深水、大流速橋梁水下檢測技術的實踐與探討
2019-09-21 07:57:02張鈺豐
國防交通工程與技術 2019年5期
張鈺豐
(鐵道戰備舟橋處,山東 德州 251100)
1 工程概況
包蘭線東崗鎮黃河鐵路大橋位于甘肅省蘭州市郊,該橋1954年11月開工建設,1956年5月建成通車,是1950年代國內有代表性的鋼筋混凝土鐵路拱橋之一。該橋位于黃河上游,橋址處兩岸峭壁矗立,水流湍急,每年五月上游雪融、春汛來勢較猛,夏秋間汛期流量大、水位高。東崗鎮黃河鐵路大橋結構形式見圖1所示。正橋橋墩基礎采用鋼板樁圍堰筑島沉井,1號墩沉井僅一節,高4.0 m;2號墩沉井全高5.4 m。沉井頂低于島面部分用木圍堰。沉井截面為六角形,嵌入巖層約0.8 m。因流冰及水流湍急,墩身亦采用六角形截面。沉井頂至流冰水位以上1 m處,以花崗巖料石鑲面,作為破冰凌。橋址處河床覆蓋層為砂夾卵石,主墩基礎嵌入巖層僅0.8 m;基礎埋置較淺,極易被淘空。尤其是1#墩、2#墩位于河道中間,長期處于大流速、河流沖刷及受流冰、流凌和漂浮物等影響。老橋飽經滄桑,水中基礎由于結構形式、建造條件,受特殊水情、氣候影響較大,橋墩及水下基礎使用狀況不明,橋墩周邊河床沖刷也不明,橋墩水下部分自建橋起至今,沒有進行過水下檢測。因此,為確保鐵路橋梁和運輸安全,亟需進行大橋水下基礎檢測,掌握其健康狀況。

圖1 東崗鎮黃河鐵路大橋結構形式(單位:cm)
2 檢測難點及總體方案
2.1 檢測難點
2017年2月份,鐵道戰備舟橋處對包蘭線東崗鎮黃河鐵路大橋進行水下檢測作業。在實施水下檢測作業時,現場存在以下難點:
一是受每年春夏汛期影響,此時段黃河流量大、水位較高,水流湍急,流速達2 m/s左右,無法實施潛水作業,水上作業安全風險極大,此時段無法實施橋梁水下檢測作業。
二是此段黃河冬灌之后(11月中旬至次年2月底),水位相對較低,流速相對較小(流速1 m/s),能夠滿足潛水作業,但氣溫較低(達零下15 ℃),給水下作業帶來較大困難。
三是橋位處水文相當復雜,此橋位處河面較窄,而橋位上下流河面相對較寬,同時受地勢和橋墩阻水影響,橋墩處水深、流急,尤其是水下渦流、暗流極為復雜。起初潛水員著輕潛裝備下水,受水流沖擊作用,無法正常下潛至預定位置,安全風險較大。隨后采取設置定位繩、移動繩以及增加配重等潛水輔助措施。雖然潛水員能達到河床表面,但受水下亂流影響,潛水員無法站立,更無法進行水下探摸和水下攝像作業,幾秒后被沖出水面,效果均不理想。實踐證明,在此復雜水文條件下,常規方式輕潛作業無法實施水下檢測作業。
四是受上下游水庫蓄水、放水影響,橋位處水位每天變化不定,流速變化較大,平潮時段時間短,且無規律可循。
五是此河段位于黃河上游,除小型旅游小艇外,無其它船只,無法為水上作業設備提供安全穩定的浮平臺,給水上安全作業帶來了困擾。
在此水文、氣候、作業環境等條件下,對大橋基礎實施水下檢測,必須提出安全可靠、切實可行的創新性輔助措施和技術手段。
2.2 總體方案
根據2月份實施的水下檢測實踐和掌握的水文等情況,以“橋梁檢測必安全,橋梁檢測保安全”為基本原則,圍繞“準備充分、多案并舉”的總體思路,通過多次研究論證,確定總體實施方案如下[1-2]:
(1)選擇最佳作業時期。此次檢測選在冬季,即黃河冬灌之后,此階段黃河流速相對較小,可大大降低水下作業風險;同時,水質相對較清,便于水下探摸和攝像。
