電驅動差速轉向輪式水陸兩棲車輛可收放懸架機構運動學分析與參數優化
2019-09-11 09:56:40劇冬梅項昌樂陶溢徐小軍王文浩
兵工學報 2019年8期
關鍵詞:優化
劇冬梅, 項昌樂, 陶溢, 徐小軍, 王文浩
(1.北京理工大學 機械與車輛學院, 北京 100081; 2.中國兵器科學研究院, 北京 100089; 3.北京特種車輛研究所, 北京 100072; 4.國防科技大學 智能科學學院, 湖南 長沙 410073)
0 引言
水陸兩棲裝備對海上運輸、海洋開發和軍事活動具有重要意義,其重要的應用價值使得20世紀以來許多國家開展了相關研究。20世紀70年代后,主要軍事強國的陸軍輕型戰斗車輛基本實現了兩棲化[1]。近些年,隨著世界格局的穩定,兩棲車輛技術開始逐漸向民用領域拓展,主要應用于搶險救災和極限運動[2]。目前典型兩棲車輛有美軍EFV履帶式兩棲突擊車、俄羅斯BTR-80和BTR-90系列輪式兩棲步兵戰車、俄羅斯“野牛”氣墊船、英國Aquada輪式兩棲車等[3-4]。
限制水陸兩棲裝備水面速度的一大因素就是車體航行阻力[5]。兩棲裝備水中行駛時,車輪部分將產生大量渦流損失,所產生的阻力約占總阻力的25%. 為減少水陸車輛在水中的行駛阻力,需針對水陸兩棲裝備設計一種可收放懸架系統,在陸上行駛時,這種可收放懸架系統發揮普通懸架的作用,傳遞作用在行走機構與車體間的力和力矩,緩和車輛行駛時傳到車體的沖擊力,并減少車體振動。當兩棲車進入水中時,可收放懸架系統又能將行走機構整體收起,通過減少行走機構的渦流損失以實現減阻增速,提高其推進效率。
英國Gibbs公司的高速兩棲汽車(HSA)采用了一種可收放懸架,該車陸上時速達160 km/h,水上行駛時通過收放懸架將車輪收起,航速可達55 km/h[6],其收放懸架結構已申請了相關專利[7];該可收放懸架結構復雜、占用空間較大,目前只應用于輕型民用車輛,尚未應用在軍事領域。美國于1997年也設計了一種可收放懸架[8],該收放懸架類似于雙橫臂懸架,結構簡單,車輪在提升過程中翻轉角很小,但其收放行程較小,減阻增速效果不明顯。
本文提出了一種新的可收放懸架,并以提高懸架運動特性和收放特性為目標,對行走機構的收放高度、翻轉角度、外傾角以及主銷內傾角等關鍵參數進行優化設計。
1 可收放懸架方案
本文提出的一種輪式兩棲車輛行走機構采用4個輪式行走機構,每個輪式行走機構均安裝了一個輪轂電機,車輛通過差速實現轉向,因此收放懸架不涉及車輪驅動機構和轉向機構。
