多波束聲吶聲學參數(shù)校準系統(tǒng)設計
2019-09-16 09:27:26韓鴻勝柳義成竇春暉陳允約
水道港口 2019年4期
韓鴻勝,柳義成,竇春暉,陳允約
(交通運輸部天津水運工程科學研究所 國家水運工程檢測設備計量站,天津 300456)
多波束聲吶憑借全覆蓋高效作業(yè)的優(yōu)勢,成為水深精細探測的主要聲吶設備。聲吶設備性能的提高、頻率范圍的擴展和類型的增多對水聲計量提出了許多新的要求,為保證海洋測量數(shù)據(jù)準確度,定期計量其探測性能具有實際的研究與應用價值[1-3]。聲源級、工作頻率、波束寬度和脈沖寬度屬于多波束聲吶基本的聲學參數(shù),與其反向散射強度、距離分辨力、聲照范圍以及測深準確度等性能緊密相關,以上參數(shù)應作為多波束聲吶水聲計量校準的主要指標。
1 校準系統(tǒng)設計
水聲計量測試既要用到機械裝置和電測量裝置,又要涉及到水介質(zhì)中聲場,其量值不確定度要遠大于單純的幾何、電磁、光學測量。目前,聲壓幅值的測量準確度只有±0.5~±3.0 dB[4]。為此,在建設水聲設備校準系統(tǒng)時,必須要做到以下幾點:(1)均勻各向同性且無邊界影響的自由場條件;(2)發(fā)射器與水聽器之間距離適當,既要滿足測試對象的遠場條件,又要保證高信噪比;(3)要有一套高準確度等級的計量標準器,用來采集、顯示和記錄測試中換能器產(chǎn)生的電聲信號;(4)要有能精確控制測量距離、方位角等參數(shù)的位移機構和回轉/升降裝置;(5)整套校準系統(tǒng)量值傳遞與溯源路線科學可行。
1.1 消聲水池
消聲水池是開展水聲計量校準的基礎設施。JJF 1146-2006《消聲水池聲學特性校準規(guī)范》對消聲水池的計量特性提出了具體要求,包括自由場區(qū)域、自由場頻率范圍、水池界面聲壓反射因數(shù)和水池內(nèi)本底噪聲[5]。
1.2 多維運行控制裝置
多維運行控制裝置架于消聲水池之上,可實現(xiàn)精密回轉、升降、水平位移等功能,是水聲計量實驗的主體執(zhí)行機構。多維運行控制裝置(圖1)可安裝多波束聲吶換能器和標準水聽器,并且可以精確控制二者之間的角度和距離,用于聲學指標校準。角度控制最大允許誤差±0.05°,位移控制最大允許誤差為±0.1 cm。
1.3 計量標準器具
計量標準是指準確度低于計量基準,用于檢定或校準其他計量標準或工作計量器具的測量標準。本校準系統(tǒng)應用的主要計量標準器具及配套設備技術要求如表1。

