基于激光連續(xù)掃描的彎曲管路工作變形測(cè)試方法
2019-09-17 09:58:36臧朝平張讓威王曉偉
航空發(fā)動(dòng)機(jī) 2019年4期
張 弓,臧朝平,張讓威,李 繁,王曉偉
(1.南京航空航天大學(xué)能源與動(dòng)力學(xué)院,南京210016;2.中國航發(fā)沈陽發(fā)動(dòng)機(jī)研究所,沈陽110015)
0 引言
航空發(fā)動(dòng)機(jī)管路一般用于輸送燃油、滑油和空氣等介質(zhì),是航空發(fā)動(dòng)機(jī)的重要零件。長(zhǎng)期以來,由于受到轉(zhuǎn)子不平衡力和風(fēng)扇氣動(dòng)激勵(lì)等外界激勵(lì),發(fā)動(dòng)機(jī)管路系統(tǒng)一直存在振動(dòng)故障問題[1]。振動(dòng)因素是發(fā)動(dòng)機(jī)導(dǎo)管及導(dǎo)管支架斷裂的主要原因,因此,了解發(fā)動(dòng)機(jī)管路的動(dòng)力學(xué)特性,對(duì)管路的結(jié)構(gòu)優(yōu)化設(shè)計(jì)和防止管路故障的發(fā)生具有重要意義。管路的動(dòng)力學(xué)特性測(cè)試通常采用傳統(tǒng)的接觸式加速度傳感器或應(yīng)變片進(jìn)行。加速度傳感器的附加質(zhì)量會(huì)影響測(cè)試結(jié)果的精度,同時(shí)還存在傳感器布置測(cè)點(diǎn)的數(shù)目有限、測(cè)點(diǎn)空間的分辨率低和測(cè)試信息不完備等缺陷;而應(yīng)變片粘貼工藝復(fù)雜,并且難以測(cè)試管路振型,多用來分析管路振動(dòng)頻率。近年來,掃描激光多普勒振動(dòng)測(cè)試技術(shù)(Scanning Laser Doppler Vibrometry,SLDV)憑借非接觸測(cè)試和測(cè)試便捷等優(yōu)點(diǎn)得到發(fā)展并被廣泛使用。SLDV測(cè)試是1種成熟的離散點(diǎn)掃描激光測(cè)振技術(shù),可以有效地測(cè)試結(jié)構(gòu)頻響函數(shù),準(zhǔn)確獲取結(jié)構(gòu)固有頻率、阻尼比及模態(tài)振型[2-5]。