兩棲車輛懸架系統應該盡量簡單可靠,能夠保證裝備越野行駛時有效地緩和來自顛簸地面的振動[9],水上航行時能夠平穩而迅速地將行走機構完全收起,實現減阻增速。針對現有可收放懸架的不足,將減振效果良好且振動過程中能保持行走機構外傾角變化較小的雙叉骨式懸架與旋轉驅動收放的四連桿機構相結合,設計出一種新型可收放懸架。圖1為采用新型可收放懸架方案的某水陸兩棲車前后視角簡圖,車輛前后、左右對稱布置4個相同的可收放懸架。懸架上橫臂兩端分別與車體和叉骨連桿連接,叉骨連桿與行走機構鉸接,下橫臂一端與行走機構固連,減振器一端鉸接于下橫臂。另有一主動搖臂,起始端與車體鉸接,末端與減振器相連,主動搖臂上方有一與車體固連的限位塊,對搖臂進行限位。主動臂、減振器、下橫臂與車體構成另一個四連桿結構。
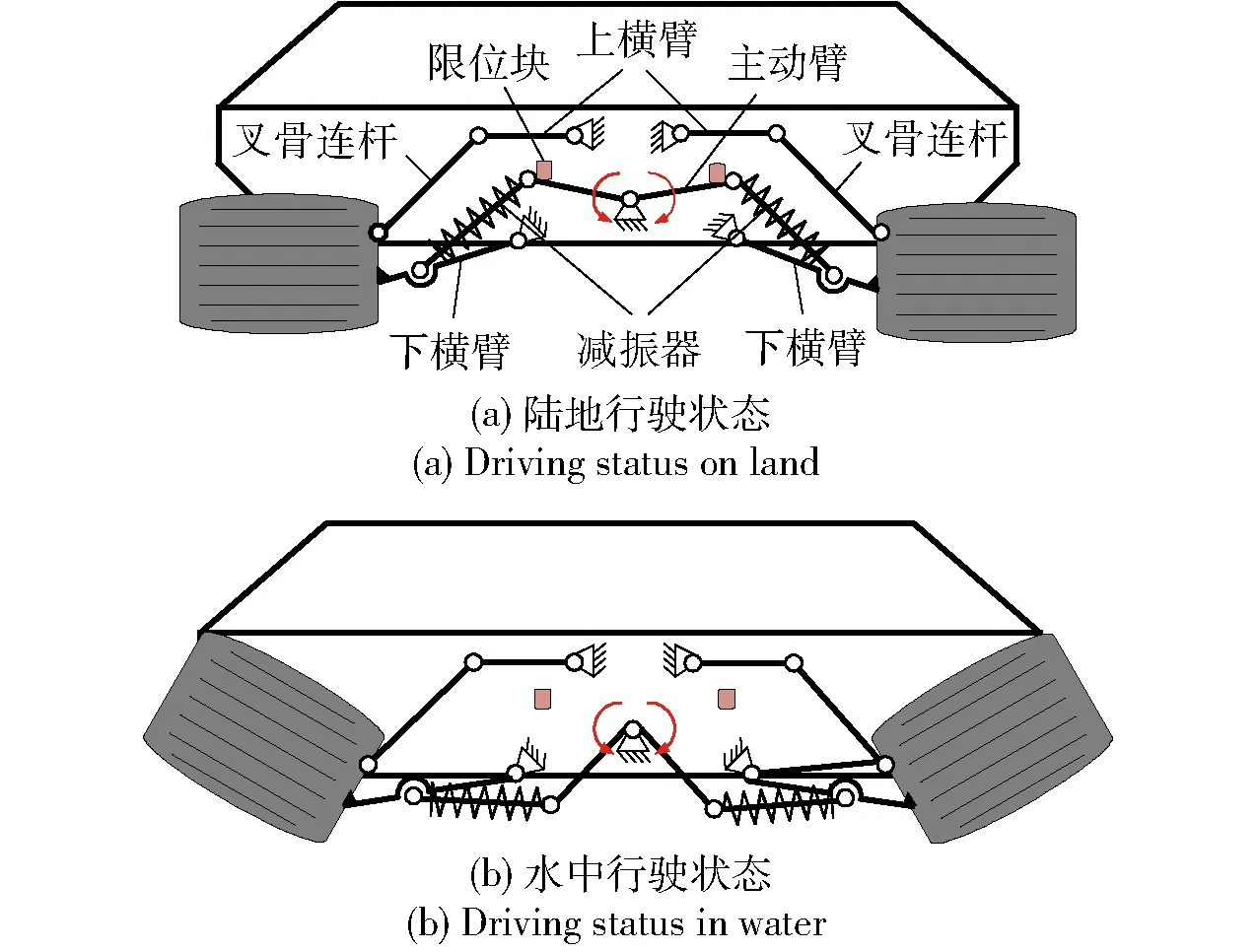
圖1 水陸兩棲車可收放懸架方案Fig.1 Front and rear views of retractable suspension schemes of amphibious vehicle
在陸地行駛時,限位塊限制主動臂向上轉動,與主動臂連接的減振器上端則可視為與車體鉸接。此時收放懸架發揮普通懸架的減振作用。當兩棲車完全駛入水中時,主動臂向地面一側轉動,而減振器發揮連桿作用,當越過極位后帶動下橫臂向車體上方轉動,實現行走機構的翻轉和提升。本文懸架的優點在于采用了經典四連桿機構加限位的方法,可同時實現行走機構的提升與翻轉,結構簡單可靠,減振器在陸上行進發揮減振作用,在收放過程中充當連桿,實現了構件的一體多用。此外,收放機構采用了旋轉驅動,相比直線驅動節約了豎直方向上的空間。
2 運動學分析
圖2為車輛右后側可收放懸架結構簡圖,其中:A為主動臂與車體的鉸鏈點,B為主動臂與減振器的鉸鏈點,C為下橫臂與行走機構的固連點,D為下橫臂與車體的鉸鏈點,E為叉骨連桿與上橫臂的鉸鏈點,F為上橫臂與車體的鉸鏈點,G為行走機構中心,l1、l2、l3、l4、l5、l6分別表示車體上鉸鏈點A與鉸鏈點D間的距離、主動臂長度、減振器長度、下橫臂長度、叉骨連桿長度和上橫臂長度,l7表示鉸鏈點F與鉸鏈點D之間的距離;θ1表示鉸鏈點A與鉸鏈點D的連線AD與x軸的夾角,θ2表示主動臂與x軸的夾角,θ3表示減振器與x軸的夾角,θ4表示下橫臂與x軸的夾角,θ5表示叉骨連桿與x軸的夾角,θ6表示上橫臂與x軸的夾角。減振器、下橫臂和叉骨連桿并未鉸接于同一點,且行走機構與叉骨連桿固連時,構成典型雙叉骨式懸架。
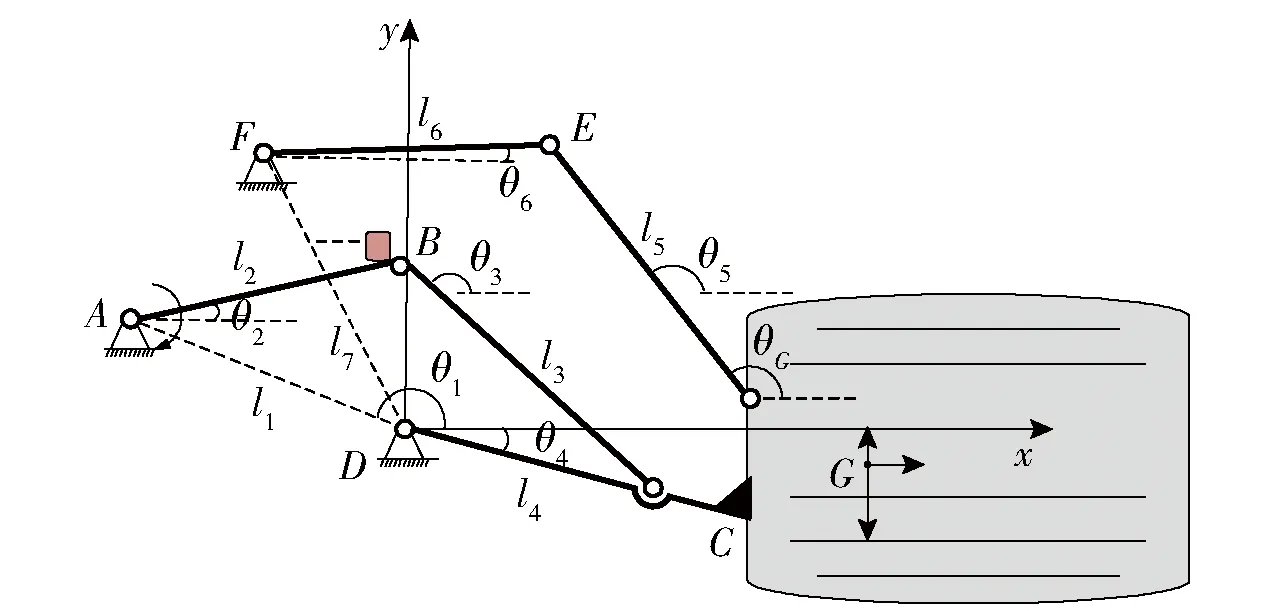
圖2 右后側可收放懸架結構簡圖Fig.2 Schematic diagram of right rear retractable suspension
按圖2所示結構建立坐標系,在坐標系中將構件用矢量表示,并采用閉環矢量法建立機構的位置方程,則有
l1+l4=l2+l3.
