上的運(yùn)動(dòng)分析(式(6))可知,飼料顆粒的拋撒速度取決于拋料盤(pán)轉(zhuǎn)速、拋料盤(pán)半徑和飼料顆粒與拋料盤(pán)初始接觸位置,而飼料顆粒的拋撒速度決定了投飼機(jī)的最大投飼距離、投飼面積等基本作業(yè)參數(shù),為保證在進(jìn)行投飼均勻性能改進(jìn)的同時(shí)投飼機(jī)的基本作業(yè)參數(shù)不受影響,以滿足實(shí)際工況及投飼機(jī)標(biāo)準(zhǔn)[24]中有關(guān)投飼機(jī)基本作業(yè)參數(shù)的要求,在EDEM-Fluent仿真時(shí)應(yīng)設(shè)置邊界條件拋料盤(pán)轉(zhuǎn)速和半徑保持不變(符合實(shí)際作業(yè)工況)。飼料顆粒隨拋料盤(pán)做繞軸轉(zhuǎn)動(dòng)和沿葉片滑移的合成運(yùn)動(dòng),運(yùn)動(dòng)分析知其在脫離拋料盤(pán)后應(yīng)做斜拋曲線運(yùn)動(dòng),對(duì)飼料脫離拋料盤(pán)的運(yùn)動(dòng)軌跡分析可與EDEM-Fluent仿真結(jié)果中飼料顆粒的軌跡進(jìn)行對(duì)比驗(yàn)證。
3 拋料過(guò)程仿真分析
3.1 三維仿真模型構(gòu)建與物料特性參數(shù)選擇
為便于模擬和分析,去除圖1中與飼料運(yùn)動(dòng)過(guò)程接觸無(wú)關(guān)的部件,應(yīng)用Pro/E三維軟件進(jìn)行實(shí)體建模并以.igs格式導(dǎo)入EDEM中,如圖3所示。研究表明在氣動(dòng)式投飼機(jī)拋料過(guò)程中,飼料顆粒大小對(duì)飼料分布規(guī)律性沒(méi)有顯著性影響[10-11],因此,本文以國(guó)內(nèi)池塘養(yǎng)殖常用的3 mm柱形顆粒飼料為研究對(duì)象進(jìn)行氣動(dòng)式投飼機(jī)拋料性能分析研究,參照文獻(xiàn)[16-17,25-27]中相關(guān)研究及試驗(yàn)方法,對(duì)飼料顆粒物理特性參數(shù)進(jìn)行給定和測(cè)定,確定仿真參數(shù)如表1所示。EDEM-Fluent選擇Eulerian-Eulerian雙歐拉模型進(jìn)行耦合,采用Fluent軟件中k-ε湍流模型,由于飼料顆粒之間無(wú)黏連、顆粒表面光滑,在此采用EDEM軟件中Hertz-Mindlin無(wú)滑動(dòng)接觸模型進(jìn)行仿真。根據(jù)前面對(duì)飼料顆粒的運(yùn)動(dòng)學(xué)分析,為確保投飼機(jī)的相關(guān)基本作業(yè)參數(shù)不受影響,根據(jù)實(shí)測(cè)值設(shè)定拋料盤(pán)轉(zhuǎn)速為2 800 r/min,入口風(fēng)速根據(jù)實(shí)測(cè)值設(shè)定為24 m/s,設(shè)置顆粒工廠以2 000顆/s(即最大投飼能力)的速率生成飼料顆粒,進(jìn)行飼料顆粒運(yùn)動(dòng)仿真分析,參數(shù)設(shè)置貼近實(shí)際魚(yú)塘作業(yè),以提高模擬仿真的準(zhǔn)確性。

圖3 拋料機(jī)構(gòu)仿真圖Fig.3 Simulation diagrams of parabolic mechanism

表1 物料特性參數(shù)Tab.1 Material properties of particles
3.2 仿真試驗(yàn)設(shè)計(jì)與試驗(yàn)指標(biāo)
根據(jù)離心式拋撒機(jī)械性能評(píng)價(jià)標(biāo)準(zhǔn)[22,28],使用飼料周向分布變異系數(shù)作為拋撒均勻性能評(píng)價(jià)指標(biāo)。應(yīng)用EDEM后處理Selection模塊,以拋料盤(pán)中心為圓心,半徑為22 m(場(chǎng)地試驗(yàn)得氣動(dòng)投飼機(jī)最大拋撒距離)的圓面上均勻分成12個(gè)圓心角為30°的扇形計(jì)算網(wǎng)格(圖4),將落入每個(gè)計(jì)算網(wǎng)格內(nèi)的飼料總質(zhì)量進(jìn)行統(tǒng)計(jì),計(jì)算飼料周向分布變異系數(shù)
(16)
其中
(17)
(18)
式中Cv——周向分布變異系數(shù),%
S——標(biāo)準(zhǔn)差,g
n——計(jì)算網(wǎng)格數(shù)量
M0——收集域內(nèi)網(wǎng)格收集飼料質(zhì)量平均值,g
Mi——第i個(gè)計(jì)算網(wǎng)格收集飼料顆粒總質(zhì)量,g

