自主水下航行器回旋運動總體參數敏感性分析
2019-09-25 08:06:50劉曜,朱珠
彈道學報 2019年3期
劉 曜,朱 珠
(1.中國船舶重工集團公司第713研究所,河南 鄭州 450015;2.河南省水下智能裝備重點實驗室,河南 鄭州 450015)
隨著我國海洋戰略的發展,自主水下航行器應用越來越廣泛。美國伍茲霍爾海洋研究所研制有遠距離環境監測裝置及深海探測器AUV等產品,國內西北工業大學研發了系列化的重型遠程自主水下航行器,以及系列化的微小型便攜式自主水下航行器。自主水下航行器可應用于海洋探測、海底管路維修、海洋打撈等工作,有效地解決了人們深海作業的難題。打撈等作業活動,需要水下航行器具備穩定的運動特性,總體參數是影響水下航行器回旋運動穩定性的重要因素,國內外對此研究的文獻不多。本文對各總體參數變化對水下航行器回旋特性的影響進行了數值計算和分析,為水下航行器總體參數的優化提供參考和依據[1]。
1 水下航行器六自由度方程
1.1 坐標系定義
航行器坐標系(彈體系):坐標原點位于航行器浮心,Ox軸與縱軸重合指向航行器頭部,Oy軸居于縱對稱面,指向上方。地面系:坐標原點在航行器初始運動時浮心對應水面位置,O0x0軸指向初始運動方向,O0y0軸鉛垂向上。速度系:坐標原點位于浮心,Ox′軸始終與速度矢量方向重合,Oy′軸在航行器縱對稱面,指向上方。3種坐標系均為右手直角坐標系,z軸由右手法則確定,坐標示意見圖1,圖2為水下航行器結構示意圖。
