用于機電系統控制基礎課程的多參數可調實驗
2019-09-28 02:24:02董惠娟李灝宇石勝君
實驗技術與管理 2019年9期
董惠娟,李灝宇,石勝君
用于機電系統控制基礎課程的多參數可調實驗
董惠娟,李灝宇,石勝君
(哈爾濱工業大學 機電工程學院,黑龍江 哈爾濱 150001)
研制了課程用硬件可配置、軟件可編程、參數可調節、內容可擴展的實驗裝置,通過改變伺服系統的驅動功率、驅動力矩、轉動慣量、摩擦阻力矩、傳動軸剛度、減速比、采樣頻率、控制參數等,使學生更直觀地理解機電參數、控制參數與系統數學模型的映射關系。設計了4個典型的控制實驗,實驗內容不僅覆蓋課程所有章節,而且涵蓋機械設計、自動控制元件、電子技術、驅動控制、傳感器、計算機編程等多門主干課程的關鍵知識。通過實驗教學,不僅有助于加深學生對理論知識的認識和理解,也有利于提高學生的工程綜合實踐能力。
電機系統控制;實驗裝置;實驗教學;系統數學模型
機電系統控制基礎是理論與工程實踐相結合的一門課程,是高等學校機械工程類專業的專業基礎課程,是本科生及研究生后續課程的基礎[1]。實驗教學應以學以致用為目標,突出實踐環節,以硬、軟件訓練相結合的方式,針對機電控制系統中的典型環節開展實踐教學,培養學生獲取知識、運用知識、解決問題的能力[2]。
為提升學生對相關課程關鍵知識的理解,本文開發研制了機電參數可調、硬件可配置、控制方法可編程、內容可擴展的自制實驗設備,設計了參數不同、運動形式不同的教學配套實驗,使學生掌握機電系統數學模型的建立方法、控制性能指標分析方法、控制器設計與離散化方法。
1 實驗裝置的研制
一般的機電控制系統由電動機及其驅動、傳動機構、執行機構、檢測裝置、控制器、輔助機構等組成[3]。本文自主研制了兩種運動形式的模塊化位置伺服系統實驗裝置,可分別做回轉運動和往復直線運動的實驗,如圖1所示。
伺服系統機械裝置由多模塊組成,拆裝方便,通過替換電機、負載配重塊、聯軸器等零部件及調節磁滯制動器參數,改變系統的驅動力矩、減速比、轉動慣量、傳動軸剛度和摩擦力矩等,實現多參數可調,研究不同機械參數對系統控制效果的影響。圖2為用于實驗的硬件可配置的零件照片。
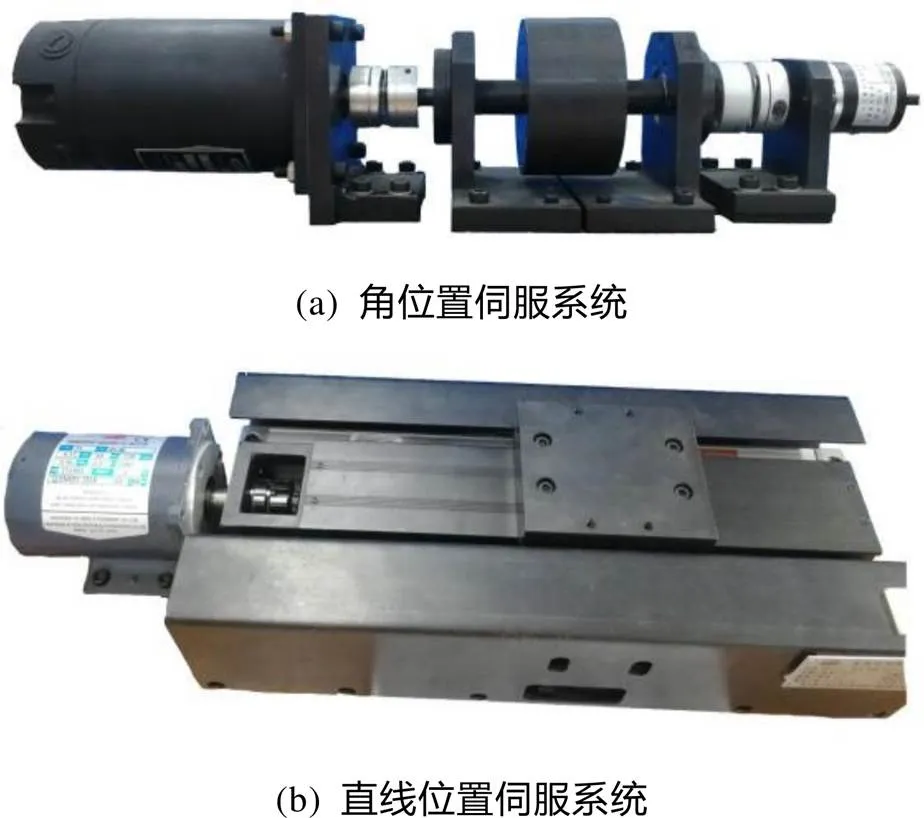
圖1 伺服系統實驗臺機械部分