圖4 EDEM中計(jì)算網(wǎng)格布置圖Fig.4 Layout diagram of computational grid in EDEM
3.3 拋料性能虛擬仿真結(jié)果與分析
運(yùn)用EDEM-Fluent耦合方法對(duì)投飼機(jī)拋料性能進(jìn)行虛擬仿真試驗(yàn),以確定造成拋料不均勻的主要原因。為保證仿真的連續(xù)性和可靠性,設(shè)置固定時(shí)間步長(zhǎng)為2×10-5s,為Rayleigh步長(zhǎng)的18%,總時(shí)間為1 s。如圖5所示,以飼料顆粒流為研究對(duì)象,設(shè)置其以流線型(stream)顯示,圖中彩色流線表示粒子運(yùn)動(dòng)軌跡,不同顏色變化代表運(yùn)動(dòng)過(guò)程速度變化,表示顆粒在拋料過(guò)程的運(yùn)動(dòng)狀態(tài),可以發(fā)現(xiàn)其在拋料盤(pán)內(nèi)和脫離拋料盤(pán)后的運(yùn)動(dòng)軌跡與飼料顆粒理論運(yùn)動(dòng)特性分析相一致,在脫離拋料盤(pán)后呈現(xiàn)斜拋曲線運(yùn)動(dòng)軌跡。同時(shí),從圖5和圖6可知,在進(jìn)料腔內(nèi)氣流對(duì)飼料顆粒作用明顯,飼料顆粒在氣流作用下沿進(jìn)料腔左側(cè)壁(進(jìn)料口對(duì)側(cè))被帶入拋料盤(pán),呈明顯偏置分布狀態(tài),這與氣流流場(chǎng)分布一致,進(jìn)入拋料盤(pán)后氣流場(chǎng)作用減弱,主要受拋料盤(pán)高速旋轉(zhuǎn)離心作用,隨拋料盤(pán)做繞軸轉(zhuǎn)動(dòng)和沿葉片滑移的合運(yùn)動(dòng),這與實(shí)際作業(yè)過(guò)程一致。圖7為飼料顆粒拋撒分布圖,飼料顆粒在整個(gè)投飼區(qū)周向呈現(xiàn)倒“V”形的分布,周向分布變異系數(shù)Cv為62.16%,在0°~60°和270°~360°扇形區(qū)域分布最為集中,占總顆粒量的64.72%,這與實(shí)際情況相符合,同時(shí)與飼料顆粒和氣流場(chǎng)在進(jìn)料腔內(nèi)的分布一致,均呈現(xiàn)明顯偏向一側(cè)。分析可知保證飼料顆粒能夠均勻輸送至拋料盤(pán)內(nèi),是解決拋撒不均勻的關(guān)鍵,而進(jìn)料腔和導(dǎo)流板結(jié)構(gòu)是影響腔體內(nèi)氣流場(chǎng)分布和飼料顆粒分布的關(guān)鍵結(jié)構(gòu)。

圖5 拋料過(guò)程性能仿真Fig.5 Performance simulation diagram of throwing process

圖6 拋料過(guò)程進(jìn)料室氣流場(chǎng)仿真Fig.6 Performance simulation diagrams of air flow field in feeding chamber during throwing process

圖7 飼料顆粒周向分布Fig.7 Pellet circumferential distribution
4 結(jié)構(gòu)優(yōu)化設(shè)計(jì)與仿真
4.1 結(jié)構(gòu)優(yōu)化設(shè)計(jì)及分析

