火控雷達(dá)跟蹤目標(biāo)系統(tǒng)響應(yīng)時(shí)間的研究
2019-10-09 05:48:38張西平梁江鵬楊茜陳國(guó)際
電子技術(shù)與軟件工程 2019年17期
文/張西平 梁江鵬 楊茜 陳國(guó)際
1 引言
隨著防空領(lǐng)域武器系統(tǒng)發(fā)展,防空目標(biāo)由原先傳統(tǒng)的戰(zhàn)斗機(jī)、巡航導(dǎo)彈類目標(biāo),轉(zhuǎn)變?yōu)镽CS更小的低速無(wú)人機(jī)等低空目標(biāo),面對(duì)作戰(zhàn)目標(biāo)的變化,對(duì)于火控系統(tǒng)的響應(yīng)時(shí)間以及響應(yīng)速度提出更高的要求,其中在武器系統(tǒng)中承擔(dān)重要角色的探測(cè)器響應(yīng)時(shí)間縮短對(duì)于系統(tǒng)系統(tǒng)響應(yīng)時(shí)間的貢獻(xiàn)顯得尤為重要,火控雷達(dá)中,系統(tǒng)響應(yīng)時(shí)間主要由伺服調(diào)轉(zhuǎn)時(shí)間和信息處理時(shí)序所占用的時(shí)間組成,信息處理占用的時(shí)間由系統(tǒng)時(shí)序規(guī)劃決定,當(dāng)雷達(dá)的時(shí)序關(guān)系確定好之后,處理信息的時(shí)間長(zhǎng)短已經(jīng)確定,變化的部分為伺服調(diào)轉(zhuǎn)時(shí)間,該部分時(shí)間主要由伺服調(diào)轉(zhuǎn)策略