(2)創新提出利用舟橋器材拼組成檢測平臺。采用6節多用途浮箱拼組成浮平臺,并布設錨碇設施,為潛水作業、潛水輔助裝置的安裝和使用、水下攝像及相關設備提供安全穩定的浮平臺;利用新型994機動舟作為浮平臺的頂推設備,同時,為多波束測深系統和浮平臺移動提供安全可靠的動力保障。
(3)創新提出采用多波束測深系統、三維圖像聲吶、水下機器人等多種先進水下檢測儀器設備,以實施多層次、多手段檢測方式作業。首先,采用多波束測深系統對橋位處河床進行掃測,掌握墩位處的水深以及河床的地形地貌情況;然后,應用三維圖像聲吶對橋墩及基礎進行掃測,將橋墩及基礎以三維圖像顯示;再次,采用水下機器人對基礎實施全面攝像,全面掌握水下結構情況。通過先進儀器的檢測,查找到水下橋墩及基礎的薄弱環節,明確了潛水員水下探摸、攝像的重點、關鍵部位[3]。
(4)科學提出了重潛檢測,輕潛救援的水下作業方式。一方面因作業時段氣溫較低,輕潛無法抵御寒冷,會給潛水員身體帶來很大影響,且作業效率較低。另一方面因流速較大、渦流復雜,輕潛配重不夠,難以著河床作業,潛水員在水流作用下,漂浮不定,非常不安全。經研究,采用重潛直供氣方式對重點部位進行水下探摸、攝像檢測作業,詳細查找河床局部沖刷、淘空,基礎及橋墩沖蝕、損壞、裂縫等結構病害;輕潛作為應急救援措施,確保檢測安全。
(5)創新研制了潛水梯、潛水籠等輔助設施。潛水梯底端支撐在河床上,上部依靠在浮平臺側,潛水員可沿潛水梯上下水,直接著床實施檢測作業,規避了潛水員在水流作用下漂浮影響。潛水籠是避流裝置,以克服大流速、渦流、亂流等不利因素。潛水籠懸掛于浮平臺一側,設有導向框架和升降籠。升降籠三面設圍板,能有效避流。潛水員站在升降籠中,不受流速影響,通過水上作業人員的調整,能夠升降作業,有效解決了特殊水文條件下潛水員無法實施水下作業的難題,確保了潛水作業安全。
3 檢測作業流程
橋梁水下檢測作業流程為:第一步機動舟等水上動力設備下水;第二步采用雙頻測深對橋位處及上下游各25 m處河床斷面進行測量;第三步依據雙頻測深儀測得的水深數據,對多波束測深系統相關參數進行設置,對橋位處及上、下游50 m范圍內河床地形地貌進行全方位掃測;第四步采用三維圖像聲吶對橋梁水下基礎進行掃測;第五步通過掃測結果確定潛水員入水深度和重點檢測部位,可以很大程度降低潛水員的作業強度。采用安裝到浮平臺一側的潛水輔助裝置和潛水梯進行水下探摸和水下攝像等檢測作業,同時采用水下機器人ROV水下作業進行比對;最后進行數據整理分析,形成檢測報告。水下檢測作業流程見圖2所示。
4 檢測作業
4.1 河床斷面測量
對橋位處、橋位上下游各25 m處河床斷面進行測量,繪制河床斷面圖,通過河床斷面圖對比,分析河道變遷及河床沖刷、淤積情況及對橋徑渡洪能力的影響。測量時,在機動舟船舷一側安裝HD380雙頻測深儀,與iRTK智能定位儀連掛,進行水中河床斷面測量。同時,通過對橋位范圍的水深測量,掌握河床大致高差情況,為多波束測深系統掃測設置計劃線提供依據。經測量,橋位上流水深較淺,在3~4 m左右;橋位下游水相對較深,在7~8 m左右;橋位處局部水較深,在8~9 m左右。
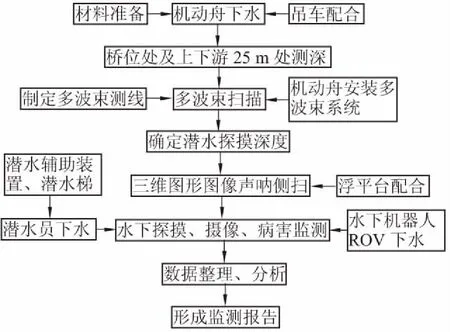
圖2 水下檢測作業流程
4.2 多波束測深系統掃測河床
采用多波束測深系統對橋位處及上、下游50 m范圍內河床地形地貌全方位掃測,將河床的地形、地貌生成三維圖像。一是全面掌握橋位范圍內的河床地形地貌,有無沖刷、淤積,河床的變化情況和河床覆蓋層的土質特征;二是查找橋基有無局部沖刷、淘空等病害,周邊有無堆積物、拋填物等;三是取得詳細的河床標高,為潛水輔助裝備的安裝提供可靠依據。和傳統潛水攝像相比較,現在的多波束測深技術不但可以對河床底部地形地貌進行全覆蓋測量,還可以定量測定出橋樁基礎周圍的沖刷情況,且安全快捷。