圖8 氣動(dòng)式投飼機(jī)拋料結(jié)構(gòu)改進(jìn)示意圖Fig.8 Structure diagram for improvement of pneumatic feeder
為從根本上解決拋料不均勻問(wèn)題,根據(jù)3.3節(jié)分析,對(duì)進(jìn)料腔體和導(dǎo)流板結(jié)構(gòu)進(jìn)行改進(jìn)設(shè)計(jì)(圖8)。將進(jìn)料腔設(shè)計(jì)為由外腔和內(nèi)腔兩部分組成,實(shí)現(xiàn)內(nèi)腔進(jìn)料口與外腔進(jìn)料口錯(cuò)位布置,以優(yōu)化腔體內(nèi)氣流場(chǎng)分布和提高氣固有效混合時(shí)間和空間,飼料顆粒在氣流帶動(dòng)下首先進(jìn)入外腔體氣固混合,然后經(jīng)內(nèi)腔體底部開(kāi)口從兩側(cè)進(jìn)入內(nèi)腔(圖8紅色箭頭)并在氣流作用下沿內(nèi)腔壁送入拋料盤(pán),為不影響結(jié)構(gòu)安裝及機(jī)器作業(yè),設(shè)計(jì)外腔體半徑Ro為75 mm,外腔體高度ho為80 mm,內(nèi)腔體尺寸與第1節(jié)所述相同。同時(shí)改進(jìn)導(dǎo)流板為圓弧形,左右對(duì)置各一個(gè),使氣固混合流可以沿著內(nèi)壁切線方向進(jìn)入外腔體,并只能從內(nèi)腔體輸送至拋料盤(pán),有利于改善腔內(nèi)氣固分布狀態(tài),為不影響入口進(jìn)料,設(shè)計(jì)半徑與改進(jìn)前進(jìn)料室內(nèi)徑R2相同,導(dǎo)流板圓心角α為90°。
圖9和圖10為改進(jìn)后拋料過(guò)程仿真結(jié)果,可以發(fā)現(xiàn)混合室內(nèi)飼料顆粒和氣流場(chǎng)在整個(gè)內(nèi)腔體基本均勻分布,不存在偏置現(xiàn)象,飼料顆粒在氣流作用下可以較均勻的從內(nèi)腔輸送至拋料盤(pán)內(nèi),完成拋撒作業(yè)。圖11為改進(jìn)后飼料顆粒周向分布情況,各個(gè)區(qū)域內(nèi)飼料顆粒質(zhì)量分?jǐn)?shù)在8%上下浮動(dòng),各區(qū)域間的分布差異性明顯降低,周向分布變異系數(shù)Cv為16.49%,同改進(jìn)前相比降低48.23個(gè)百分點(diǎn),可以更好地滿足機(jī)具作業(yè)需求,其中出現(xiàn)的浮動(dòng)主要是由料腔內(nèi)形成的兩個(gè)小的湍流團(tuán)引起。
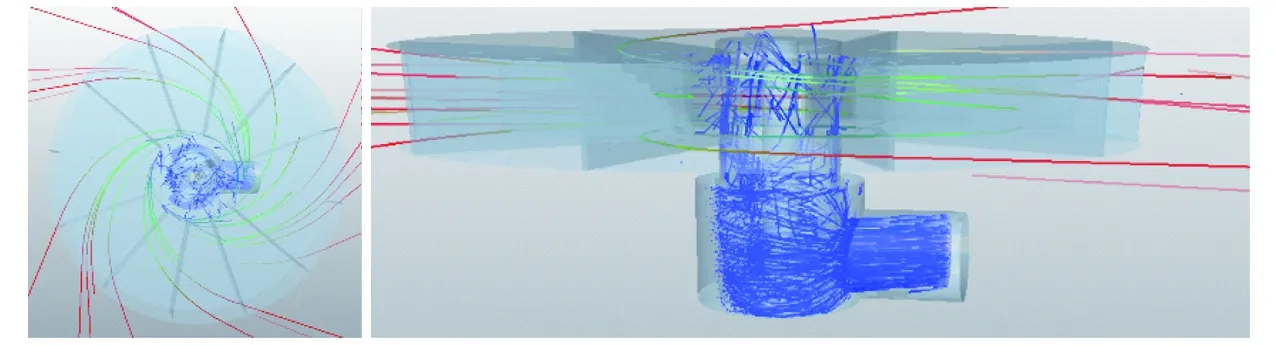
圖9 改進(jìn)后拋料過(guò)程性能仿真Fig.9 Performance simulation diagram of throwing process after improvement

圖10 改進(jìn)后拋料過(guò)程進(jìn)料室氣流場(chǎng)仿真Fig.10 Performance simulation diagrams of air flow field in feeding chamber during throwing process after improvement