雖然SLDV測(cè)試可以在一定程度上提高測(cè)點(diǎn)的密集程度,但并未從本質(zhì)上解決測(cè)點(diǎn)分辨率低的問題[6],且測(cè)試時(shí)間較長(zhǎng)。在此基礎(chǔ)上,研究者提出了連續(xù)掃描激光多普勒振動(dòng)測(cè)試技術(shù)(Continuous Scanning Laser Doppler Vibrometry,CSLDV)。CSLDV 測(cè)試通過控制激光點(diǎn)在試驗(yàn)件表面以連續(xù)運(yùn)動(dòng)的方式采集振動(dòng)信號(hào),通過相應(yīng)的數(shù)據(jù)處理方法得到試驗(yàn)件測(cè)點(diǎn)密集的工作變形(Operational Deflection Shape,ODS)。CSLDV測(cè)試在國外起步早,發(fā)展較為成熟,已實(shí)現(xiàn)了梁[7]、板、圓盤[8]、葉片[9]和圓筒結(jié)構(gòu)[10-11]的連續(xù)掃描測(cè)試。國內(nèi)陳強(qiáng)、宋安平等[12-13]實(shí)現(xiàn)了板梁結(jié)構(gòu)的試驗(yàn)測(cè)試;覃斌、李暉等[14-15]實(shí)現(xiàn)了圓筒結(jié)構(gòu)的激光連續(xù)掃描振動(dòng)測(cè)試。但是在工程應(yīng)用中,實(shí)際結(jié)構(gòu)較為復(fù)雜,大多不是簡(jiǎn)單的板梁結(jié)構(gòu),例如航空發(fā)動(dòng)機(jī)外部管路具有復(fù)雜的彎曲結(jié)構(gòu),使得激光連續(xù)掃描測(cè)振技術(shù)實(shí)用性不強(qiáng)。
本文針對(duì)彎曲管路結(jié)構(gòu),根據(jù)曲線激光連續(xù)掃描原理,進(jìn)行了ODS測(cè)量和分析,并進(jìn)行了方法驗(yàn)證。
1 曲線激光連續(xù)掃描工作變形測(cè)試方法
掃描式激光測(cè)振儀在激光前端配有1套軸線正交的掃描鏡片,分別由2個(gè)電極驅(qū)動(dòng),作為激光掃描位置的執(zhí)行機(jī)構(gòu),如圖1所示。鏡片的掃描角度由電極的輸入電壓控制,并且存在一定的線性關(guān)系

式中:琢x和琢y為X和Y方向鏡片的偏轉(zhuǎn)角度;Vx和Vy為X和Y方向電機(jī)的輸入電壓;S為比例系數(shù)。
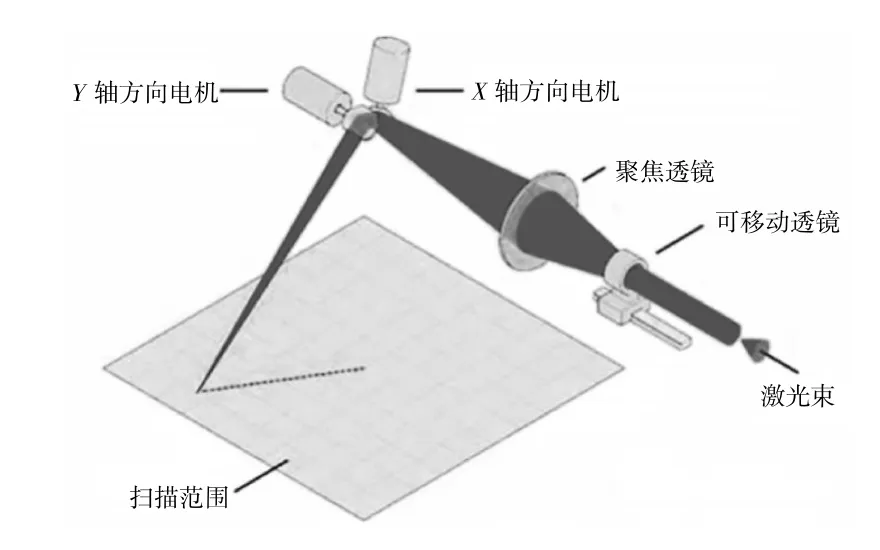
圖1 激光掃描系統(tǒng)