(1)
設定各桿件及主動臂轉角θ2已知,θ1為常量。將(1)式分別在x軸和y軸方向投影后,有
(2)
以下橫臂的運動為已知運動,再一次采用閉環矢量法可以研究下橫臂、叉骨連桿、上橫臂及車身部分組成的四連桿中各部件的運動情況:
l4+l7=l5+l6.
(3)
車身部分長度l7及其與水平方向的夾角θ7已知。從(2)式、(3)式可以看出,通過行走機構在提升過程中,其質心的橫坐標、縱坐標以及其相對于車身的旋轉角度3個參量就可以完全表征該行走機構的運動。由于叉骨連桿和行走機構固連,為了由叉骨連桿的運動參數直接得到行走機構的參數,需要進一步分析。
圖3為收放過程中行走機構的運動示意圖,其中:ΔyG和ΔθG分別表示行走機構中心G的縱坐標的變化量和相對初始位置的旋轉角度,即行走機構在收放過程中的提升高度和翻轉角度;Δθ5表示叉骨連桿相對自身的旋轉角度。
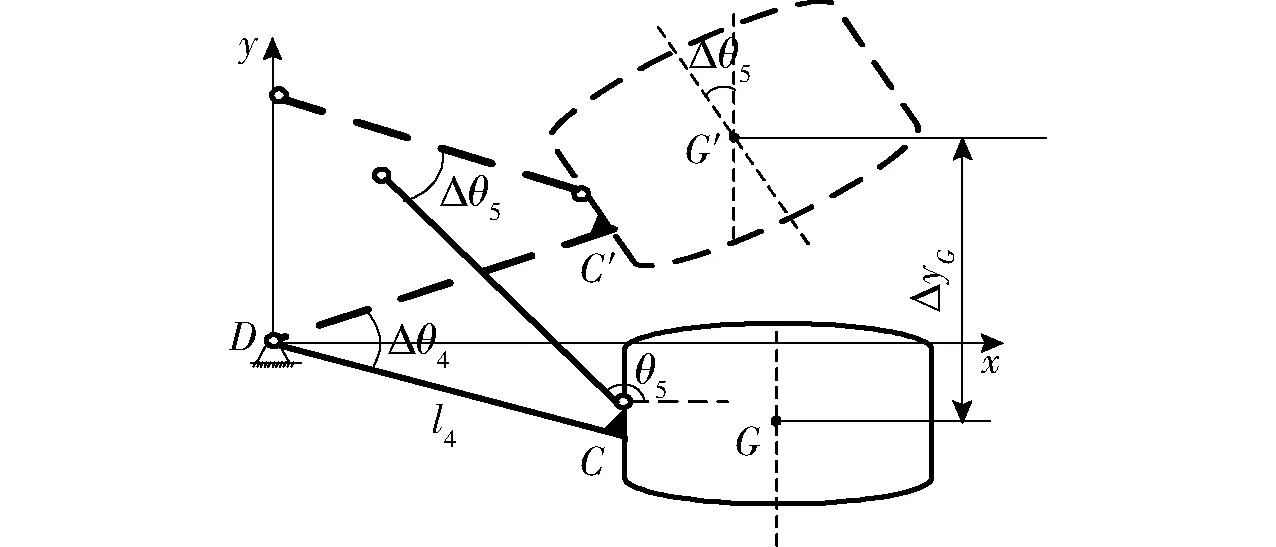
圖3 收放過程中行走機構運動示意圖Fig.3 Schematic diagram of travelling mechanism during retracting
根據平面運動學規律可知:
ΔθG=Δθ5.
(4)
進一步根據矢量旋轉方程:
(5)
式中:
(6)
則
DG′=DC′+C′G′.
