空射近空間飛行器助推彈道規劃方法
2019-09-26 01:25:46陳志剛
彈道學報 2019年3期
關鍵詞:規劃
楊 明,劉 明,鄭 偉,高 興,陳志剛
(1.國防科技大學 空天科學學院,湖南 長沙 410073;2.空間物理重點實驗室,北京 100076)
空射模式是指由飛機載至空中發射,與地面發射相比較,其發射準備時間短、機動性強、發射成本低。一般空中發射動力系統多采用固體發動機。固體發動機燃燒時間短,要達到要求高度,火箭需采用多級工作模式,一般采用二級或三級,并且級間會增加無動力滑行以滿足終端約束條件。美國軌道科學公司研制的飛馬座空射火箭就是典型的空射火箭,并已進行多次飛行。它是三級固體火箭,由飛機載至空中,水平投放后,火箭按預定飛行程序將載荷運送到預定軌道,飛馬座的成功為運載火箭發射開辟了新的途徑[1-5]。
近空間飛行器一般在臨近空間飛行,臨近空間一般指距地面20~100 km區域。在臨近空間區域飛行,既可以避免目前絕大多數的地面攻擊,又可以提高軍事偵察和對地攻擊的精度,對于情報收集、偵察監視、通信保障以及對空對地作戰等,具有極大的發展潛力[6]。
相對于傳統地面發射或空射高軌道飛行器,空射近空間飛行器助推段彈道具有以下特點:①空射模式下,火箭投放后,一級飛行段需大過載快速拉起;②為了滿足近空間飛行器低交班高度、小交班速度傾角和速度偏角的需求,助推段需采用特殊低彈道的飛行方案;③為實現近空間飛行器不同飛行距離要求,需在助推段進行能量管理,以滿足不同的交班速度需求。這些特點都使得空射近空間飛行器助推段彈道規劃問題變得更加復雜。文獻[7]針對有翼空射運載火箭提出了一種基于飛行程序角的工程設計方法,文獻[8]提出了一種基于自適應遺傳算法的空射運載火箭彈道優化方法,文獻[9]提出了一種基于攻角編碼的遺傳算法的高超聲速飛行試驗助推段彈道優化。以上研究主要是針對高軌道飛行器或地面發射近空間高超聲速飛行器,對空射近空間飛行器助推彈道的研究很少。
本文主要是針對空射近空間飛行器助推彈道規劃問題,結合各飛行段特點,建立多段多約束參數化助推彈道規劃模型,提出了一種適應于工程應用的助推彈道規劃方法,該方法具有很高的求解精度和較快的求解速度,易于工程實現,具有較高工程應用價值。
1 數學描述
1.1 運動方程的建立
為了便于研究,假設地球為均質不旋轉圓球并忽略附加哥氏力的影響,根據火箭受力情況可得到運動方程:
(1)
式中:v為飛行速度;Fp為發動機推力;Fx,Fy,Fz分別為氣動阻力、升力和側向力;α,β分別為攻角和側滑角;θ為速度傾角;ψ為速度偏角;γ為傾斜角;x,y,z為位置三分量;m為飛行器質量;qm為質量流量。
1.2 約束條件參數化模型
空射模式為載機在空中投放運載器后,運載器在一定初速下點火加速并利用氣動力和推力迅速拉起,同時近空間飛行器交班點高度較低,助推段彈道相對運載器或彈道導彈飛行高度較低,轉彎幅度較大,所以在彈道設計時需要考慮過載、控制、子級分離要求和交班點參數要求等約束。
①載荷約束。火箭從飛機投放后,一級發動機點火加速快速拉起。火箭一級飛行主要是在稠密大氣中完成,同時拉起過程中需采用大過載。考慮火箭結構及發動機承載能力,需要對飛行法向過載進行約束,即
(2)
式中:ny為法向過載,Fy1為法向力,nmax為火箭所能承受的最大法向過載。