本文使用的掃描式激光測(cè)振儀型號(hào)為Polytec-PSV-400-3D,其比例系數(shù)S=4毅/V。掃描鏡片偏轉(zhuǎn)角度決定了激光掃描點(diǎn)的位置,并且一一對(duì)應(yīng)。
曲線掃描路徑計(jì)算的基礎(chǔ)是線段的坐標(biāo)轉(zhuǎn)換。已知水平線段兩端坐標(biāo)分別為A(x1,0)和B(x2,0),轉(zhuǎn)換后的端點(diǎn)坐標(biāo)分別為A'(x'1,y'1)和B'(x'2,y'2),2個(gè)線段上的點(diǎn)一一對(duì)應(yīng),點(diǎn)集為映射關(guān)系。
轉(zhuǎn)換后的坐標(biāo)與轉(zhuǎn)換前坐標(biāo)可表示為線性變換

式中:a1、a2、b1和 b2為轉(zhuǎn)換系數(shù)。
將轉(zhuǎn)換前后線段端點(diǎn)坐標(biāo)帶入式(2),得到
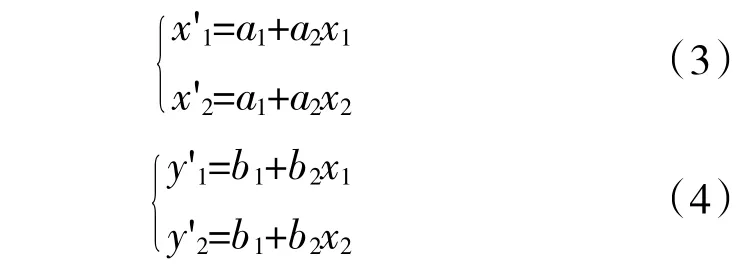
表示成矩陣形式為
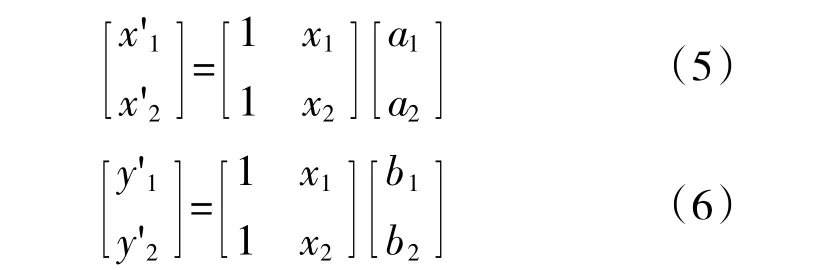
可求得轉(zhuǎn)換系數(shù)為
求得轉(zhuǎn)換系數(shù),即建立了2個(gè)點(diǎn)集之間的映射關(guān)系。如發(fā)動(dòng)機(jī)外部管路中彎管有3段直線和2段彎曲部分,直線部分可在直線兩端標(biāo)記標(biāo)定點(diǎn),彎曲部分則需要選擇更多的標(biāo)記點(diǎn),用多段線段逼近曲線。在曲線掃描中標(biāo)定點(diǎn)就是進(jìn)行坐標(biāo)變換線段的端點(diǎn),2個(gè)標(biāo)定點(diǎn)之間的區(qū)域就是進(jìn)行坐標(biāo)變換的線段。彎管UG模型及其選擇的標(biāo)定點(diǎn)如圖2所示。

圖2 彎管UG模型及其標(biāo)定點(diǎn)
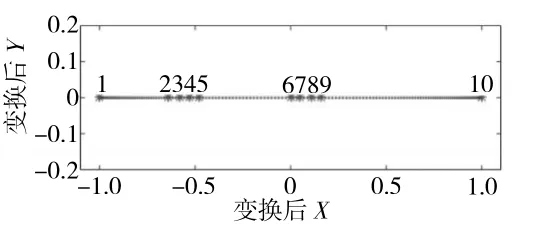
圖3 歸一化坐標(biāo)下標(biāo)定點(diǎn)和掃描點(diǎn)
在激光線掃描測(cè)試中,路徑被定義在歸一化坐標(biāo)中,即x綴[-1,1],實(shí)際掃描區(qū)域?yàn)榍€,總的掃描長(zhǎng)度為各段掃描線段的總和,記為l,根據(jù)每段掃描線段的長(zhǎng)度和總長(zhǎng)度l,將標(biāo)定點(diǎn)轉(zhuǎn)換到歸一化坐標(biāo)中在歸一化坐標(biāo)中,標(biāo)定點(diǎn)和激光掃描點(diǎn)如圖3所示。激光為正弦速度掃描,因此激光點(diǎn)之間的距離呈正弦規(guī)律變化。