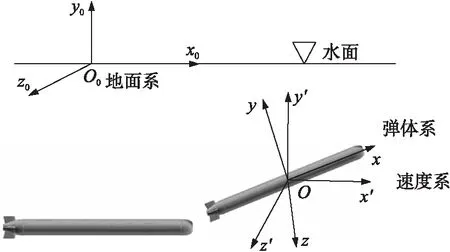
圖1 水下航行器坐標系定義

圖2 水下航行器結構示意圖
1.2 動力學方程
在彈體系中建立動力學方程組,彈體系的原點位于水下航行器浮心。設航行器運動的角速度ω及浮心處的速度v在彈體系中的3個分量分別為ωx,ωy,ωz,vx,vy,vz;航行器的質量為m,質心在彈體系中的坐標為(xc,yc,zc)。根據動量和動量矩定理[2]:
mzc(vzωx-vxωz)+(Jz-Jy)ωyωz
mxc(vxωy-vyωx)+(Jx-Jz)ωzωx
myc(vyωz-vzωy)+(Jy-Jx)ωxωy
(1)
式中:Fx,Fy,Fz,Mx,My,Mz分別為作用在航行器上的外力F和力矩M在彈體系中的分量,包括理想流體慣性力、流體黏性位置力、流體黏性阻尼力、浮力、重力、軸推螺旋槳推力、垂推旋槳推力、側推旋槳推力和舵力(矩);Jx,Jy,Jz為航行體轉動慣量。
1.3 運動學關系式
水下航行器轉動是由3個姿態角(俯仰角θ、偏航角ψ、橫滾角φ)描述,轉動角速度(在彈體系分量為ωx,ωy,ωz)與3個姿態角變化率的關系式即為航行器轉動的運動學關系式:
(2)
(3)
(4)
1.4 攻角和側滑角
(5)
式中:α為攻角,β為側滑角。
2 水下航行器回旋特性
2.1 回旋狀態仿真