圖1 消聲水池上多維運行控制裝置及其配套設備組成圖Fig.1 Diagram of multi-dimensional operation control device and auxiliary equipments on anechoic tank

試驗設備技術要求要求依據(jù)標準水聽器頻率范圍0.1 MHz~2.5 MHz,擴展不確定度U=0.9 dB(k=2)JJG1017-2007《1 kHz~1 MHz標準水聽器》[6]。信號采集器最高采樣頻率為10 MSa/s,電壓測量不確定度1 mV。JJF 1048-1995《數(shù)據(jù)采集系統(tǒng)校準規(guī)范》[7]。傾角儀最大允許誤差±0.1°JJF(浙) 1057-2010《數(shù)顯傾角儀校準規(guī)范》[8]。

圖2 垂直航跡線方向換能器陣列Fig.2 Transducer array in cross-track direction
2 校準方法
2.1 聲源級
水聲換能器的聲源級是發(fā)射換能器的一個重要電聲參數(shù)。一個聲吶換能器聲輻射的聲源級定義為:在其聲軸方向上,距發(fā)射器等效聲中心1 m遠處的表觀聲壓對應的平面行波的聲強級,以SL表示,即
SL=20lges+20lgd-20lgMs+120
(1)
式中:es為標準水聽器端輸出開路電壓,V;d為測試距離,m;Ms為標準水聽器自由場電壓靈敏度,V/Pa。圖2為多波束聲吶聲軸方向示意圖。
2.2 工作頻率
在一定的海洋因素條件下,海水吸收造成的衰減與頻率緊密相關。頻率越高,衰減越大,當頻率高于10 kHz時,衰減因子對聲強的影響變成一個主要因素,因此海洋中的聲吶測量技術必須顧及頻率的影響[9]。頻率測量方法通常分為計數(shù)法和測頻法。
計數(shù)法的基本思想是將一段頻率為f0的待測信號加載到數(shù)據(jù)采集模塊的采集通道,尋找出所采集信號中包含的整周期個數(shù)N,以及N個周期中包含的數(shù)據(jù)點個數(shù)n,根據(jù)采集通道的采樣率v,該信號頻率的測量值為
(2)
該方法特點是對采樣速率要求較高,對波形、振幅等無過高要求,是目前應用較為廣泛的數(shù)字化信號頻率測量方法。直接測頻法是根據(jù)頻率的定義進行測量的一種方法。它是用電子計數(shù)器顯示單位時間Ts內(nèi)通過被測信號的周期個數(shù)來實現(xiàn)頻率測量或者測量一個周期信號的歷時T0求倒數(shù)來計算頻率。這種方法對時間基準的準確度和計數(shù)器計數(shù)的準確度要求較高。
