救援機器人的多傳感器測控系統
2019-10-09 05:48:28趙麗
電子技術與軟件工程 2019年17期
文/趙麗
國家和社會在快速發展,科學技術在不斷進步,對于各種災難的救援工作也進行了改進,開始使用救援機器人進入一些危險復雜災難現場實施救援,進而解決了傳統救援搜救時間緊張、災害現場幸存和救援人員生命安全不能保障等問題。救援機器人是可以自主移動的智能機器人,能代替人員對危險復雜的災難現場進行勘察、檢測、處理突發事件等活動,提高了救援效率,減少了人員傷亡。在救援時會把現場實際信息反饋給救援中心,使其以最快速度了解災難現場具體情況,進行合理判斷,并更好的實施救援安排,救援時間減少了,也降低了人員傷亡,并降低了經濟損失。
1 救援機器人傳感檢測平臺
救援機器人進行工作時,要進入相應救援現場,環境具有不確定和復雜性,因此要設計和搭建穩定的硬件平臺是其工作的重點。而機器人硬件平臺重要部分濟源市傳感器平臺的設計。傳感器系統是機器人的感覺器官,幾乎所有機器人當中都有傳感器,讓機器人把自身所需信息輸入系統,由傳感器控制其感知系統。機器人進行環境和自身情況感知,都是由傳感器就那些探測方式實現的。救援工作環境復雜、具有局限性,機器人本身有不確定狀態等,需要使用多各種傳感器對各種信息情況測控,比如測溫度、測距離、探測生命氣息、氣體感知等。應用多傳感器可以在同一時間提供環境中的補充、冗余等各種信息,方便救援中心人員的判斷和指揮。
1.1 測距傳感器
距離的移動是機器人各種活動的基礎,對導航、避障、定位、路徑規劃等都有重要作用,能確保機器人有效完成任務。通常情況下,救援機器人進行測量距離是應用超聲波、紅外、激光等傳感器,其中的超聲波音信息處理簡單、價格低,并且具有實時性,進而被廣泛應用。因為其結構簡單,所以不容易被外界環境影響,比如電磁、煙霧、光線等。救援機器人如果裝載單一的傳感器,會產生缺陷,多種傳感器實施準確配合,能克服單一傳感器的缺陷。比如利用紅外和超聲波傳感器設計一個測距系統,以多個傳感器補充單一傳感器測距盲區。這種機器人利用了十六個超聲波傳感器,可以探測30-300cm范圍障礙物,并應用了八個紅外傳感器,能感知30cm范圍障礙物。應用超聲和紅外傳感器作救援機器人的傳感器,多個兩類傳感器有效配合,相互補充。
1.2 其他傳感器
在進行災難救援時,要有上述兩種重要的傳感器,還要有其他各種類型的傳感器,這些傳感器相互配合進行救援現場信息采集及處理,比如探測現場溫濕度、檢測空氣質量等傳感器。溫濕度對受災現場有很大影響,如果溫濕度適合,會滋生各種細菌,進而對人體、牲畜等都有影響。災難現場的溫濕度通常都不適合人體生存,會對人體造成傷害。因此,溫度傳感器對救援有非常重要的作用。比如,利用高溫數字溫濕度傳感器,溫度、濕度兩種傳感器相聯合,實現溫濕度的測控工作。另外,災害現場環境空氣中的氣體含量檢測對救援也有重要作用,空氣中的有毒有害氣體的含量會對人員生還產生影響,也會給施救工作帶來困難。如果災害現場有易燃氣體,濃度相當會發生爆炸危險。所以,要科學合理的設計空氣質量檢測傳感器,對空氣中各種氣體含量進行準確檢測,以方便救援工作的開展。比如,可以應用MQ-2型氣體傳感器進行測控,這是二氧化錫作傳感器的氣敏材料。空氣清潔,二氧化錫導電率很低,在空氣中有可燃、有毒氣體時,其導電率就會根據這些氣體濃度不同而發生變化,傳感器當中連接電路,進而可以接受相應的氣體濃度信息信號,這是對這些氣體比較敏感的傳感器,成本低,很適用于救援機器人使用。
