感應電機無差拍電流預測控制改進研究
2019-10-09 07:48:48
防爆電機 2019年5期
關鍵詞:控制策略
(佳木斯防爆電機研究所有限公司,黑龍江佳木斯 154005)
0 引言
電流環直接影響伺服系統響應速度,伺服系統動態性能的關鍵在于提高電流環的帶寬,無差拍電流控制增加電流環帶寬同時,由于它是基于精準的數學模型,因此在實際運用中,系統跟蹤性相對較差,因此,本文采用Super Twisting算法對無差拍電流預測控制方法進行改進,建立數學模型,采取Super Twisting算法的擾動觀測器進行系統擾動評估,所得的擾動作為前饋補償,通過理論推導和實驗來驗證電流誤差預測控制的有效性。
1 傳統無差拍電流預測控制策略分析
圖1為感應電機典型控制系統框圖,速度環和弱磁控制器值給予電流環,電流環對電機運行起到關鍵作用,響應能力快速的電流環,不僅使電流收斂速度加快,而且可以使速度環帶寬得到保證,于是提出了PI控制、滯環控制、基于滯環的預測控制、基于軌跡的預測控制等多種電流環控制策略。

圖1 感應電機典型控制系統
圖2為感應電機典型無差拍電流預測控制系統框圖,無差拍預測控制是先建立被控對象的數學模型,在每個采樣周期內計算下一周期的控制信息,在下一更新時刻時,使控制信息偏差為零。與PI控制相比,響應更為快速,而且可為高帶寬速度環提供條件。但由于完全依賴電機模型,因此,當外界溫度、磁場等因素變化時,電機電阻和電感將隨之改變,使得數學模型與實際電機不匹配,出現穩態電流誤差,控制系統不穩定,因此如何提高預測控制的魯棒性是重點。
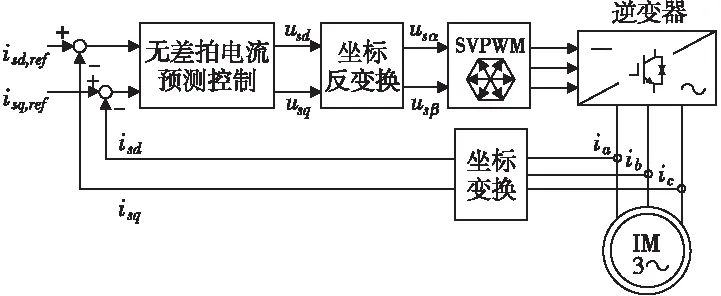
圖2 感應電機典型無差拍電流預測控制系統
目前,無差拍電流預測控制策略改進方面,文獻[1]、[2]提出了魯棒電流預測控制,估算下一刻的定子電流,達到降低對電機模型的依賴,進而增強魯棒性,但是,穩態電流誤差的問題仍然存在。文獻[3]提出了一種自適應魯棒電流預測控制策略,采取自適應補償使穩態電流誤差消除方式,但需要添加校正項,使算法變得復雜,調節難度加大。
2 數學模型
理想感應電機矩陣方程可表示為
(1)

考慮到實際情況,電機溫度變化會引起電阻變動,電感會隨著磁場飽和程度發生變化,因此,與傳統無差拍電流預測控制策略方法不同,需要將電機電阻變化、電機電感變化以及系統未建模動態引起的擾動考慮到方程中。
式(1)可表示為
(2)
f=-B′-1[ΔAi+ΔB(u-d-Δd+ε)]+Δd-ε
(3)
對式(2)進行離散處理,可得感應電機數學表達式
(4)
式中,Ts—采樣周期。
由于電機控制系統中采用全數字控制,電流信號采集與PWM占空比信號計算、A/D轉換、PWM占空比更新存在一定時間的延時,因此,需要考慮延時,式(4)改為
(5)
針對傳統無差拍電流預測控制策略方法存在的電流誤差問題,將Super Twisting算法應用于擾動觀測器,并與無差拍電流預測控制策略結合,構成一種新的復合控制策略。
3 推導與驗證
3.1 理論推導
Super Twisting算法的擾動觀測器方程為
(6)
將式(6)離散化處理得
(7)
令x=i′;v=-B′f,代入式(5)可得
d(k-1)]-Tsv(k-1)]
(8)
選取滑膜面,可將擾動觀測器方程離散化,方程如下
(9)
可求得方程的充分必要條件為