以及伺服驅(qū)動(dòng)電機(jī)加速度、速度確定,在伺服驅(qū)動(dòng)電機(jī)選定的情況下,伺服調(diào)轉(zhuǎn)策略的選擇確定了調(diào)轉(zhuǎn)時(shí)間。
圖1
圖2

圖3
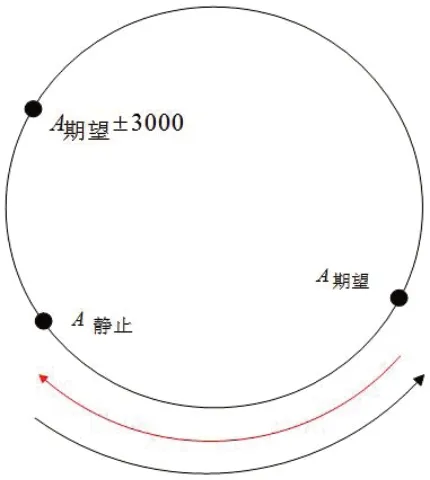
圖4
圖5
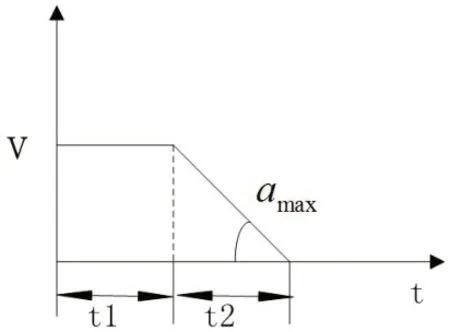
圖6
2 模型建立
2.1 模型1
2.2 模型2
雷達(dá)天線由運(yùn)動(dòng)以最大加速度減速到達(dá)靜止?fàn)顟B(tài),如果停止位置滿足則雷達(dá)天線運(yùn)動(dòng)保持與天線在搜索狀態(tài)運(yùn)動(dòng)方向一致,以恒定加速度減速停止在期望位置,如圖3所示,如果停止位置滿足則雷達(dá)天線最大加速度減速至靜止,然后以與天線搜索狀態(tài)相反的方向方向加速再減速最終靜止在期望位置,如圖4所示。
3 系統(tǒng)響應(yīng)時(shí)間推導(dǎo)
對(duì)于搜跟一體雷達(dá),雷達(dá)方位上為機(jī)械跟蹤的情況下,搜索轉(zhuǎn)跟蹤過(guò)程中,天線伺服調(diào)轉(zhuǎn)的方式會(huì)有多種方式,在此考慮兩種伺服調(diào)轉(zhuǎn)控制策略,對(duì)比兩種方法在不同角加速度、不同調(diào)轉(zhuǎn)角度下的響應(yīng)時(shí)間,選擇調(diào)轉(zhuǎn)時(shí)間更短的作為雷達(dá)天線搜索轉(zhuǎn)跟蹤的伺服控制策略,天線伺服調(diào)轉(zhuǎn)用時(shí)更短的,對(duì)于系統(tǒng)響應(yīng)貢獻(xiàn)更大。