(7)
(5)式分別展開,有
(8)
(9)
式中:xD、xC、xC′、xG分別表示D、C、C′、G點的橫坐標;yD、yC、yC′、yG分別表示D、C、C′、G點的縱坐標。
(8)式和(9)式擴充維數,可進一步得到
(10)
(11)
(4)式、(10)式和(11)式即為能夠完整表征行走機構在收放過程中運動狀態的3個參量。
3 懸架參數優化
可收放懸架存在兩種工作狀態,即陸地行進時伴隨崎嶇地面起伏懸架的上下跳動,以及進入水中時對行走機構的收放過程[10]。因此,對于可收放懸架的優化,需要在保證對行走機構實現最大程度收放的同時,還要使懸架在陸地行駛時具有合理的運動學特性,因此需分別針對可收放懸架的收放和陸地行駛兩種工況進行參數優化,懸架水中收放以行走機構收放高度和翻轉角度為優化目標,陸地行駛性能以行走機構外傾角和主銷內傾角為優化目標。
3.1 總體優化策略
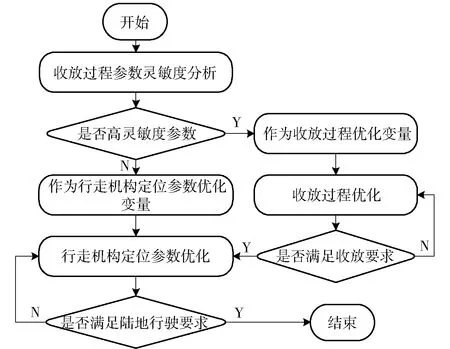
圖4 可收放懸架優化策略Fig.4 Optimization strategy of retractable suspension
可收放懸架的水中收放與陸地減振行駛是兩個聯系的運動過程,對其中一個運動過程的優化會造成機構參數的變化,勢必會影響另一個過程的運動性能。因此,本文將其中一個運動過程的目標函數作為另一個運動過程優化的限制條件,并考慮到可收放懸架系統的參數化表達式中包含大量三角函數,無法直接解出明確的目標函數和限制函數等情況,采用多體動力學軟件ADAMS/Insight模塊有效地區分關鍵參數和非關鍵參數,觀察參數對系統的性能影響,從而在實物樣機制造前,可以綜合考慮各種參數以獲得最優的設計參數。圖4為針對可收放懸架系統水中收放和陸地行進兩個過程的優化策略。
3.2 虛擬實驗設計與優化變量選取