2.3 波束寬度
波束寬度是指指向性圖的主瓣或主波束兩側的兩個方向之間的夾角,此兩方向上的聲壓級相對于軸向聲壓級下降3分貝的聲級,就稱之為“下降3分貝的波束寬度”,通常記作2θ-3 dB。指向性圖其實是一個三維空間圖,直觀地表示了換能器發(fā)射聲能在聲軸方向上的聚集程度。指向性圖一般需要做歸一化處理,即將聲軸上發(fā)送響應值定為0 dB,因此在歸一化的指向性圖上,聲軸方向值最大,其他任意方向均為負分貝值[10]。波束寬度指向性圖案可用直角坐標系或者極坐標系表示,直角坐標系分辨力較高,極坐標系則形象直觀(圖3)。

圖3 直角坐標表示指向性圖案Fig.3 Directivity pattern in rectangular coordinates
通常,波束寬度校準方法是:將發(fā)射換能器與接收水聽器處于水下同一深度并滿足遠場距離,通過水平旋轉發(fā)射換能器,得到水平面內(nèi)不同角度所對應的水聽器開路電壓,繪制換能器水平指向性圖案;通過垂直旋轉發(fā)射換能器,得到垂直面內(nèi)不同角度所對應的水聽器開路電壓,繪制垂直指向性圖案。多波束聲吶具有較寬的水平開角和較窄的垂直波束角。窄波束角校準對校準裝置要求較高,假設校準多波束聲吶0.5°的波束角,校準裝置角度控制的不確定度宜小于被檢設備標稱值的1/3~1/5,角度控制的機械設計與加工難度較大。相比而言,在機械裝置開發(fā)中,距離控制準確度要比角度控制高,且二者距離越遠,改變距離引起的角度變化分辨力越大。針對這一難題,提出窄波束角的相對校準方法,即保持發(fā)射換能器靜止,通過升降標準水聽器達到二者相對角度位置變化的校準目的。
2.4 脈沖寬度
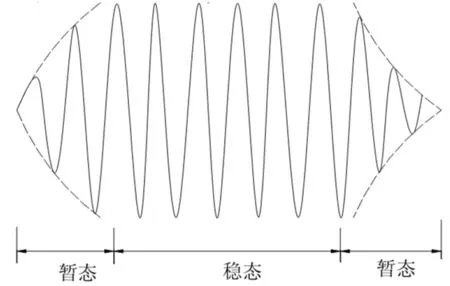
圖4 典型正弦脈沖波形Fig.4 Typical sinusoidal waveform
脈寬影響多波束聲吶距離分辨力,是保障水下微地貌測量和小目標探測性能的主要參數(shù),脈沖越窄,分辨力越高。多波束聲吶的脈沖寬度在一定范圍內(nèi)是可調(diào)的,以適應不同的測量需求與環(huán)境。當換能器發(fā)射功率一定,窄脈沖的能量受到限制,損失探測距離;采用長脈沖可提高發(fā)射能量,達到增加探測距離的目的,但卻損失了距離分辨力。以上技術矛盾,促使FM信號、編碼脈沖信號等復雜信號技術的引入,提升了多波束聲吶的性能。