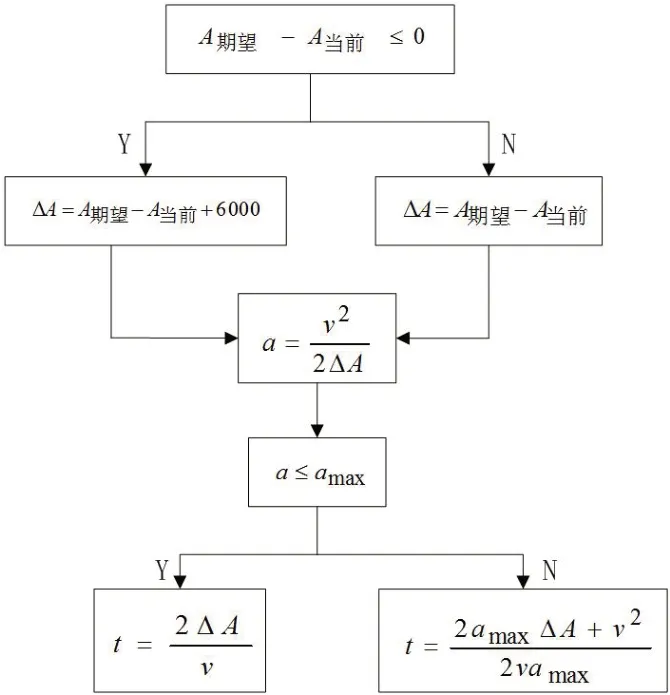
圖7
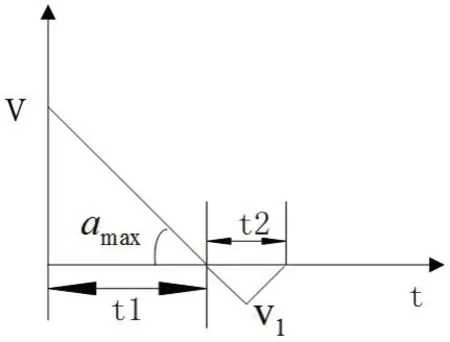
圖8
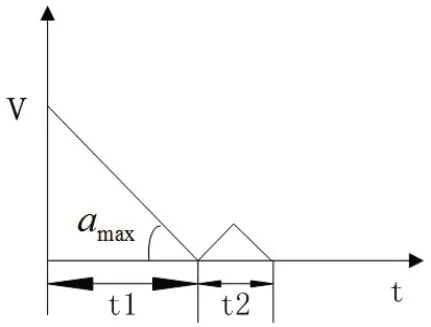
圖9
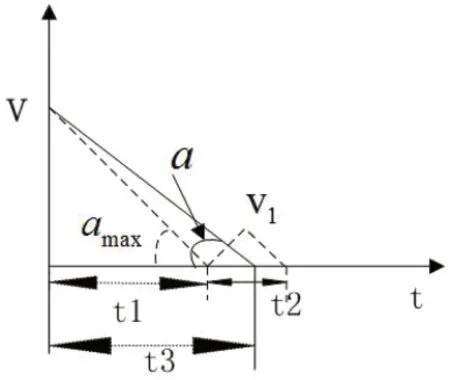
圖10
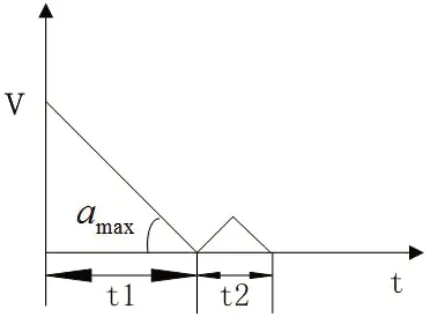
圖11
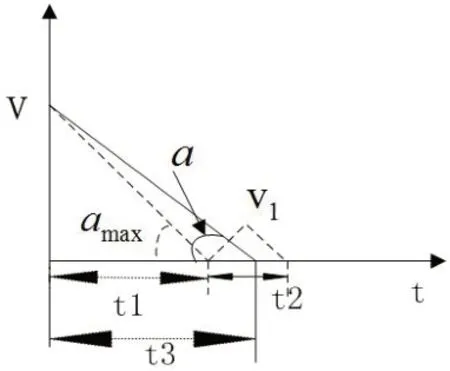
圖12
3.1 采用伺服控制策略1
3.1.1 直接減速
3.1.2 勻速再減速

圖13
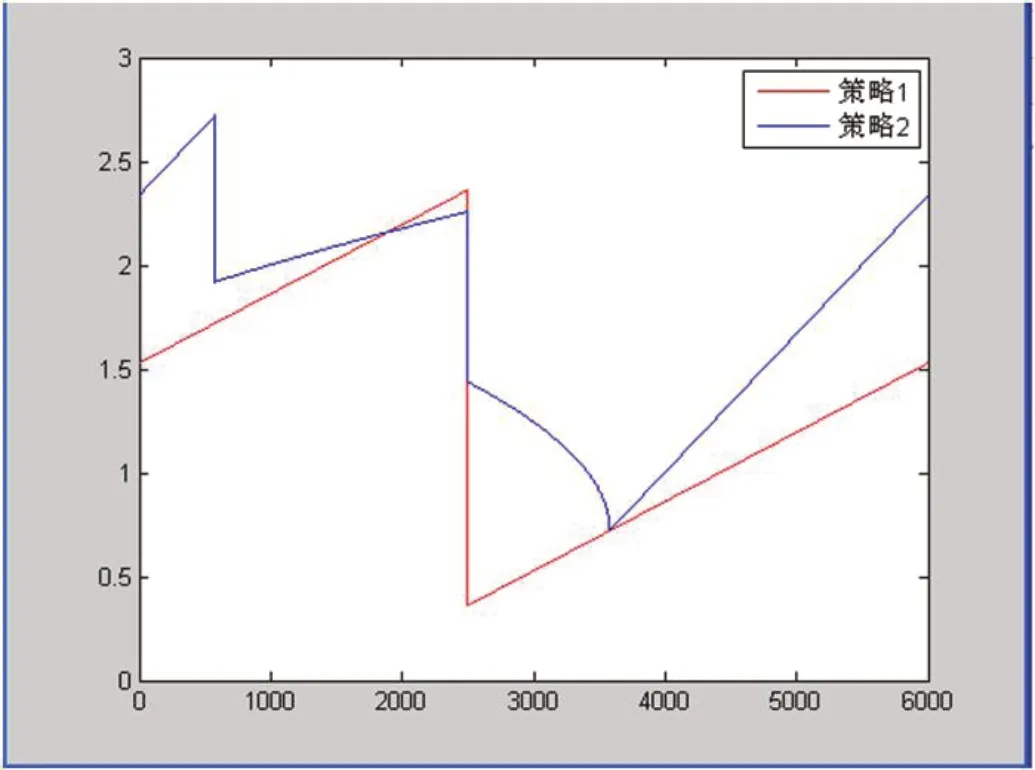
圖14
由圖6可計(jì)算天線調(diào)轉(zhuǎn)時(shí)間如下:
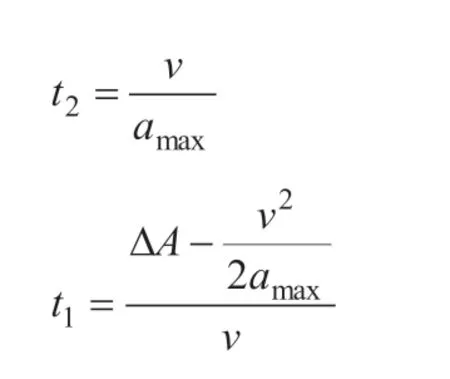
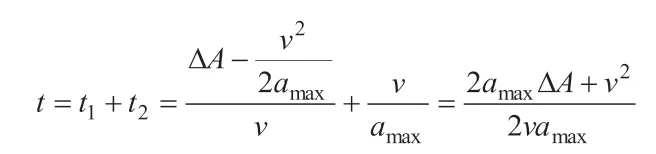
3.1.3 采用調(diào)轉(zhuǎn)策略1時(shí)間推導(dǎo)流程
如圖7所示。
3.2 采用伺服控制策略2
天線由搜索狀態(tài)最快轉(zhuǎn)為靜止?fàn)顟B(tài),即以最大加速度減速,可將在用時(shí)最短的情況下轉(zhuǎn)為靜止,在整個(gè)過(guò)程中天線轉(zhuǎn)動(dòng)的角度為 ,可推導(dǎo)其值大小如式:
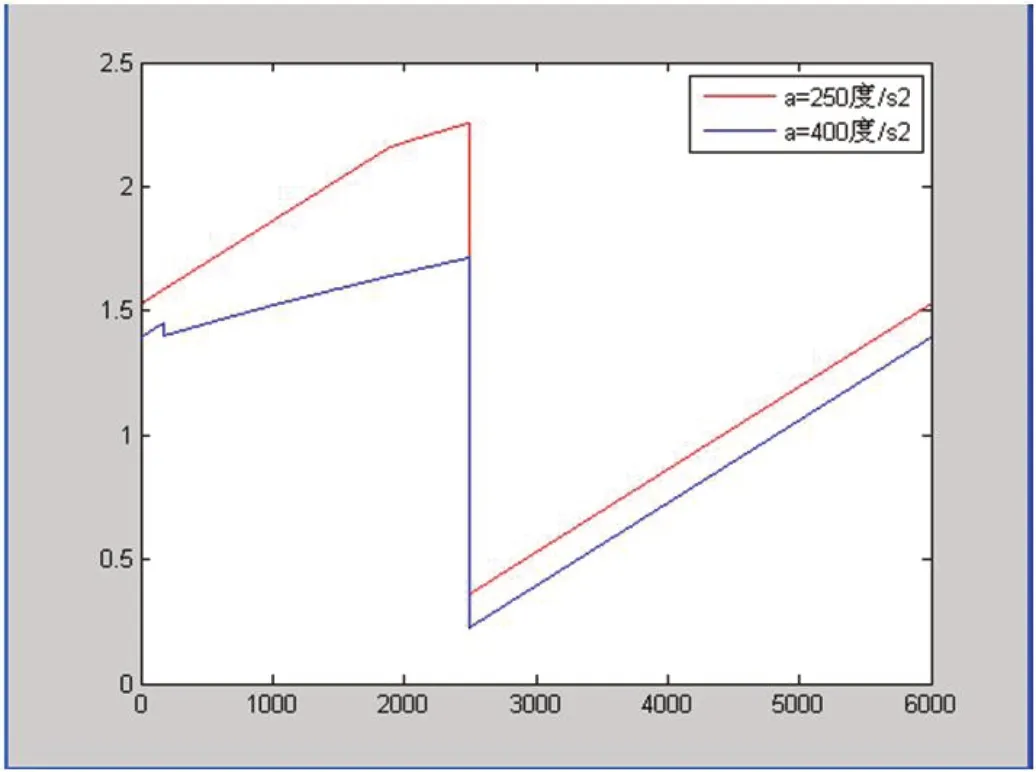
圖15
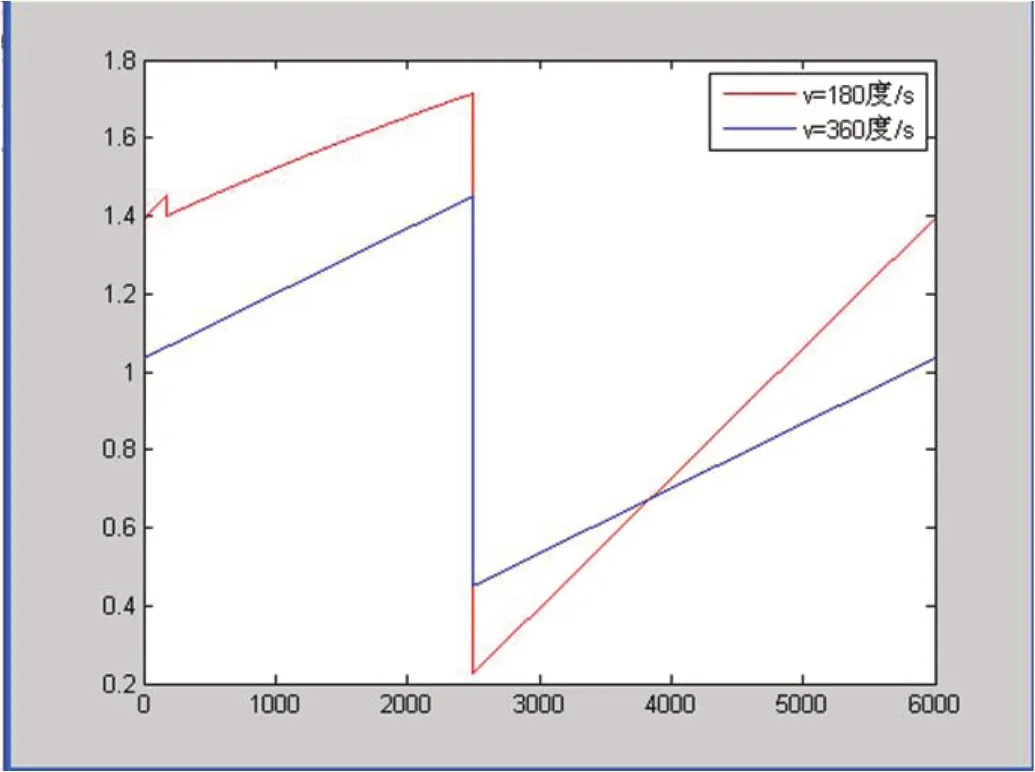
圖16

雷達(dá)天線轉(zhuǎn)為靜止?fàn)顟B(tài)時(shí)方位角為
3.2.1 先順時(shí)針再逆時(shí)針調(diào)轉(zhuǎn)1
3.2.2 順時(shí)針直接減速1

3.2.3 順時(shí)針直接減速2


3.2.4 先順時(shí)針再逆時(shí)針調(diào)轉(zhuǎn)2

3.2.5 采用調(diào)轉(zhuǎn)策略2時(shí)間推導(dǎo)流程
雷達(dá)調(diào)轉(zhuǎn)天線響應(yīng)時(shí)間處理流程如圖13所示。
4 仿真分析
系統(tǒng)設(shè)計(jì)過(guò)程中,伺服調(diào)轉(zhuǎn)最大加速度指標(biāo)給定,雷達(dá)天線在任意角度調(diào)轉(zhuǎn)過(guò)程中,其調(diào)轉(zhuǎn)時(shí)間可分別采用上述兩種策略進(jìn)行仿真計(jì)算,對(duì)比其方法策略的優(yōu)劣性。
4.1 給定固角度、加速度、速度情況下采用兩種調(diào)轉(zhuǎn)策略時(shí)間對(duì)比
假定最大加速度為400°/s2,當(dāng)前天線轉(zhuǎn)速為180°/s,雷達(dá)當(dāng)前位置為2500mil,仿真計(jì)算得到雷達(dá)天線調(diào)轉(zhuǎn)到任意位置的時(shí)間關(guān)系如圖14所示。