考慮到懸架運動學特性參數的絕對數值相對較小,且對于系統參數的變化較為敏感,實現優化的難度較小,因此首先分別對陸地行駛過程和水上行走收放過程進行實驗設計,并完成靈敏度分析。然后根據變量參數對兩個過程指標參數的靈敏度不同,選擇對收放過程具有高靈敏度且對陸地行駛運動參數靈敏度較低的參數;對收放過程進行優化,采用對收放過程具有低靈敏度且對陸地行駛運動參數靈敏度較高的參數對懸架運動學特性參數進行優化。最后通過對兩個優化結果進行綜合分析并反復優化,確定最終的系統參數。
對于收放過程,由于可收放懸架系統參數取值變化對收放運動效果影響力有所不同,為判斷每個變量對目標的影響程度,進而在機構優化設計中依據影響度大小來選擇優化設計變量,需要對收放過程中的系統參數對目標影響度進行靈敏度分析。可收放懸架有8個關鍵設計點,每個設計點有x軸、y軸、z軸方向各3個坐標參數,如果對所有參數均做優化研究,則有24個變量。根據可收放懸架的工作原理,將各構件簡化為平面內的部件,如圖5所示。進一步固定D點位置,并作為坐標系原點。同時假設下橫臂在設計位置保持水平,因此減振器與下橫臂鉸鏈點C2、叉骨連桿與行走機構鉸鏈點C1的坐標參數只需以x軸坐標作為變量。由于叉骨連桿在整個過程中均與行走機構保持相對固定,行走機構的提升、翻轉以及定位參數均取決于E點和C1,而和減振器與下橫臂鉸鏈點C2無關,因此,實際作為可收放懸架參數靈敏度分析的變量如表1所示。

圖5 可收放懸架系統優化原理圖Fig.5 Schematic diagram of optimized retractable suspension
在設計實驗過程中,通過篩選研究可以分析每個變量對設計目標的貢獻,將實驗縮小到重要因素,并確保不排除重大因素或影響,即對各個設計變量進行靈敏度分析。由于設計變量較多,在對靈敏度進行分析時,采用線性Fractional Factorial設計類型,針對收放過程行走機構的提升高度共進行16次仿真實驗,分析結果如表2所示。