回旋狀態是水下航行器重要的一種運動模式,回旋半徑、時間和回旋一周深度變化是航行器重要的特性參數[3]。針對參考狀態,即水下航行器軸向推力20 N、浮力Fb=5 N、重心浮心距dc=0 mm、重心下移量dy=10 mm、重心側移量dz=1 mm、垂直舵25°的回旋狀態進行了仿真。仿真時間為200 s。圖3為水下航行體參考狀態的空間運動曲線。
2.2 浮力敏感性
在保持參考彈道其他參數不變的情況下,取浮力Fb=10 N的情況進行了仿真計算,結果如圖4~圖7所示。
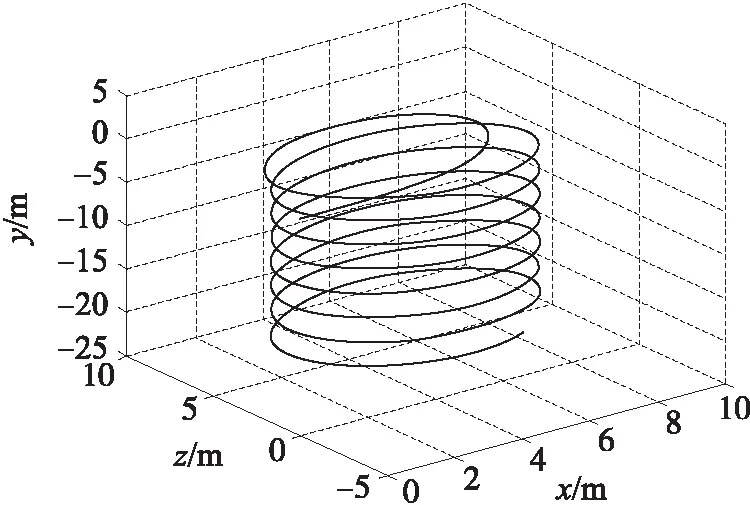
圖3 參考狀態的空間運動曲線

圖4 浮力變化對回旋速度的影響
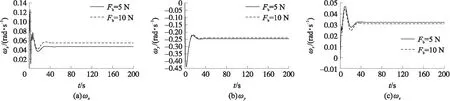
圖5 浮力變化對回旋角速度的影響
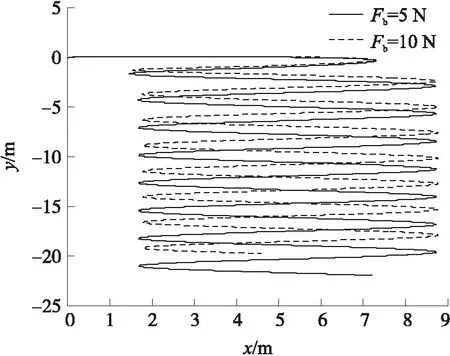
圖6 浮力變化對回旋深度的影響

圖7 浮力變化對回旋空間運動的影響
2.3 重心浮心距敏感性
在保持參考彈道其他參數不變的情況下,取重心在浮心前dc=10 mm、重心在浮心后dc=-10 mm的情況進行了仿真計算,結果如圖8~圖11所示。
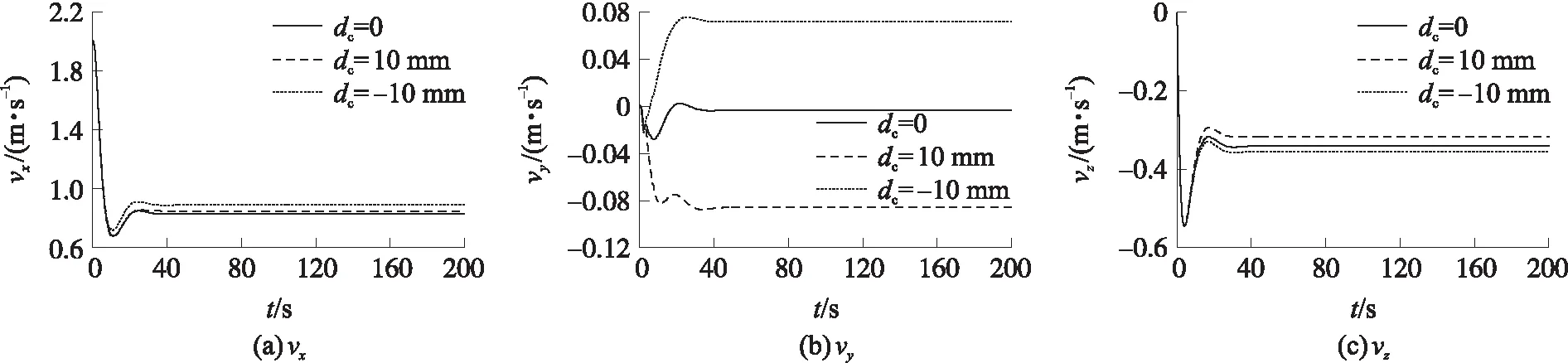
圖8 重心浮心距變化對回旋速度的影響

圖9 重心浮心距變化對回旋角速度的影響