其中紅色為采用策略1調(diào)轉(zhuǎn)時(shí)間,藍(lán)色為策略2調(diào)轉(zhuǎn)時(shí)間,從上圖可分析當(dāng)期望位置在170mil,即期望位置小于2330mil范圍內(nèi),采用調(diào)轉(zhuǎn)策略2所需時(shí)間小于采用策略1調(diào)轉(zhuǎn)天線所用的時(shí)間,其它情況下,采用策略1調(diào)轉(zhuǎn)雷達(dá)天線所需時(shí)間更短,即在小于期望角度一定范圍角度內(nèi),采用策略2可以減小雷達(dá)天線伺服調(diào)轉(zhuǎn)的最大時(shí)間。
當(dāng)雷達(dá)當(dāng)前位置變化時(shí),即該圖發(fā)生左右平移,采用兩種調(diào)轉(zhuǎn)天線策略時(shí)間相對(duì)關(guān)系保持不變,即在火控系統(tǒng)中要求雷達(dá)天線調(diào)轉(zhuǎn)時(shí)間最短的情況下采用兩種策略的結(jié)合,取調(diào)轉(zhuǎn)角度時(shí)間較短的方法策略。
4.2 不同加速度情況下雷達(dá)天線調(diào)轉(zhuǎn)時(shí)間對(duì)比
采用兩種策略結(jié)合的方法,仿真分析加速度分別為250°/s2和400°/s2情況下天線調(diào)轉(zhuǎn)時(shí)間,從圖15可看出,隨著加速度的提高,天線調(diào)轉(zhuǎn)最大時