水下多智能體群協調控制仿真分析
2012-12-02 06:06:54張衛東佘瑩瑩唐正茂
艦船科學技術 2012年8期
張衛東,佘瑩瑩,唐正茂
(1.海軍駐葫蘆島431 廠軍事代表室,遼寧 葫蘆島125004;2.武漢第二船舶設計研究所,湖北 武漢430064)
0 引 言
隨著應用的需要和技術的發展,多智能體系統的協調控制在世界范圍內掀起了研究熱潮。作為多智能體系統協調控制中的研究熱點,一致性問題主要是基于多智能體系統中的智能體相互之間的信息交換,通過設計一致性協議使得所有智能體的狀態達到某同一值。文獻[1-6]對該問題做了大量的研究。
由于海底環境的復雜多變和無法預知,很多工作都不適合潛水員以及載人潛水器進行。作為海洋資源開發工具,水下智能體(AUV)成為當今各國在海洋工程領域中的研究熱點。這主要是由于在實際的水下作業中,AUV 可以自主地運行在遠程的、難于接近的、無法預知的或危險的海洋環境中,完成自主導航、自主避障和自主作業等任務。
本文主要研究在AUV 群按照給定規律運動時的穩定性問題。由于大多數一致性問題的研究都是假設最終達到的一致性值是固定不變的常數。在AUV群的運動控制中,要求系統在水中以規定的隊列沿著指定的運動方式前行,此時,一致性問題的最終一致性值應隨時間而動態變化。這里基于一致性理論的思想,在具有通信約束的情況下,對每個AUV設計1 個分布式控制器,使它們能按照給定的隊列進行運動。
1 AUV 運動模型
在一般情況下,AUV 在水中的運動可看作剛體在流體中的空間運動。當AUV 在運動中的航向不變,僅改變深度時,其重心始終保持在同一鉛垂平面內;在航向改變,深度不變時,AUV 的重心始終保持在同一水平面內。針對AUV 的運動模型(忽略橫滾面的運動),將AUV 在水中的空間運動進行近似處理,分解為水平面運動和垂直面運動。當AUVi以Vi的航速運動時:
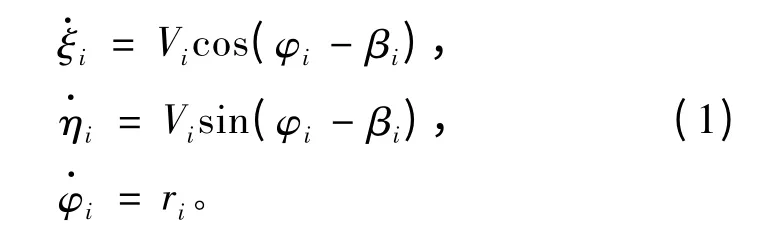
對于其平面運動,用(ξi,ηi),φi,βi,ri分別表示其重心的坐標、首向角、水動力角(漂角)及回轉運動的角速度。可以得到:
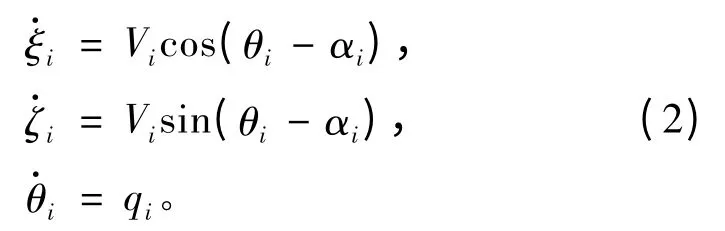
對于其垂直面運動,用(ξi,ζi),θi,αi,qi分別為其重心的坐標、姿態角、水動力角(沖角)及縱傾運動的角速度。可以得到:
通常情況下,平面運動可以體現AUV 運動的基本特征——深度和航向的控制,而且空間運動的水動力特性也是在平面運動的基礎上發展起來的。在本章中,主要研究AUV 平面運動的控制。要求AUV群的平面航速為v0,回轉運動的角速度為r0,垂直速度為vζ0,根據式(1)和式(2)可以得到第i 個AUV 的動態模型為:
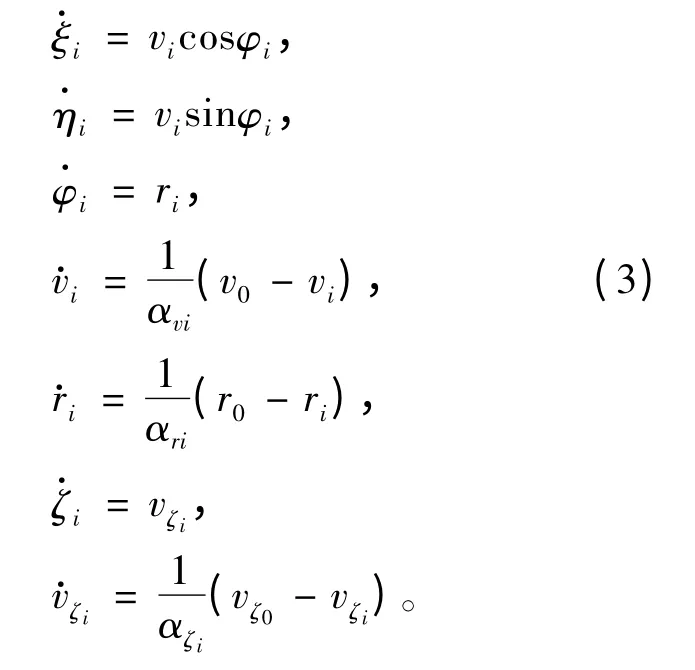
式中參數α*為正參數。用(ξfi,ηfi)表示AUVi 上與重心(ξi,ηi)相距di的點fi的位置。此時,在對AUV的協調控制中,可用(ξfi,ηfi)替代(ξi,ηi),以簡化協調控制算法的設計。
當系統要求的參數滿足
通過變換可以得到:
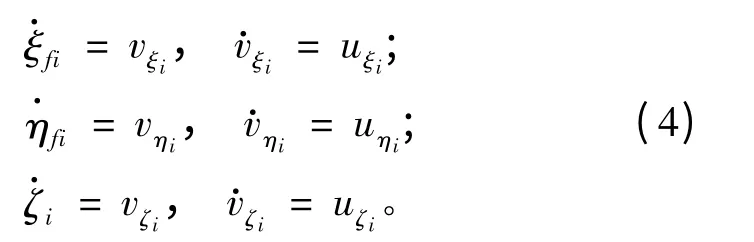
可以看出,通過設計uξi,uηi和uζi的控制算法就能對AUV 群進行協調控制。在對AUV 群運動控制的分析中,假設每個AUV 都具有唯一的與之對應的編號且每個AUV 都知道自身及與其鄰域內的AUV的編號。另外,所有AUV 之間的相互作用都是同步的,即所有AUV 都是在同一時刻更新其狀態參數。
2 具有通信約束的AUV 群運動算法
由于AUV 的通信能力較為有限,特別是在水下通信受到很多約束,這里針對具有通信約束的AUV群設計了一類分布式控制器,當AUV 間的通信時滯在一定范圍內,所有的AUV 仍然能按照期望速度和隊形進行穩定的運動。假設所有AUV 都在給定水深進行運動,即ζi為一給定值。當AUV 間的通信存在時滯時,設計了如下分布式控制器:
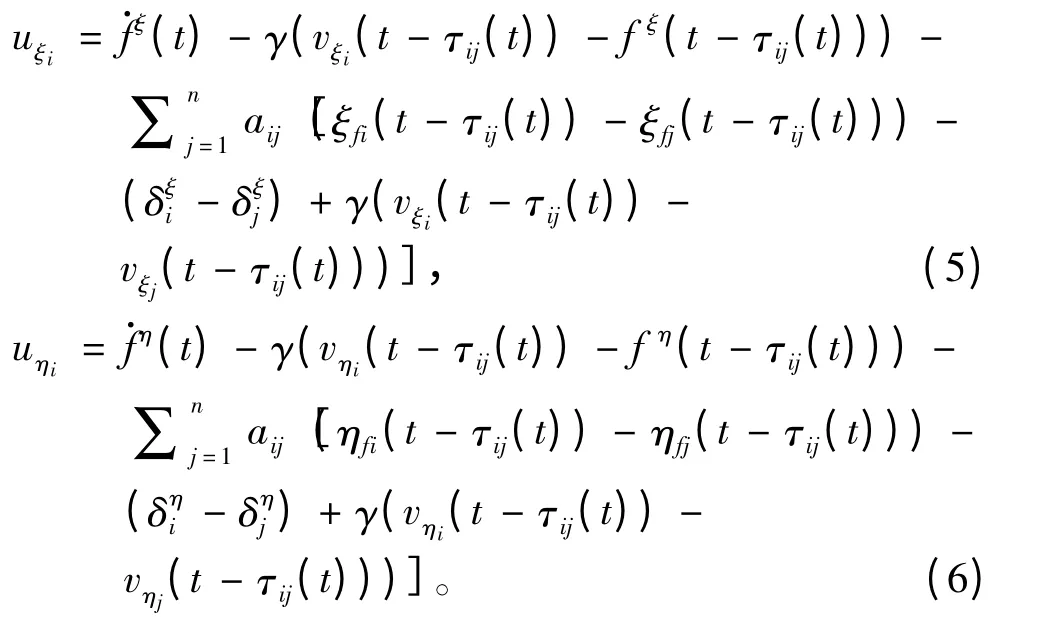
式中:控制增益γ >0,τij(t)為AUVi 和j 之間通信時滯;fξ(t),fη(t)為連續可微的函數,表示AUV 的運動速度特性,并且對所有AUV 來說,其運動速度特性的描述都是一樣的;和為AUVi 在1 個靜態坐標系統中期望隊形中的位置,為一時不變的函數。假設任意2 個不同AUV 之間通信允許1 個共同時滯上界τ0,即0 ≤τij(t)≤τ0。在其個體間的通信時滯τij(t)滿足:

3 仿真分析
假設AUV 群有6 個AUV,其編號分別為1,2,3,4,5,6。其無向連通通信網絡拓撲結構圖如圖1所示,其鄰接權重均為1。
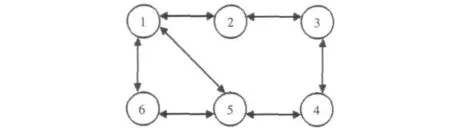