圖11 改進(jìn)后飼料顆粒分布Fig.11 Pellet distribution after improvement
4.2 正交回歸旋轉(zhuǎn)中心仿真優(yōu)化
在對(duì)拋料結(jié)構(gòu)優(yōu)化改進(jìn)的基礎(chǔ)上,研究關(guān)鍵設(shè)計(jì)參數(shù):外腔體半徑、外腔體高度和導(dǎo)流板圓心角對(duì)拋料性能的影響,并通過(guò)分析優(yōu)化出投飼機(jī)拋料機(jī)構(gòu)最優(yōu)設(shè)計(jì)參數(shù)組合。根據(jù)實(shí)際安裝和作業(yè)需求,設(shè)置試驗(yàn)因素取值范圍分別為:外腔體半徑70~80 mm;外腔體高度70~100 mm;導(dǎo)流板圓心角80°~100°。以外腔體半徑Ro、外腔體高度ho和導(dǎo)流板圓心角α為影響因素,飼料顆粒周向分布變異系數(shù)Cv為評(píng)價(jià)指標(biāo),采用Design-Expert 8.06軟件設(shè)計(jì)三元二次回歸正交旋轉(zhuǎn)組合試驗(yàn),試驗(yàn)因素編碼見(jiàn)表2,仿真方案和仿真試驗(yàn)結(jié)果如表3所示。

表2 試驗(yàn)因素編碼Tab.2 Coding of factors
4.2.1試驗(yàn)結(jié)果方差分析
對(duì)試驗(yàn)結(jié)果進(jìn)行多元回歸擬合分析,得到周向分布變異系數(shù)方差分析如表4所示,二次回歸模型高度顯著(P<0.000 1),失擬項(xiàng)(P=0.076 7>0.05)不顯著,回歸方程不失擬,說(shuō)明可以用回歸方程代替試驗(yàn)真實(shí)點(diǎn)對(duì)試驗(yàn)結(jié)果進(jìn)行分析,方程較好地表征了周向分布變異系數(shù)與外腔體半徑、外腔體高度和導(dǎo)流板圓心角的相關(guān)關(guān)系。經(jīng)逐步回歸法剔除不顯著項(xiàng)后,得到Cv對(duì)外腔體半徑、外腔體高度和導(dǎo)流板圓心角的二次多元回歸方程

表3 試驗(yàn)方案和結(jié)果Tab.3 Test plan and results

圖12 周向分布變異系數(shù)的雙因素交互響應(yīng)曲面Fig.12 Response surfaces of two factors for variation coefficient of circumferential distribution
(19)
4.2.2響應(yīng)曲面分析
由表4知,Roho和hoα對(duì)周向分布變異系數(shù)影響顯著,Roα對(duì)其影響不顯著,在此對(duì)Roho和hoα交互作用對(duì)變異系數(shù)的影響效應(yīng)進(jìn)行分析。圖12a為α取90°時(shí),外腔體半徑Ro與外腔體高度ho交互作用響應(yīng)曲面圖,由圖知外腔體高度ho在70~85 mm范圍時(shí)隨著ho的增大變異系數(shù)逐漸降低,在85~100 mm范圍內(nèi)時(shí)對(duì)變異系數(shù)的影響規(guī)律相反,但影響程度減弱;外腔體半徑Ro在70~75 mm范圍時(shí)隨著Ro的增加周向分布變異系數(shù)逐漸降低,在75~80 mm范圍內(nèi)影響規(guī)律相反。當(dāng)外腔體半徑Ro在74~78 mm,外腔體高度ho在80~90 mm之間時(shí),周向變異系數(shù)Cv均較小。

表4 周向分布變異系數(shù)方差分析Tab.4 Variance analysis of variation coefficient for circumferential distribution
注:** 表示影響高度顯著(P<0.01);*表示影響顯著(P<0.05)。
圖12b為Ro取75 mm時(shí),外腔體高度ho與導(dǎo)流板圓心角α交互作用響應(yīng)曲面圖,分析圖知外腔體高度ho在70~85 mm范圍時(shí)隨著ho的增大變異系數(shù)逐漸降低,在85~100 mm范圍內(nèi)時(shí)對(duì)變異系數(shù)的影響規(guī)律相反,但影響程度減弱;導(dǎo)流板圓心角α在80°~90°范圍時(shí)隨著α的增加周向變異系數(shù)逐漸降低,在90°~100°范圍內(nèi)影響規(guī)律相反。當(dāng)外腔體高度ho在80~90 mm,α在85°~95°范圍時(shí)周向變異系數(shù)Cv較小。
4.2.3最優(yōu)參數(shù)組合確定
為確定影響飼料周向分布變異系數(shù)的最優(yōu)組合設(shè)計(jì)參數(shù),利用Design-Expert的中心組合響應(yīng)曲面設(shè)計(jì)功能進(jìn)行參數(shù)優(yōu)化,以表4中各因素范圍為約束條件,以周向分布變異系數(shù)回歸方程(式(19))為目標(biāo)函數(shù),求解其最小值。參數(shù)優(yōu)化結(jié)果如圖13所示,圖中黃色區(qū)域表示優(yōu)化范圍,優(yōu)化后的最優(yōu)參數(shù)組合:外腔體半徑Ro為77.01 mm(取77.00 mm),外腔體高度ho為85.41 mm(取85.40 mm),導(dǎo)流板圓心角α為93.17°(取93.20°),此時(shí)周向分布變異系數(shù)Cv最小,其理論結(jié)果為14.13%。

