遠光燈主動預防控制系統研究
2019-10-08 05:07:46張瑞
無線互聯科技 2019年14期
張瑞

摘? ?要:文章從遠光燈濫用現象的根源著手,設計開發了一種基于紅外測距激光陣的遠光燈控制系統。仿真模擬的結果表明該系統優良,能準確地做出判斷,并能及時給予提醒和自動切換遠光燈為近光燈,達到實現遠光燈的主動預防控制的目的。
關鍵詞:遠光燈;主動預防;系統控制;仿真模擬
1? ? 研究背景
1.1? 遠光燈濫用現象
遠光燈是汽車照明設施,其光線平行射出、集中且亮度較大。為了給自己帶來更好的視線以及更安全的心理感受,司機在夜間行車時會長時間開啟遠光燈。但若在不適合的情況下隨意開啟遠光燈,將會導致對向的駕駛人或行人瞬間致盲,使他們對周圍環境的觀察能力下降,無法看清路況。
我國道路交通安全法規定,機動車夜間會車須距對面來車150 m外互閉遠光燈,改用近光燈。但濫用遠光燈在“中國式駕駛陋習”中排第一位。據交通部門的統計,每年夜間行車事故當中,約30%的事故與濫用遠光燈有關,且呈上升趨勢。
1.2? 遠光燈主動控制研究現狀
鑒于遠光燈濫用的問題亟待解決,國內外眾多學者針對遠光燈問題展開了研究[1],目前,國內多利用光傳感器進行前方車輛探測。本車(A車)后視鏡上安裝光傳感器,可探測來自對方來車(B車)的光照強度,進而判斷B車是否會在一定距離內與本車發生會車行為。若是,則A車將開啟語音提醒并自動切換遠光燈為近光燈[2]。但光敏電阻易受到外界光源的干擾,若對面的車輛因故沒有開車燈或者車燈亮度較低,則在安全距離以外及時、準確地發現對方車輛較為困難,無法準確地實現遠近燈的自動轉換,實際使用效果不理想。
另有在車頂安裝激光發射器與接收器的方法。對方來車(B車)探測由本車(A車)發射的激光信號并將其反饋至控制電路,由控制電路完成遠、近光燈的轉化[3]。由于該技術需要雙方車輛均具備信號發射與接收器,若車輛未安裝該設備,將無法被其他車輛探測,形成探測漏洞,且該系統無法針對車輛所在車道確定合適的激光發射范圍,易造成光源浪費或探測范圍不足。
國外一些汽車公司也進行了遠光燈的自動輔助控制系統試驗。現有紅外夜視系統,利用目標與周圍環境之間由于溫度或發射率的差異所產生的熱對比度進行成像,能夠看清前方150~300 m內可輻射熱能物體。但紅外夜視系統只能作為遠光輔助,不能完全解決遠光危害問題,且其價格昂貴,不具有推廣性。此外,美國GENTEX公司開發了智能變光汽車前照燈,利用傳感裝置感測前方光源,當迎面來車時會自動降低前照燈的光照度,當會車完成又恢復強光[4]。但如遇前方車流突增、車輛在轉彎行駛時光照度亦會立刻減弱,且該產品價格昂貴。
1.3? 作品研究目的
汽車遠光燈的設計本意是為了幫助駕駛員在夜間更好地觀察道路情況,提高夜間行車安全度,但一旦被不正確使用,將會成為交通事故的肇事“兇手”。
本文致力于開發一項簡單、有效、成本低廉、易于推廣的遠光燈控制技術,實現在一定范圍內遠、近光燈的自主切換,從根源上解決遠光燈濫用問題。另外,由于在路面出現彎道時,部分燈光將散射至路側,在直射人眼的過程中損失部分能量,危害程度較直道行駛較小,故本文重點解決直道上的遠光燈濫用問題。
2? ? 設計思路
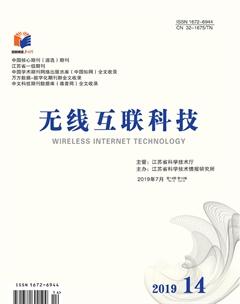