圖2 用于實驗的硬件可配置的零件照片
本實驗裝置除可配置不同硬件外,還可以調節電機驅動器參數、編碼器計數器倍頻模式、控制算法等,實現自制設備控制參數可調,使學生掌握傳感器精度、控制算法對系統控制性能的影響,并有利于評定學生成績,避免抄襲現象,也有利于培養學生獨立完成實驗的能力。
兩種位置伺服控制系統結構如圖3所示。計算機通過數據采集卡PCI8620數模轉換,ADVANCED電機驅動器輸出電機的電樞電壓[4],位置運動模組進行回轉或往復直線運動。在角位置系統中,由增量式編碼器測量位置,由USB7266計數與判向,由計算機進行處理。在直線位置系統中,光柵和磁柵測量滑塊的位置,由ENC7480計數與判向。

圖3 兩種位置伺服控制系統的結構框圖
2 可擴展的實驗教學內容
為了配合機電系統控制基礎課程的理論教學,設計了如下4個實驗:(1)系統時域響應實驗;(2)基于掃頻法的機電系統傳遞函數辨識及開環性能測試實驗;(3)位置PID控制實驗;(4)串聯校正后的傳遞函數辨識實驗。
2.1 實驗1——系統時域響應實驗

在本實驗中,學生使用Visual Studio軟件的C#語言開發環境,給伺服電機加載速度階躍輸入,測試電機轉速階躍響應曲線,并標定電機轉速和電樞電壓關系,給出正反轉死區電壓和線性系數[5]。本實驗的程序流程見圖4,實驗結果見圖5。根據階躍響應可辨識系統傳遞函數。轉速與電壓的關系為:

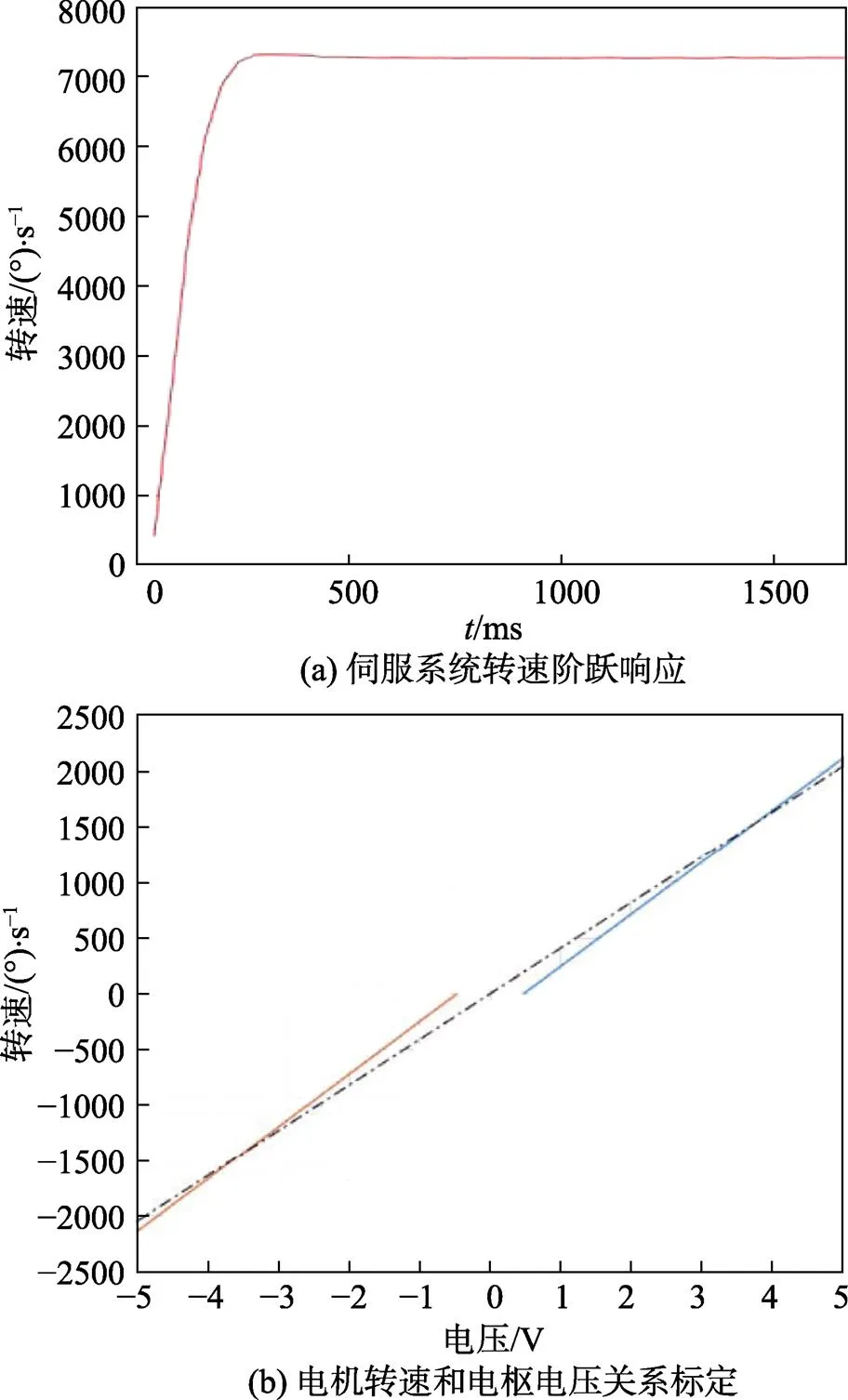
圖5 實驗1實驗結果
2.2 實驗2——基于掃頻法的機電系統傳遞函數辨識及開環性能測試實驗
本實驗對應理論教學中的頻率特性分析內容。在本實驗中,學生使用掃頻法,獲得系統不同頻率速度余弦輸入、位置正弦輸出,繪制幅頻特性曲線和相頻特性曲線,掌握電機速度輸入信號的離散方法、輸出位置信號的實驗數據采集與歸一化方法,并熟悉由Bode圖(幅頻特性曲線和相頻特性曲線)推導傳遞函數的方法[6-8]。圖6為實驗2的程序流程,實驗結果見圖7(為角頻率)。通過實驗結果的系統Bode圖,可以求取系統的傳遞函數為

并可求出剪切頻率c=117.86 rad/s、相角裕度=47°等開環性能,并分析系統的穩定性、精確性和快速性。
2.3 實驗3——位置PID控制實驗
本實驗對應理論教學中系統的串聯校正設計內容。指導學生掌握PID控制在伺服系統中的使用方法,并熟悉其各環節的作用[9-11]。實驗3的程序流程見圖8,實驗結果見圖9。通過改變不同PID環節參數可得到不同的階躍響應結果,通過多組實驗結果可以分析各環節參數大小對系統性能的影響。