圖13 中心組合參數(shù)優(yōu)化結(jié)果Fig.13 Parameter optimization result with central composite design
5 試驗(yàn)驗(yàn)證
根據(jù)優(yōu)化分析所得最優(yōu)設(shè)計(jì)參數(shù)組合重新制作加工拋料機(jī)構(gòu)(圖14),并同改進(jìn)前拋料機(jī)構(gòu)在南京農(nóng)業(yè)大學(xué)工學(xué)院農(nóng)機(jī)試驗(yàn)場(chǎng)地進(jìn)行定點(diǎn)拋料性能試驗(yàn),如圖15所示。飼料選擇與仿真條件一致的榮威1038柱形顆粒漁用飼料,含水率為12.3%,按照現(xiàn)有對(duì)離心式撒肥機(jī)械性能試驗(yàn)標(biāo)準(zhǔn)[24,28],將以投飼機(jī)拋料盤(pán)中心為圓心,半徑為22 m的圓收集域等分成12份圓心角為30°的扇形區(qū)域,將360 mm×260 mm×60 mm 的收集盒在以投飼機(jī)拋料盤(pán)中心為圓心,半徑分別為3、6、9、12、15、18、21 m的圓上均勻布置,其中半徑為3 m和6 m的圓上每隔10°布置一個(gè)收集盒,半徑為12、15、18、21 m的圓上每隔5°布置一個(gè)收集盒(圖15)。試驗(yàn)結(jié)束收集每個(gè)區(qū)域內(nèi)所有收集盒飼料總質(zhì)量,計(jì)算得飼料周向分布變異系數(shù)Cv,改進(jìn)前后各進(jìn)行3次重復(fù)試驗(yàn)。得到改進(jìn)前變異系數(shù)分別為:64.28%、66.57%、65.90%,均值為65.58%,平均相對(duì)誤差為5.51%;優(yōu)化改進(jìn)后變異系數(shù)分別為:14.79%、15.32%、15.13%,均值為15.08%,平均相對(duì)誤差為6.72%,試驗(yàn)驗(yàn)證結(jié)果與仿真預(yù)測(cè)結(jié)果基本一致,說(shuō)明了軟件優(yōu)化參數(shù)的準(zhǔn)確性和可行性。同改進(jìn)前相比,周向分布變異系數(shù)降低50.50個(gè)百分點(diǎn),表明優(yōu)化改進(jìn)方案的有效性。

圖14 投飼機(jī)進(jìn)料腔體改進(jìn)前后實(shí)物圖Fig.14 Pictures of feeder before and after improvement

圖15 試驗(yàn)現(xiàn)場(chǎng)圖及收集盒布置示意圖(0°~90°)Fig.15 Diagram of test site and distribution map of collection box (0°~90°)
6 結(jié)論
(1)利用EDEM-Fluent耦合方法對(duì)氣動(dòng)式投飼機(jī)作業(yè)過(guò)程進(jìn)行模擬仿真,分析知進(jìn)料腔和導(dǎo)流板結(jié)構(gòu)參數(shù)是影響拋料性能的關(guān)鍵因素。
(2)在拋料結(jié)構(gòu)優(yōu)化改進(jìn)的基礎(chǔ)上,設(shè)計(jì)三元二次回歸正交旋轉(zhuǎn)組合試驗(yàn)和響應(yīng)面分析,結(jié)果表明各影響因素對(duì)飼料周向分布變異系數(shù)的影響程度從大到小為:導(dǎo)流板弧度角α、外腔體半徑Ro、外腔體高度ho。優(yōu)化分析得,當(dāng)Ro為77.00 mm、ho為85.40 mm、α為93.20°時(shí),周向分布變異系數(shù)Cv最小,其理論結(jié)果為14.13%。
(3)場(chǎng)地試驗(yàn)驗(yàn)證表明,最優(yōu)參數(shù)組合下周向分布變異系數(shù)為15.08%,改進(jìn)前周向分布變異系數(shù)為65.58%,與軟件模擬仿真結(jié)果基本一致,表明回歸模型能夠較好地模擬拋料顆粒周向分布情況,借助EDEM-Fluent耦合法分析優(yōu)化氣動(dòng)式投飼機(jī)拋料性能是可行的。