作業時,技術人員首先根據雙頻測深儀測量水域的水深數據和多波束換能器掃測角度,設計規劃計劃線。然后,將多波束換能器安裝到機動舟船舷一側水下50 cm處,慣導系統安裝在甲板上,數據處理主機安裝在船艙內,根據計算好的計劃線,進行河道掃測作業,并隨時監控好掃測數據,確保無死角。掃測結果見圖3。根據這次數據分析,1#和2#橋墩大樁號側基礎四周局部沖刷明顯,基礎嵌入巖層的深度已經減少至0.5 m;與原設計對比,1#和2#橋墩大樁號側基礎周圍已經產生了20~30 cm的沖刷溝。
4.3 三維圖像聲吶側掃基礎
應用三維圖像聲吶掃測,本系統主要由甲板聲吶圖像處理器、換能器、水下電纜、采集工作站等組成。本次采用支架上端與浮平臺邊緣焊接的安裝方式進行掃測,將橋墩及基礎成三維圖像顯示,以查找基礎沖刷、淘空病害及橋墩結構病害。通過在圖像上量取可得1#橋墩小樁號側河底到橋樁基礎頂端高度為3.421 m,與多波束數據3.4 m相吻合。三維圖像聲吶側掃1#橋墩結果見圖4所示。
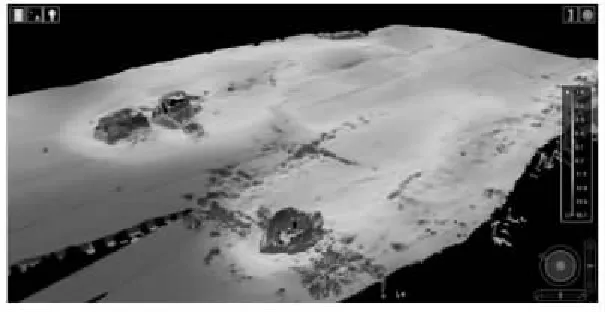
圖3 多波束掃測河床地形圖

圖4 三維圖像聲吶側掃1#橋墩
4.4 水下機器人(ROV)攝像檢測
水下機器人是一種自帶推進動力的水下攝像設備,由水下機械人和云控制臺組成,在水上作業人員操控下實施航行、潛水和水下攝像等作業,以逐步取代潛水員水下攝像等繁重作業。控制臺安裝在機動舟甲板上,ROV由船邊航行至墩位處。由于墩位處渦流、亂流復雜,本次采用的為觀察型ROV,推動力相對不足,無法抵御水流作用,未能有效的進行水下攝像作業。以后遇到類似情況,可采用大功率的水下作業型ROV,用于抵御水流作用。ROV水下作業情況見圖5所示。
4.5 重潛水下檢測作業
本次潛水員著重潛潛水服下水實施檢測作業。穿戴好潛水服后,潛水員沿著潛水梯下水,直接著床到橋墩基礎處,對橋基周邊局部沖刷情況進行水下探摸和攝像;同時,浮平臺輔助人員抓好潛水員的安全繩,以克服大流速、渦流、亂流等不利因素影響;另一名潛水員穿戴輕潛潛水服作為應急救援,以保障潛水員能安全順利完成水下探摸和水下攝像等檢測作業。
潛水員下水后,發現橋墩周圍渦流、亂流較大,作業難度較高。基礎周邊基本無覆蓋層,局部位置有較大尺寸片石。經潛水員對1#、2#墩墩身、沉井基礎及周邊河床詳細探摸、攝像,未發現基礎局部淘空、裸露等病害,水下結構狀況良好。潛水員實施水下檢測作業現場情況見圖6所示。

圖5 ROV作業
5 結束語
東崗鎮黃河鐵路大橋水下檢測作業環境復雜、檢測難度高、安全風險大。舟橋處檢測隊積極探索研究,多案并舉,多層保障。一是充分發揮舟橋優勢,拼組檢測浮平臺,為檢測作業提供可靠設施;二是研究設計了潛水梯、潛水輔助裝置,為潛水作業提供了安全保障;三是首次將多波束測深系統、三維圖形聲吶等水下地形測量儀器應用到橋梁水下檢測中,實現了全方面、全方位檢測,提高了檢測效率;四是采用重潛檢測、輕潛救援的水下作業方式,使水下檢測作業更安全。在檢測過程中,全體檢測人員克服重重困難,積極研究攻關,最終高標準、高質量完成了水下檢測任務。

圖6 潛水員水下檢測作業
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