圖6 實驗2的程序流程

圖7 實驗2實驗結果

圖8 實驗3的程序流程
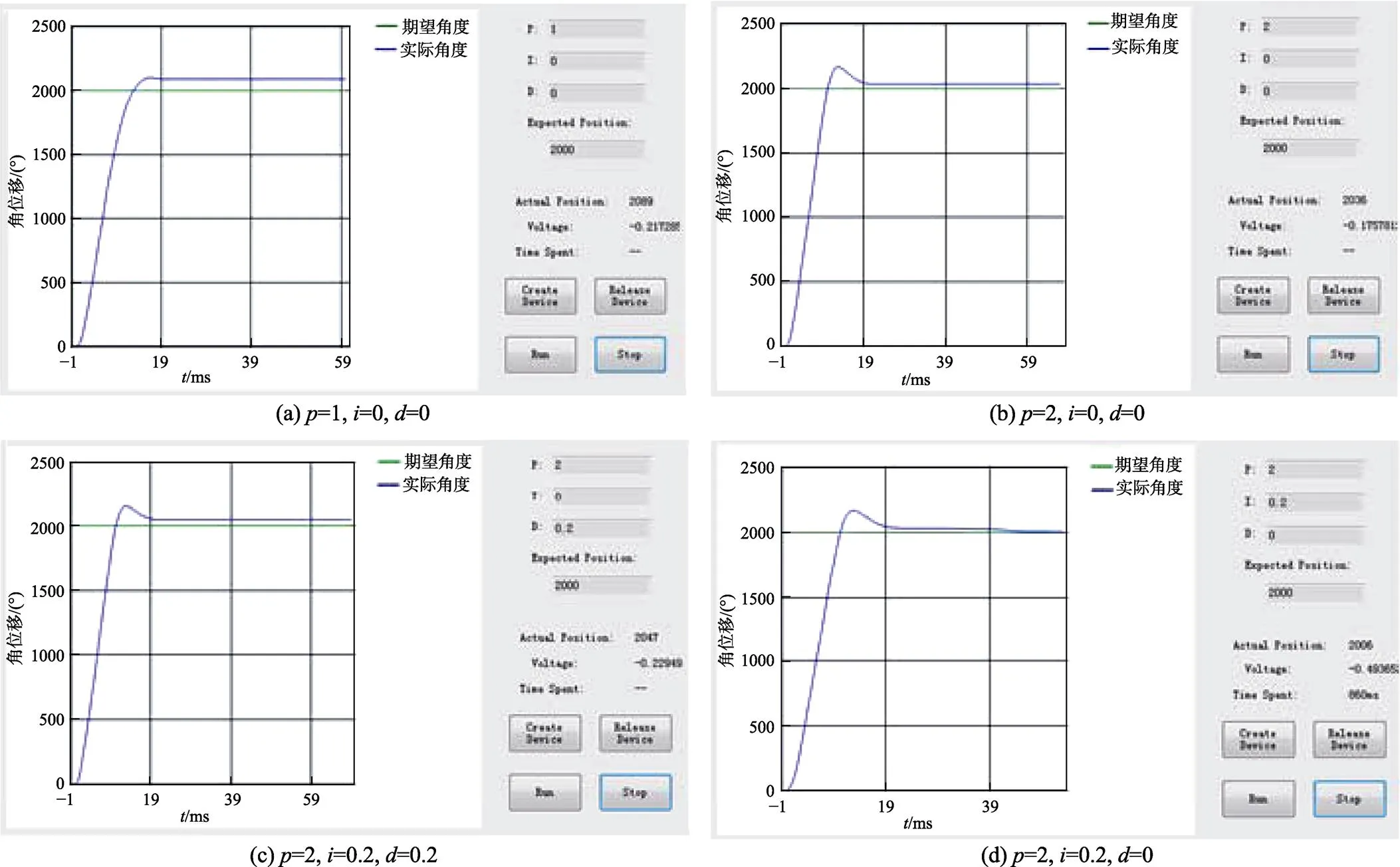
圖9 實驗3實驗結果
2.4 實驗4——串聯校正后的傳遞函數辨識實驗
本實驗對應理論教學中系統的設計內容。指導學生掌握串聯校正與掃頻結合的編程方法,并學習串聯校正對傳遞函數的影響[12-13]。本實驗流程見圖10,實驗結果見圖11,加入串聯校正環節使得系統的傳遞函數改變,通過實驗結果Bode圖求出傳遞函數,與校正前相比較以分析串聯校正的作用。