(shí)間降低,加速度為400°/s2時(shí)最大時(shí)間小于加速度為250°/s2約0.7s,因此在系統(tǒng)設(shè)計(jì)指標(biāo)時(shí)為降低系統(tǒng)響應(yīng)時(shí)間,可適度提高伺服加速度值。
4.3 不同轉(zhuǎn)速下雷達(dá)天線調(diào)轉(zhuǎn)時(shí)間對(duì)比
采用兩種策略結(jié)合的方法,仿真分析速度分別為180°/s和360°/s情況下天線調(diào)轉(zhuǎn)時(shí)間,從圖16可看出,隨著天線轉(zhuǎn)速提高,天線調(diào)轉(zhuǎn)最大時(shí)間降低,速度為360°/s時(shí)最大時(shí)間與速度為180°/s時(shí)最大調(diào)轉(zhuǎn)時(shí)間相比,降低了約 0.3s,因此在系統(tǒng)設(shè)計(jì)時(shí)也可通過(guò)提高天線轉(zhuǎn)速降低系統(tǒng)伺服響應(yīng)時(shí)間。
5 結(jié)束語(yǔ)
本文通過(guò)建立模型分析得出可通過(guò)選取合適的天線調(diào)轉(zhuǎn)控制策略,可優(yōu)選出調(diào)轉(zhuǎn)到任意角度用時(shí)最短的伺服控制策略,同時(shí)選擇最大加速度較大伺服系統(tǒng)、提高天線搜索狀態(tài)下速度均可較小天線調(diào)轉(zhuǎn)最大時(shí)間。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