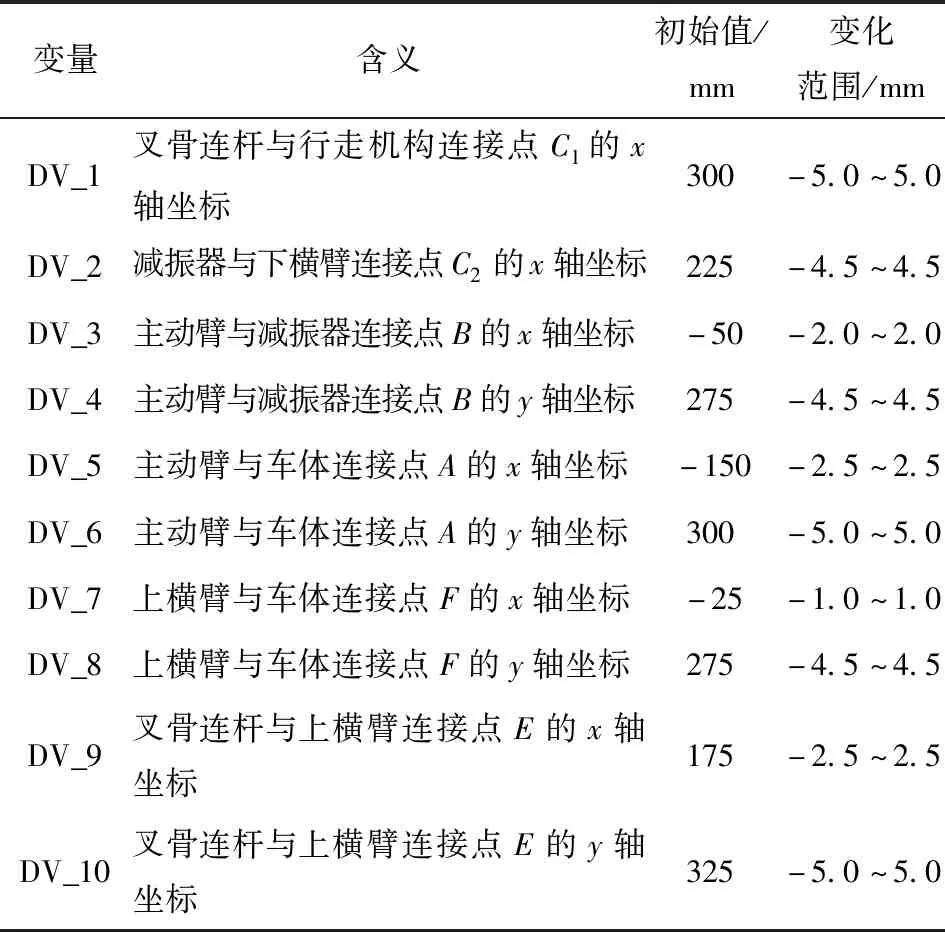
表1 靈敏度分析變量
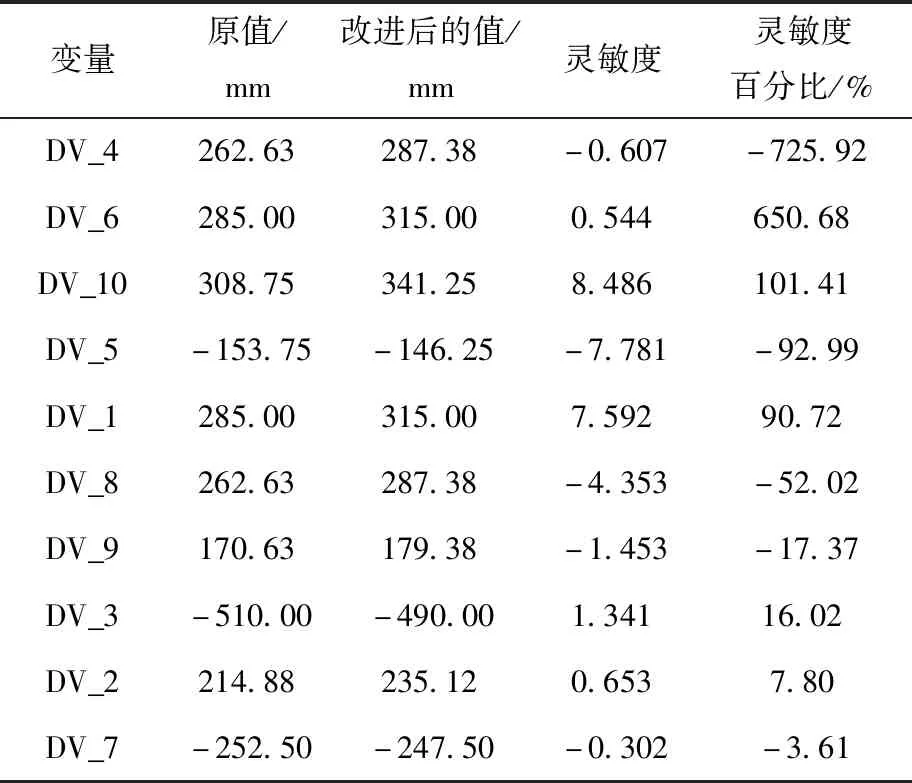
表2 收放過程提升高度靈敏度分析結果
采取同樣的實驗設計方法,針對收放過程行走機構的翻轉角度共進行16次仿真實驗,結果如表3所示。
通過分析行走機構收放高度和翻轉角度的實驗設計結果可知:對兩個目標均具有較大靈敏度的設計變量有DV_4、DV_6、DV_5、DV_1、DV_10、DV_9;對于兩個目標均具有較小靈敏度的設計變量有DV_3、DV_2、DV_7. 由于對水陸兩棲車行走機構的收放中,提升高度的重要性高于翻轉角度,經過綜合考量,選取DV_4、DV_6、DV_10、DV_5、DV_1作為收放過程優化變量;選取DV_3、DV_2、DV_7作為懸架運動學特性優化變量。
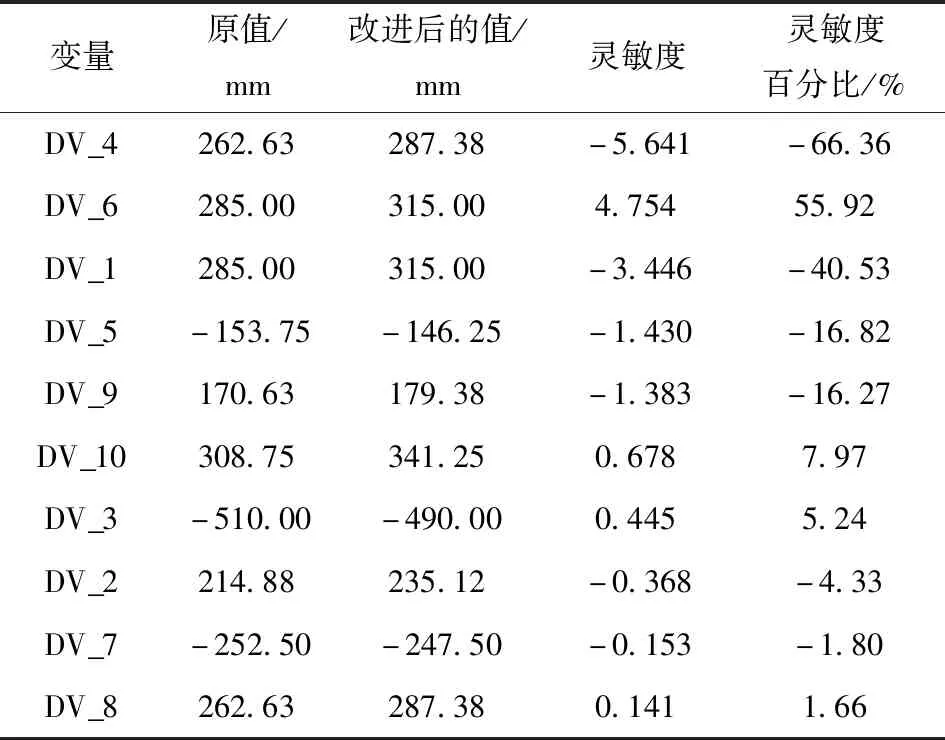
表3 收放過程翻轉角度靈敏度分析結果
3.3 收放指標優化
收放懸架能夠正確實現對行走機構的收放,需要滿足:
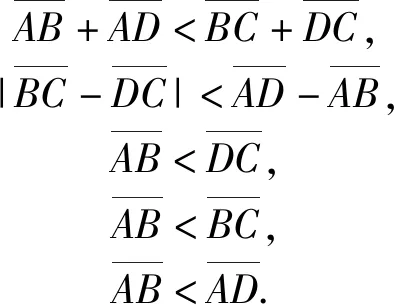
(12)
同時,當收放過程達到四桿機構ABCD的極位,即A、B、C處于同一直線時,機構需要滿足:
(13)
xC1>xC.
(14)
將(1)式和(3)式聯立,作為收放過程優化的限制條件。由3.2節可收放懸架收放過程設計變量靈敏度的分析結果,選取DV_4、DV_6、DV_10、DV_5、DV_1作為收放過程優化變量。以行走機構質心G點的y軸坐標最大值為優化目標,經過多次迭代得到優化后的設計變量值如表4所示。
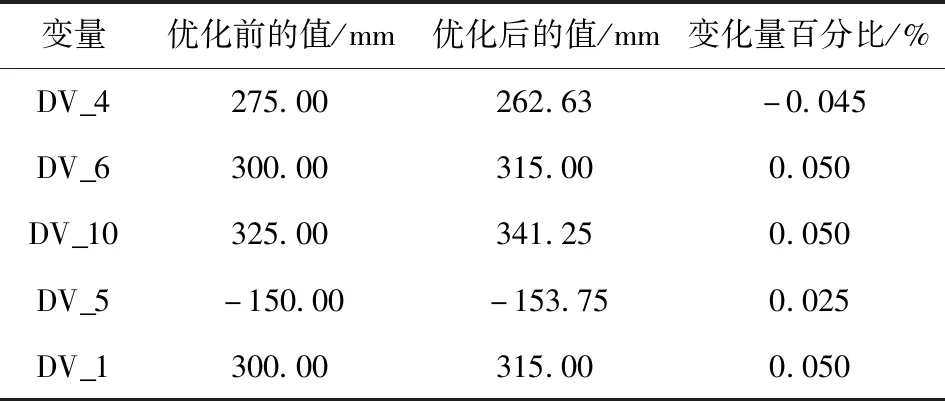
表4 優化設計變量值
優化前和多次迭代后最優化的結果導入MATLAB軟件進行比較,優化前后行走機構的提升高度和翻轉角度對比如圖6和圖7所示。