脈寬校準方法比較簡單,通過標準水聽器與信號采集器獲得脈沖聲信號,模數(shù)轉換之后,截取脈寬內(nèi)的穩(wěn)態(tài)部分(圖4),獲得脈沖信號的持續(xù)時間,即為實測脈沖寬度,與多波束聲吶標稱脈寬比較得到校準值。
3 試驗與分析
3.1 聲學指標試驗流程
實驗流程描述如下:
(1)待測換能器經(jīng)轉接法蘭盤安裝到多維運行控制機構的支架底端,使其發(fā)射扇面與水面平行,調(diào)節(jié)聲吶設備的工作參數(shù)(頻率、功率、脈寬、增益、門限等),使其正常、穩(wěn)定發(fā)射脈沖信號。
(2)標準水聽器與信號采集器連接。當脈沖信號進入水聽器,信號采集器實時記錄水聽器端的開路電壓幅值。
(3)豎直方向測試(圖5)。調(diào)節(jié)水聽器至最低端,使待測換能器大致對準水聽器方向并發(fā)射一定脈寬的聲波信號。換能器穩(wěn)定不動,以△d=1 cm的間隔提升水聽器支架,同時記錄該點位置處水聽器的開路電壓值,在移動水聽器過程中會出現(xiàn)一個電壓峰值,該峰值位置點即為多波束聲吶發(fā)射波束聲軸所在水平面。由測試距離r為8 m可計算,角度變化量為
(3)
(4)水平方向測試(圖6)。找到聲軸所在水平面后,固定水聽器。此時,通過精密回轉裝置在水平面內(nèi)轉動待測換能器,控制伺服電機以0.1°的角度間隔轉動換能器,旋轉一周后,每個角度位置處都可采集到水聽器端的一個開路電壓值,繪出發(fā)射指向性圖。在轉動換能器過程中,找到電壓最大值所在位置即為換能器的聲軸方向。至此,找到了聲軸方向,采集此刻水聽器接收到的脈沖信號。
(5)信號經(jīng)濾波處理后,計算脈沖穩(wěn)態(tài)部分的開路電壓有效值,根據(jù)標準水聽器靈敏度與頻率的關系曲線圖可查得各個檢測頻率范圍所對應的電壓靈敏度。結合標準水聽器的電壓靈敏度M,便可計算各個位置處的自由場聲壓。進行聲源級、工作頻率、波束寬度、脈沖寬度等性能參數(shù)的分析與計算。


圖5 窄波束角校準原理示意圖Fig.5 Calibration schematic diagram of the narrow beam angle圖6 寬波束角校準原理示意圖Fig.6 Calibration schematic diagram of the wide beam angle