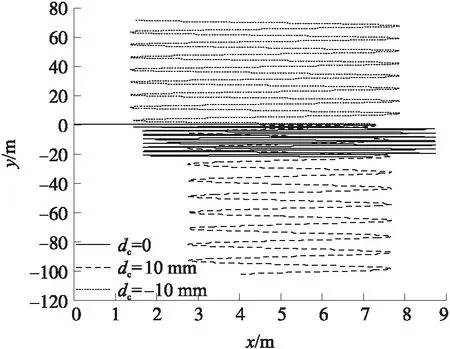
圖10 重心浮心距變化對回旋深度的影響
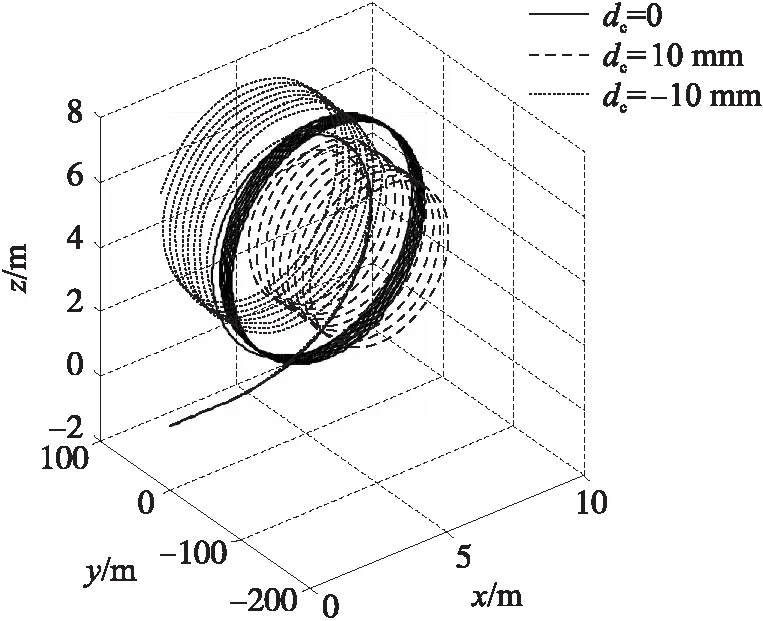
圖11 重心浮心距變化對回旋空間運動的影響
2.4 重心下移量敏感性
在保持參考彈道其他參數不變的情況下,取重心在浮心下dy=-15 mm情況進行了仿真計算,結果如圖12~圖15所示。
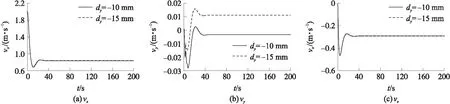
圖12 重心下移量變化對回旋速度的影響
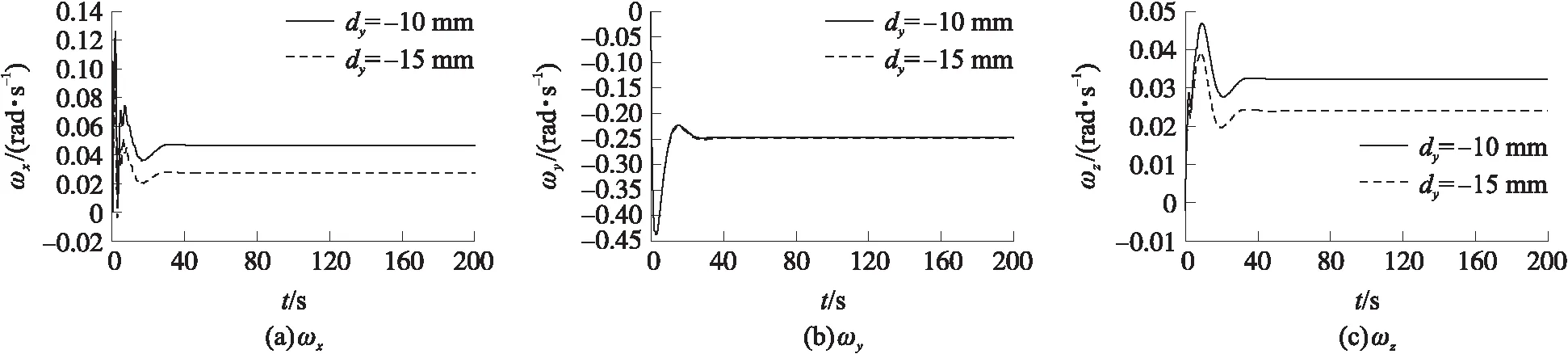
圖13 重心下移量變化對回旋角速度的影響
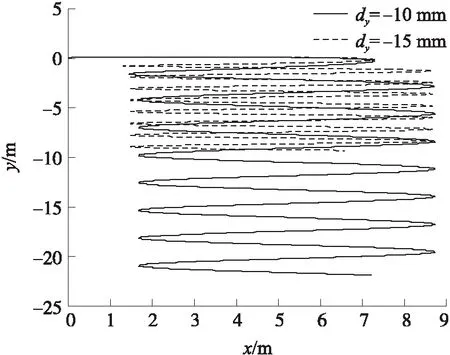
圖14 重心下移量變化對回旋深度的影響
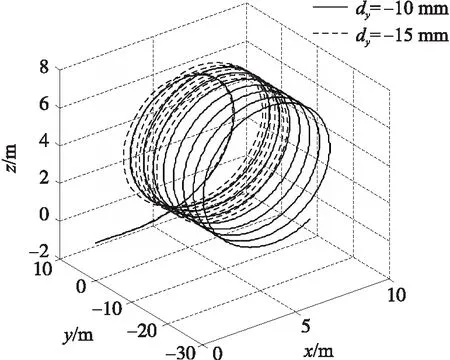
圖15 重心下移量變化對回旋空間運動的影響
2.5 重心側移量敏感性
在保持參考彈道其他參數不變的情況下,取重心側移量dz=3 mm情況進行了仿真計算,結果如圖16~圖19所示。
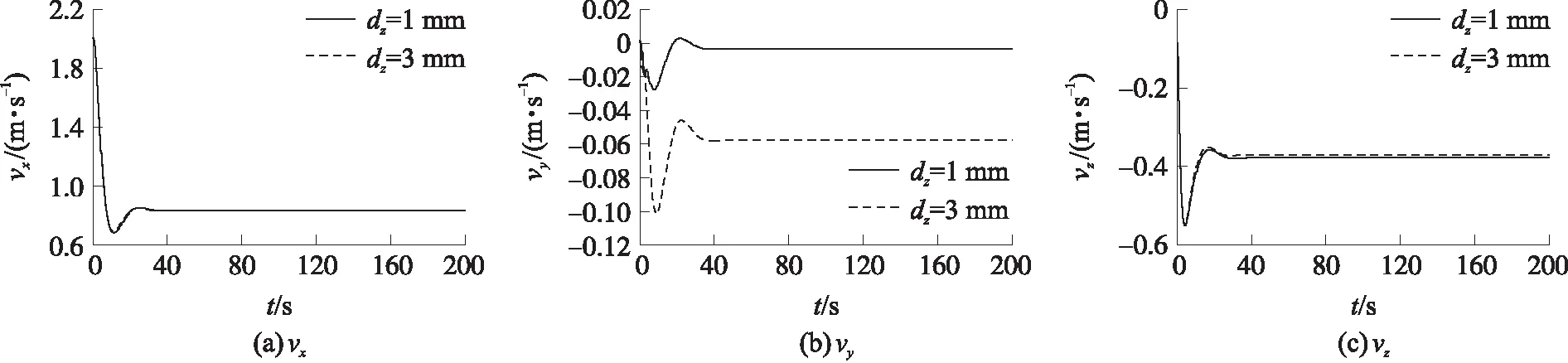
圖16 重心側移量變化對回旋速度的影響
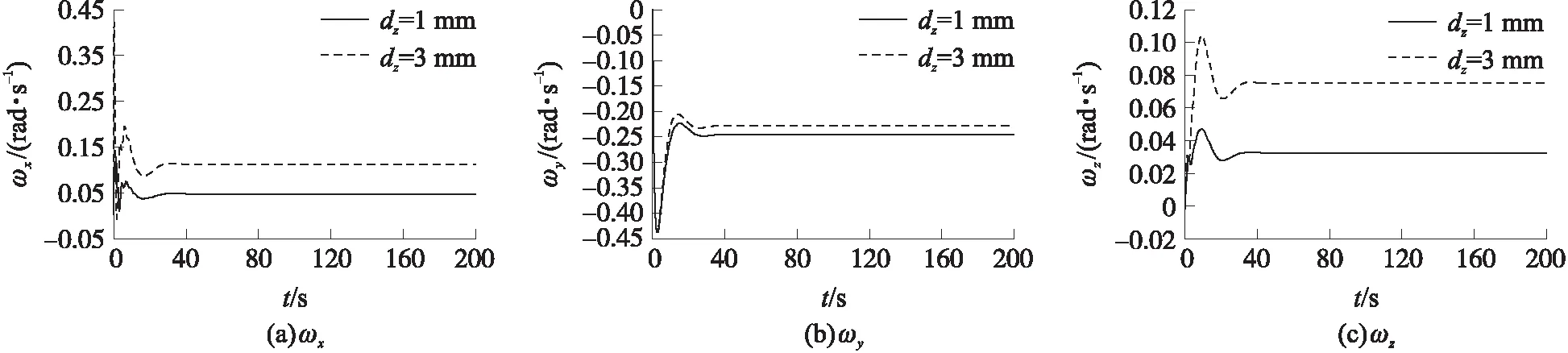