(10)
因此,可以保證觀測器的穩定性。如下圖3為復合控制策略圖。
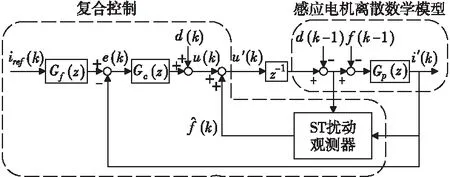
圖3 復合控制策略圖
從圖中可以看出,指令電壓

可計算復合控制策略的穩態誤差為
(11)
3.2 實驗驗證
采用復合控制策略和傳統無差拍電流預測控制策略對比試驗結果,電感是電流環的主要擾動,因此選取電機電感作為測試參數。測試在空載和負載條件下,電感變化范圍為50%~200%,電機轉數為1500n/min,實驗結果如圖4和圖5所示。
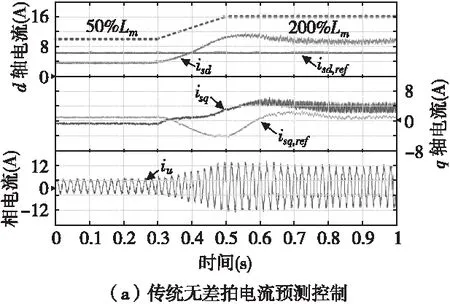
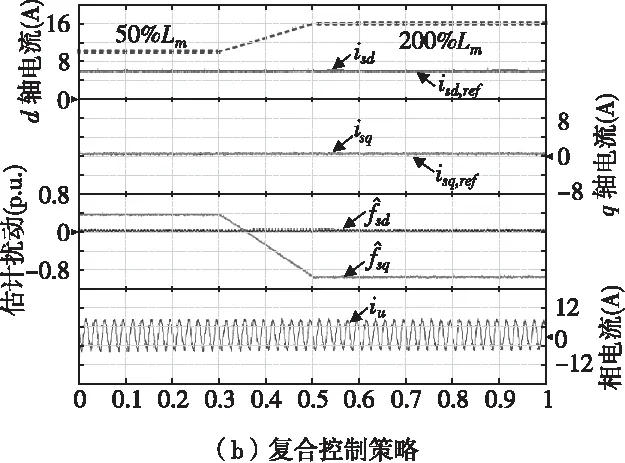
圖4 空載運行
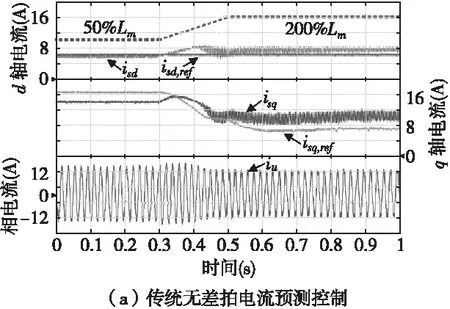
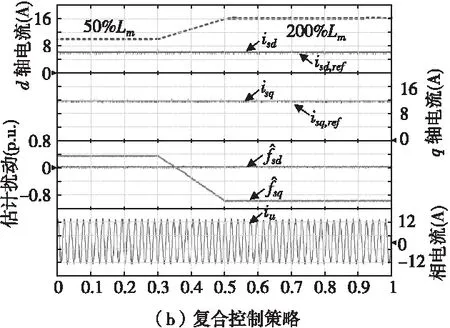
圖5 負載運行
從圖4和圖5,可以看出傳統無差拍電流預測控制電感在200%時,出現電流震蕩,isd,isq與isd,ref,isq,ref存在電流誤差,而通過復合控制策略isd,isq能很好跟蹤給定值,穩態電流誤差得到消除。
4 結語
本文分析了傳統無差拍電流預測控制存在的穩態電流誤差問題,提出了一種基于SuperTwisting算法的復合控制策略。通過理論推導和實驗驗證,結果表明在電機參數不匹配時,這種復合控制策略能很好解決穩態電流誤差問題。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36