3.2 測試結果分析
表2為iBeam8120多波束聲吶水聲實驗測試結果。該型號多波束工作頻率為200 kHz。波束角為1.5°×1.5°,波束扇形最大開角160°。需要說明的是:第一個1.5°是指多波束聲吶沿航跡線方向的發(fā)射指向性;第二個1.5°是指垂直航跡線方向的接收指向性;160°是指垂直航跡線方向的發(fā)射指向性。對于接收指向性的測量,實驗采用的方法是:將水聽器替換為標準聲源或目標小球,控制旋轉裝置以0.1°的步進值水平方向旋轉多波束聲吶換能器,多波束聲吶接收不同角度位置處標準聲源或小鋼球的發(fā)射或反射信號,采集多波束聲吶換能器端的開路電壓或通過解析多波束XTF數(shù)據(jù)可得每個角度處的反向散射強度值 ,據(jù)此擬合繪出多波束接收波束角。
圖7為多波束聲吶垂直航跡線方向的發(fā)射指向性圖,對于沿航跡線方向的發(fā)射指向性,試驗進行了扇區(qū)-60°,0°,60°三個角度位置處的測試,如圖8所示。對于接收指向性,對多波束聲吶中央128號波束進行了檢測,如圖9所示。
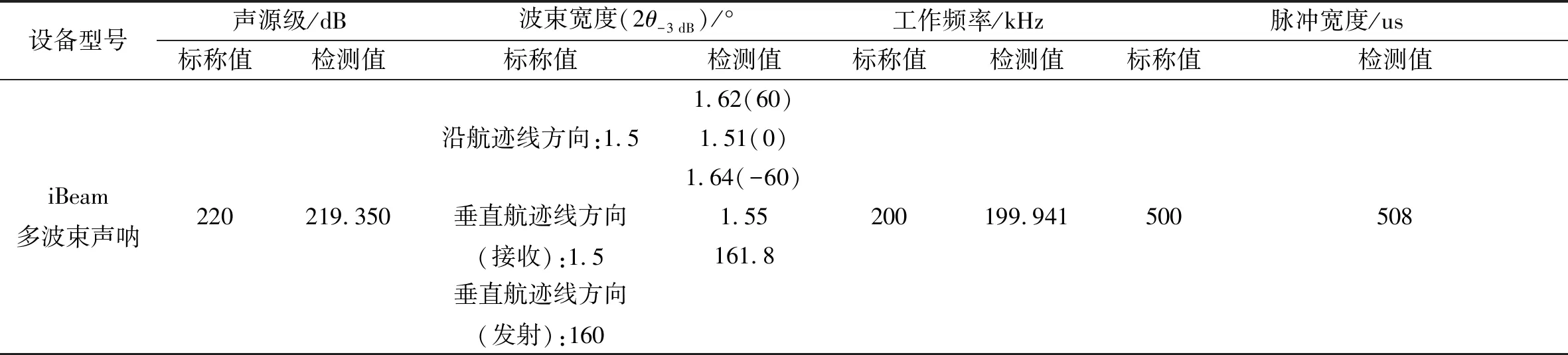
表2 多波束聲吶聲學指標測試數(shù)據(jù)Tab.2 Acoustic indexes test data of multi-beam sonar
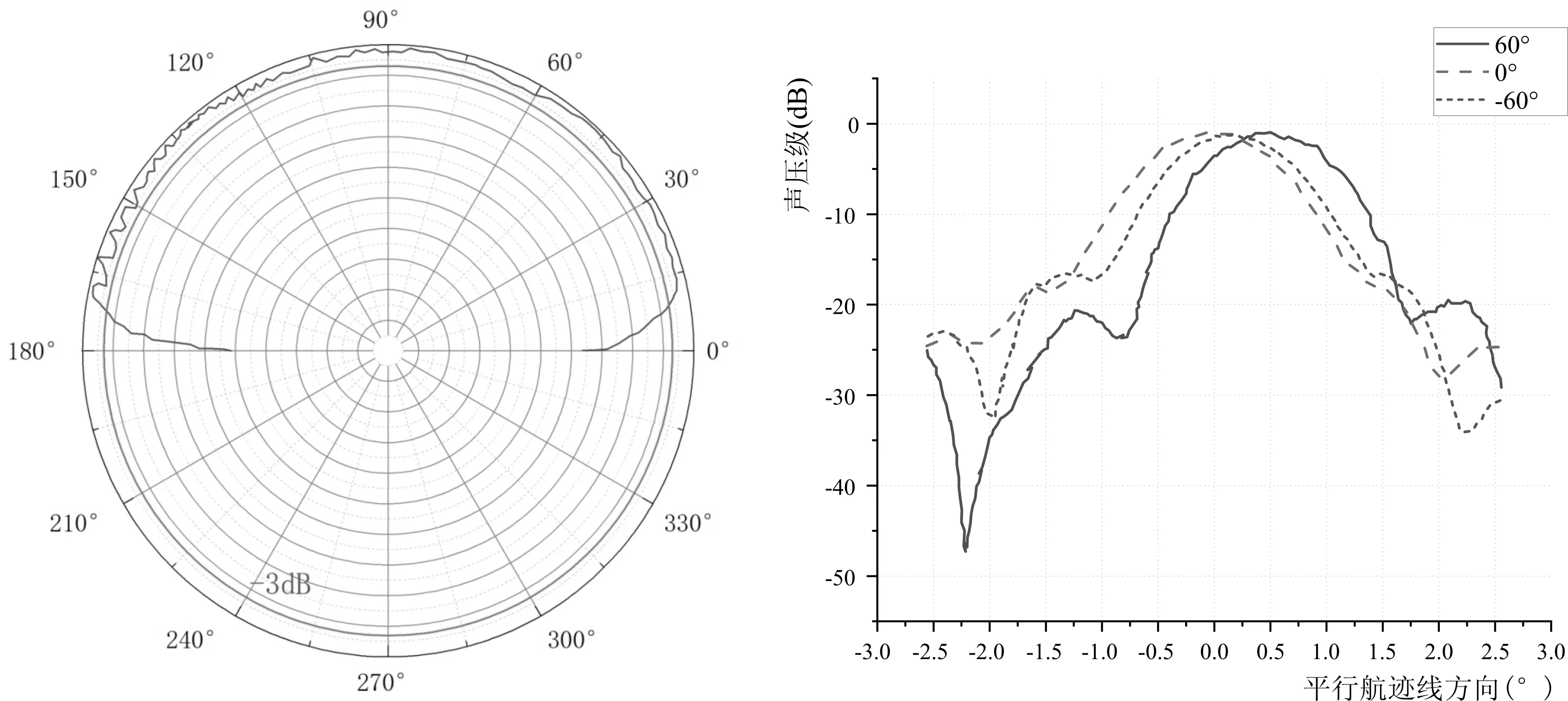

圖7 垂直航跡線方向發(fā)射指向性圖Fig.7 Transmitting directivity pattern in cross-track direction圖8 垂直航跡線方向-60°,0°,60°發(fā)射指向性圖Fig.8 Transmitting directivity pattern at -60°,0°,60° in along-track direction

圖9 中央128號波束垂直航跡線方向 的接收指向性圖Fig.9 Receiving directivity pattern of No.128 beam in cross-track direction
4 不確定度評定
4.1 頻率測量不確定度評定
4.1.1 數(shù)學模型
工作頻率測量的偏差通過多波束聲吶標稱的工作頻率值減去信號采集與分析系統(tǒng)(標準水聽器、信號采集器)測得的頻率值,其數(shù)學模型如下