圖17 重心側移量變化對回旋角速度的影響
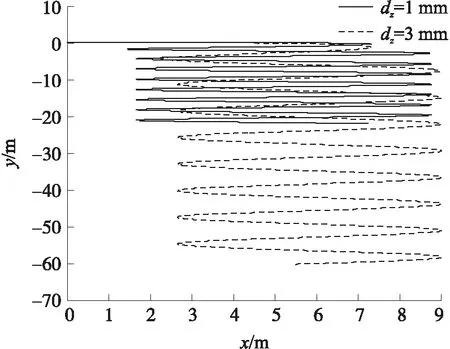
圖18 重心側移量變化對回旋深度的影響
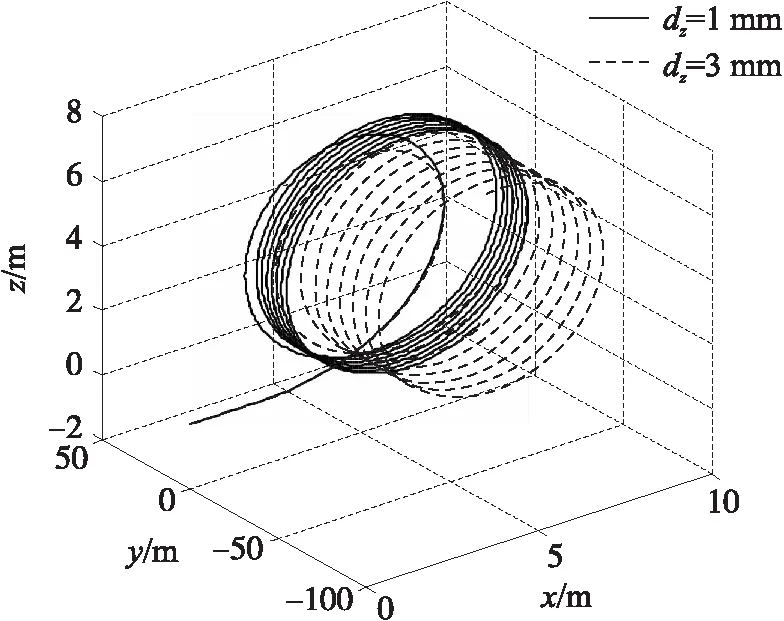
圖19 重心側移量變化對回旋空間運動的影響
2.6 總體參數敏感性分析
根據以上仿真結果分析得:
①在參考狀態下,航行器在200 s的時間內完成了8圈回旋,回轉半徑不大于5 m,回旋深度約20 m,航行器每回旋一周平均下沉2.5 m;回旋過程中俯仰角θ在-1°~1°間變化、橫滾角φ在-3°~3°間變化,偏航角持續線性增加。
②浮力變化對水下航行器運行特性影響不大,當浮力由5 N增大到10 N時,航行器的運行速度、姿態、回旋下沉深度和空間運動路徑基本與參考狀態一致。
③重心浮心距的變化會使水下航行器的運行俯仰角發生變化。當重心在浮心前時會產生向下的俯仰角,產生向下的速度(即vy為負),因而每回旋一周的下沉深度大于參考狀態;當浮心在重心前時會產生向上的俯仰角,產生向上的速度(即vy為正),因而每回旋一周將上浮一定的距離。由計算結果可得:參考狀態下,200 s時間內水下航行器回旋下沉深度約20 m;重心在浮心前10 mm狀態下,水下航行器回旋下沉深度約100 m;重心在浮心后10 mm狀態下,水下航行器回旋上浮深度約70 m。