2 傳感器模塊軟件
傳感器系統的有效正常運行需要有相應的軟件支持,進而實現相應工作。傳感器檢測模塊中傳感器不同,會有不同的控制及信號輸出,超聲測距及溫濕度傳感器是應用軟件程序進行控制,輸出具體信息信號;而其他傳感器輸出的是電平變化報警信號。接著分析超聲測距及溫濕度傳感器應用程序設計。
2.1 超聲波測距程序
這種測距程序是應用超聲波傳感器進行距離的測試,經常應用的是渡越時間法。其原理是電效應,實施電能和超聲波的相互轉化,就是超聲波發射,電能轉換成聲波進,接收回波時,相應的超聲震動轉化為電信號。這個過程有接收器和發送器,并可以做到同時發送、接收聲波。這就是渡越時間法,是超聲測距廣泛應用的方法。這是把超聲波傳播時間和速度進行相乘,得到超聲波往返距離,是傳感器到障礙物兩倍的距離。根據這個測距原理,進行相應的測距流程設計。通常都是應用C語言實施程序設計,超聲波測距流程圖如圖1。
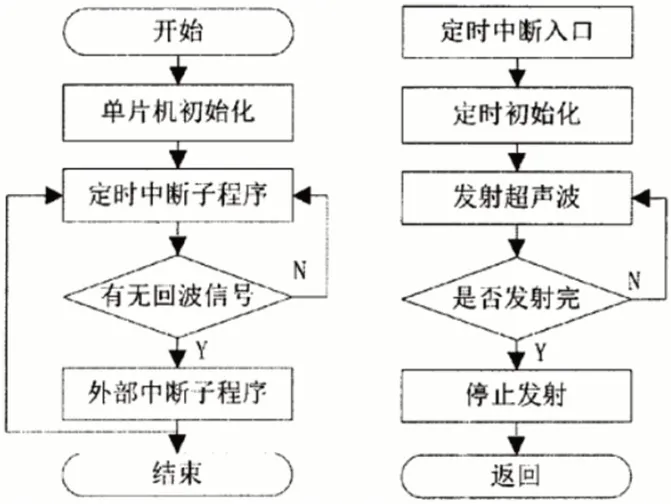
圖1:超聲波測距流程圖
2.2 溫濕度傳感器程序
溫濕度傳感器要求性價比高、耗能低、抗干擾強、響應快,并可以在直接是傳感器直接和引線相連,不需要其他部件,傳感器損壞時,方便更換。結合溫濕度傳感器測量原理,進行設計溫濕度傳感器程序。如圖2。

圖2:溫濕度傳感器測量流程圖
3 多傳感器信息融合
進行多傳感器信息的融合是把多個傳感器進收集的信息數據利用相應處理,進而得到精度高的信息。救援機器人利用多傳感器信息融合技術,能更好的提高信息數據處理能力,進而進行準確決策,可以使災害現場控制中心人員及時準確得到現場情況,使救援效率大大提高。
3.1 信息融合
傳感器具體的應用過程中,會遇到各種不同環境,信息融合法結合不同處理形式分為不同結構模型,分別是集中方式、分布方式、混合方式等。三種模型結構不同,也有不同的特點,分布方式具有更好的優勢,具有很低的造價,具有很好的擴充性,并且對通信帶寬要求不高,融合處理比較容易。所以,經常應用的是分布方式的結構模型。
3.2 信息融合方式分類
多傳感器控制系統進行相互融合的傳感器有很多種,根據相互融合的方法分為傳統和智能兩類。首先,傳統類。這種方法有加權平均法、卡爾曼濾波法、貝葉斯估計法、D-S證據推理法、產生式規則等不同方法,這些方法都可以進行多個傳感器信息融合,可是不具有智能性。其次,智能類。相應的智能類是隨著科學信息技術的發展開發和應用的方法。有模糊邏輯推理方法和人工神經網絡法。其中的模糊邏輯推理法是是對數據信息使用0到1間的一個小數進行表示,在應用多個傳感器實施相應測量時,能對不同類型傳感器不融合進行防止和避免。這是決策級別的融合法。而人工神經網絡法當中的神經網絡結構具有多傳感器系統類似的結構,輸入輸出路徑有多個,因此,人工神經網絡更容易進行信息融合法有更大優勢。它是應用權值分布合理表述傳感器數據分類標準,其標準是根據系統接受樣本相似性進行確定的。
4 結束語
綜上所述,救援機器人的多傳感器測控系統是災害救援的重要設備和機器,對進行災難的復雜環境中人員物質等有效救助救援有積極作用。文章對救援機器人的多個傳感器測控平臺、控制支持模塊軟件、多種信息融合等方面進行了介紹和分析,明確救援機器人的多傳感器的測控作用和優勢,了解其順利實施災難救助救援的方法。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