本文研究的遠光燈主動預防控制系統,主體為安裝于車前、車后的紅外傳感設備,通過分別布置路沿光陣與目標光陣對一定距離內車輛進行探測,來自主控制遠光燈的使用。系統具體流程如圖1所示。
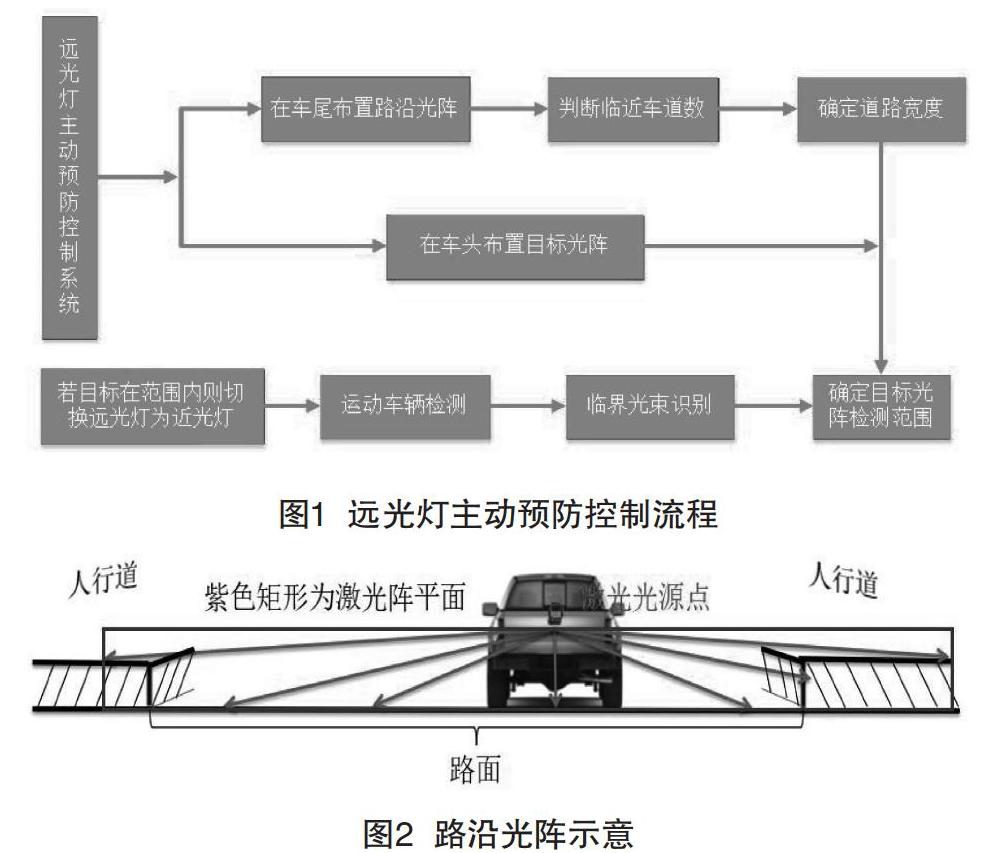
由于人行道與車道之間存在高度差,路沿光陣中的光線發射至人行道與發射至車道將產生不同的效果。基于該特點,根據車道寬度設置路沿光陣的光線偏轉角,根據紅外設備測出的光線,利用幾何關系推算鄰近車道數,經計算得出車輛兩側的道路寬度,進而確定車頭目標光陣的探測范圍。如圖2所示,光源源點向左和向右發出激光束,形成路沿光陣,且激光陣平面為豎直平面。
將位于目標光陣中的車輛模糊化為具有車輛輪廓且隨測量周期持續運動的點,隨著光陣中車輛的運動,光陣將有部分光線被遮擋,且具有一定的規律。為判斷目標是否為車輛,定義在目標光線簇中激光測量距離最小且沒有打在目標物側面的光線為邊緣光線。利用目標光陣中的邊緣光線對目標物的輪廓進行刻畫,最終判斷目標物是否為車輛。若為車輛,系統將作出切換遠光燈為近光燈的判斷。
圖3中,當對向車B1或同向車B2駛入試驗車A車頭中間光源O發出的紅外光陣中時,在R為150~250 m范圍內,系統將判斷B1或B2是否為車輛。若為車輛,則試驗車A會提醒駕駛員切換為近光燈或自主切換為近光燈。
3? ? 算法設計
本系統主要有兩個板塊的算法。
(1)基于紅外測距激光陣研發夜間行車場景下的道路寬度測定及前方車輛檢測方法。利用在車頭和車尾設置的激光測距裝置,基于激光陣對目標物的距離測定實現直線道路寬度測定;通過分析目標物與激光陣的相對位置變化,建立目標物輪廓識別方法,據此實現前方車輛檢測。
(2)基于車輛運動狀態及相對距離測定進行夜間會車安全性評估,并實現遠光燈主動預防控制。在相對距離150~250 m范圍內,通過判定試驗車與前方目標的相對位置關系識別目標是否為運動車輛,若滿足會車條件,則啟動遠光燈主動預防控制系統,從根源上避免短距離會車時遠光燈濫用。
4? ? 仿真模擬
基于上述算法在C語言中建立仿真環境,輸入試驗車和目標車的速度,設兩車都是勻速運動且起始時相距1 000 m,利用試驗車與目標的相對位置求出相對速度,從而判斷目標是否運動。通過臨界光速和目標光束簇的變化規律判斷是否具有車輛輪廓。若目標既是運動物體又具有車輛輪廓,則對試驗車作出提醒并自動切換遠光燈為近光燈。隨機產生速度,進行試驗,部分試驗數據如表1所示。從表1中可以看出,在150~250 m的范圍內,本算法總能作出判斷,且準確率為100%。
5? ? 結語
隨著汽車保有量的不斷增加,遠光燈濫用的現象越來越突出,一種價格便宜、簡單、實用且能從根源上解決遠光燈濫用的主動預防控制系統正是社會所需要的。從仿真模擬結果來看,本系統的準確率高、成本低、使用簡單,最重要的是社會經濟效益顯著,因此,具有廣闊的應用前景和重大的現實意義。
[參考文獻]
[1]胡鵬,秦會斌.基于紅外測距汽車倒車雷達預警系統設計[J].傳感器與微系統,2018(7):114-116,126.
[2]羅曉,趙星宇,吳健珍,等.基于CAN總線的智能車燈控制系統[J].上海工程技術大學學報,2015(2):97-100.
[3]常榮俊.一種汽車遠近燈光智能切換系統的設計[J].湖北汽車工業學院學報,2010(2):77-78.
[4]劉振洲.汽車遠光傳感與控制系統研究[D].哈爾濱:黑龍江大學,2009.