10個(gè)標(biāo)定點(diǎn)將彎管分為9個(gè)區(qū)間,通過坐標(biāo)變換前后端點(diǎn)標(biāo)定點(diǎn)的坐標(biāo),分別將9個(gè)區(qū)間內(nèi)的歸一化坐標(biāo)激光掃描點(diǎn)變換到實(shí)際坐標(biāo),得到沿管路的曲線掃描線,如圖4所示。后期數(shù)據(jù)處理所得到的管路工作變形也是在歸一化坐標(biāo)下,同樣依此法將歸一化工作變形轉(zhuǎn)換為實(shí)際坐標(biāo)工作變形。
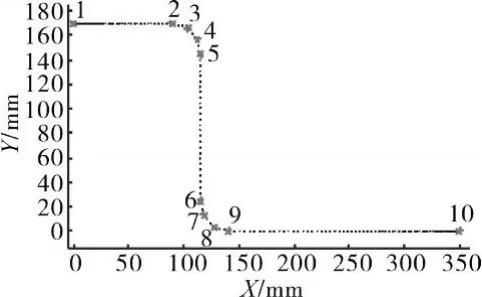
圖4 實(shí)際坐標(biāo)下標(biāo)定點(diǎn)和掃描點(diǎn)
2 曲線管路測(cè)試試驗(yàn)驗(yàn)證
2.1 SLDV測(cè)試
為了驗(yàn)證曲線激光連續(xù)掃描測(cè)試方法的準(zhǔn)確性,選擇1個(gè)方向進(jìn)行激光SLDV和CSLDV測(cè)試,并將SLDV測(cè)試振型作為評(píng)價(jià)CSLDV測(cè)試的基準(zhǔn)。
以某發(fā)動(dòng)機(jī)外部部分彎曲管路作為研究對(duì)象,彎管在模態(tài)測(cè)試中測(cè)點(diǎn)布置如圖5所示。
測(cè)試采用力錘激勵(lì),使用橡皮繩懸掛彎管,彎管總長(zhǎng)為0.57 m,模擬自由邊界條件,共設(shè)置19個(gè)測(cè)點(diǎn),每個(gè)測(cè)點(diǎn)測(cè)試3次并取平均值,分析頻率為2000 Hz,測(cè)試時(shí)間為182.4 s,測(cè)得第1、2階固有頻率分別為234.4、660.5 Hz。相應(yīng)的模態(tài)振型如圖6所示。圖中黑線為初始模型,藍(lán)線為模態(tài)振型。
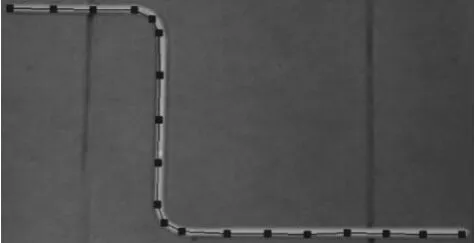
圖5 彎管測(cè)點(diǎn)布置
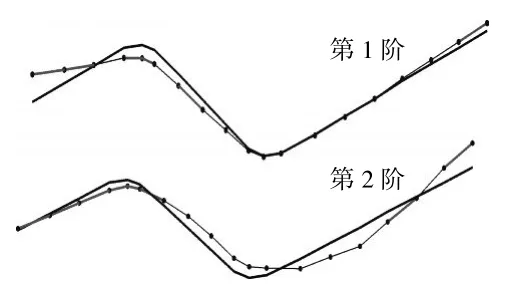
圖6 彎管前2階模態(tài)振型
2.2 CSLDV測(cè)試