②控制約束。火箭投放后進入一級飛行段,一級飛行在稠密大氣層完成,并需要在較短時間采用大攻角快速拉起彈道,由于載荷和控制能力的限制,需要對飛行攻角加以限制;二級飛行段飛行高度相對較高,主要考慮控制能力對調姿角速度的適應性,需要對角速度進行限制,同時考慮二級能量管理對側滑角的約束:
(3)
式中:t1為一級點火時間,t2為一級關機時間,t3為二級點火時間,tT為二級關機點時間;αmax1,αmax2分別為一級飛行段和二級飛行段最大可用攻角;βmax為二級飛行段最大可用側滑角;ωcx,max為一、二級姿態角調節角速度最大值。
③子級分離點參數約束。子級分離點參數要求主要包括兩方面:一方面是分離時刻姿態要求和姿態角速度要求,該要求可通過控制變量參數化建模來保證;另一方面,由于一子級分離在大氣層內進行,分離高度過低會導致分離氣動干擾過大,控制系統難以適應,因此需要對分離高度進行限制,即
h(t3)≥hC
(4)
式中:hC為一、二級分離點最低高度。
④終端約束。助推段彈道終端參數需滿足交班點高度、速度、速度傾角和速度偏角等要求,即
(5)

2 彈道規劃方法
2.1 控制變量參數化建模
為了實現火箭投放后快速爬升,一級采用最大過載快速拉起。為了保證低彈道入軌條件,在二級縱向剖面進行程序角參數化設計;為了滿足不同交班速度需求,在二級橫向剖面進行能量管理設計。基于以上考慮,近空間飛行器助推段飛行程序參數化模型可描述如下。
①投放段攻角設計。
該段主要是為了保證飛機和運載火箭安全分離,一般采用定攻角飛行,即
α(t)=α0,t∈(0,t1)
(6)
式中:α0根據飛行器氣動控制特性選擇。
②一級飛行段攻角設計。
對于空中發射,運載火箭一般采用水平投放。為了減小助推段速度損失,火箭水平投放后需要快速拉起爬升穿越稠密大氣層,所以在一級攻角設計時,盡量采用火箭所能承受的最大過載對應的攻角飛行,實現火箭快速拉起爬升。這種情況下跨聲速段大攻角飛行氣動干擾問題靠火箭自身控制能力來保證。

(7)
式中:CN為法向力系數,ρ為大氣密度,h為飛行高度,Ma為飛行馬赫數,Sr為氣動參考面積,δm為火箭噴管擺角;t2s為大攻角拉起結束時間,t2為一級關機點時間,t2s≤t2。
③一級滑行段攻角設計。
該段主要用于調整交班點速度傾角,同時保證一、二級分離高度。
α(t)=αhx,t∈(t2,t3]
(8)
式中:αhx為一級滑翔段飛行攻角,一般取αhx=0,thx=t3-t2,表示一級滑行時間。
④二級飛行段攻角設計。
二級飛行段攻角設計如下:
(9)
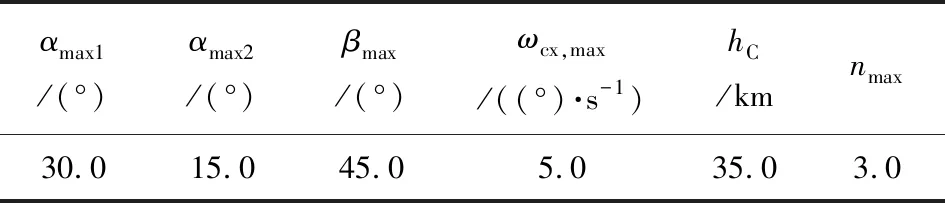
式中:t3為二級點火時間;t4,t5,t6為設計時間。αm為二級飛行最大攻角,αT為要求的交班點攻角。ωcx為二級攻角調節角速度。取tT為二級關機點時間,則t6 ⑤二級能量管理側滑角設計。 為了實現近空間飛行器不同交班條件需求,在二級進行能量管理[10]。為了不影響二級縱向控制交班點精度,考慮在二級通過調整側滑角實現能量管理,其中側滑角設計如圖1所示。 (10) 式中:βm為二級能量管理最大側滑角;t0,tm分別為二級能量管理起始時間和結束時間;tb為側滑角切換時間。 圖1 能量管理側滑角參數化模型 基于以上飛行參數化模型,選取一級大攻角拉起結束時間t2s,一級滑行時間thx,二級飛行最大攻角αm,二級攻角調節角速度ωcx,二級能量管理最大側滑角βm及側滑角切換時間tb等為設計變量。 