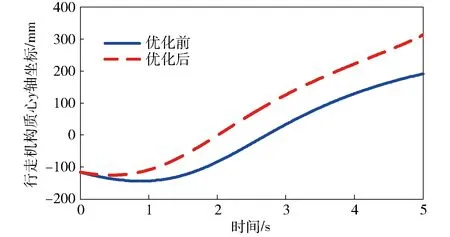
圖6 行走機構提升高度優化Fig.6 Height optimization of travelling mechanism
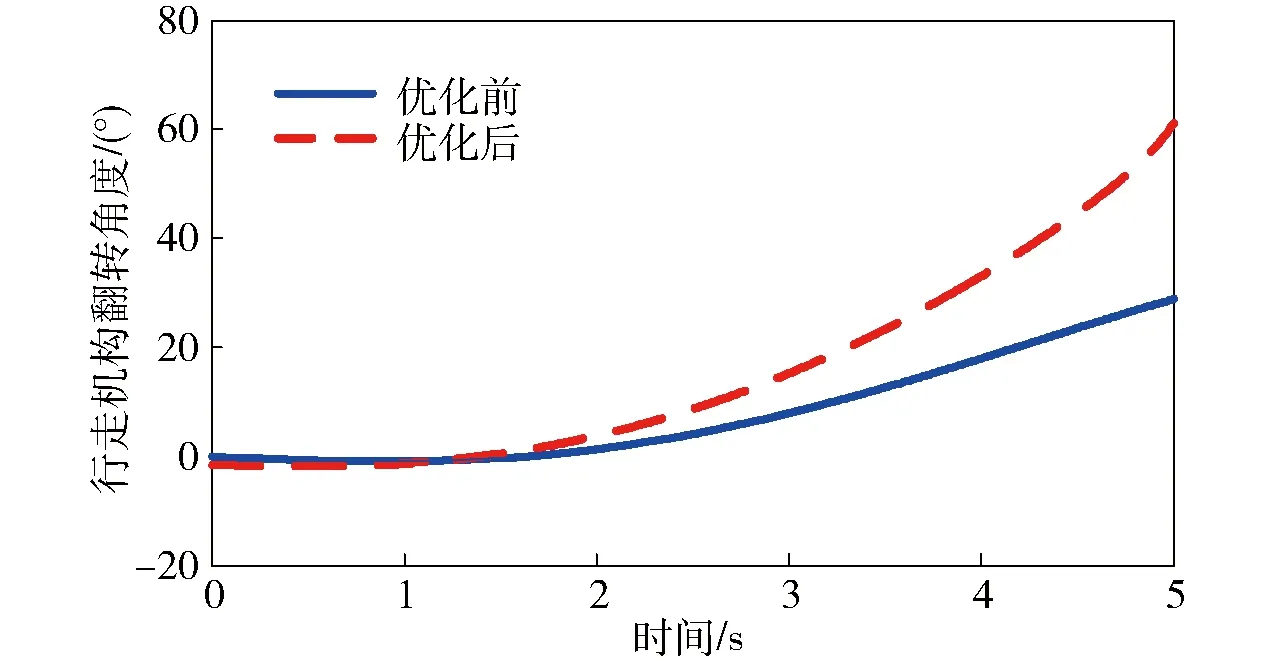
圖7 行走機構翻轉角度優化Fig.7 Flip angle optimization of travelling mechanism
由圖7中優化前后行走機構提升高度的變化曲線可知:優化后提升高度最大值有顯著增加,增加了64.8%. 同時優化后提升速率也得到了增加,即要求提升同樣高度情況下,優化后的系統所需時間更短。行走機構提升前的下放過程中,其下放的最大值在優化后降低了12.9%,即優化后的可收放懸架在對行走機構提升時,初始階段先向下推動的動作幅度得到了減小,符合預期結果。由圖7行走機構翻轉角度變化曲線可知:優化后翻轉角度最大值也有明顯提升,增加了112.2%;但翻轉角度初始值不再是0°,而是-1.56°,需要在行走機構的定位參數優化中做進一步的優化。
3.4 懸架典型運動學特性優化
車輪上下跳動時,懸架運動學特性變化反映了懸架性能。在正常車輪跳動行程內,應使車輪運動特性參數變化量保持在合理范圍內,以保證車輛具有設計所期望的行駛特性[11]。基于上述可收放懸架系統參數優化策略、靈敏度分析以及收放過程優化結果,對懸架運動學特性進行優化。
行走機構定位參數中外傾角γ、主銷內傾角σ以及輪距L的計算公式為
(15)
L=2xG.
(16)
在ADAMS軟件模型基礎上構建實驗臺,同時建立(15)式和(16)式中的外傾角、主銷內傾角、輪距3個測量,然后選取DV_2、DV_3、DV_7、DV_9作為懸架運動學特性優化變量,以最小化主銷內傾角最大值為優化目標,在[-50 mm,50 mm]車輪跳動行程范圍實驗下經過多次迭代,得到優化后的變量如表5所示。