圖1 無向連通網絡拓撲結構圖Fig.1 A undirected connected communication graph
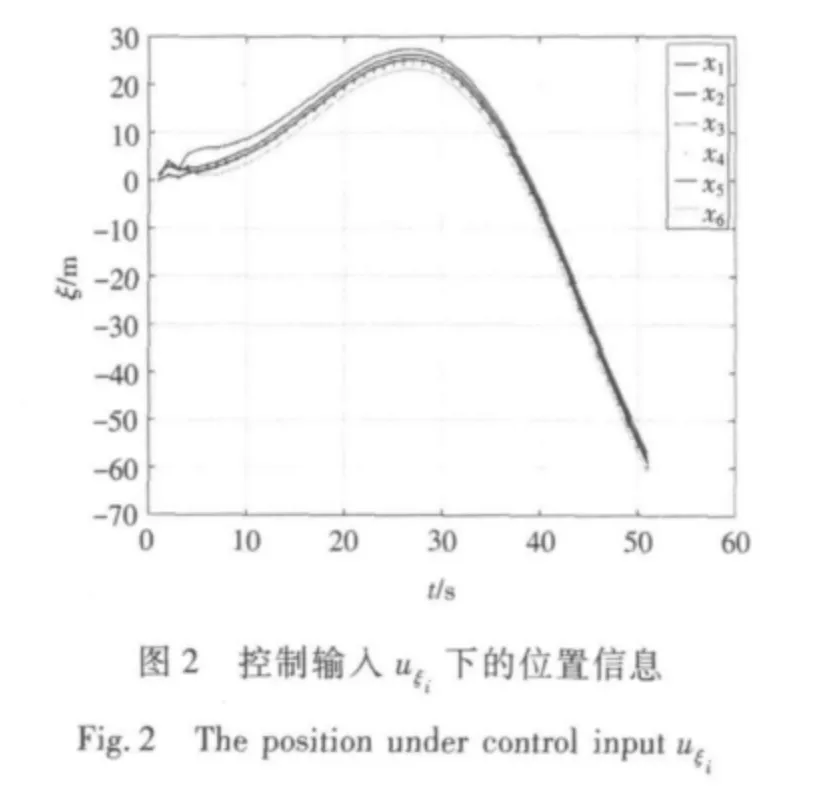
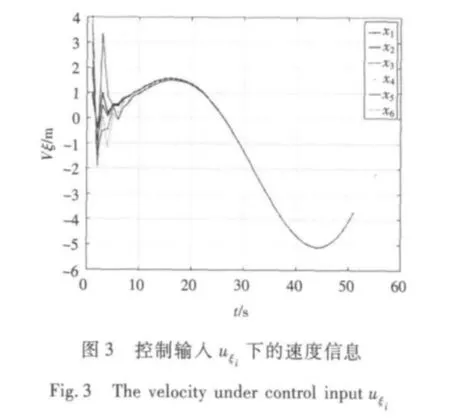
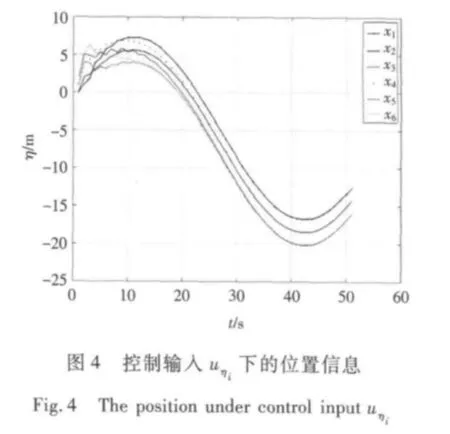
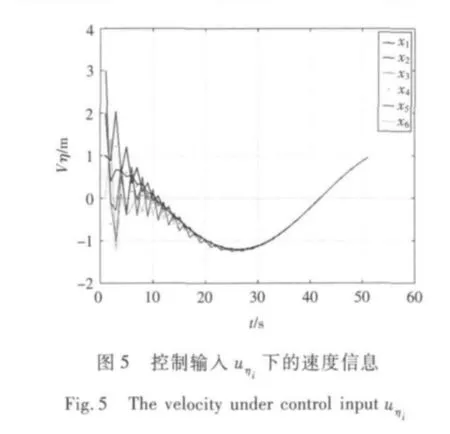
此時圖1 對應的Laplacian 矩陣的特征值分別為:λ1=0,λ2=1,λ3=1.585 8,λ4=3,λ5=4,λ6=4.414 2。當系統的控制輸入uξi和uηi分別為式(5)和式(6)時,根據式(7)可知系統的時滯上界為τmax(t)=0.37。選取γ=1,AUV 之間的時滯為:τ12(t)=τ21(t)=0.1,τ15(t)=τ51(t)=0.2,τ16(t)=τ61(t)=0,τ23(t)=τ32(t)=0.1,τ56(t)=τ65(t)=0,τ34(t)=τ43(t)=0.2,τ45(t)=τ54(t)=0.1。系統初始狀態隨機給定。跟隨AUV 之間的相對位置滿足:δ1。AUV 的運動速度特性為fξ(t)=tsint,fη(t)=cost。圖2 ~圖5 分別給出了系統在控制輸入uξi和uηi下的位置和速度信息。
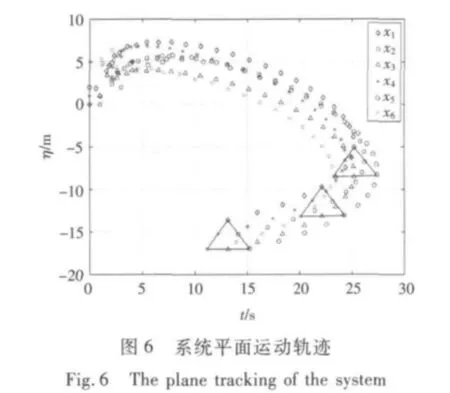
從圖2 和圖4 可以看出,所有個體最終能保持穩定的隊形,圖3 和圖5 顯示了個體之間最終速度能達到一致,圖6 給出了系統平面運動的軌跡。
為了驗證理論結果的正確性,對個體間時滯超出定理1 給出的時滯上界時的仿真結果,此時選取所有的個體間的時滯都為0.4。圖7 給出了τij=0.4 時系統平面運動的軌跡。
對比圖5 和圖7 可以得出,只有在個體間時滯小于式(7)給出的時滯容忍上界時,系統才能形成穩定的編隊。
4 結 語
本文在具有通信約束的情況下,基于局部信息,對每AUV 設計1 個分布式控制器,使AUV 群能很方便地實現隊形控制和群運動控制。給出了一個任意2個AUV 之間進行通信所允許的時滯上界的具體解析表達式,通過計算機數值仿真分析證明了針對AUV群所提出的分布式控制器的有效性。