圖10 實驗4程序流程

圖11 實驗4實驗結果
上述4個實驗涵蓋了機械設計、自動控制元件及電路、驅動控制、傳感器、計算機編程等多門主干課程的關鍵知識點。4個實驗的內容循序漸進,每個實驗側重于解決不同的機電控制問題,幫助學生逐步掌握經典控制理論的工程實用方法。
本實驗體系使用通用軟件編寫實驗程序,可根據實驗內容編制程序,進行內容的擴展,更好地滿足了不同學時的實驗教學需求。
3 結語
在建設機電系統控制基礎課程的實驗過程中,自行研制的硬件可配置、軟件可編程、內容可擴展、參數可調節的實驗裝置,不僅涵蓋了本課程的大部分內容,也充分應用了機械電子學科主干課程的關鍵知識點,有利于培養學生的解決問題的能力,也有利于正確評價學生成績,避免了實驗報告中的抄襲現象。
[1] 袁嫣紅,李廣,賀磊盈,等.機電一體化綜合設計性實驗方法及裝置的研究[J].浙江理工大學學報,2008(3): 297–300, 308.
[2] 李衛清,曹建樹,焦向東.應用型機電類專業實踐教學體系的構建與實踐[J].實驗室研究與探索,2007, 26(10): 88–91.
[3] 孫樹文,楊建武,張慧慧.機電一體化教學培訓系統的設計與實現[J].中國現代教育裝備,2007(6): 79–80, 84.
[4] 曹輝,張俊俊.機電控制技術實驗系統開發[J].大學物理實驗,2017, 30(2): 68–71.
[5] KARA T, EKER I. Nonlinear modeling and identification of a DC motor for bidirectional operation with real time experiments[J]. Energy Conversion and Management, 2003, 45(7/8): 1087–1106.
[6] 黑沫,張連超,廖洪波,等.機電聯合建模在直驅伺服系統設計中的應用[J].光學精密工程,2014, 22(9): 2416–2422.
[7] 郭豪,李寶慧,趙樹忠.基于模糊PID控制的步進電機建模與仿真[J].機械工程與自動化,2018(2): 167–168.
[8] 徐飛,史黎明,李耀華.異步電機在線參數觀測及損耗控制策略[J].中國電機工程學報,2013, 33(6): 112–119.
[9] VIOLA J, ANGEL L, SEBASTIAN J M. Design and Robust Performance Evaluation of a Fractional Order PID Controller Applied to a DC Motor[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 4(2): 304–314.
[10] 王述彥,師宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機械科學與技術,2011, 30(1): 166–172.
[11] 周建萍,薛亞林,崔屹,等.異步電機PI模糊自適應矢量控制策略及其仿真研究[J].微電機,2016, 49(6): 65–69.
[12] RAJARATHINAM K, GOMM J B, YU Dingli, et al. PID Controller Tuning for a Multivariable Glass Furnace Process by Genetic Algorithm[J]. International Journal of Automation and Computing, 2016, 13(1): 64–72.
[13] BHUSHAN B, SINGH M. Adaptive control of DC motor using bacterial foraging algorithm[J]. Applied Soft Computing Journal, 2011, 11(8): 4913–4920.
Multi-parameter adjustable experiment for basic course of Mechanical and Electrical System Control
DONG Huijuan, LI Haoyu, SHI Shengjun
(School of Mechanical and Electrical Engineering, Harbin Institute of Technology, Harbin 150001, China)
An experimental device with configurable hardware, programmable software, adjustable parameters and expandable content for the course is developed. By changing the driving power, driving moment, moment of inertia, friction resistance moment, stiffness of transmission shaft, deceleration ratio, sampling frequency and control parameters of the servo system, the multi-parameters can be adjusted so that students can understand more intuitively the mapping relationship between mechanical and electrical parameters, control parameters and system mathematical model. Four typical control experiments are designed, and the experiment contents not only cover all chapters of this course, but also cover the key knowledge of mechanical design, automatic control components, electronic technology, driving control, sensors, computer programming and other main courses. Through experiment teaching, it is not only helpful to deepen students’ understanding of theoretical knowledge, but also helpful to improve their comprehensive engineering practice ability.
mechanical and electrical system control; experimental device; experiment teaching; system mathematical model
TH-39;G642.423
A
1002-4956(2019)09-0036-05
2019-01-04
黑龍江省教育廳2017年度高等教育教學改革研究一般研究項目“機電系統計算機控制教學方法創新”
董惠娟(1968—),女,河北武邑,教授,博士生導師,主要研究方向為功率超聲波應用技術、光纖傳感技術、機電一體化裝備。
E-mail: dhj@hit.edu.cn
10.16791/j.cnki.sjg.2019.09.010
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
內蒙古教育(2021年20期)2021-03-08 01:09:14
北京測繪(2020年12期)2020-12-29 01:33:58
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