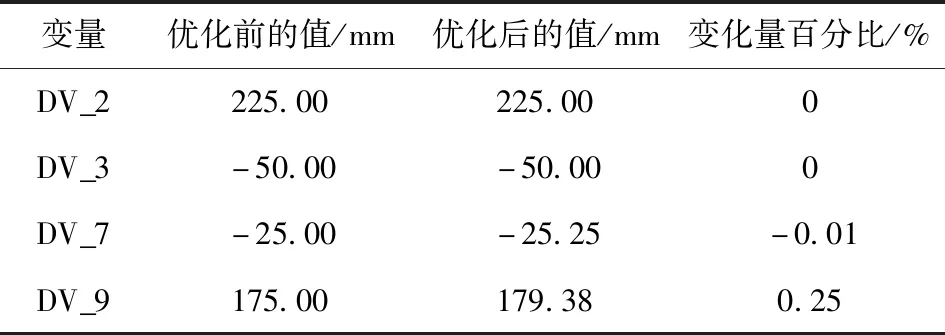
表5 定位參數優化前后變量對比
優化前后測得的主銷內傾角、優化前后的車輪外傾角以及優化前后的輪距分別進行對比,結果如圖8和圖9所示。
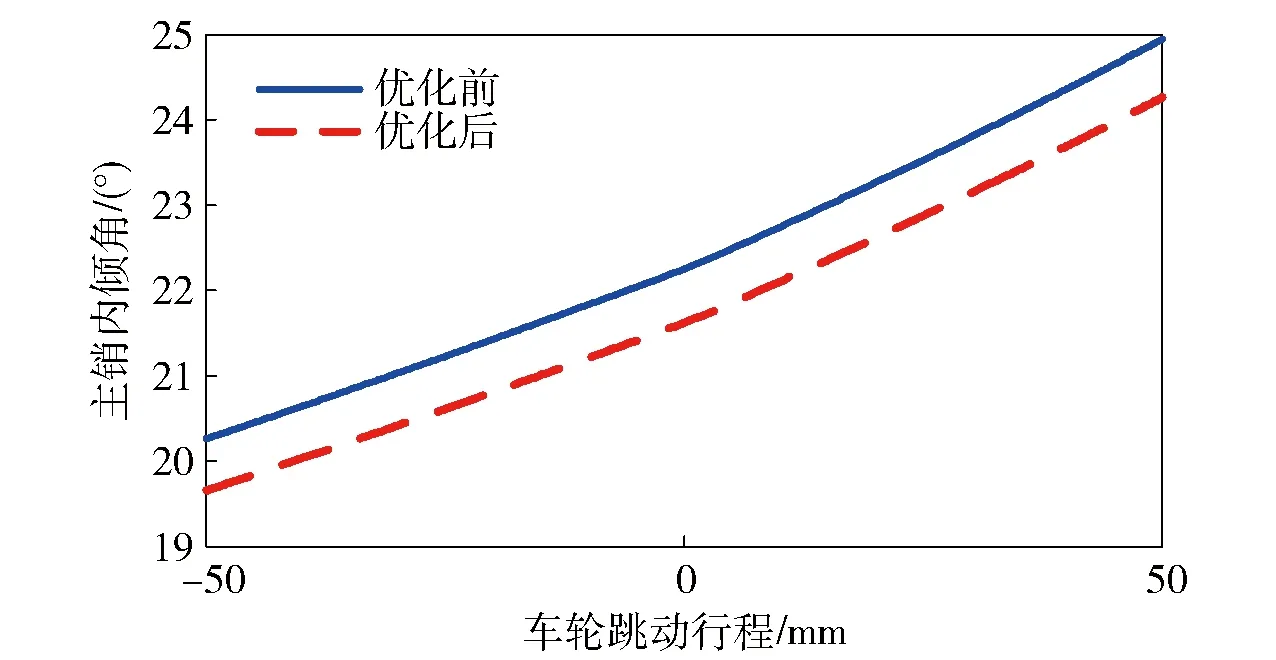
圖8 主銷內傾角優化前后對比Fig.8 Kingpin inclination angles before and after optimization
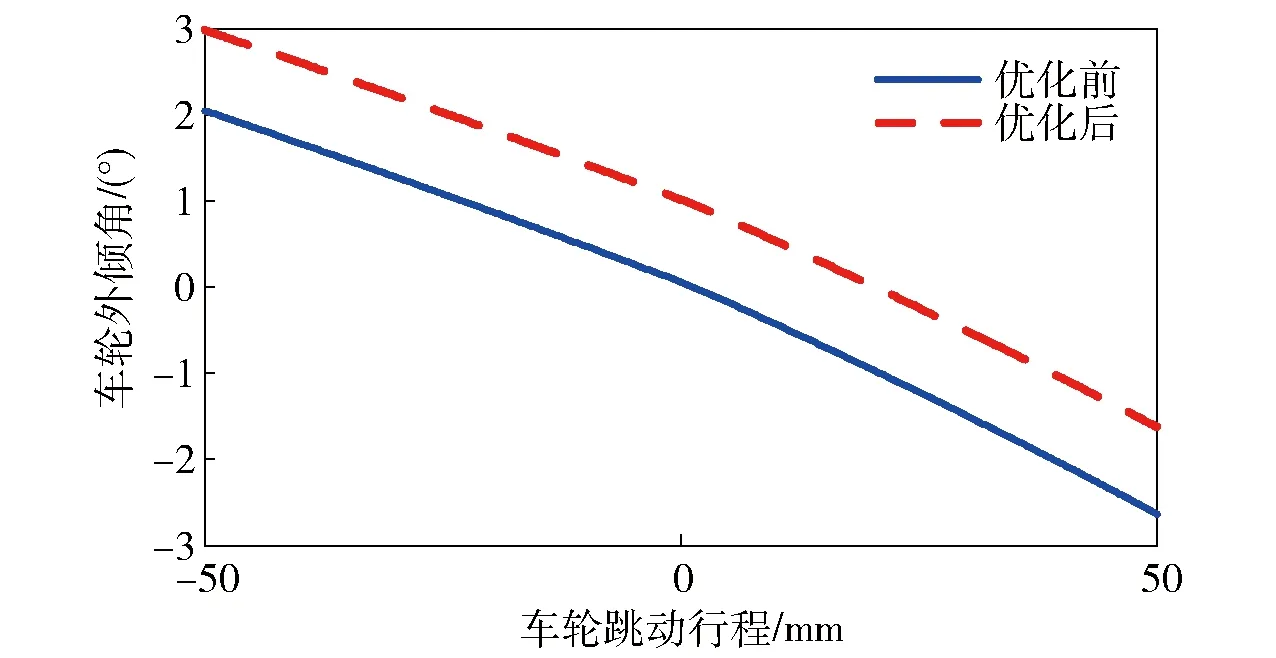
圖9 車輪外傾角優化前后對比Fig.9 Wheel cambers before and after optimization
由優化結果來看,主銷內傾角在[-50 mm,50 mm]車輪跳動行程范圍實驗下最大值、最小值均減小了0.75°,相應的車輪外傾角則整體增加了1°左右,同時平衡位置的外傾角由原來的近似0°增加到了1°,這對于將平臺滿載時其車輪外傾角減小至0°,并減小行走機構的不正常磨損是有益的。因此表明本文所設計的優化方案針對行走機構定位參數的優化是有效的。
4 結論
本文提出了可降低水陸兩棲車輛的水中形狀阻力、提高水中行駛速度的可收放懸架方案,對該懸架運動特性進行了分析與優化。得到以下主要結論:
1) 通過運動學分析得到描述懸架機構運動特性的公式,從而能夠完整表征行走機構在收放過程中運動狀態的3個參量。
2) 設計ADAMS/Insight軟件模塊仿真實驗實現了收放懸架的優化,優化實驗結果證明所選取的優化變量有效,懸架參數優化后行走機構收放高度和翻轉角度顯著提高。
3) 參數優化后,陸地行駛時行走機構的主銷內傾角和外傾角變化更加合理。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45