設(shè)置激光曲線激光連續(xù)掃描測(cè)試距離為1879.3 mm,測(cè)試時(shí)間為2 s,采樣率為8192 Hz,通過測(cè)試軟件在實(shí)際管路相應(yīng)位置上選取10個(gè)標(biāo)定點(diǎn),根據(jù)坐標(biāo)變換算法計(jì)算鏡片掃描電壓,使激光點(diǎn)以正弦速度在結(jié)構(gòu)表面做往返運(yùn)動(dòng),同時(shí),采集掃描路徑上的振動(dòng)信息。采用力錘激勵(lì)方法對(duì)彎曲管路實(shí)施激勵(lì),此時(shí)激光連續(xù)掃描采集的彎曲管路振動(dòng)速度信號(hào)是掃描路徑上的工作變形和掃描頻率調(diào)制的振動(dòng)響應(yīng)信號(hào),如圖7所示,對(duì)其時(shí)域信號(hào)進(jìn)行解調(diào)得到的頻譜如圖8所示。
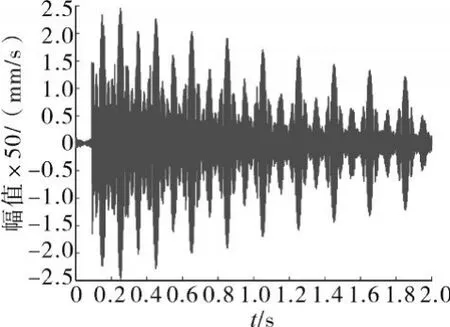
圖7 彎管連續(xù)掃描測(cè)試時(shí)域信號(hào)
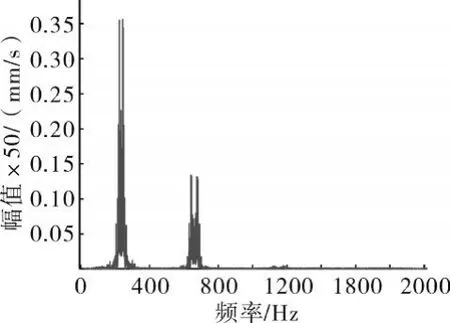
圖8 彎管連續(xù)掃描測(cè)試頻譜
彎曲連續(xù)掃描測(cè)試的頻譜特征是以每階固有頻率為中心、掃描頻率為譜線之間的間隔形成的一系列邊帶譜組成,固有頻率即為中心譜線處的頻率。將圖8測(cè)試得到的彎管前2階振動(dòng)頻率及其對(duì)應(yīng)的邊帶譜進(jìn)一步分別用如圖9、10所示。
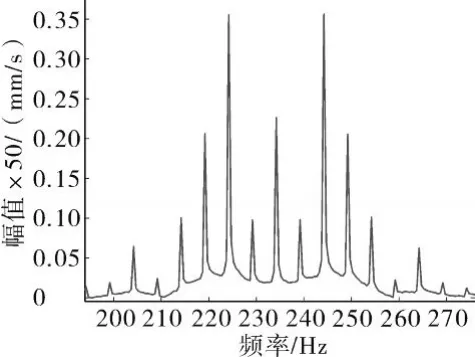
圖9 彎管連續(xù)掃描測(cè)試第1階邊帶譜
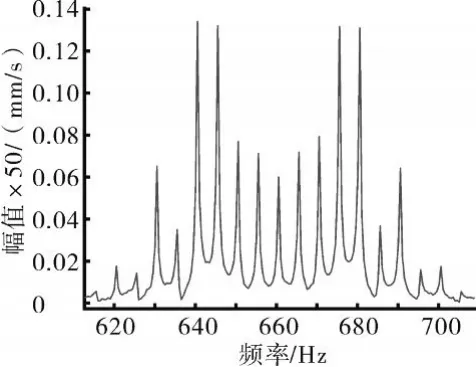
圖10 彎管連續(xù)掃描測(cè)試第2階邊帶譜
使用文獻(xiàn)[13]中提出的方法對(duì)邊帶譜進(jìn)行解調(diào)獲取多項(xiàng)式系數(shù)并擬合成對(duì)應(yīng)的歸一化坐標(biāo)下的振型,最后經(jīng)坐標(biāo)變換就可獲取實(shí)際坐標(biāo)下結(jié)構(gòu)的振型。
2.3 結(jié)果對(duì)比
彎管連續(xù)掃描工作變形分析是在歸一化坐標(biāo)內(nèi)進(jìn)行的,參考圖4的歸一化坐標(biāo),設(shè)置[-1,1]內(nèi)均勻分布50個(gè)測(cè)點(diǎn)進(jìn)行解調(diào)分析。彎管的第1、2階模態(tài)在歸一化坐標(biāo)的工作變形如圖11所示。