δf=fb-fs
(4)
式中:δf為工作頻率測量偏差,Hz;fb為多波束聲吶標稱頻率值,Hz;fs為信號采集與分析系統(tǒng)測得的頻率值,Hz。
4.1.2 測量不確定度來源
多波束聲吶工作頻率的測量不確定度的主要來源及數(shù)據(jù)如表3所示。對多波束聲吶在200 kHz 工作頻率下,通過標準水聽器和信號采集器,連續(xù)采集10個脈沖信號,得到測量數(shù)據(jù)(Hz):199 926,199 932,199 993,199 938,199 917,199 986,199 904,199 925,199 961,199 929。
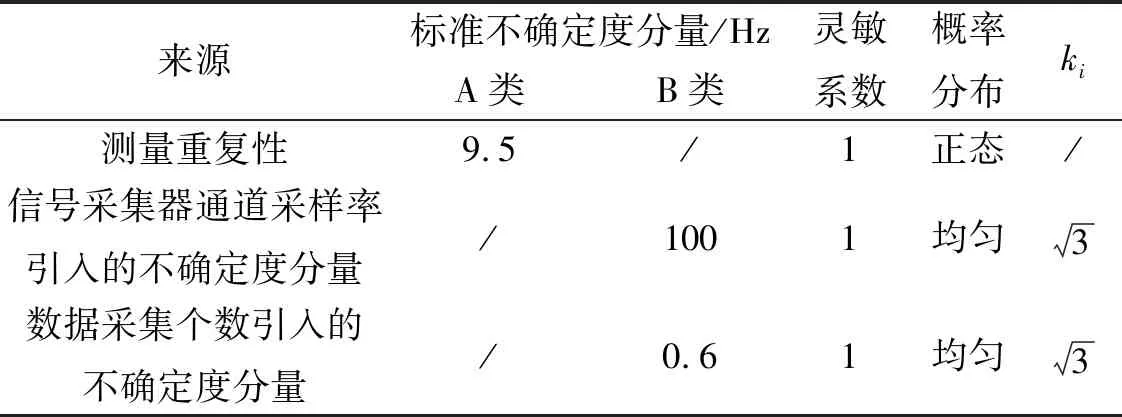
表3 工作頻率測量不確定度分量綜合分析表Tab.3 Comprehensive analysis for the components of frequency uncertainty
4.1.3 合成不確定度
根據(jù)不確定度的傳播率,將上述不確定度分量進行合成,則
(5)
4.1.4 擴展不確定度
取包含因子k=2,則
U=2μc=201 Hz,k=2
(6)
4.2 波束寬度測量不確定度評定
4.2.1 數(shù)學模型
波束寬度測量的偏差通過多波束聲吶標稱的波束寬度減去多波束聲吶計量檢定裝置測得的波束寬度獲得,其數(shù)學模型如下
δθ=θb-θs
(7)
式中:δθ為波束寬度測量偏差,(°);θb為多波束聲吶標稱波束寬度,(°);θs為水聲計量標準裝置測得的波束寬度,(°)。
4.2.2 測量不確定度來源
多波束聲吶波束寬度的測量不確定度的主要來源及數(shù)據(jù)如表4及表5所示。通過精密回轉升降機構調(diào)節(jié)多波束聲吶換能器與標準水聽器之間的角度位置關系,連續(xù)采集多波束聲吶沿航跡線方向和垂直航跡線方向各個角度位置處的聲壓值,取下降3 dB的角度位置點,獲得波束寬度。得到測量數(shù)據(jù)(°)如下
沿航跡線方向:1.19,1.18,1.19,1.19,1.19,1.20,1.18,1.19,1.17,1.20。
垂直航跡線方向:51.32,51.36,51.28,51.29,51.34,51.35,51.31,51.26,51.3,51.33。
4.2.3 合成標準不確定度
根據(jù)不確定度的傳播率,將上述不確定度分量進行合成,則