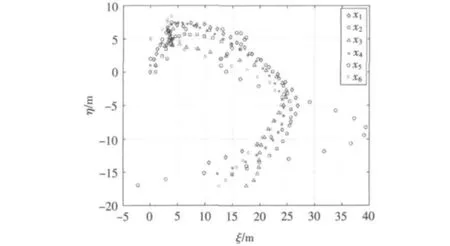
圖7 系統平面運動軌跡τij=0.4Fig.7 The plane tracking of the system under τij=0.4
[1]VICSEK T,CZIROK A,et al.Novel type of phase transitions in a system of self-driven particles[J].Physical Review Letters,1995,75(6):1226-1229.
[2]REN W,et al.Consensus seeking in multi-agent systems under dynamically changing interaction topologies[J].IEEE Trans.on Automatic Control,2005,50(5):655-661.
[3]XIAO L,et al.Fast linear iterations for distributed averaging[J].Systems & Control Letters,2004,53(1):65-78.
[4]LIU C L,TIAN Y P.Coordination of multi-agent systems with communication delays[A].IFAC World Congress[C].Seoul,2008.10782-10787.
[5]XIE G,WANG L.Consensus control for a class of networks of dynamic agents[J].International Journal of Robust and Nonlinear Control,2007,17(10-11):941-959.
[6]TANNER H G,et al.Flocking in fixed and switching networks[J].IEEE Trans.on Automatic Control,2007,52(5):863-868.
[7]施生達.潛艇操縱性[M].北京:國防工業出版社,1995.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32