CSLDV與SLDV彎曲管路測(cè)試時(shí)間及測(cè)點(diǎn)分辨率對(duì)比見表1。從表中可見,與SLDV測(cè)試相比,CSLDV測(cè)試時(shí)間短、效率高,且測(cè)點(diǎn)分辨率高,可通過增加信號(hào)解調(diào)時(shí)設(shè)置的測(cè)點(diǎn)提高測(cè)點(diǎn)分辨率。

圖11 彎管第1、2階歸一化工作變形

表1 CSLDV與SLDV測(cè)試時(shí)間及測(cè)點(diǎn)分辨率對(duì)比
從圖4可見,通過坐標(biāo)變換將歸一化工作變形轉(zhuǎn)換到實(shí)際坐標(biāo)下,并與SLDV測(cè)試振型的對(duì)比如圖12所示。圖中黑線為初始模型,藍(lán)線為SLDV測(cè)得振型,紅線為CSLDV測(cè)得振型。
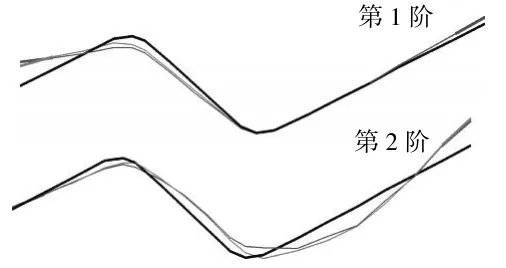
圖12 CSLDV和SLDV測(cè)試振型對(duì)比
CSLDV測(cè)試與SLDC測(cè)試相關(guān)分析見表2。從表中可見,2種測(cè)試方法測(cè)試頻率一致,振型相關(guān)性較高,驗(yàn)證了曲線連續(xù)掃描測(cè)試方法的有效性。
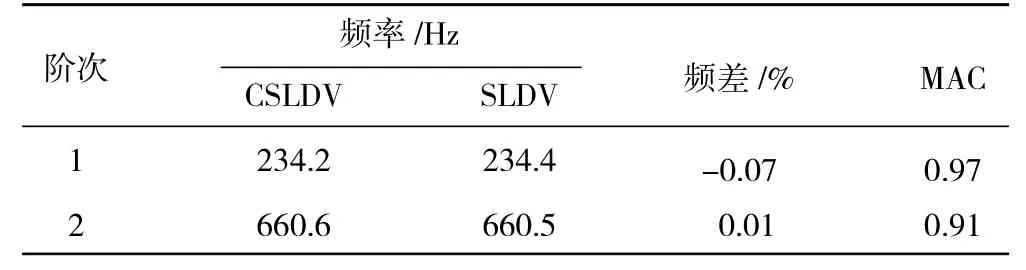
表2 彎管CSLDV測(cè)試與SLDV測(cè)試相關(guān)分析
3 結(jié)束語
本文研究了彎曲管路工作變形激光連續(xù)掃描測(cè)試方法,用多線段逼近曲線,研究了曲線連續(xù)掃描路徑的坐標(biāo)轉(zhuǎn)換方法,并將沖擊激勵(lì)應(yīng)用于彎管的曲線連續(xù)掃描測(cè)試,有效獲得了彎管的前2階工作變形,與SLDV測(cè)試振型具有很高的一致性,驗(yàn)證了激光曲線連續(xù)掃描測(cè)試方法的有效性。本方法具有測(cè)點(diǎn)密集、精度高、測(cè)試效率高的特點(diǎn),是激光連續(xù)掃描測(cè)試工程應(yīng)用的突破。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中華詩詞(2020年1期)2020-09-21 09:24:52
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36