(8)
4.2.4 擴展不確定度
取包含因子k=2,則
U=2μc=0.045°
(9)
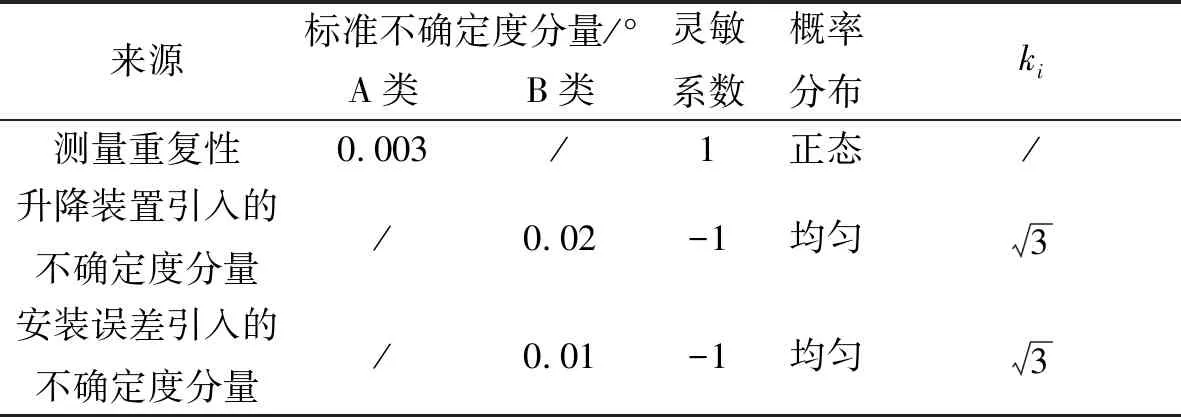
表4 沿航跡線方向波束寬度測量不確定度分量綜合分析表Tab.4 Comprehensive analysis for the components of along-track beam width uncertainty
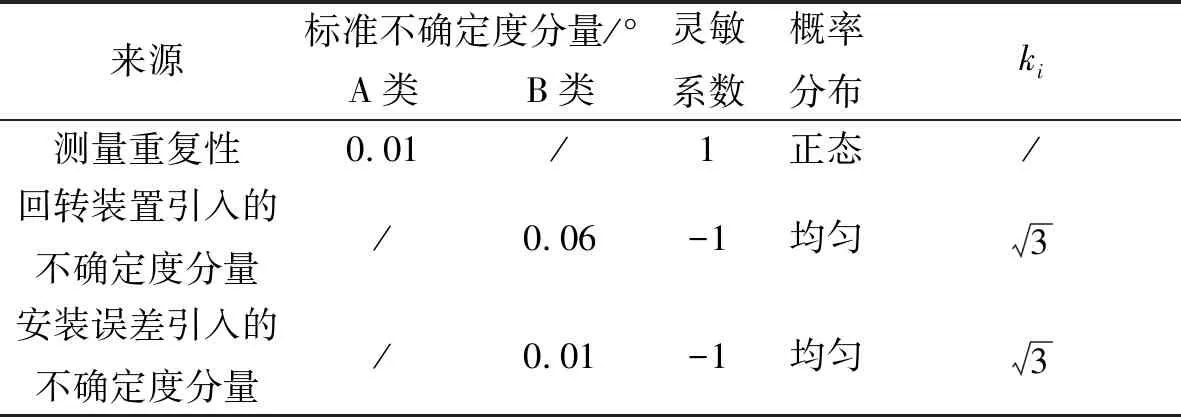
表5 垂直航跡線方向波束寬度測量不確定度分量綜合分析表Tab.5 Comprehensive analysis for the components of cross-track beam width uncertainty
合成標準不確定度為
(10)
擴展不確定度
U=2μc=0.13°
(11)
5 結語
多波束聲吶計量校準的核心是用計量標準對測量儀器的計量性能進行評估,以獲得儀器量值的溯源性與一致性,以保證其測量的準確可靠。
(1)多波束聲吶聲學參數(shù)計量校準系統(tǒng)依據(jù)交通運輸部部門計量檢定規(guī)程JJG(交通)139-2017《多波束測深儀 淺水》的要求而設計,可實現(xiàn)多波束聲吶聲源級、波束寬度、工作頻率和脈沖寬度等參數(shù)的計量校準,各校準參數(shù)的測量不確定度滿足規(guī)程要求。
(2)選取國內(nèi)新型多波束聲吶設備進行校準試驗,試驗結果優(yōu)于JJG(交通)139-2017《多波束測深儀 淺水》聲源級最大允許誤差±3.0 dB,扇區(qū)開角最大允許誤差±10°,波束角最大允許誤差±0.25°的要求,驗證了本校準系統(tǒng)的可行性。
(3)進一步開發(fā)校準系統(tǒng)的自動化功能。完善校準系統(tǒng)中多維運行控制裝置的自動化回轉、升降和定位功能,改進水聲信號自動化同步采集與濾波處理,實現(xiàn)指向性圖自動化繪制。
(4)下一步進行校準系統(tǒng)的穩(wěn)定性和重復性試驗,依據(jù)JJF1033-2016《計量標準考核規(guī)范》,進行計量標準建設。
(5)擴展校準系統(tǒng)的適用范圍,可開展側掃聲吶、淺地層剖面儀、ADCP等海洋聲吶測量儀器的計量校準工作。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00