④重心下移量增大能提高水下航行器運行的穩定性,當重心下移量由10 mm增加到15 mm時,水下航行器運動穩定性增加,由橫滾所產生的向下的速度減小,因而使航行器回旋下沉的深度顯著減小。由計算結果可得:參考狀態下,200 s時間內水下航行器下沉深度約20 m;重心下移量15 mm狀態下,水下航行器下沉深度約10 m。
⑤重心側移量增大將降低水下航行器運行的穩定性,當重心側移量由1 mm增加到3 mm時,水下航行器運動穩定性降低,由橫滾所產生的向下的速度增大,因而使航行器回旋下沉的深度顯著增大。由計算結果可得:參考狀態下,200 s時間內水下航行器下沉深度約20 m;重心側移量3 mm狀態下,水下航行器下沉深度約60 m。
3 結束語
本文在建立水下航行器六自由度空間運動方程的基礎上,運用MATLAB/Simulink模塊對水下航行器的空間回旋狀態進行了數值仿真,并對各總體參數變化對水下航行器回旋特性的影響進行了數值計算和分析,得到了總體參數對水下航行器空間回旋運動的影響規律:①浮力變化對水下航行器的運行速度、姿態、回旋下沉深度、空間運動路徑的影響不大;②重心浮心距的變化會使水下航行器的運行俯仰角發生變化;③重心下移量增大能提高水下航行器運行的穩定性,重心側移量增大將降低水下航行器運行的穩定性。以上結論可以直接應用于水下航行器的設計和總體參數優化。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