考慮助推段結束點交班高度、速度、速度傾角以及速度偏角誤差的要求,助推段彈道規劃可表述為在考慮的約束條件下對以下非線性方程組求解: (11) 式中:Δh,Δv,Δθ,Δψ分別為交班點高度偏差、速度偏差、速度傾角偏差和速度偏角偏差。 粒子群算法是一種基于群體智能的優化方法,采用的是速度和位移模式,每個粒子的位置對應一個解,而解的目標函數值作為判定粒子位置優劣的準則。粒子群算法由于具有收斂速度快、易于實現的特點,所以在飛行器優化領域得到了廣泛的應用。 ①優化變量。 基于2.1節中參數化建模,空射近空間飛行器助推彈道優化設計變量為 X=(αmβmt2sωcxthxtb)T (12) ②目標函數。 本文研究空射模式近空間飛行器助推彈道規劃問題,同時還考慮二級能量管理,因此將交班點參數偏差作為目標函數,即 J(X)=min(J1+J2+J3+J4) (13) 式中:J1=λ1Δh,J2=λ2Δv,J3=λ3Δθ,J4=λ4Δψ;λ1,λ2,λ3,λ4為調節系數,通過調節其取值,使得J1,J2,J3,J4量級一致。 ③彈道規劃。 假設Xi=(αm,iβm,it2s,iωcx,ithx,itb,i)T為彈道解算中的一個解,其為粒子群優化算法中的一個粒子,那么在每次搜索中,多個粒子即構成粒子群。根據標準粒子群算法,粒子位置和速度的更新公式如下: (14) 傳統粒子群優化算法存在搜索速度慢,容易陷入局部最優等缺點。研究表明,異步時變學習因子與線性遞減慣性權重配合使用效果較好[11],同時為了克服線性權重不能充分協調全局和局部搜索性能的不足[12],本文采用非線性遞減策略調整慣性權重值。在優化過程中,慣性權重和學習因子取值如下: (15) 表1 仿真約束條件 表2 不同狀態終端約束條件 基于給定的初始參數及約束條件,通過彈道規劃解算,本文給出了5組仿真算例,每組仿真算例對交班條件需求不同,彈道規劃控制參數仿真結果如表3所示,彈道規劃仿真結果如表4所示。 表3 不同狀態控制參數優化結果 表4 不同狀態規劃仿真結果 彈道規劃仿真結果典型彈道參數曲線如圖2~圖6所示。 圖2 高度隨時間變化曲線 圖3 速度隨時間變化曲線 圖4 速度傾角隨時間變化曲線 圖5 速度偏角隨時間變化曲線 圖6 法向過載隨時間變化曲線 從以上仿真分析可知,對應不同交班條件要求,規劃結果均滿足過載、控制及分離等約束和交班點參數要求,其中交班速度精度小于1 m/s,交班高度精度小于2 m,交班速度傾角精度小于0.01°,交班速度偏角精度小于0.01°,可適應不同交班速度的要求。 綜上分析,本文研究的助推段彈道規劃方法可實現多約束下的助推段彈道規劃,并可通過能量管理滿足不同交班速度要求。 本文針對空射近空間飛行器低彈道快速入軌彈道規劃問題,提出了一種適應于工程應用的彈道快速規劃方法,該方法能快速獲得滿足不同交班速度需求的參考彈道。仿真結果表明:交班速度精度小于1 m/s,交班高度精度小于2 m,交班速度傾角精度小于0.01°,交班速度偏角精度小于0.01°;全程過載、控制及分離等過程約束均滿足要求。該方法具有很高的精度和較快的速度,易于工程實現,具有較高工程應用價值,可為空射近空間飛行器方案論證和初步設計提供參考。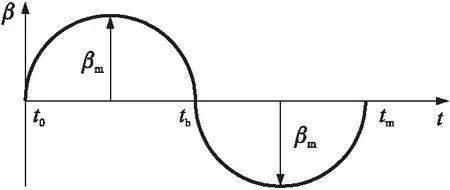
2.2 基于粒子群的彈道規劃方法
3 仿真分析

4 結論
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
